
基于改进BB-BC算法的轮毂电机直驱赛车行驶策略优化
2021-04-19 02:14黄天一张幽彤张甲典
汽车工程学报 2021年2期
黄天一,张幽彤,张甲典
(1.北京理工大学 清洁车辆北京市重点实验室,北京 100081;2.振发新能集团有限公司,江苏,无锡 214028)
21世纪以来,新能源汽车正成为汽车技术变革的重要方向,其中,纯电动汽车以其零排放、低噪声等优点而备受青睐。同时,随着电动汽车技术的不断推进,轮毂电机直驱技术开始得到广泛的应用,尤其是各类电动车赛事。
对于轮毂电机直驱赛车,由于省去了电机至驱动轮之间的传动系统,机械效率大大提升;且轮毂电机体积小,整车重量得以降低,有利于提高续驶里程。国内外学者在整车能量管理和行驶策略方向开展了一系列研究。文献[1]研究了影响轮毂电机直驱赛车能耗大小的关键因素,认为定速巡航为最佳的节能驾驶策略。文献[2]依靠所建立的太阳能数据库来估算预期的太阳能功率,并结合实时SOC值制定了赛车能量流在线能量管理策略。文献[3]着眼于对太阳辐射强度的预测,基于机器学习对气象大数据进行分析,但对于大跨度地区的不确定天气,该模型精度有待提高。文献[4]提出了一种基于太阳能辐射强度和目标距离的赛车能量优化方案,但其依赖于大量的外部数据。文献[5]和文献[6]分别根据所建立的功率平衡方程以及电池SOC值来估算赛车的最佳巡航速度,这种方法比较简便,但动态性差。
在众多智能优化方法中,BB-BC算法相比于遗传算法GA、粒子群优化算法PSO等其他算法,在收敛性上有明显优势,但同时也常因候选解缺乏多样性而陷入局部最优解,导致优化失败[7]。本文以2019世界太阳能车挑战赛(World Solar Challenge,WSC)为背景,对采用光伏电池和普通动力电池为动力源的轮毂电机直驱赛车行驶策略进行了研究。建立了整车能耗优化模型,并进行了模型参数的试验验证;通过引入一维混沌逻辑映射,在传统BB-BC优化算法的基础上形成改进的BB-BC算法,从而对轮毂电机直驱赛车的行驶策略进行优化,以缩短完赛时间。
1 轮毂电机直驱赛车优化模型
1.1 整车参数与模型架构
本文研究对象为双轮毂电机直驱赛车,动力系统主要由光伏电池阵列、最大功率跟随器、动力电池组、轮毂电机及电机控制器组成,系统结构如图1所示。在比赛巡航模式下,由光伏电池阵列和动力电池一同为驱动系统供电。整车参数见表1。

图1 轮毂电机直驱赛车动力系统结构

表1 赛车参数
根据整车动力系统结构,利用Matlab/ Simulink搭建轮毂电机直驱赛车优化模型。该模型是优化算法的仿真基础,主要包括整车模型、负载模型以及WSC赛事的条件参数。优化模型架构如图2所示。
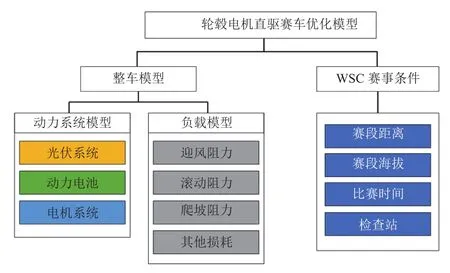
图2 轮毂电机直驱赛车优化模型架构
1.2 光伏电池阵列模型
赛车的光伏电池阵列由串联数为ns,并联数为np的光伏电池组组成,其输出特性可以表示为:

式中:Iph为光电流;Is为反向饱和电流;Isc为光伏电池短路电流;U为电池输出电压;q为电子电荷量,值为1.6×10-19C;n为二极管系数,值为28;K为玻尔兹曼常数,值为1.38×10-23;K1为短路电流温度变化系数;T为电池表面温度;T0为标准测试温度,值为298 K;S为实际光强;S0为标准测试光强。
光伏电池特性参数见表2。
最大功率跟随器(Maximum Power Point Tracking,MPPT)的作用是控制光伏电池两端的输出电压,使其时刻工作在最大功率点上。本文将根据实测的MPPT工作特性,选取合适的MPPT效率值作为建模依据。

表2 SunPower光伏电池技术参数
1.3 动力电池模型
本文在Puekert电池放电公式的基础上,利用电池放电功率代替电池放电电流,电池模型公式为:

式中:C为电池组额定容量;PB为电池组的放电功率;N为Puekert系数,可由试验测得。
基于上式,短时间内T内的电池SOC计算公式为:

式中:SOCint为电池组初始SOC值。
1.4 电机及电机控制器模型
电驱动系统中,采用2个永磁同步轮毂电机,单个电机额定功率为3 kW,利用台架试验获得的轮毂电机系统(电机+电机控制器)效率MAP图作为模型输入。单个轮毂电机系统效率MAP如图3所示。

图3 轮毂电机系统效率MAP
1.5 整车动力学模型
整车驱动力Fr的计算公式为:

式中:A为空气密度;CD为风阻系数;V为车速;A为赛车截面积;Crr为滚阻系数,取值0.005 5;m为整车质量;g为重力加速度,取值9.8 m/s2;θ为道路坡度。
2 BB-BC算法
BB-BC算法,即大爆炸算法(Big Bang-Big Crunch Algorithm)[8]。该算法分为两个阶段——大爆炸(Big Bang)和大坍缩(Big Crunch)。BB过程代表着碎片解在整个搜索空间内随机、无序地被抛出,BC过程则是碎片解因引力收缩至一个唯一的原子解。BB-BC算法在运行过程中将不断地重复这一过程,直至到达算法的结束条件,终止运算。算法表述如下:
对n维连续变量,有目标函数f(x),优化目的是使目标函数取得最小值minf(x),候选解x用一个j维向量表示,其各维度分量其中xmin和xmax分别搜索空间的下界和上界。
2.1 “坍缩”过程
假设第1次迭代时产生了n个碎片解,对第1代碎片解进行“坍缩”,具体求解如下:

式中:xck为在坍缩过程中得到的j维原子解在k维度的坐标分量;xik为碎片解xi在k维度的坐标分量;f(xi)为碎片解xi的目标函数值。
2.2 “爆炸”过程
第2次迭代开始,将以上一代“坍缩”过程求得的原子解为中心进行“爆炸”,其求解方法如下:

式中:r为一个(-1,1)上的随机数;a为收敛因子(0<a<1);t为迭代次数。
为了保证“爆炸”过程中产生的碎片解不超过搜索空间范围,分别设定上、下界xmax和xmin来校正结果。
3 改进的BB-BC算法
作为一种相对较新的群体智能优化算法,BB-BC算法不要求待优化函数连续可导,也不需要待优化函数的梯度信息。在实际运用中,该算法以收敛速度快而著称。
但从BB-BC算法的第2代迭代开始,由于收缩因子a固定,算法“爆炸”产生的碎片解会很容易集中于一小片区域,而BB-BC算法的准确性取决于候选解的多样性。虽然该问题可以通过增加候选碎片解的个数来解决,但该方法对计算机的运算能力有很大要求。所以本文将引入混沌逻辑映射的方法对传统BB-BC算法进行改进。
3.1 一维混沌逻辑映射
混沌状态是一种由确定性方程得到的具有随机性的运动状态,由于其具有随机性、遍历性以及规律性等特点,通常被用于优化算法之中。通过引入与优化变量个数相同的混沌变量,利用混沌系统的遍历性,来改善优化变量的全局搜索能力。
对于本文所研究赛车的全程行驶策略问题,算法中每一代的解即为赛车的巡航速度。由于速度策略是1×n的矩阵,可以利用一维逻辑映射,将混沌状态引入收缩因子at之中。一维逻辑映射的数学表达式为:

式中:·μ为逻辑映射参数,对于区间[0,1]上的at,·μ取值接近4时,逻辑映射将进入混沌状态。此时式(7)改写为:

为了不污染混沌变量,r相应地只取1或-1。
3.2 改进BB-BC算法实现
利用一维逻辑映射后,赛车的全程行驶策略优化算法实现流程如图4所示。

图4 改进BB-BC算法实现流程
4 模型参数试验标定
由于电驱动系统建模已采用试验测得的效率MAP图进行,本文还需要对MPPT效率、电池Puekert系数以及整车能耗进行相关试验标定,以保证模型的准确性。
4.1 MPPT效率特性测试
对MPPT进行不同光照强度下的效率特性测试。由图5可知,MPPT 工作效率与工作时的功率相关,当功率较小或较大时效率低,功率适中时效率高,但总体相差不大,所以本文取MPPT效率为恒定值98%。

图5 MPPT效率特性测试
4.2 电池Puekert系数测定
本车采用NCR18650B锂离子电池,对电池单体进行恒功率放电测试,测试结果如图6所示。测得实际容量3 207 mAh,根据式(6)计算得出该电池的Puekert系数为1.06。
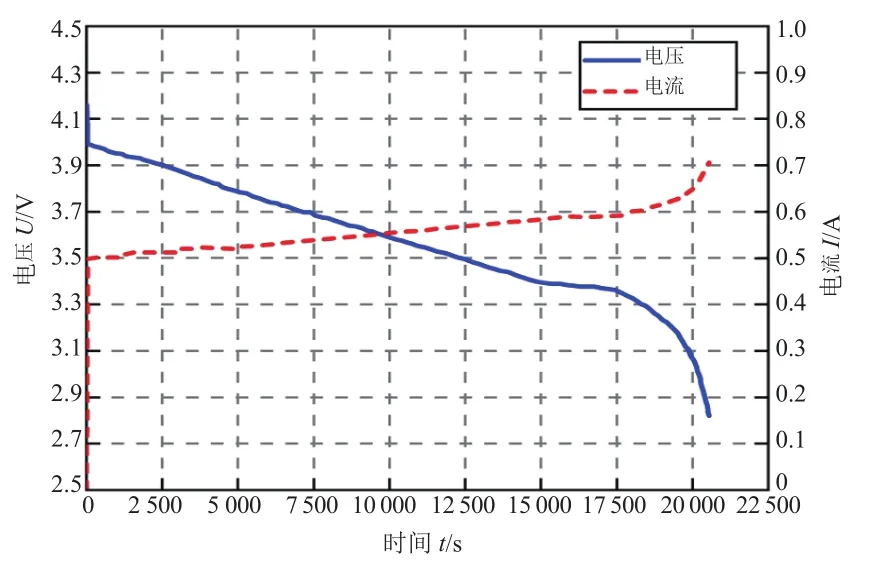
图6 电池单体恒功率放电测试
4.3 整车模型验证
整车能耗测试平台如图7所示,测试系统由德国IMC多通道数字采集仪、电流/电压传感器、无线网桥以及上位机组成。测试过程中整车实时能耗数据由多通道数字采集仪组网后通过无线网桥发送至位于数据采集车辆中的上位机,并由上位机软件进行读取、分析和数据记录。

图7 整车能耗测试平台
由于太阳光照情况变数较大,只在纯电池驱动下进行整车能耗试验,测试0~80 km/h内的整车功率需求,试验结果如下:

图8 整车能耗测试结果对比

图9 实车测试场景
由于实际试验过程中,受侧风、道路粗糙度以及电驱动系统实际工作效率等影响,实测功耗总体上要高于仿真值,尤其是低速区的差值较大。但在实际巡航速度区间仿真曲线与实测值基本一致,模型可以用于策略优化。
5 全程行驶策略优化
5.1 目标函数及约束条件
WSC赛事的比赛成绩依据完赛时间、里程(针对未完成所有赛段的车队)以及除太阳能以外的额外用电量等进行计算,其中完赛时间直接关系到比赛的排名,所以本文行驶策略的优化目标为赛车的总完赛时间,即目标函数为:

式中:T为总完赛时间;ti为完成每一区间所需的时间,比赛共10个区间。
优化过程中有以下约束条件:
(1)对于轮毂电机直驱赛车,其车速搜索空间的下界为60 km/h(根据最晚完赛时间计算),上界为最高设计时速130 km/h。
(2)比赛全程3 021 km,分为3个大赛段,除起点和终点外一共9个检查站,用于强制停车休息,每天规定的比赛时间为8:00~17:00,检查站强制停车时间为30 min。
(3)赛车的电池SOC约束值。
基于以上约束条件,单次模型仿真流程如图10所示。优化过程中,参考速度为仿真模型的唯一输入条件,通过模型计算出的完赛时间反馈至改进的BB-BC算法中,进行下一代速度的生成。优化过程直至达到最大迭代次数为止,最终得到最优的参考巡航速度以及完赛时间。

图10 模型仿真流程
然而,并非所有速度策略都能完赛,因为速度过快会导致动力电池SOC降为0,触发模型停止仿真。因此,仅仅将模型仿真时间作为性能指标是不合理的。在仿真计算时,对此种情况,依据停车地距离终点的距离,设置成比例的、较大量级的罚时,从而使模型优化解符合实际需求。算法的求解设置见表3。

表3 算法优化参数
5.2 全程行驶策略优化结果
5.2.1 全局寻优结果对比
为了说明改进BB-BC算法与BB-BC算法在寻优方面的差别,分别使用两种算法针对赛车完赛时间进行全局寻优仿真,考虑实际计算中的计算机资源及时间成本,选择迭代次数为25次,仿真收敛结果对比如图11所示。可以看出,改进BB-BC算法的收敛速度相对较快,收敛曲线相对平稳,且最终优化结果(全程完赛时间)优于BB-BC算法,为40.16 h。而BB-BC在迭代过程中多次陷入局部最优值,若在前期没有设置较大的迭代次数,很可能导致算法寻优提前终止,从而得不到最佳的行驶策略。

图11 BB-BC算法与改进BB-BC算法仿真结果对比
5.2.2 全程行驶策略优化结果
利用改进BB-BC算法优化后的全赛段行驶策略结果如图12所示。由图可知,优化后的参考速度范围为64~80 km/h,每一区间均对应一个优化速度。其中,在第5区间中参考速度最低,这是因为在该区间赛车将进入整个赛程中海拔最高的路段,道路平均坡度较大,出于能耗的考虑,策略中降低了赛车的行驶速度。

图12 行驶策略优化结果
5.2.3 优化策略与常规策略结果对比
以第二大赛段为例,大多数车队通常采用常规策略,即以一个固定巡航速度行驶。本文中常规策略选择巡航速度为70 km/h。经过模型仿真,优化策略与常规策略结果对比见表4。

表4 优化策略与常规策略结果对比
由表4可知,采用优化策略行驶用时比常规策略缩短7.2%,可直接提高比赛排名和最终的成绩得分。虽然优化策略在到达终点时电池能耗比常规策略略高,但16:30前当地太阳光照能量仍然可观,赛车可在这段时间内充分利用太阳能为动力电池充电,以减少电池的额外充电量(车辆通过赛会提供的充电桩充电需要扣除相应的能耗得分),所以采用优化策略所导致的电池能耗的提高对比赛的最终成绩无较大影响。
6 结论
针对轮毂电机直驱赛车,以WSC2019世界太阳能车挑战赛为目标,建立整车优化模型。设计了改进的BB-BC算法对赛车行驶策略进行优化,得出以下结论:
(1)所建立的轮毂电机直驱赛车优化模型通过MPPT、动力电池测试以及实车道路测试结果比对,可以真实反映整车的能耗情况,具有良好的仿真精度。
(2)优化后的仿真结果表明,改进的BB-BC算法克服了传统BB-BC算法在迭代中易陷入局部最优解的问题,其具有更快的收敛速度,且收敛曲线相对平稳,可以有效缩短赛车完赛时间。
(3)进行了优化策略的赛车实车验证,在2019WSC赛事中,车队采用优化后的行驶策略顺利完成了第一赛段,结果表明了该方法的有效性。
(4)在后续的优化过程中可进一步考虑实际天气、风向以及路况等因素,以提高优化精度。
猜你喜欢
农业装备与车辆工程(2022年2期)2022-10-30
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年13期)2022-07-19
汽车实用技术(2022年12期)2022-07-05
汽车实用技术(2022年5期)2022-04-02
汽车实用技术(2021年3期)2021-02-24
智慧少年·故事叮当(2019年3期)2019-06-11
创新作文(3-4年级)(2015年7期)2015-08-06
小天使·一年级语数英综合(2014年7期)2014-06-26
