基于相电压反馈的三电平逆变器死区补偿
2021-04-13 03:22王小鹏朱天亮程东亮
电源学报 2021年2期
王小鹏,朱天亮,程东亮,房 超
(兰州交通大学电子与信息工程学院,兰州730070)
相比两电平逆变器, 中点箝位NPC(neutralpoint clamped)型三电平逆变器的开关应力减小一半,输出波形谐波畸变会更小,目前已在中高压变频调速、不间断电源UPS、电网无功补偿和吸收等领域得到了广泛应用。 实际应用中,为了避免三电平逆变器桥臂直接导通,需要在互补的开关信号中加入一段死区时间延时[2],虽然保证了逆变器工作安全,但由于死区时间、开关管开通延时和关断延时以及导通压降等因素的存在,可能造成输出电压的基波幅值降低和谐波含量增加, 导致系统性能变差,尤其在低调制度时影响更加严重[3-4]。NPC 三电平逆变器每个桥臂有4 个功率开关管和2 个箝位二极管,相对于两电平逆变器,其实际的输出电压偏移更大。同时,桥臂电流的流通方式更多,在进行死区效应分析时也需要对不同输出切换状态分别进行讨论。
针对两电平逆变器的死区效应补偿问题,国内外学者提出了多种补偿方法, 主要包括脉冲宽度调整法[3]、平均误差电压补偿法[5-6]和死区时间消去法[7-8]等,这些方法也都可应用在三电平逆变器的死区补偿中。脉冲宽度调整法根据电流方向直接改变脉宽调制PWM(pulse width modulation)的脉冲宽度,具有较好的补偿效果,但对系统实时性要求较高; 平均误差电压补偿法直接将误差电压加到参考电压,实现相对简单,但补偿精度不如前者;死区时间消去法根据不同的电流极性, 使开关信号互补的两个开关管一个导通另一个关断, 但其在过零区域仍需要插入死区。 无论哪一种方法,都需要对相电流极性进行准确判断, 但由于高频干扰、采样精度和电流纹波等因素影响,容易造成电流方向误判,从而造成电压误补偿。
文献[6]采用一个误差电压矢量对三电平逆变器进行死区补偿,但只考虑了死区时间,没有考虑其他非线性因素;文献[8]在过零区域通过纹波电力分析进行脉冲宽度补偿, 在非过零区则采用死区消去法进行死区补偿;文献[9]为了避免电流极性的误检测, 设置了死区时间跟随电流幅值自适应调节;针对电流过零极性判断问题,文献[10]通过检测二极管的导通状态进行电流极性判断,但需要增加额外的硬件电路;文献[11]根据电流矢量与电压矢量的夹角间接判断电流方向, 其电流方向的判断易受夹角估算精度影响;文献[12]利用相电流和变化率设计了一个模糊观测器来判断电流极性。
针对三电平逆变器的死区补偿问题,本文提出了一种利用相电压反馈的误差电压计算和电流重构相结合的死区补偿策略, 该方法通过相电压反馈,可以对由死区效应造成的误差电压进行实时计算,提高补偿策略的适应性,同时在旋转dq 坐标系下采用卡尔曼滤波,克服传统滤波方法造成的相位延时问题,从而提高电流极性判断的准确性。
1 三电平死区效应分析
NPC 型三电平逆变器拓扑结构如图1 所示,LC 组成滤波电路,Va、Vb和Vc分别 为a、b 和c 相的输出电压。 逆变器每相由4 个功率开关管组成,可以输出3 个开关状态p、o 和n。以a 相为例,当开关管Q1与Q2导通、 输出电压为Vdc/2 时记为p 状态;当Q2与Q3导通、输出电压为0 时记为o 状态;当Q3与Q4导通、输出电压为-Vdc/2 时记为n 状态。开关管Q1和Q3、Q2和Q4开关信号互补。

图1 NPC 三电平逆变器的拓扑结构Fig. 1 Topology of NPC three-level inverter
为方便表述三电平逆变器输出状态,用1 和0分别表示开关管导通和关断,则a 相输出状态与开关管导通关系如表1 所示。

表1 工作状态关系Tab. 1 Relations between working states
1.1 误差电压计算
误差电压计算依据为伏秒平衡原理[13],以a 相为例,定义相电流正方向为桥臂到负载方向,当只考虑死区时间影响,则不同输出状态切换所对应的误差电压如图2 所示。 图中:td为死区时间;V*ao为理想输出电压;Q1、Q2、Q3和Q4分别表示加入死区后4个开关管的驱动信号;V+ao和V-ao分别表示当相电流ia>0 和ia<0 时的实际输出电压;ΔV 表示理想输出电压与实际输出电压的误差电压。

图2 死区时间对输出电压的影响Fig. 2 Influences of dead-time on output voltage
由图2 可以看出:当ia>0 时,状态n 到o 以及状态o 到p 的切换都会产生一个幅值为Vdc/2、长度为td的正向误差电压;当ia<0 时,状态p 到o 以及状态o 到n 的切换都会产生一个幅值为Vdc/2、长度为td的负向误差电压。 具体切换状态所对应的误差电压如表2 所示。
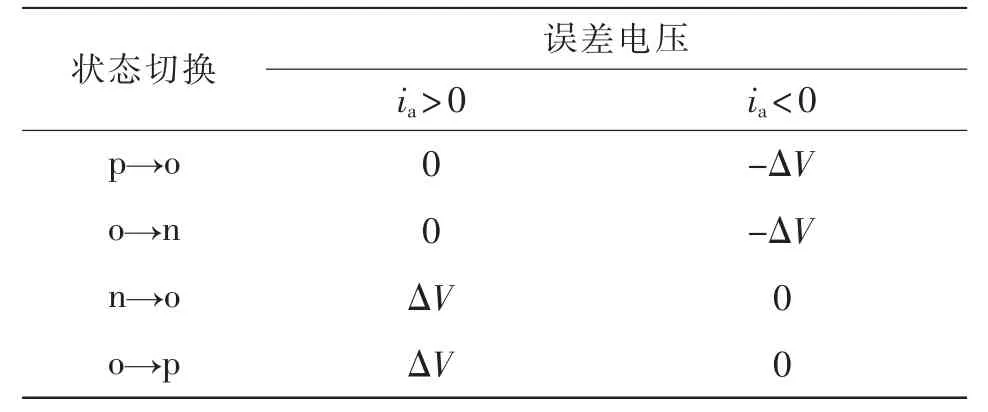
表2 不同状态切换对应的误差电压Tab. 2 Error voltages corresponding to switching between different states
当考虑开关管开通延时和关断延时以及开关管与二极管导通压降时, 对于opo 输出状态切换,死区效应对输出电压的影响如图3 所示。 在图3中, 开关管Q2和Q4分别处于导通和关断状态,Q1和Q3分别表示加入死区后开关管的驱动信号,Q"1和Q"2分别表示考虑开关管开通延时、 关断延时以及导通压降时所对应的驱动信号,ton和toff分别表示开关管开通延时和关断延时,Vs和Vd分别为功率开关管和二极管的导通压降,Vao+和Vao-分别表示当相电流ia>0 和ia<0 时的实际输出电压。
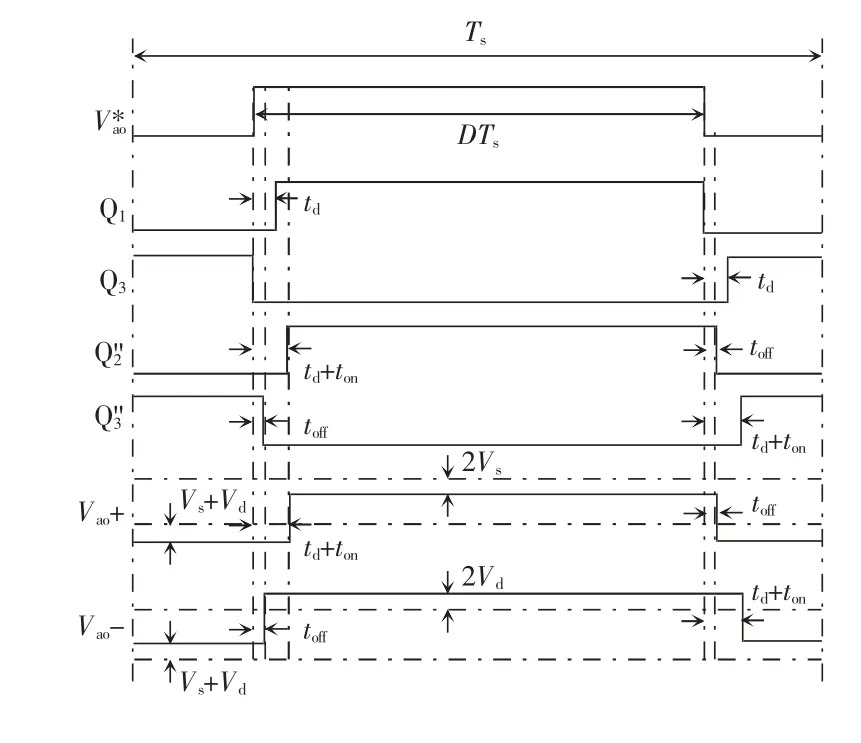
图3 死区效应对输出电压影响Fig. 3 Dead-time effect on output voltage
根据伏秒平衡原理,理想输出电压等于实际输出电压与误差电压之和。根据图3 可推导出,当ia>0时所对应的伏秒等效关系为
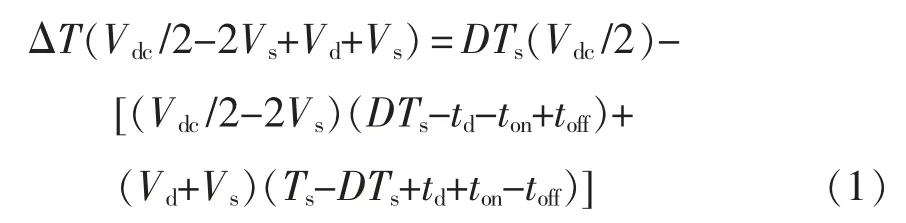
式中:Ts为开关周期;D 为输出电压的占空比;Vdc为母线侧直流电压。 对式(1)进行化简可得

最终得到

同理,可以推导出当ia<0 时的误差时间为

同理,可对b 和c 相误差时间进行分析,忽略部分微小量,则式(3)和式(4)中ΔT 可表示为

对于传统空间矢量脉宽调制SVPWM(space vector pulse width modulation),在一个开关周期内,各相开关状态只有2 次切换,由表2 可知,只需要对其中一次进行补偿。 定义ΔV 为
三相输出平均误差电压可以表示为

由式(7)可计算出各相在一个开关周期所对应的误差电压,但从式(6)可知,ΔV 计算包含了功率开关管的开通和关断延时、功率开关管和二极管的导通压降, 这些参数会随着负载电流和温度而变化,通过式(7)计算的平均误差电压难以实现对死区效应的准确补偿。
1.2 误差电压谐波分析
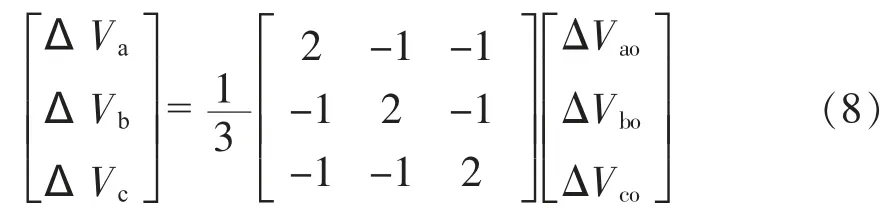
为了进一步探讨误差电压对逆变器输出相电压的影响,将三相输出平均误差电压转换到三相相电压的误差电压[14],即
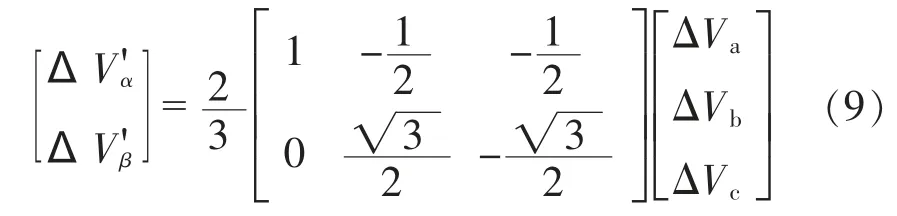
通过Clark 变换可以将三相误差电压转换到两相αβ 静止坐标系,有
通过Park 变换和傅里叶级数展开, 可得在dq旋转坐标下的误差电压为

式中:δ 为参考电压矢量与同步旋转坐标系q 轴负半轴的夹角;ω 为输出电压的基波角频率。 可以看出ΔV'd和ΔV'q都包含有直流分量和6 次谐波分量, 因此受死区效应影响的输出相电压在dq 轴的分量中也会含有6 次谐波和直流分量。 当δ=0 时,在dq 旋转坐标下的误差电压为

此时,ΔV'd仅包含有6倍基波的频率分量,而ΔV'q则含有比较大的直流分量,其所含的6 次谐波含量大约相当于ΔV'd中的1/6。 同时,在αβ坐标系和三相静止坐标系中,死区效应主要给相电压带来5 次和7 次谐波。
2 死区补偿策略
由于功率开关管和二极管的参数会随着负载电流和温度变化,通常是根据所选器件的数据手册来获得,一些文献中也通过建立这些量与导通电流的近似直线关系来对这些量进行估计,但都存在一定的误差,无法准确计算误差电压,难以实现准确的死区效应补偿。 因此,死区效应准确补偿涉及到误差电压在线计算和电流极性判断2 个关键步骤。
2.1 误差电压在线计算
由式(10)可知,同步旋转坐标系下的电压误差ΔV'd和ΔV'q都与平均误差电压ΔV 的幅值有关,因此,可根据三相相电压在同步旋转坐标下的分量以及参考电压, 对平均误差电压进行在线计算,误差电压在线计算的关键是需要预先知道δ 的大概取值,来估计dq 轴的误差电压分量,然后将主要含有交流分量的轴分量用于控制误差电压的增量大小,将主要含有直流分量轴分量控制电压增量的符号,两者共同构成对误差电压值的在线计算。 比如当δ=0 时,ΔV'd主要包含6 次谐波的交流分量,ΔV'q主要包含有直流分量。
图4 为当δ=0 时误差电压在线计算原理框图,其中Vm表示参考电压幅值。 则误差电压可表示为

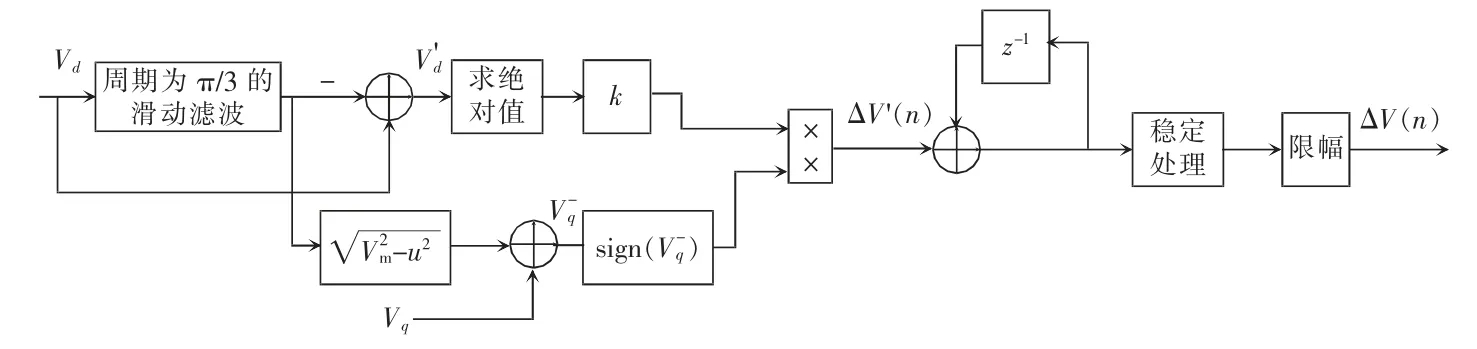
图4 误差电压在线计算原理框图Fig. 4 Block diagram of principle of error voltage on-line calculation
式中:ΔV(n)为当前时刻估计的误差电压;ΔV(n-1)为前一时刻估计的误差电压;ΔV'(n)为当前时刻误差电压的增量估计;k 为比例系数;V'd为Vd中所含的交流分量。
误差电压在线计算主要包含以下步骤。
频骤1将三相相电压从静止坐标系转换到dq 旋转坐标系,得到电压Vd与Vq。
频骤2由于Vd受到死区效应影响,包含大量6 次谐波和少量直流分量。 因此, 可以π/3 为周期进行滑动滤波求出其直流分量,并将其含有的交流分量分离出来。 以周期π/3 进行滑动滤波之后,弱化了电压相位延时的影响,相邻采样点所计算出的误差电压变化不大, 因此LC 参数造成的电压相位延时也可忽略。
频骤3Vq主要包含直流分量, 死区效应影响会造成其幅值增大或减小, 通过与目标幅值比较所得的V-q,可以判断当前系统处于过补偿还是欠补偿状态,从而动态调整误差电压增量的符号。
频骤4通过式(11)进行迭代,平均误差电压ΔV(n)逐渐趋向于某一正值。
由式(12)计算出的平均误差电压ΔV(n)会围绕其稳定值上下波动,造成补偿系统的过补偿或欠补偿。 经过分析可知,误差电压ΔV(n)波动幅值主要与比例系数k 有关, 一方面可以适当减小k 值,另一方面需对平均误差电压做稳定处理,即
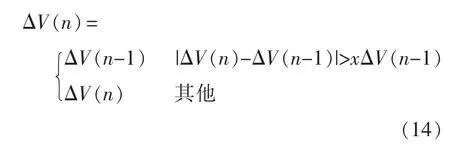
式中,x 为因子,需选取合适值。 其x 值过大影响平均误差电压计算精度,进而影响补偿效果;偏小则稳定性变差。 为了提高死区补偿系统的稳定性,需在最后进行限幅判断,将误差电压ΔV(n)限制在某一合理的范围内。
2.2 电流极性判断
在实际应用中,电流往往含有滤波电感纹波电流, 同时AD 采样通道会受到高频开关信号干扰。在轻载条件下,负载电流比较小时,死区效应会导致电流在过零点处反复穿越, 出现零电流箝位现象,从而导致因电流极性判断困难而产生死区效应的误补偿,增大了逆变器输出的谐波含量。 为了准确判断电流极性, 采用卡尔曼滤波和电流重构[15-16]实现。
卡尔曼滤波[17]是一种基于线性系统状态方程和均方误差最小准则,根据系统前一时刻估计值和当前时刻观测值对系统输出进行最优估计的算法。通过建立合适的模型,可以从受到干扰的电流测量值中估计出电流最优值。 三相电流转换到同步旋转坐标系中可得到电流id和iq,这两个电流都近似是随时间缓慢变化的参数,据此可分别对其进行卡尔曼滤波。 以id为例,其离散化后的卡尔曼滤波表示为
从式(18)可知,kk越大测量值占权重越大,否则预测值占权重大。R 和Q 选取对于滤波效果有较大影响,通过调节采样周期、测量噪声和系统噪声方差,可以有效保证滤波前后的三相电流保持相同的相位,也可以使卡尔曼增益在经过迭代后快速趋近于合适值,达到较好的滤波效果,还可基本解决因卡尔曼滤波算法计算量较大可能对造成重构电流信号的延时问题。
图5 为提出的死区补偿策略控制框图,可以看出,经过滤波后的电流需重构到三相静止坐标系中然后进行电流极性的判断,同时三相误差电压需要转换到αβ 坐标系下, 并且以前馈方式补偿于参考电压。

图5 死区补偿策略控制框图Fig. 5 Control block diagram of dead-time compensation strategy
3 仿真结果与分析
在Matlab/Simulink 环境下建立三电平逆变器的仿真模型,并在开环条件下对提出的补偿方法进行验证。 仿真参数:直流侧电压为740 V;直流侧分压电容C1=C2=1 000 μF,滤波电感为1.26 mH,滤波电容为40 μF,开关频率为5 kHz,输出基波频率为50 Hz,目标电压幅值100 V(调制比为0.23),各相负载都为R=10 Ω, 与死区效应有关的参数配置如表3 所示。
图6(a)~(c)分别为死区补偿前、传统死区补偿(只补偿死区时间所造成的误差电压)和本文方法补偿后的三相电压波形和a 相电压的频谱。从图6(a)可以看出,由于死区效应影响,造成输出电压基波幅值减小,谐波含量增大;采用传统死区补偿方法后,基波幅值补偿较大,a 相谐波含量从4.46%下降到2.08%,但基波幅值仍未达到目标电压幅值,存在死区效应欠补偿;由图6 中(e)可以看出,采用本文方法进行补偿后, 三相输出电压幅值逐渐增大,在0.025 s 时基本达到目标值,同时a 相电压谐波也进一步下降到1.73%, 所含的5 次与7 次谐波含量也大幅下降。
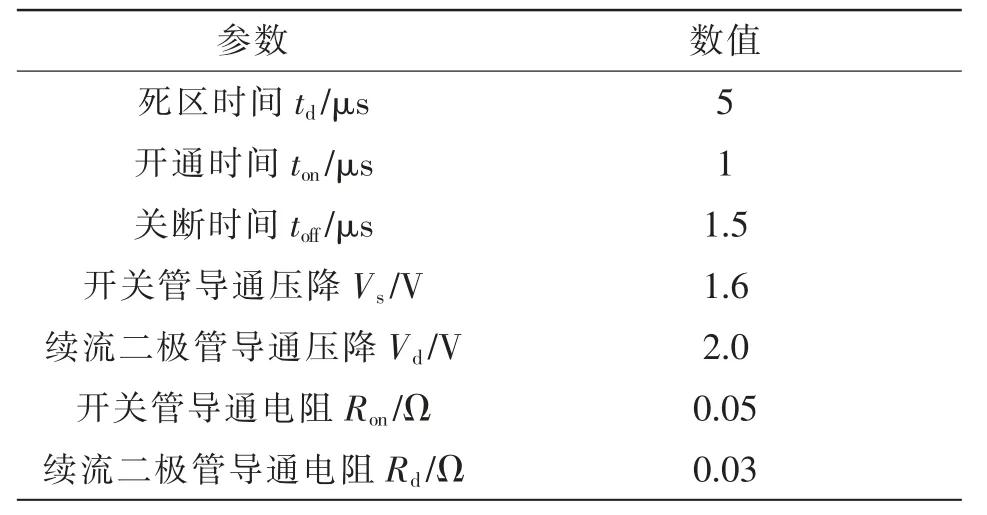
表3 死区效应相关参数设置Tab. 3 Setting of related parameters of dead-time effect
本文方法在线计算的误差电压及其在αβ 轴上的波形如图7 所示, 仿真采用π/3 为周期执行式(14)迭代操作,通过选择合适的x 值可以使得补偿更加准确,本文选取x 值为0.02。 从图7(a)可以看出,补偿电压从0 逐渐上升,在0.025 s 时稳定在某一值,基本保持不变;相较于传统方法,本文方法可以在线计算误差电压,具有较好的补偿效果,提高了补偿系统的稳定性。 图7(b)为在αβ 轴上的前馈的补偿电压波形,其在0.025 s 时补偿达到稳定。
图8 为卡尔曼滤波前后的电流波形。卡尔曼滤波参数设置为: 采样周期0.5 ms,R=1 Ω,Q=0.02 A2。 从图8(a)可以看出,死区补偿前三相电流含有较多谐波,过零处存在零电流箝位现象,经过滤波重构后三相电流谐波含量减小, 波形更加光滑,通过与滤波前电流的对比发现,滤波重构后的电流没有产生相位偏移和幅值减小,在过零点处的电流极性判断也更加容易,从图8(b)可以看出,经本文方法补偿后滤波前电流在过零点处的谐波幅值明显减小,电流箝位现象得到改善。

图6 三相电压波形与a 相频谱Fig. 6 Three-phase voltage waveforms and phase-a frequency spectrum

图7 平均误差电压及其在α、β 轴的波形Fig. 7 Average error voltage and its waveforms on α,β axises

图8 卡尔曼滤波前后的电流波形Fig. 8 Current waveforms before and after Kalman filtering
4 结语
本文分析了死区效应对三电平逆变器输出电压的影响,提出了一种基于相电压反馈的自适应死区补偿策略。 该方法在dq 同步旋转坐标系下对误差电压进行在线计算, 并以前馈的形式补偿在αβ轴的参考电压上;同时,采用卡尔曼滤波和电流重构实现对输出电流极性的准确判断。 仿真结果表明,相比传统补偿方法,本文方法对逆变器参数变化具有良好的适应性,可有效改善零电流箝位现象和输出电压波形。
猜你喜欢
莆田学院学报(2021年5期)2021-11-13
工程数学学报(2020年6期)2021-01-09
甘肃科技(2020年20期)2020-04-13
通信电源技术(2018年3期)2018-06-26
科技创新与应用(2017年1期)2017-05-11
航空兵器(2016年5期)2016-12-10
电测与仪表(2016年1期)2016-04-12
电测与仪表(2016年22期)2016-04-12
电子工业专用设备(2015年4期)2015-05-26
电测与仪表(2015年2期)2015-04-09