基于下垂控制模式的独立微电网小干扰稳定分析
2021-04-13 03:23许傲然谷彩连刘宝良
电源学报 2021年2期
许傲然,谷彩连,高 兢,刘宝良,孙 卓,李 山
(1.沈阳工程学院电力学院,沈阳110136; 2.国家电网公司辽阳供电局,辽阳111000;3.国家电网公司中州换流站,郑州450051)
近年来,随着光伏、风电等可再生能源装机容量的逐年增长,分布式发电技术得到广泛应用[1]。微电网作为各种分布式的接入电源能够充分发挥分布式发电技术的优势并减小其对电网的影响。作为综合分布式电源的典型,微电网通过集成先进的电力电子技术、控制技术以及通信技术能够实现并网运行及独立运行,在一定程度上提高了系统供电可靠性和灵活性[2-3]。 逆变器是微电网的核心单元,其运行的稳定性对于微电网的输出特性影响重大。而微电网中过多的逆变器接口将会使微电网系统惯量变小,极易发生失稳。在孤立情况下,微电网系统能否保持小扰动稳定是判断独立微电网系统是否具有稳定性的重要判据之一[4]。因此,从电力系统运行原理出发,开展独立微电网系统运行稳定性研究对于促进分布式发电技术的发展具有重要意义。
目前,国内外许多学者已对微电网系统小扰动稳定性展开研究。 文献[5-6]基于特征值分析法对风力发电系统的小干扰稳定性进行了分析,并总结了影响系统稳定运行的主要因素;文献[7]对直流微电网系统进行小扰动电压稳定性分析,得到变流器控制参数变化的系统特征值轨迹;文献[8-9]对风储联合系统、 光储联合系统进行小干扰稳定性分析,得到参数变化时的系统特征值轨迹,根据特征值轨迹对系统参数进行初步优化,并通过仿真验证了系统小干扰稳定性分析的有效性;文献[10-11]对采用下垂控制DC(droop control)的微电网进行了小干扰稳定性分析, 所采用的DC 仅涉及P/f-Q/V 下垂控制特性,在经过P/f-Q/V 下垂控制特性后直接进行电压合成并生成PWM 信号,模型中不涉及电压外环和电流内环双闭环控制,DC 策略模型构建及分析过程过于简化。在含有电压外环和电流内环双闭环控制的DC 模式中,电压外环和电流内环双闭环控制的主要作用是实现恒流和恒压控制,改善系统的动态响应;然而,在进行含有电压外环和电流内环双闭环控制的DC 模式独立微电网小干扰稳定性分析过程中,电压外环和电流内环双闭环控制会增加系统状态空间矩阵的阶数,使分析难度加大。
本文以包含电压外环和电流内环双闭环控制的DC 模式为基础,开展独立微电网系统的小干扰稳定性研究。 首先,构建基于DC 模式的独立微电网系统数学建模,基于线性化理论进行小扰动线性化分析, 并求出系统的小扰动线性化状态矩阵;其次,基于李雅普若夫判据理论,对系统小扰动线性化状态矩阵的特征值进行分析,并逐一改变系统各个参数取值范围,求取状态矩阵特征值变化的根轨迹;最后,基于状态矩阵特征值变化根轨迹确定系统各参数初步优化结果,并与各参数优化前的系统状态矩阵特征值分布情况及实验分析相对比。
1 独立微电网等效电路
常见的微电网逆变器控制主要包括:PQ 定功率控制模式、V/f 控制模式和DC 模式。 PQ 定功率控制模式常用于微电网并网运行过程中的逆变器控制和V/f 控制模式常用于微电网在孤岛运行过程中的逆变器控制;DC 模式综合了PQ 定功率控制模式和V/f 控制模式两种控制模式的优点,用于微电网系统的并网运行、 孤网运行以及并/离网切换过程等。 因此,本文以DC 模式为基础,进行独立微电网小干扰稳定性分析研究。
本文采用的基于DC 模式的独立微电网典型模型示意如图1 所示。 在独立微电网系统中,2 个微电源逆变器控制均采用DC 模式;DC 模式下独立微电网系统能够自发实现系统功率分配以及频率与电压的调整;滤波装置采用LC 滤波电路。为简化研究对象,将分布式电源DG1和DG2等效为直流恒压源,2 个微电源逆变器采用DC 模式,控制参数相同。
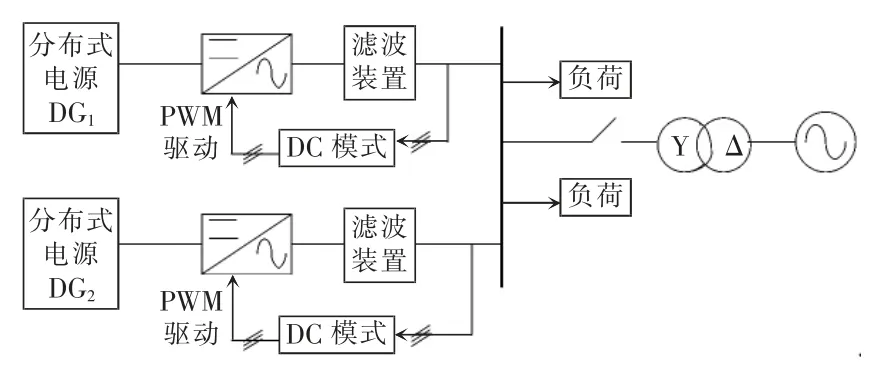
图1 基于DC 模式的独立微电网典型模型示意Fig. 1 Schematic of typical model of independent microgrid based on DC mode
2 基于DC 模式的独立微电网控制策略及数学模型
基于DC 模式独立微电网逆变器的控制框图如图2 所示。 独立微电网逆变器网侧采用LC 滤波电路,在dq 坐标系下其数学模型为

式中:V0d、V0q和i0d、i0q分别为独立微电网逆变器经Lf/Cf波输出的三相电压V0abc、 三相电流i0abc通过abc/dq0 变换后得到的电压和电流d、q轴分量;ω 为交流母线电压对应的角频率;rf和Lf分别为滤波电阻和电感;Cf为滤波电容;Vd、Vq和id、iq分别为独立微电网逆变器输出的三相电压Vabc和三相电流iabc通过abc/dq0 变换后的得到电压和电流d、q 轴分量。
独立微电网逆变器的DC 是利用分布式电源输出的有功功率和频率存在线性关系、而无功功率和电压存在线性关系的原理来进行控制[10]。 基于DC模式的独立微电网逆变器输出瞬时有功功率p~和无功功率为

瞬时功率经过一阶低通滤波器可以得到平均功率为

式中:ωc为截止角频率;P、Q 分别为平均有功功率和平均无功功率。
基于DC 模式的独立微电网逆变器输出电压频率ω 和幅值E 的下垂特性方程为

式中:ω0和E0分别为基于DC 模式的逆变器输出的额定角频率和额定电压幅值;mp和nq分别为有功下垂系数和无功下垂系数;Pref和Qref分别为基于DC 模式的逆变器参考有功功率和参考无功功率。
基于DC 模式的逆变器在经过DC 之后需经过电压外环和电流内环双闭环控制。电压外环和电流内环双闭环控制如图3 所示。

图2 独立微电网逆变器DC 模式的控制框图Fig. 2 Control block diagram of independent microgrid inverter in DC mode

图3 电压外环和电流内环的双闭环控制Fig. 3 Double closed-loop control of voltage outer loop and current inner loop
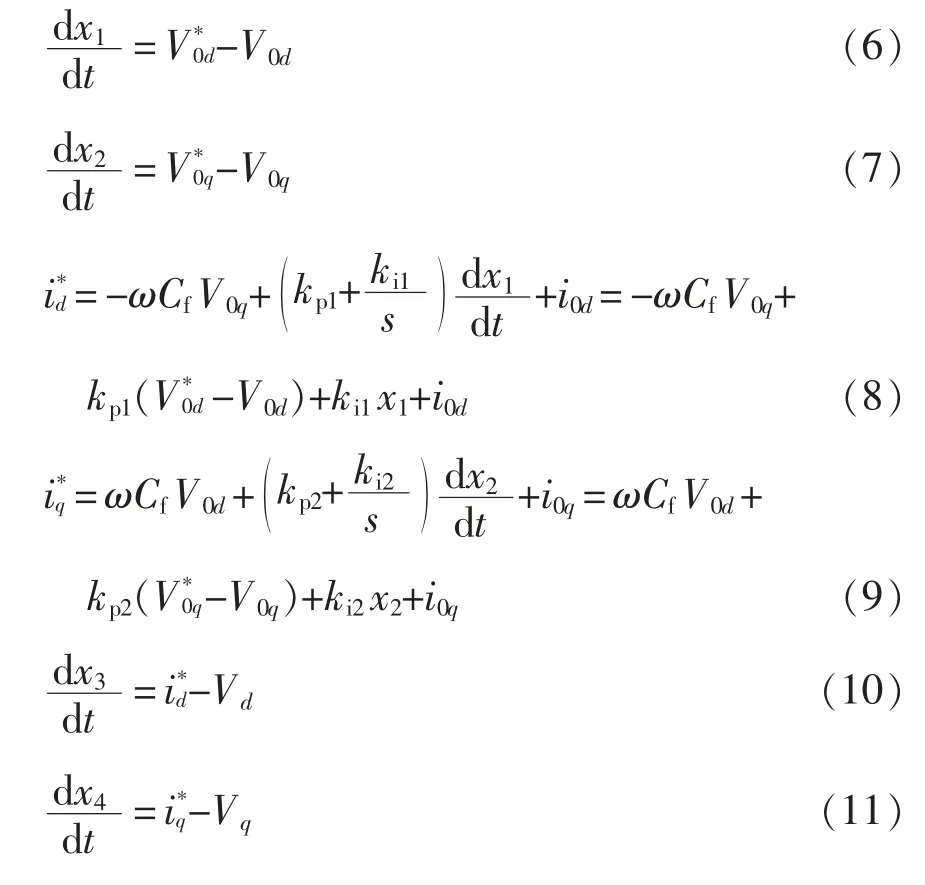
电压外环和电流内环双闭环控制的数学模型分别为

3 小干扰稳定性分析原理
在独立微电网系统中,设系统在稳态运行点处的状态为x0,输入量为u0,且x0和u0满足


当在系统上施加Δx 和Δu 的小扰动时,满足

则式(15)和式(16)可变为

将式(17)和式(18)在x0处进行泰勒公式展开并进行线性化处理,可得
式中,i=1,2,…,n;j=1,2,…,m。 通过简化得

式中:A 为n×n 阶方阵;B 为n×r 阶矩阵;C 为m×n阶矩阵;D 为m×r 阶矩阵。
对于独立微电网系统而言,其线性系统的稳定性取决于线性系统的状态矩阵A。 由李雅普若夫判据可知, 状态矩阵A 所有特征值实部均为负时,系统处于渐进稳定状态;状态矩阵A 至少有一个特征值的实部为0,而其他特征值实部为负时,系统处于临界稳定状态;状态矩阵A 至少有一个特征值实部为正时,则说明系统处于不稳定运行状态。
4 独立微电网小干扰状态空间模型及特征值分析
4.1 独立微电网小干扰状态空间模型
将式(1)~式(13)进行小干扰稳定线性化分析和简化,可得独立微电网系统小干扰状态空间方程为
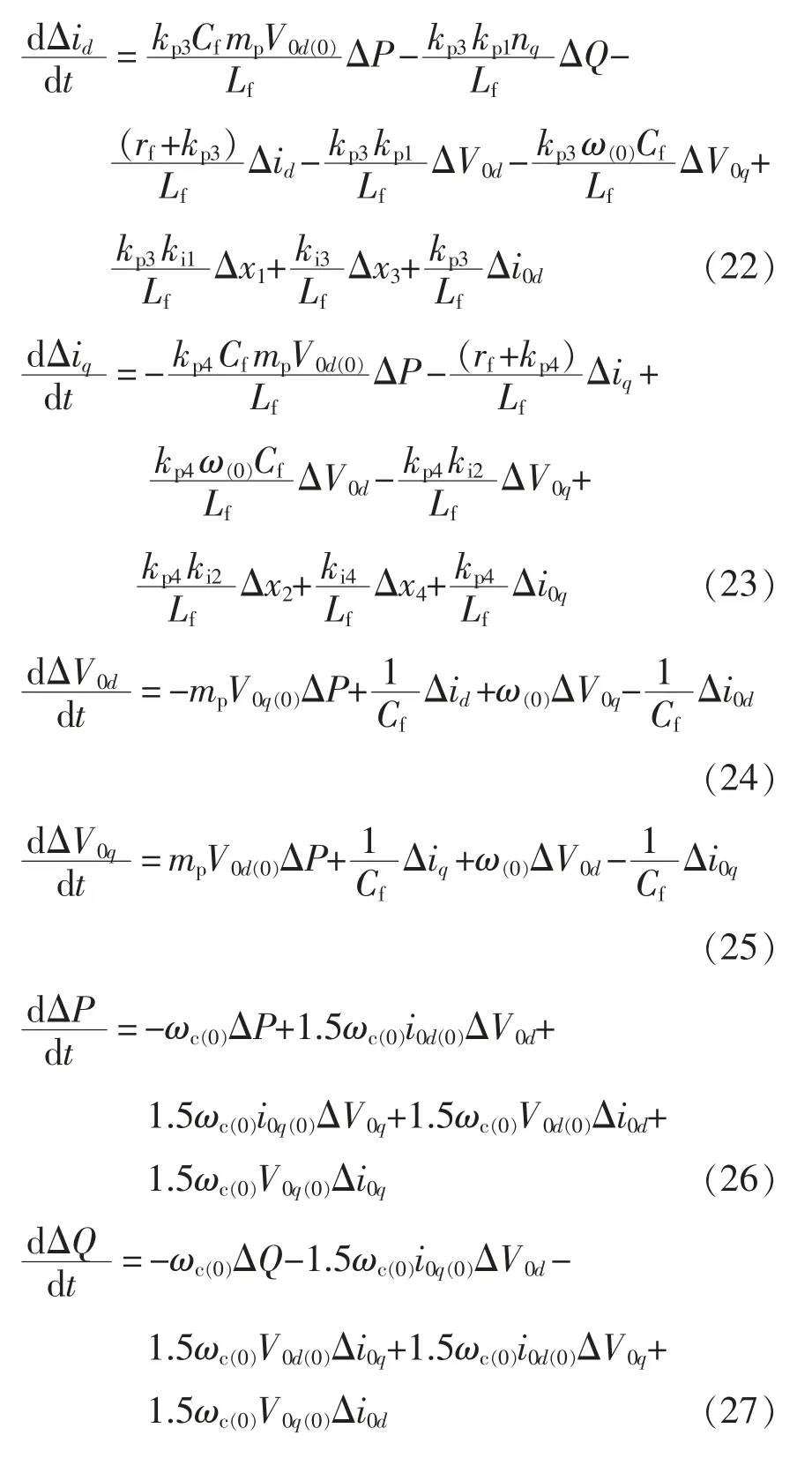

式 中,ω(0)、ωc(0)、i0d(0)、i0q(0)、V0q(0)、V0d(0)分 别 为 相 关 对应变量的稳态值。基于式(21),由式(22)~式(31)的推导结果可知,独立微电网系统小干扰稳定线性化状态矩阵A 为



4.2 独立微电网小干扰稳定特征值分析
基于第3 节小干扰稳定性分析和判据以及第4.1 节推导出的独立微电网系统小干扰稳定线性化状态矩阵A, 进行独立微电网系统的稳定性分析。基于DC 模式的独立微电网在某一运行状态下的参数选取见表1。

表1 基于DC 模式的独立微电网参数选取Tab. 1 Parameter selection of independent microgrid based on DC mode
基于表1 的基于DC 模式的独立微电网在某一运行状态下的参数,可计算得到独立微电网系统小干扰稳定线性化状态矩阵A 的特征值,状态矩阵A 的特征值如表2 和图4 所示。
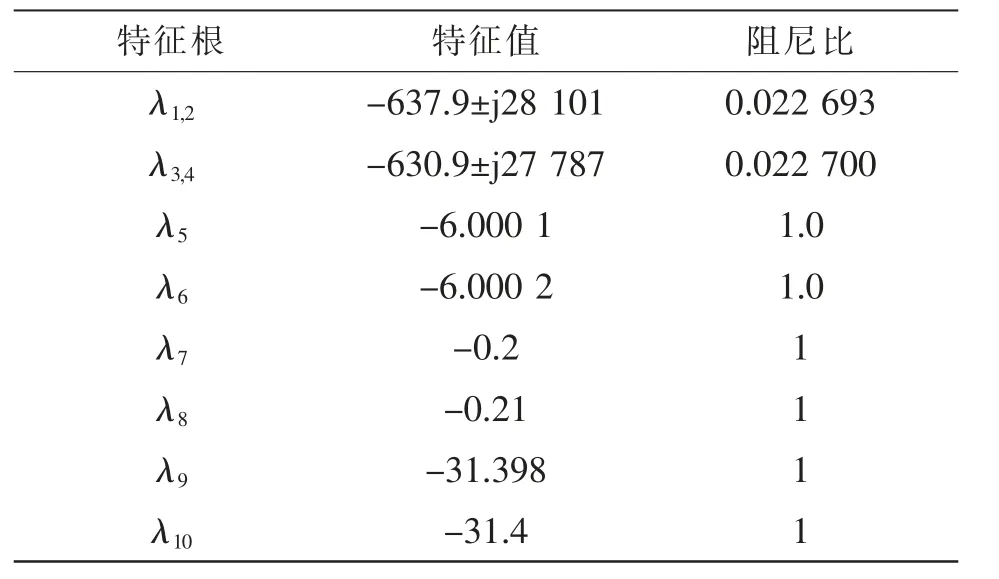
表2 独立微电网系统小干扰稳定线性化状态矩阵A特征值Tab. 2 Eigenvalues of small disturbance stability linearization state matrix A for independent microgrid system
基于李雅普若夫判据理论, 根据表2 和图4,在该状态下独立微电网系统处于稳定运行状态,且系统存在2 个衰减模态和6 个振荡模态。但特征值λ5、λ6、λ7、λ8的特征值实部接近于0,系统存在不稳定运行的风险。 因此,为保证独立微电网系统处于稳定运行状态,需要对系统中的主要控制参数进行优化设计。
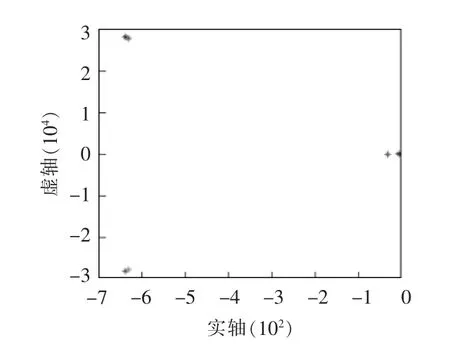
图4 独立微电网系统小干扰稳定线性化状态矩阵A特征值Fig. 4 Eigenvalues of small disturbance stability linearization state matrix A for independent microgrid system

图5 控制参数kp1 改变时主要特征值的根轨迹Fig. 5 Root locus of main eigenvalues when the control parameter kp1 changes
在进行独立微电网系统的参数优化之前,需要确定能够保持系统稳定运行的各个控制参数和变量的取值范围。 根据表1 中提供的参数值,逐一改变独立微电网系统小干扰稳定线性化状态矩阵A中各控制参数的取值范围,可得到状态矩阵A 中主要特征值的变化根轨迹,状态矩阵A 中主要特征值的变化根轨迹分别如图5~图15 所示。
如图5 所示,kp1取值范围为[0.05, 100]时,系统小干扰稳定线性化状态矩阵A 所有特征值均位于s 平面左半部分,且随着kp1控制参数增大主要特征值总体变化趋势为:λ1、λ2特征值以共轭复根的形式出现,且呈现负实部先逐渐远离零点而后靠近零点、正虚部逐渐增大的变化特点;在kp1≤0.25 时,λ4、λ5以共轭复根的形式出现;当kp1≥0.4 时,λ3、λ4以共轭复根的形式出现;λ5为负实根并且靠近零点,最终稳定在-6.0。
如图6 所示,kp2取值范围为[0.05, 100]时,系统小干扰稳定线性化状态矩阵A 所有特征值均位于s 平面左半部分,且随着kp2控制参数增大特征值的总体变化趋势为:λ1、λ2、λ3、λ4、λ5特征值的变化与图5 中的变化趋势相同;λ6和λ8均为负实特征值,λ6逐渐靠近零点,λ8先靠近零点后远离零点。

图6 控制参数kp2 改变时主要特征值的根轨迹Fig. 6 Root locus of main eigenvalues when the control parameter kp2 changes
如图7 所示,ki2取值范围为[0.05, 100]时,系统小干扰稳定线性化状态矩阵A 所有特征值均位于s 平面左半部分,且随着ki2控制参数增大,主要特征值的总体变化趋势为:λ1、λ2与λ3、λ4特征值均以共轭复根的形式出现, 且负实部逐渐向零点靠近,正虚部逐渐减小;λ6、λ8均为负实特征值,λ6逐渐远离零点,λ8远离零点后靠近零点。
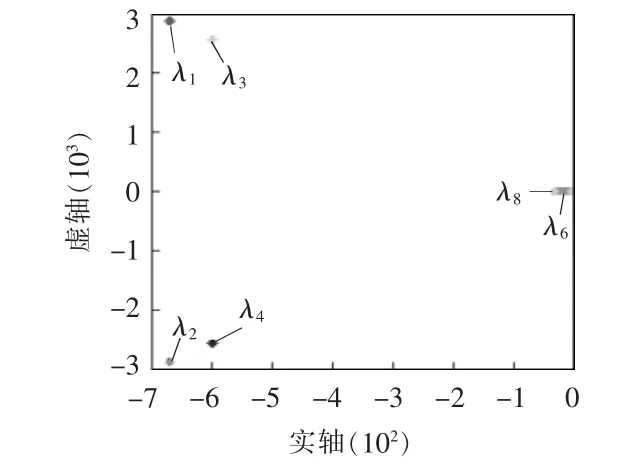
图7 控制参数ki2 改变时主要特征值的根轨迹Fig. 7 Root locus of main eigenvalues when the control parameter ki2 changes
如图8 所示,kp3取值范围为[0.05, 100]时,系统小干扰稳定线性化状态矩阵A 所有特征值均位于s 平面左半部分,且随着kp3控制参数增大,主要特征值总体变化趋势为:kp3取值[0.05, 99.8]时,λ1、λ2以共轭复根形式出现,且呈现出负实部逐渐远离零点、正虚部逐渐增大的变化特点;kp3取值[99.8, 100]时,λ1、λ2分别为负实根,λ3、λ4特征值以共轭复根形式出现且呈现负实部逐渐远离零点,正虚部逐渐增大的变化特点;kp3取值[0.9, 100]时、λ5与λ6以共轭复根形式出现,且呈现负实部不变、正虚部逐渐减小的变化特点;kp3取值[0.2, 0.9]时,λ6与λ7以共轭复根形式出现,且呈现负实部靠近零点,正虚部逐渐减小的变化特点;kp3取值[0.9, 100]时,λ7为负实根并逐渐靠近零点。
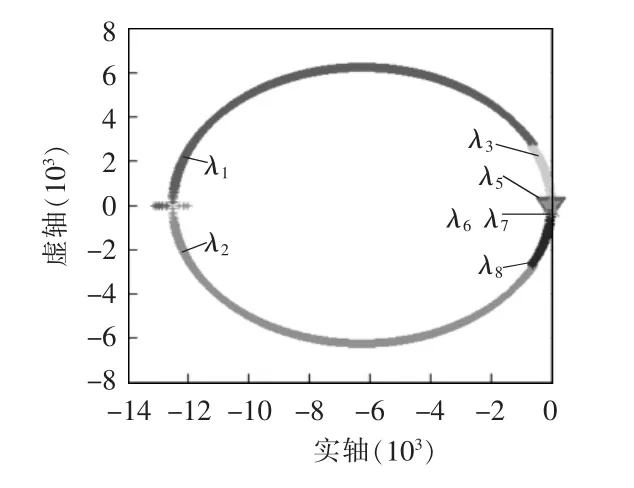
图8 控制参数kp3 改变时主要特征值的根轨迹Fig. 8 Root locus of main eigenvalues when the control parameter kp3 changes
如图9 所示,ki3取值范围为[0.05, 100]时,系统小干扰稳定线性化状态矩阵A 所有特征值均位于s 平面左半部分,且随着ki3控制参数增大主要特征值总体变化趋势为:λ1、λ2与λ3、λ4特征值均以共轭复根形式出现, 且呈现负实部逐渐向零点靠近、正虚部逐渐增大的变化特点;ki3取值[0.05, 6.7] 时,λ5与λ6以共轭复根形式出现,且呈现负实部不变、正虚部逐渐增大的变化特点;ki3取值[6.75, 30.4]时,λ6与λ7以共轭复根形式出现,且呈现负实部不变、正虚部逐渐增大的变化特点;ki3取其他值时,λ5、λ6、λ7特征值均为负实数,且随ki3增加而远离零点。

图9 控制参数ki3 改变时主要特征值的根轨迹Fig. 9 Root locus of main eigenvalues when the control parameter ki3 changes
如图10 所示,kp4取值范围为[0.05,100]时,系统小干扰稳定线性化状态矩阵A 所有特征值均位于s 平面左半部分,且随着kp4控制参数增大,主要特征值总体变化趋势为:λ1、λ2、λ3、λ4特征值变化与图9 中的变化趋势相同。kp4取值[0.6, 6.85]时,λ5与λ6以共轭复根形式出现,且呈现负实部减小,正虚部逐渐减小的变化特点;kp4取值[6.9, 100]时,λ7与λ8以共轭复根形式出现,且呈现负实部不变,正虚部逐渐减小的变化特点。kp4取其他值时,λ5与λ6为负实数根并且保持不变,λ7与λ8负实数根并且逐渐靠近零点。
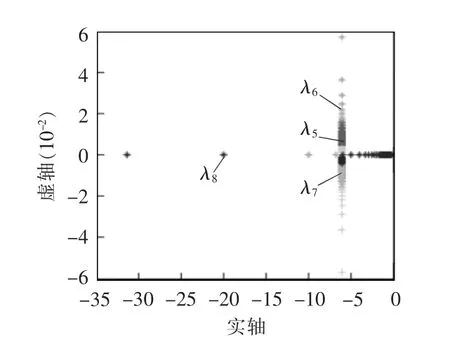
图10 控制参数kp4 改变时主要特征值的根轨迹Fig. 10 Root locus of main eigenvalues when the control parameter kp4 changes
如图11 所示,ki4取值范围为[0.05, 100]时,系统小干扰稳定线性化状态矩阵A 所有特征值均位于s 平面左半部分, 且随着ki4控制参数增大主要特征值总体变化趋势为:λ1、λ2与λ3、λ4特征值均以共轭复根形式出现, 且呈现负实部逐渐向零点靠近,正虚部逐渐增大的变化特点;ki4取值[0.05, 0.6]时,λ7与λ8以共轭复根形式出现,且呈现负实部不变、 正虚部逐渐减小的变化特点;ki4取值[0.65, 6]时,λ5与λ6以共轭复根形式出现,且呈现负实部不变、 正虚部逐渐增大的变化特点;ki4取值[6.05,30.45]时,λ6与λ7以共轭复根形式出现,且呈现负实部增大、 正虚部先逐渐增大后减小的特点;ki4取其他值时,λ5、λ6、λ7、λ8为负实数根,λ5不变,λ6、λ8远离零点,λ7靠近零点。
图12 中,mp取值范围为[0.000 000 1, 0.005]时,系统小干扰稳定线性化状态矩阵A 所有特征值均位于s 平面左半部分,且随着mp控制参数增大,主要特征值总体变化趋势为:mp取值[0.000 000 1,0.000 187 8]时,λ5与λ6以共轭复根形式出现,且呈现负实部不变、 正虚部逐渐增大的特点;mp取值[0.000 187 9, 0.000 948 9] 时,λ7与λ8以共轭复根形式出现,且呈现:负实部远离零点,正虚部先逐渐增大后逐渐变小的特点;mp取其他数值时,λ5、λ6、λ7、λ8为负实部,且λ5靠近零点,λ6不变、λ7远离零点,λ8靠近零点。

图11 控制参数ki4 改变时主要特征值的根轨迹Fig. 11 Root locus of main eigenvalues when the control parameter ki4 changes

图12 控制参数mp 改变时主要特征值的根轨迹Fig. 12 Root locus of main eigenvalues when the control parameter mp changes
图13 中,nq取值范围为[0.000 000 01, 0.001]时,系统小干扰稳定线性化状态矩阵A 所有特征值均位于s 平面左半部分,且随着nq控制参数增大主要特征值总体变化趋势为:nq取值[0.000 000 01,0.000 209 38]时,λ5与λ6以共轭复根形式出现,且呈现负实部和正虚部均不变的特点。 λ7为负实数根,靠近零点。 nq取值[0.000 209 39, 0.001]时,λ6与λ7以共轭复根形式出现, 且呈现负实部远离零点、正虚部不变的特点,λ5为负实部,靠近零点。
如图14 所示,Cf取值范围为[0.000 001,0.05]时,系统小干扰稳定线性化状态矩阵A 所有特征值均位于s 平面左半部分,且随着Cf参数增大主要特征值总体变化趋势为:λ1、λ2共轭复根变化趋势为:负实部远离零点,正虚部逐渐减小;λ3、λ4共轭复根变化趋势为:负实部靠近零点,正虚部逐渐减小;λ5、λ6共轭复根变化趋势为:负实部远离零点,正虚部逐渐增加。
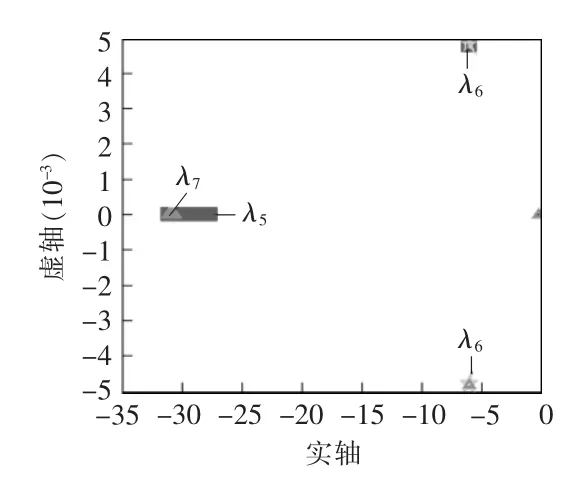
图13 控制参数nq 改变时主要特征值的根轨迹Fig. 13 Root locus of main eigenvalues when the control parameter nq changes
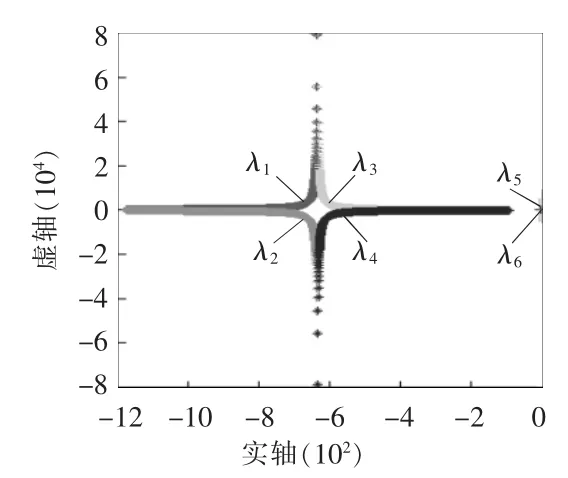
图14 滤波电容Cf 改变时主要特征值的根轨迹Fig. 14 Root locus of main eigenvalues when the control parameter Cf changes
如图15 所示,Lf取值范围为[0.000 01, 0.05]时,系统小干扰稳定线性化状态矩阵A 所有特征值均位于s 平面左半部分,且随着Lf参数增大,主要特征值总体变化趋势为:λ1、λ2共轭特征值变化趋势为:负实部靠近零点,正虚部先逐渐增大后逐渐减小;λ3、λ4共轭特征值变化趋势为:负实部和正虚部均先远离零点后靠近零点(如图15(a)所示);λ5、λ6共轭特征值的变化趋势为:负实部不变,正虚部减小,减小到一定程度后λ5、λ6由共轭复根分别变为负实数根;而后,λ5、λ6由负实根再次变为负实部不变、虚部逐渐增加的共轭复根(如图15(b)所示)。
由上述基于DC 模式的独立微电网系统小干扰稳定线性化状态矩阵A 主要特征值的变化轨迹分析,可确定系统各参数的初步优化结果。 控制参数初步优化结果确定是根据控制参数改变过程中特征值变化较为明显的点而初步选择的一组合适控制参数。基于DC 模式的独立微电网系统各参数初 步 优 化 结 果 为:kp1=0.4,ki1=80,kp2=0.4,ki2=80,kp3=2.5,ki3=30.4,kp4=2.5,ki4=30.4,mp=5×106,nq=5×10-7,Lf=4×10-3,Cf=8×10-4。 其参数优化后的特征值分布如表3 和图16 所示。
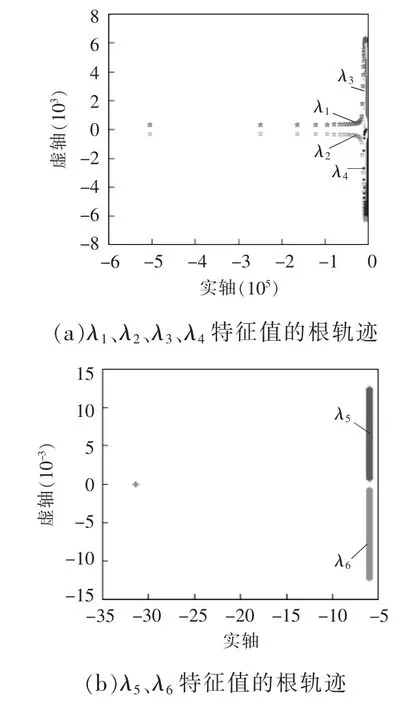
图15 滤波电容Lf 改变时主要特征值的根轨迹Fig. 15 Root locus of main eigenvalues when the control parameter Lf changes

表3 系统各参数初步优化后状态矩阵特征值分布Tab. 3 Eigenvalue distribution of state matrix after preliminary optimization of system parameters
对比表2、表3 及图4、图16 独立微电网系统各参数优化前后的状态矩阵特征值分布及阻尼比变化可知,与各参数优化前的状态矩阵特征值分布相比,通过对系统各参数进行根轨迹分析得到的各个参数的初步优化结果可使独立微电网系统小干扰线性化状态矩阵的特征值整体向s 平面左半平面平移,并且初步优化的参数可保证独立微电网系统存在4 个衰减模态和2 个振荡模态,系统运行过程中抵抗小扰动的可靠性明显增强。

图16 系统各参数初步优化后的状态矩阵特征值分布Fig. 16 Eigenvalue distribution of state matrix after preliminary optimization of system parameters
4.3 实验验证
为验证基于DC 模式的独立微电网系统小干扰稳定性理论分析的正确性,设计独立微电网系统的硬件实验, 有关参数的设计和标准要求见表4。基于DC 模式的独立微电网系统基本硬件结构如图17 所示。
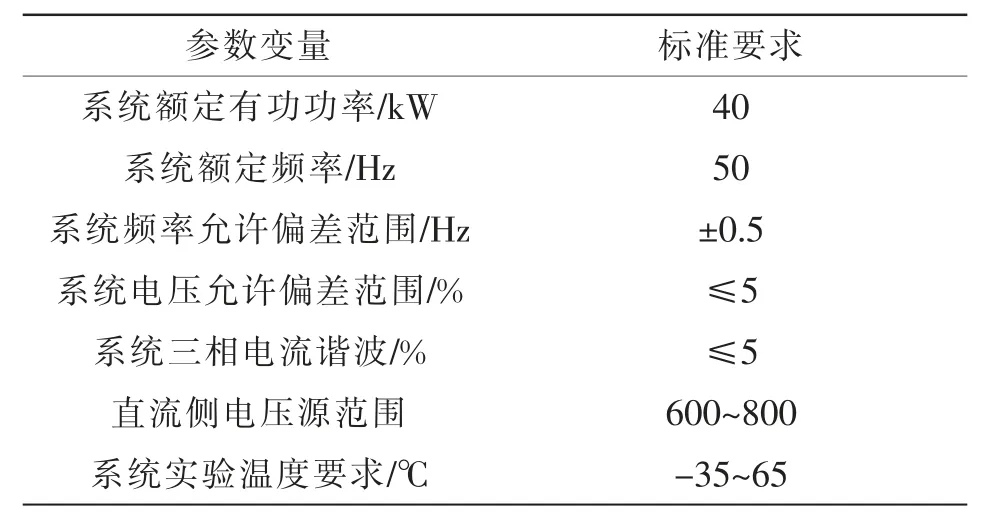
表4 相关参数和标准Tab. 4 Relevant parameters and standards
根据实验现有的平台,使用2 台20 kW 的三相逆变器,其交流侧输出额定电压为380 V,允许输出的最大电流为50 A, 两台逆变器的交流汇接在一起,形成交流母线;负载使用可以调节阻值的电阻箱,在负载和变压器间有一个接触器用于投切负载;直流侧各使用了一个50 kW 的双向恒压源,恒定电压为720 V。独立微电网系统实验平台如图18所示。 在独立微电网系统中负载设置为40 kW 时,分别根据表1 和表3 控制参数优化前后的数据进行如图1 所示的独立微电网系统实验,实验波形及分析过程如下。
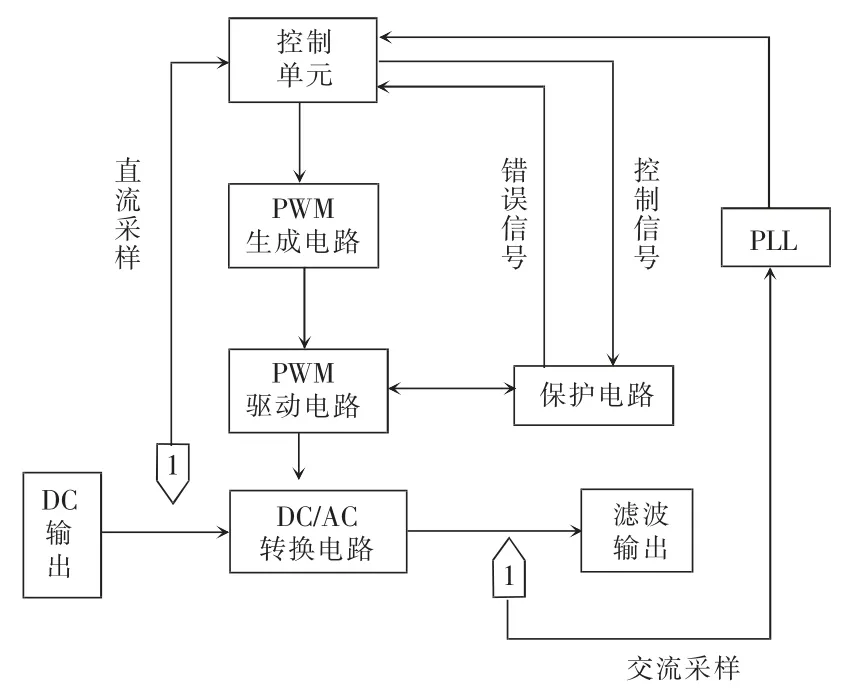
图17 独立微电网系统基本硬件结构Fig. 17 Basic hardware architecture of independent microgrid system

图18 独立微电网系统实验平台Fig. 18 Experimental platform of independent microgrid system
4.3.1 独立微电网系统控制参数优化前的实验分析
按照表1 中提供的控制参数进行独立微电网系统实验平台的搭建,实验结果如图19 所示。如图19(a)所示,独立微电网系统在空载情况下,输出相电压为220.8 V,频率为50.06 Hz,两个机器的输出电流分别为4.76 A 和4.66 A;如图19(b)所示,独立微电网系统由空载状态下突然投入40 kW 负载时,电压振荡,电流纹波变大,频率波动较大,说明该组控制参数需要进一步优化。
4.3.2 独立微电网系统控制参数优化后的实验分析

图19 控制参数优化前独立微电网系统的实验波形Fig. 19 Experimental waveforms of independent microgrid system before the optimization of control parameters

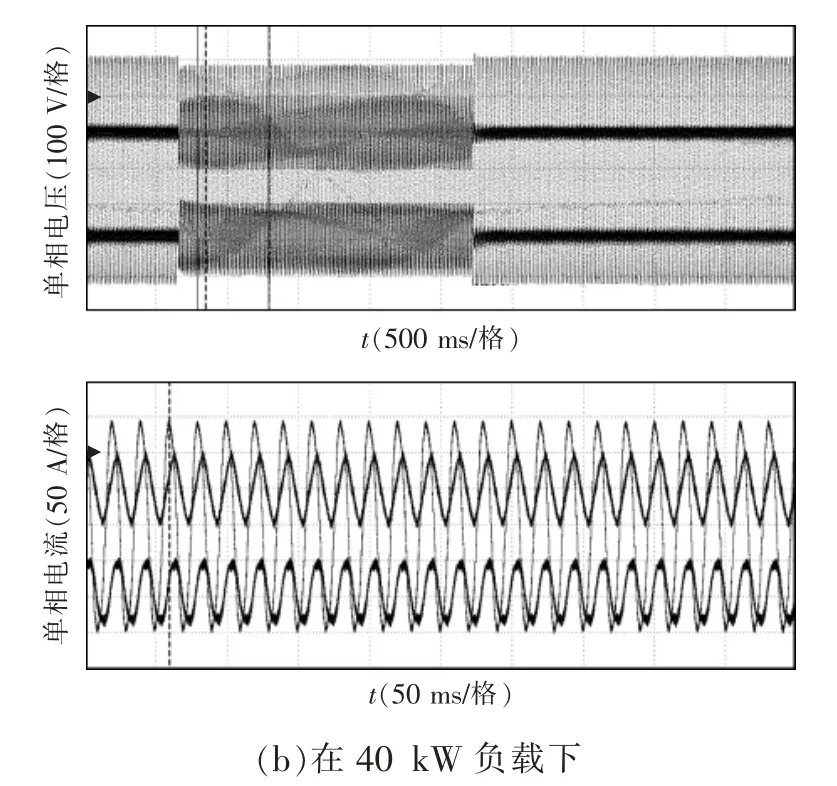
图20 控制参数优化后独立微电网系统的实验波形Fig. 20 Experimental waveforms of independent microgrid system with optimized control parameters
按照表3 中提供的控制参数进行独立微电网系统实验平台的搭建,实验结果如图20 所示。如图 20(a)所示,独立微电网系统在空载情况下,输出相电压为221.1 V,频率为50.06 Hz,两个机器的输出电流分别为4.76 A 和4.65 A。 如图20(b)所示,独立微电网系统由空载状态下突然投入40 kW 负载时,电压不会振荡,电流纹波很小,控制效果比较好,符合相关设计的要求。
5 结论
针对独立微电网系统的运行稳定性问题,本文以李雅普若夫判据和特征值分析法为基础,对基于DC 模式的独立微电网系统小干扰稳定性问题展开深入的分析和研究,主要结论如下:
(1)对基于DC 模式的独立微电网系统进行数学建模,并基于线性化理论对所建立系统的数学模型进行小扰动线性化处理,得到独立微电网系统的小扰动线性化状态矩阵;
(2)基于李雅普若夫判据理论,对独立微电网系统的小扰动线性化状态矩阵特征值进行分析,并逐一改变系统各参数的取值范围,得到状态矩阵中主要特征值变化的根轨迹;
(3)根据状态矩阵中主要特征值的根轨迹及各参数的取值范围,对各参数进行初步优化,并将初步优化前后的系统状态矩阵特征值分布情况进行对比,理论分析及实验验证表明控制参数初步优化后的系统在运行过程中波动性较小、运行可靠性增强。
然而,本文还存在需要改进的地方,例如,在独立微电网系统的小扰动线性化状态矩阵的特征值分析过程中,如何建立特征值变化约束条件并提出智能算法解决控制参数的最优化取值问题。
猜你喜欢
中等数学(2020年2期)2020-08-24
力学学报(2020年4期)2020-08-11
数理化解题研究(2020年13期)2020-05-07
数学物理学报(2019年5期)2019-11-29
测控技术(2018年9期)2018-11-25
科学与财富(2017年15期)2017-06-03
黑龙江电力(2017年1期)2017-05-17
科技创新与应用(2017年1期)2017-05-11
北京航空航天大学学报(2016年7期)2016-11-16
光学精密工程(2016年3期)2016-11-07