基于模糊和预补偿的多电机控制系统的研究
2021-04-13 03:23任志玲刘子洋
电源学报 2021年2期
任志玲,刘子洋
(辽宁工程技术大学电气与控制工程学院,葫芦岛125105)
随着工业制造技术的不断发展,在轧钢、印刷和纺织等行业,多电机控制系统得到越来越广泛的应用。多电机协同控制系统性能的好坏直接影响运行的可靠性和产品的质量[1,2]。 目前,由多台电机构成的传动系统已经发展出多种不同形式的结构,根据电机间是否存在耦合关系,将其划分为非耦合控制和耦合控制两大类。其中非耦合控制包括主令控制和主从控制等; 耦合控制包括并联交叉耦合控制、相邻交叉耦合控制以及偏差耦合控制等[3]。采用非耦合控制方式的优点是结构简单易实现,但缺点是电机间没有耦合规律进行补偿, 导致同步性能差,抗扰性能不够理想[4];为了形成速度控制闭环以提高同步控制精度,Korean[5]提出并联交叉耦合结构,其主要特点是将2 台电机的转速作差,将得到的偏差作为附加的反馈信号, 对转速差进行补偿,从而获得良好的同步控制精度,这种控制策略比较适用于2 台电机的控制, 随着电机数量的增多,其控制算法的复杂程度将大大增加;Perez-Pinal 等[6]提出适用于多电机的偏差耦合结构,其控制性能有了很大改善;文献[7]将偏差耦合结构进行简化,运用相邻交叉耦合控制,降低了系统的复杂程度[8],但当某台电机遇到负载波动时,补偿量只能沿着相邻电机逐步传导, 导致补偿对系统有一定的延迟;文献[9-10]采用固定增益速度补偿器实现偏差耦合控制,该算法虽然简单,但因其补偿器只考虑了转动惯量对同步性能的影响, 而没有考虑如摩擦因数、磁链等其它本体参数导致速度不同步的因素,所以同步精度有待进一步提高。在综合考虑简化计算和同步精度的基础上,提出基于模糊补偿和预补偿的偏差耦合控制结构,为了进一步提高补偿机构对偏差进行补偿的速度,提出了一种速度预补偿函数。
尽管模糊补偿器可以削弱扰动造成的不利影响,但同时也会使未受扰动影响的电机转速产生波动,导致对指令信号的跟踪性能变差。 以往研究只针对同步补偿规律进行改进,而没有考虑电机跟踪性能的提高。 仿真实验表明,提高跟踪控制器的性能对多电机同步的抗扰性和同步精度有很大提高,为此,设计了一款带有负载前馈功能的滑模控制器SMC(sliding mode controller)。
1 偏差耦合固定增益补偿结构
1.1 同步误差及跟踪误差的定义
永磁同步电机PMSM(permanent magnet synchronous motor)具有体积小、重量轻、结构简单、效率高和损耗小等优点,非常适合应用于数量较多的电机系统。本文以一个包含n 台PMSM 的系统为对象展开研究。 各台电机的运行速度关系为ω1∶ω2∶…∶ωn=λ1∶λ2∶…∶λn,其中λi为电机间速度比值。 定义第i 台电机的跟踪误差为

式中:ω*i(t)为第i 台电机的指令速度;ωi(t)为第i台电机的实际响应速度。 定义第i 轴与第j 轴的同步误差为

式中,ωi和ωj分别为第i 和j 轴的实际响应速度。
当λ1、λ2、…、λn至少有一个不为1 时,称这种运行方式为比例同步方式;当λ1、λ2、…、λn都为1时,称这种运行方式为完全同步运行方式。 本文是基于各轴的角速度比例系数λi=1(i=1,2,…,n),也就是完全同步的基础上展开研究的,那么各轴的指令速度ω*1(t)=ω*2(t)=…=ω*n(t)=ω*(t)。为了保证多电机系统的实际应用价值,要求各台电机的跟踪误差在尽可能短的时间内稳定收敛,即

同时要求电机各轴同步误差也能够在尽可能短的时间内达到稳定并收敛,即

基于上述对跟踪误差和同步误差的定义,n 台电机的控制问题可以描述为:设计同步补偿器以及跟踪控制器,使同步误差和跟踪误差在尽可能短的时间内稳定且收敛于0。
1.2 多电机系统同步补偿结构
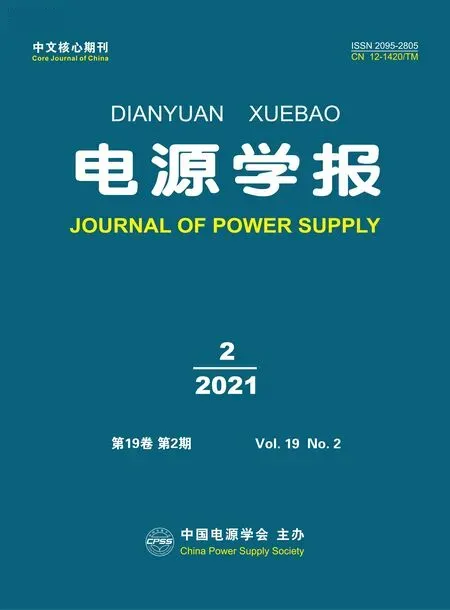
以3 台电机为例,偏差耦合固定增益补偿系统中的同步速度补偿模块1 如图1 所示。
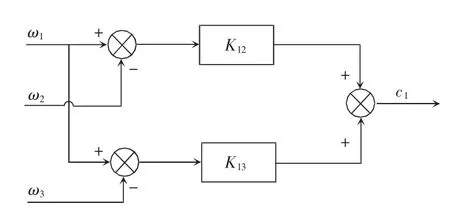
图1 偏差耦合固定增益补偿模块1Fig. 1 Deviation coupling fixed-gain compensation module 1
偏差耦合控制的速度补偿信号是由一台电机与其他电机速度反馈的差值乘以相应的耦合增益后再相加得到的。各个速度补偿器的耦合增益通过相应电机之间的转动惯量求得。图1 中的K12和K13为速度反馈耦合增益。 第i 补偿模块的增益[11]Kij为

式中:Ji为第i 台电机的转动惯量;Jj(j=1,2,…,n,且j≠i)为其余电机的转动惯量。
由图1 可得同步补偿模块1 的速度补偿值为

然后将补偿量c1补偿到电流环。
固定增益补偿器的耦合规律只考虑了电机转动惯量的差异,考量因素较少,因此设计比较粗糙且补偿效果不理想。 为此,本文将固定补偿增益Kij替换为综合考虑各种电机参数差异和负载扰动的模糊补偿器。
2 模糊补偿和预补偿
2.1 模糊补偿器的设计
设e 和ec 分别表示语言变量 “同步误差”和“同步误差变化率”。 仿真过程中,将电机指令速度设置为额定转速1 500 r/min, 在0.3 s 时突加19.1 N·m 的额定转矩。模糊逻辑是用语言变量来表示不确定概念[12]。 在整定模糊同步补偿器参数的过程中,用示波器测量εij、及补偿量u,当补偿效果达到最优时,选取多次测量结果的最大值即可确定同步误差及补偿量的基本论域,保证此时的模糊同步补偿器能够对加额定负载且具有参数差异的3 台电机有较好的综合补偿效果。由于误差变化率是由同步误差经过求导得到的, 必须经过Saturation 饱和函数适当限幅后提高模糊函数对基本论域的利用率,确定其基本论域为[-2 500,+2 500]。 同步误差的基本论域为[-2.7,+2.7],输出补偿的基本论域为[-40,+40]。 选取电机i 与电机j 的速度偏差E 及其变化率EC 作为模糊控制器的输入语言变量模糊集合,补偿量U 为其输出语言变量模糊集合。
E、EC 和U 的离散化论域分别为
E={-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}
EC={-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}
U={-3,-2,-1,0,1,2,3}
误差及误差变化率的量化因子分别为

补偿量的比例因子为

E、EC 和U 的语言值集合分别为
E={PB,PM,PS,PO,NO,NS,NM,NB}
EC={PB,PM,PS,PO,NO,NS,NM,NB}
U={PB,PM,PS,PO,NO,NS,NM,NB}
根据操作经验来确定隶属度函数和控制规则。综合考虑计算量和准确性, 选用如图2~图4 所示的三角形隶属度函数。

图2 E 的隶属度函数Fig. 2 Membership function of E

图3 EC 的隶属度函数Fig. 3 Membership function of EC
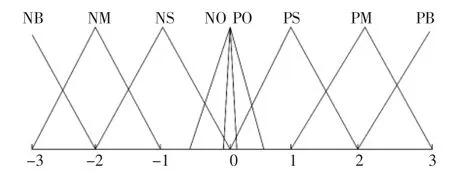
图4 U 的隶属度函数Fig. 4 Membership function of U
模糊控制规则是模糊控制的核心,而控制规则设计的质量直接影响补偿器的性能。通过总结操作经验,如:由“若电机i 与j 的同步误差大,且有快速增大的趋势,那么通过输出很大的补偿量,来减小电机间同步误差”来写出“If E is PB and EC is PB,then U is NB.”等一系列模糊语句。具体模糊控制规则见表1。
2.2 预补偿函数
为了提高电机间的同步响应速度,引入一个速度预补偿函数

表1 模糊控制规则Tab. 1 Fuzzy control rules
预补偿函数与系统中每台电机的速度相关,速度补偿器首先计算出系统的平均速度,如果电机2突遇较大负载,使得ω2<ω1且ω2<ω3,那么,ω3>,得,Δ2>0,Δ3<0。 将补偿量Δi加到各自的同步补偿器中,便可加快削弱电机间的同步速度误差,使各台电机同步响应快于单一模糊同步补偿的速度。 以此类推,在各台电机速度相差较大时, 能够给速度慢于平均速度的电机正补偿量,使其加快速度; 给速度快于平均速度的电机负补偿量,使其降低速度。当3 台电机转速相同时,预补偿函数便不再起作用。基于模糊和预补偿函数的整体同步补偿模式结构1 如图5 所示。

图5 模糊和预补偿模块1Fig. 5 Fuzzy and pre-compensation module 1
由图5 可知,模糊和预补偿模块的综合补偿值为

式中,fuzzy(ωi-ωj)为变量ωi-ωj的模糊补偿函数。此时的偏差耦合将各台电机之间的同步误差通过模糊、预补偿函数将得到的补偿量补偿到采用软连接方式的各台电机。 当各台电机出现不同步时,补偿量会加入到直轴电流id=0 的矢量控制电流环,通过调节电流环iq的大小来使电机加速或减速;而当各台电机保持同步时,同步补偿模块输出为0,即不再进行补偿。
3 跟踪误差及同步误差精度的提高
3.1 跟踪误差控制器
由于同步能力与跟踪能力存在一定的正比关系,故改变以往多电机研究只在同步补偿规律方面提升性能的局限,并采用提高跟踪控制性能来改善同步性能的思想,设计1 款带有负载前馈的滑模跟踪误差控制器以增强系统鲁棒性。多电机控制系统整体结构如图6 所示。

图6 改进型偏差耦合多电机控制系统结构Fig. 6 Structure of improved deviation coupling multi-motor control system
本文是基于表贴式PMSM 的多电机系统,因而有Ldi=Lqi, 其中,Ldi和Lqi分别为第i 台电机定子绕组的d 轴和q 轴分量, 所以电磁转矩可简化为

式中:Tei为第i 台电机的电磁转矩;npi为第i 台电机的极对数;ψfi为第i 台电机一相定子绕组中永磁磁链的幅值;iqi为第i 台电机q 轴绕组的电流。 为了更加接近真实工况,在考虑PMSM 的摩擦系数υ的情况下,运动方程为

式中:Ji为第i 台电机的机械负载系统折算到电动机轴端的转动惯量;ωi为第i 台电机的机械角速度;Tli为折算到第i 台电动机轴端的负载转矩。对n台电机控制系统,设PMSM 的状态变量为
式中,ω*为第i 台电机的指令速度。
滑模变结构具有动态响应快和鲁棒性强等特点,故采用滑模变结构来构成跟踪控制器的主体[13]。取一阶滑模面

仿真实验中取常数c=20。 为削弱抖振的影响,并缩减到达稳定点的时间,采用的变指数趋近律为

式中:ε|x|a为系统的运动点趋近切换面的速率;-k|x|bs 为变指数趋近项。
利用Lyapunov 第二方法对系统稳定性进行证明。 构造一个正定标量函数为

对V 求导得

利用式(18)新型趋近律来设计跟踪控制器,取a=2,b=2;为了简化计算,选用x=x1,那么新型趋近律为

得系统控制律为

3.2 观测器的设计
为了提高系统的抗扰性能,设计负载观测器并前馈至跟踪控制器中, 将负载转矩作为未知变量反馈到跟踪控制器中。 当负载出现波动时,跟踪控制器能及时响应负载变化。由于控制器采样周期非常短, 因而在每个周期内将负载转矩视为基本不变,即dTli/dt=0。 以电机转速和负载转矩作为观测对象,建立状态方程,即

上述状态方程中,令U=[C CA]T,有rank(U)=2,U 的秩与状态变量个数相等,因而满足完全能观测条件,即在任意初始时刻系统都能够被观测。 建立状态观测方程为

式中:上标“^”表示估计值;H 为反馈增益矩阵,H=[h1h2]T。 设为观测误差,则

其特征方程为


由式(25)解得反馈增益矩阵系数为

经过反复调试,取h1=6 000,h2=-7 200,然后将观测到的负载转矩前馈至跟踪控制器。
4 仿真实验与结果分析
为验证本文所提基于同步补偿和跟踪控制联合作用的多电机控制策略,选用3 台永磁同步电机作为仿真模型。 为了使仿真更接近真实,同时也为了检验多电机控制策略的同步与跟踪控制性能,3台电机参数在合理范围内有所不同,主要参数设置如表2 所示。
按照图6 控制结构搭建仿真模型。为了与所提控制策略进行对比,首先搭建固定增益同步补偿模块和PID 跟踪控制器的多电机系统,然后进行仿真参数设置。 设置仿真步长为固定步长0.000 01 s,仿真时间为0.5 s,并在0.3 s 时为电机2 突加19.1 N·m 额定负载, 模拟系统在实际突加额定负载状况时的速度同步和对指令信号的跟踪能力。 仿真结果见图7。
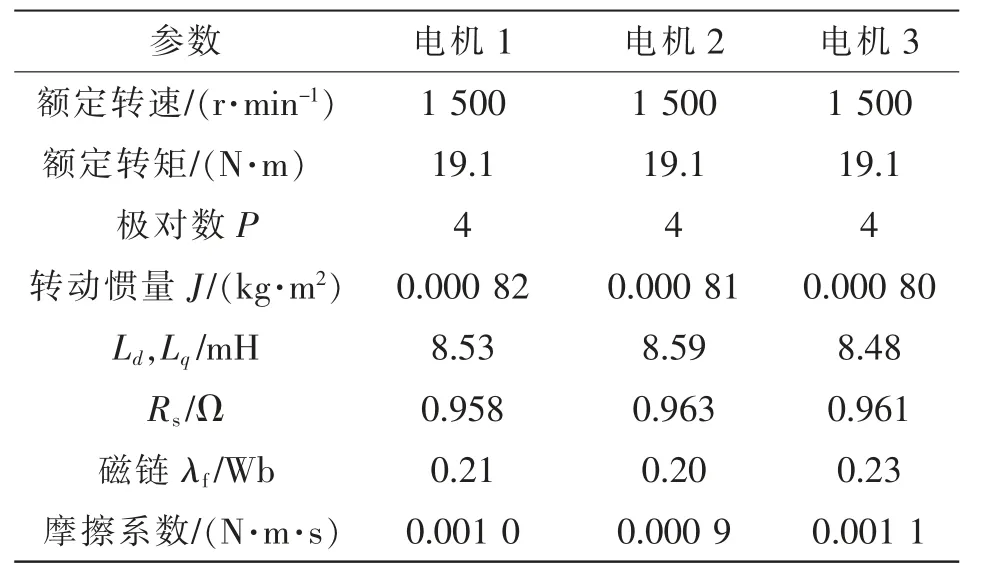
表2 各台电机参数Tab. 2 Parameters of each motor

图7 固定增益补偿器和PID 跟踪控制器仿真结果Fig. 7 Simulation results with fixed-gain compensator and PID tracking controller
由图7 可知,当电机2 突加负载时,电机间由于设置有固定补偿增益,会减小电机2 的速度下降值。 但电机1、3 与电机2 的同步效果并不好,经过比较长时间各台电机的速度才能基本同步和达到额定转速。
为验证模糊补偿器的补偿效果并为检验预补偿函数做准备,搭建模糊补偿结构和PID 跟踪控制器,仿真参数设置同上,仿真结果见图8。

图8 模糊同步补偿器和PID 跟踪控制器仿真结果Fig. 8 Simulation results with fuzzy synchronous compensator and PID tracking controller
与图7 相比可以看出,图8 中,电机突加负载,各台电机基本保持同步,并且在0.35 s 时基本恢复额定转速,模糊补偿器起到了比较好的效果。
搭建模糊和预补偿同步误差补偿器及PID 跟踪误差控制器,仿真参数同上,仿真结果见图9。
对比图9 与图8 可以看出,没有预补偿函数的电机在0.35 s 基本恢复额定转速;而带有预补偿函数的补偿结构使系统在0.34 s 就恢复额定转速,并且转速曲线更加圆滑。
为验证提高跟踪误差控制器的性能可增强系统鲁棒性, 搭建固定增益补偿结构和负载前馈型SMC 系统,仿真参数设置同上。 由图10 可以看出,电机2 在0.3 s 时加上额定负载转矩, 其转速下降了50 r/min,相对于图7 的PID 控制器转速下降的175 r/min 有明显改善,而且各台电机经过很短时间就恢复到指令速度。电机系统的鲁棒性得到了明显增强,但由于同步补偿结构的原因,同步效果并不理想。
最后,以模糊、预补偿和负载前馈型SMC 为模型进行仿真,验证了所提同步补偿和跟踪控制联合作用思想的正确性。如图11 所示,当电机2 在0.3 s受到额定负载的扰动时, 相对于前面几种情况,电机间的同步性能以及最大下降速度都得到了改善。

图9 模糊补偿和预补偿结构及PID 同步补偿器仿真结果Fig. 9 Simulation results with fuzzy compensation and pre-compensation structure and PID synchronous compensator
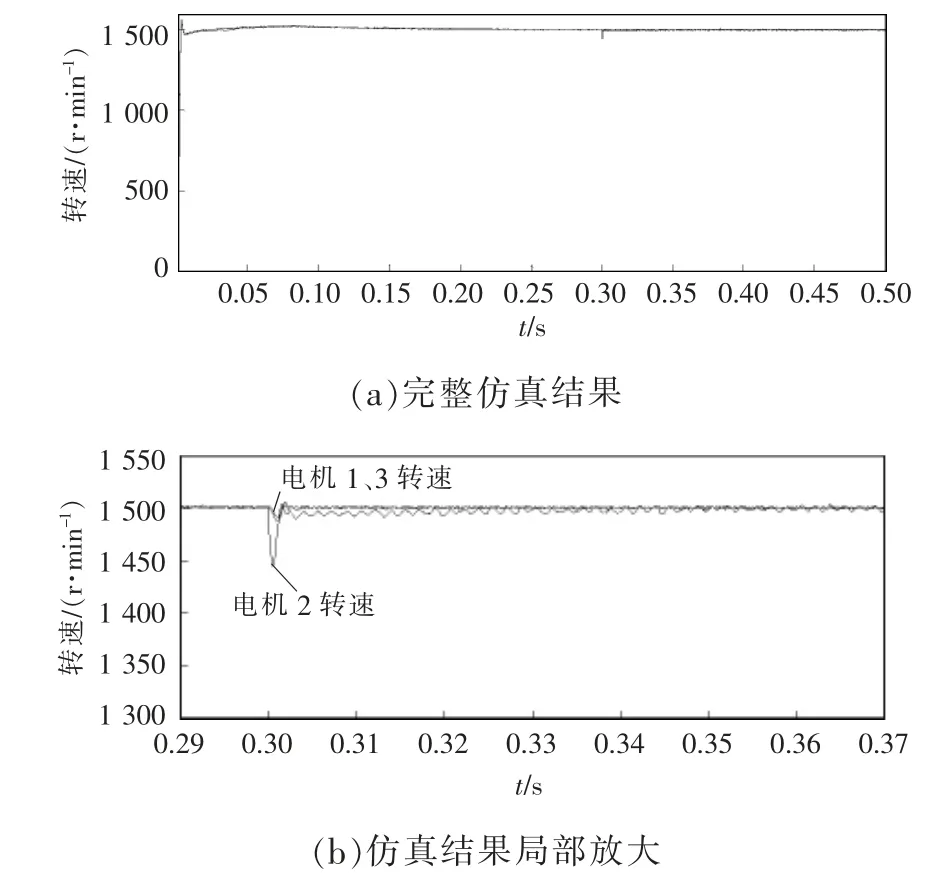
图10 固定增益补偿和负载前馈SMC 跟踪控制仿真结果Fig. 10 Simulation results with fixed-gain compensation and load feedforward SMC tracking control
为进一步检验算法的稳定性,模拟实际传送一个物体过程中加负载和减负载的复杂工况,搭建固定补偿增益和PID 跟踪控制器。 电机1 在0.2 s 时加19.1 N·m 的额定负载,经过0.1 s 物体到达电机2, 再过0.1 s 3 台电机同时承受19.1 N·m 额定负载,至0.4 s 时,电机1、2 和3 依次卸负载,模拟物体被传送至别处。 仿真曲线如图12 所示。

图11 模糊、预补偿和负载前馈型SMC 控制器仿真结果Fig. 11 Simulation results with fuzzy, pre-compensation and load feedforward SMC controllers

图12 固定补偿增益和PID 控制器模拟传送物体仿真曲线Fig. 12 Simulation curves with fixed compensation gain and PID controller to simulate the transfer of objects
将上述补偿结构和跟踪控制结构改为模糊、预补偿结构和负载前馈型SMC, 模拟工况与图12 相同,仿真结果如图13 所示。可以看出改进型系统模拟复杂工况的最大速降、鲁棒性和同步效果等都要优于固定增益偏差耦合和PID 跟踪控制器,验证了本算法的正确性。
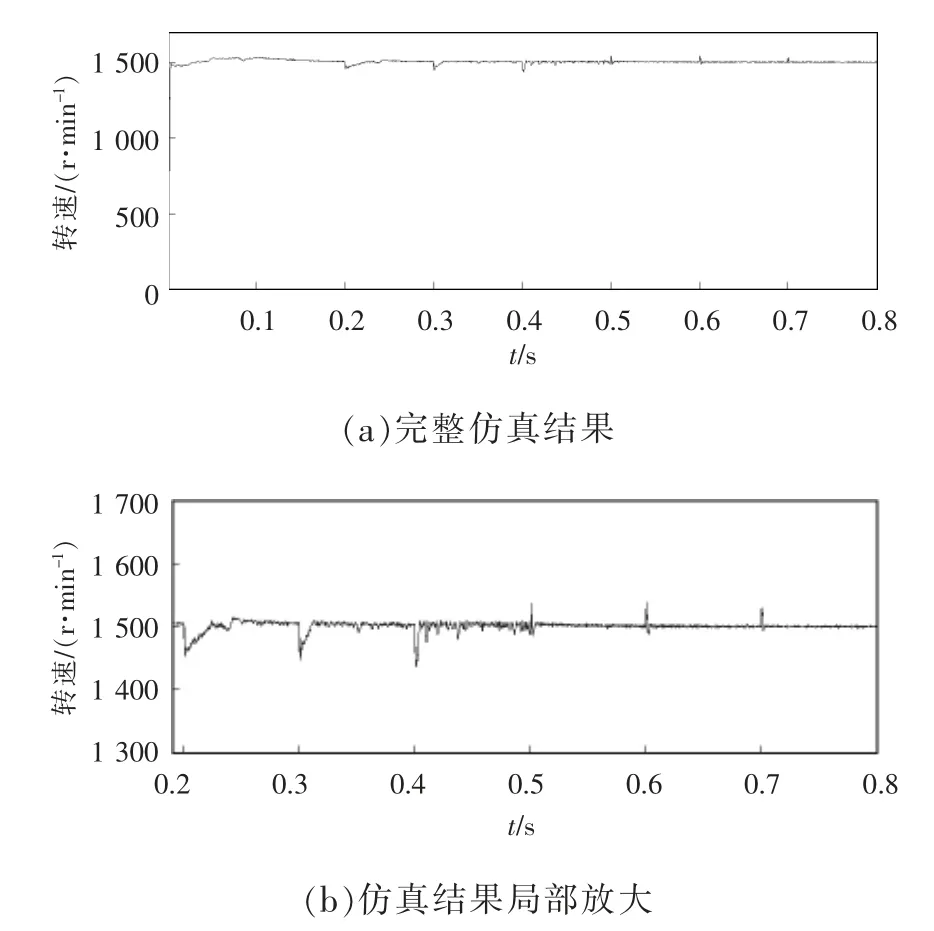
图13 改进补偿结构和改进跟踪控制器模拟传带仿真结果Fig. 13 Simulation results with improved compensation structure and improved tracking controller to simulate conveyors
5 结语
本文针对多电机耦合规律补偿效果不理想及没有考虑提高跟踪性能等缺点,提出了基于同步补偿和跟踪控制联合作用的控制策略。突破了以往研究只在速度同步补偿方面创新的局限性,验证了提高跟踪误差控制器性能对增强系统鲁棒性和同步性能都有很大改善的正确性。 同时,提出模糊同步误差补偿器, 改善了以往补偿效果不理想的问题;为了提高补偿速度,提出一种预补偿函数,在仿真实验中,可以看出其对减少到达同步的时间及指令跟踪的时间有明显作用。
猜你喜欢
湖南电力(2021年4期)2021-11-05
北京航空航天大学学报(2021年6期)2021-07-20
学生天地(2020年6期)2020-08-25
数学年刊A辑(中文版)(2020年2期)2020-07-25
电子制作(2019年19期)2019-11-23
电子制作(2018年19期)2018-11-14
电子制作(2017年2期)2017-05-17
通信电源技术(2016年1期)2016-04-16
系统医学(2016年8期)2016-02-20
电测与仪表(2014年20期)2014-04-04