
虾蛄眼视觉系统特点及研究进展
2021-05-17 02:37许明珠孙晓婕高秀敏
光学仪器 2021年2期
许明珠,孙晓婕,曹 焱,张 钰,高秀敏
(1.上海理工大学 光电信息与计算机工程学院,上海 200093;2.杭州电子科技大学 电子信息学院,浙江 杭州 310018)
引 言
视觉系统是动物群体中的最主要的感觉系统之一。依据环境和行为需求,逐渐演化为利于生存的视觉优势,包括感知光强度和分布、颜色分辨以及检测偏振的变化等。其中,能够识别偏振极化的视觉系统要求眼睛内部的受体细胞或其中的视觉色素具有正交的取向结构。早期,在许多节肢动物中都看到了偏振敏感性[1-2],尽管许多动物的视觉系统具有偏振敏感性,但要拥有真正的偏振视觉,需要具备检测两个或多个电矢量方向的能力。迄今为止,在水下环境中,这种能力仅在脚足类和气孔类中显现出来[3-5]。尤其是脚足纲甲壳类(虾蛄),在视觉方面的表现最为出色,拥有提供立体视觉的“三目眼”[6]、16种光谱敏感度的彩色分辨系统以及线性偏振、圆偏振的识别系统。此外,脚足类动物能够旋转眼睛,从而实现对外界任意偏振角度的感知,以此协助它们能够快速捕食猎物[7]或迅速有效地躲避攻击[8]。
由于其优越的视觉特性,使得虾蛄眼的视觉研究在仿生学中脱颖而出。本文将对虾蛄眼的结构及功能进行梳理,总结虾蛄眼的仿生研究及应用前景,为后续仿生研究提供相关理论基础。
1 虾蛄的视觉系统
1.1 虾蛄眼的整体结构与功能
1988年,对虾蛄复眼的相关研究中提到,虾蛄可以用单眼至少观察到两次物体,提供了单眼具有立体视觉的可能性[9]。实际上,每只眼睛是由中间的中频带区域,将整个眼睛分为背侧和腹侧半球,整体上呈现三个不连续的并列区域,如图1(a)所示。通过以上三个独立区域,可以对视觉空间中的一点同时进行观察[10]。由此证明,虾蛄的每只眼睛实际上都是“三目”的。

图1 虾蛄眼结构的组成Fig.1 The composition of the eye structure of mantis shrimp
虾蛄的每个小眼由角膜、视锥细胞、色素细胞和视网膜细胞组成,如图1(b)所示。角膜位于虾蛄眼的最外层,具有一定屈光能力,起保护作用;晶锥位于角膜下方,由视锥细胞构成,将光源进行汇聚;色素细胞用于颜色识别;视网膜细胞的微绒毛构成阵列结构,可以将光信号转化为电信号传递至视网膜。
1988年,昆士兰大学Marshall[11]通过连续切片重建,首次揭示了虾蛄眼有16种不同的光感受器类型,其中14种是在中频带中发现的。另外,使用显微分光光度法和电生理学的直接吸光度测量法证实,除了表现形式不同之外,这16种感受器在功能上也有所不同[12],它们不仅能够利用光谱信息,而且还能利用极化作用[13-18]。
1.2 线性极化识别
虾蛄眼的背侧和腹侧两个半球区域和普通的甲壳类动物的眼睛[16-18]结构相同,包括位于远端的R8细胞和组成环形的R1~R7细胞。以腹
侧半球为例,该结构中R1、R4、R5与R2、R3、R6、R7方向的微绒毛相互正交;R8细胞对应的微绒毛同样相互正交,用数字1~8表示R1~R8细胞,如图2所示。R1~R7细胞、R8细胞对应的微绒毛均对线性极化敏感[19],背侧和腹侧半球之间存在45°差,因此能够确定4个不同的电矢量方向(见图1(a))。

图2 腹部 R8、R1~R7 细胞截面图Fig.2 Sectional view of R8 and R1~R7 cells in abdomen
1.3 圆极化识别
2008年,Chiou等[20]首次描述了一种在脚足类甲壳动物中能够检测、分析圆偏振光的视觉系统,并证明其具有区分圆偏振光的能力,该视觉系统位于中频带的第5行和第6行。其中,R8细胞对应的微绒毛沿同一个方向而且横截面呈现椭圆形,R8细胞充当1/4波片作用,能够将圆偏振转化为线偏振;R1~R7细胞对应的微绒毛横截面呈菱形,如图3所示。其中R1、R4、R5细胞和R2、R3、R6、R7细胞的微绒毛方向分别与R8细胞微绒毛方向分别呈+45°与-45°,即细胞R1、R4、R5的微绒毛和R2、R3、R6、R7细胞的微绒毛方向相互正交。由于两行之间微绒毛的方向发生90°的偏转,因此第6行对与中频带平行的电矢量敏感,而第5行对与垂直于中频带的电矢量敏感,从而实现对左、右圆偏振光的区分。

图3 中频带第 5、6 行 R8、R1~R7 细胞剖面图及微绒毛方向Fig.3 Sections of R8 and R1~R7 cells of the midband and the direction of microvilli in the 5th and 6th rows
Kleinlogel等[21]通过细胞记录的方式,发现中频带第5、6行能够用于检测圆极化,进一步证明利用解剖学和神经元特征,并使用极化层析成像确定细胞层的极化状态,测量每个状态的响应,可以测量斯托克斯的所有参数,以获得最佳的偏振视觉。
1.4 光谱分辨
彩色视觉系统位于中频带的第1~4行区域内,包含12种不同的光感受器类型,具有光谱离散的颜色通道[22-26]。
虾蛄眼的彩色视觉系统具有以下几个特点。
(1)每行都有一个远端放置的R8细胞。
1999年[24],在电生理学方面显示:虾蛄眼中的R8细胞对紫外光具有敏感性,在310,320,330,340,380 nm处灵敏度达到峰值,如图4所示。这种光谱多样性表明R8细胞中存在多种视觉色素,这些色素在紫外线范围内具有不同的最大吸光度[25]。
(2)R1~R7细胞分为两个不同的层(R1、R4、R5层和R2、R3、R6、R7层),对应的微绒毛方向正交堆叠,可用于检测400~720 nm范围内的可见光光谱。

图4 不同区域 R8 细胞的光谱灵敏度Fig.4 Spectral sensitivity of R8 cells in different regions
(3)中频带的第1、3和4行小眼具有相同的结构,R1、R4和R5细胞构成远端层,而R2、R3、R6、R7构成近端层,第2行小眼中与之相反[26-30],如图5所示。与背侧、腹侧以及第5、6行相比,虽然中频带第1~4行中的微绒毛组织性较差,并且较厚,但依然保持微绒毛的正交性,因此,利于产生干净的彩色信号[28]。

图5 彩色视觉系统结构图Fig.5 Structure diagram of color vision system
(4)中频带的第2、3行,具有带有颜色的横纹肌滤波结构,可用于实现视觉光谱的可谐调。
2001年,Cronin等[29]将具有相同视觉色素的虾蛄分别置于浅水和深水环境,虽然都能实现对在整个可见光范围的感知,但浅水环境下,在大于600 nm的波长处光谱灵敏度达到峰值。而生活在深水环境下,峰值向短波长方向偏移,如图6所示。由此证明,虾蛄自身的视觉系统,可根据环境进行滤波,实现视觉的动态可调。

图6 不同环境下的光谱灵敏度Fig.6 Spectral sensitivity in different environments
Osorio等[30]研究表明具有窄带光谱灵敏度的光感受器与具有宽带光谱灵敏度的光感受器相比,在检测颜色信号方面可靠性更强。尽管虾蛄的眼睛并没有专门增强同种颜色信号,但中频带的第2、3行通过过滤特定的光谱可能会增加某些行为相关的颜色信号的可分辨性。2000年,Chiao等[31]测量了虾蛄身体各个部位的反射光谱并使用多个双色通道的模型进行颜色编码,色度估计,结果证实了虾蛄的滤波结构可以增强其彩色信号的对比度,从而最大程度地提高动物交流中信号检测的可靠性。
(5)能够识别颜色,波长分辨率较弱。
2014年,Thoen等[32]通过食物奖励训练动物熟悉10种不同颜色的波长,波长范围400~650 nm,再利用带有波长的光纤刺激虾蛄眼,以此来测试虾蛄的颜色辨别能力。当以50~100 nm为步长给予刺激时,成功率达70%~80%;当波长间隔减小到12~25 nm时,成功率下降到50%左右。结果表明,它们能够识别颜色但波长分辨率较弱,这有助于减少大脑处理时间,以便在更短的时间对环境或猎物做出预判。
1.5 眼球运动
虾蛄眼各项功能的实现,除自身结构优势外,还需要眼球的运动加以辅助。虾蛄具有丰富的眼球运动能力,通过大范围的俯仰、偏转和旋转,它们的眼睛可以进行协调或独立的视物能力[33],通过扫视获取感兴趣的对象。在这些眼球运动中,特别值得注意的是高达90°的旋转[34-36]如图7所示。

图7 虾蛄的眼球运动Fig.7 Eye movements of mantis shrimp
虾蛄的眼球转动主要对偏振识别有影响,而且与背侧和腹侧两个半球区域有关[36]。为了了解眼球扭转如何影响偏振视觉,需要了解眼位的变化如何改变光感受器中微绒毛的方向。以图8(a)为例,背侧和腹侧半球微绒毛方向偏移了±45°。观察物体时,两个半球存在重叠区域。如果一个半球的取向使得偏振对比度最大化,眼球就会发生偏转,使另一半球最大程度地错位,避免信息的两个视觉维度之间混淆,如图8(b)所示。
除此之外,虾蛄结合神经网络中的自适应机制可以应对明暗交替的环境。解剖学中有相关研究发现,这与肌原纤维收缩、扩展有关。在昏暗的环境中,肌原纤维收缩且视锥变短,从而使光圈和视野变宽,更多的光被吸收并传输到视网膜细胞,在明亮的环境中则相反。
2 基于虾蛄眼的仿生研究
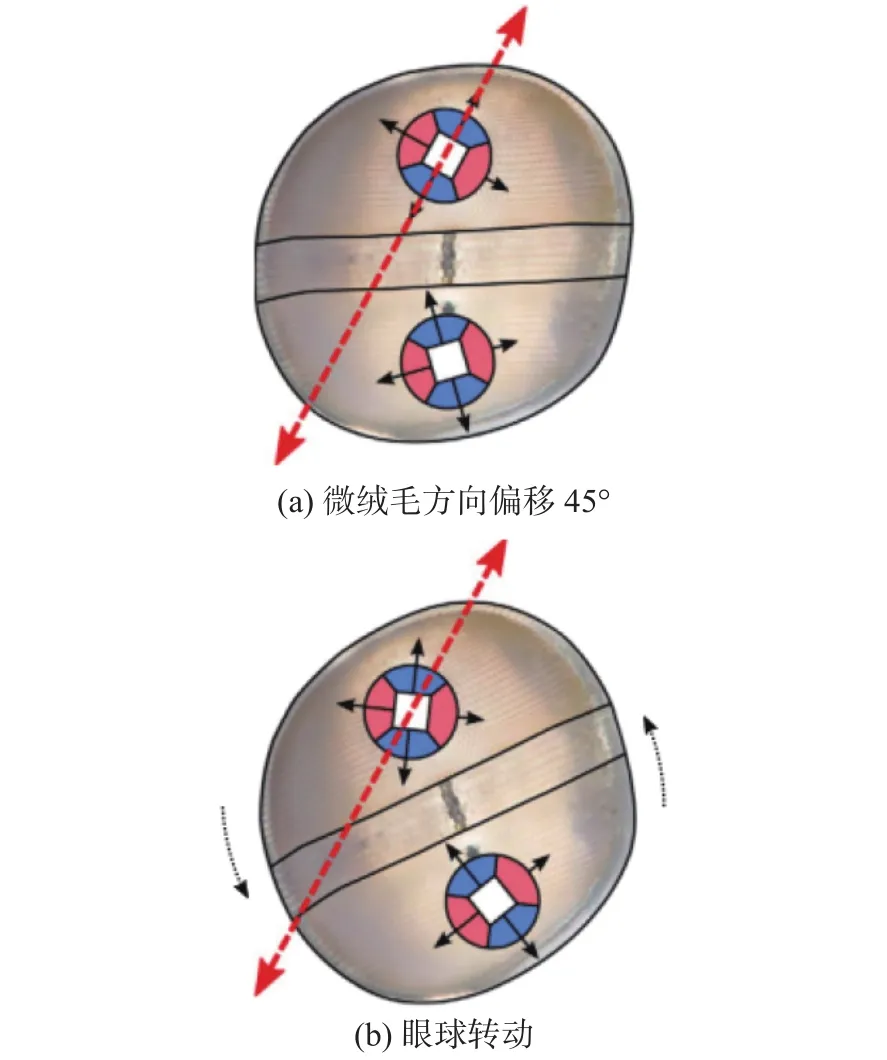
图8 虾蛄的微绒毛方向与眼球转动关系Fig.8 The relationship between the direction of microvilli of mantis shrimp and eyeball rotation
从生物学的角度来看,虾蛄拥有迄今为止发现的最复杂的动物视觉系统。在很长一段时间内,研究者们致力于利用解剖学和电生理学的方法,剖析虾蛄眼的结构,对各部分的功能进行探索。随着不断的探索发现,基于虾蛄眼的仿生研究逐渐成为研究的热点。
受虾蛄眼线偏振识别作用的启发,Gruev等[37]和Kulkarni等[38]先后设计了带有铝纳米线滤光片的偏振成像传感器,如图9所示。前者可以捕获可见光谱中的强度、角度和线性偏振度;后者使得传感器获取偏振信息的同时实现在可见光范围内的光谱选择性。
2014年,York等[39]通过将CMOS成像技术与纳米制造技术相结合,设计了一种实现线性偏振的成像传感器,如图10所示。在这种受生物启发的视觉系统中,光敏元件与铝纳米线整体集成,用作线性偏振滤光片。来自二极管的信号被线性转换为像素内部的电流,然后由每个独立像素形成图像。
2017年,Garcia等[40]通过将纳米线偏振滤光片与垂直堆叠的光电探测器单片集成为高分辨率偏振成像仪,如图11所示,可以实时记录颜色和偏振信息。在整个可见光谱范围内,量子效率均高于30%,同时在每个光谱通道上实现约40的高偏振消光比。这些研究利用了颜色和偏振信息,使海洋物种的水下成像研究成为可能。

图9 带有铝纳米线滤光片的偏振成像传感器Fig.9 Polarization imaging sensor with aluminum nanowire filter

图10 用于线性偏振识别的成像传感器Fig.10 Imaging sensor for linear polarization recognition

图11 高分辨率偏振成像仪Fig.11 High resolution polarization imager
2018年,Powell等[41]通过集成各种偏振光学元件来模仿螳螂虾的偏振敏感视觉系统,如图12 所示。将以 0°、45°、90°和 135°排列的铝纳米线极化滤光片沉积到图像传感器的像素上。这使摄像机能够捕获强度,部分偏振和偏振角图像,以此测量水下偏振角,这项研究为远程水下航行打开了新的可能性。

图12 测量水下偏振的视觉仿生系统Fig.12 Visual bionic system for measuring underwater polarization
2019年,Basiri等[42]设计了垂直整合的双层超表面,模仿虾蛄眼结构,以区分左右圆偏振。类眼状的双层超表面设计由充当QWP的纳米结构双折射超表面、线性偏振纳米光栅和介电间隔层组成,如图13所示。通过实验证明所设计的亚微米级圆偏振滤光片,其峰值消光比高达35,在近红外波长下的最大透射效率接近80%。此外,将圆偏振滤光片与线性偏振滤光片整体集成在一起,如图14所示,可以实现对具有任意偏振态的光进行全斯托克斯偏振测量。
国内基于虾蛄眼的仿生研究相对较少,但也取得了不错的研究成果。2011年,台北国立科技大学Jen等[43]受到虾蛄眼中充当极化转化器的R8细胞的微绒毛结构的启发,设计并制造了包含两种不同类型纳米棒阵列的周期性多层结构,如图15所示。形态上类似于眼细胞,所涉及的周期性多层结构,解决了典型波片由于介电材料折射率差异导致相位延迟的问题,实现了在可见光范围内的消色差作用。
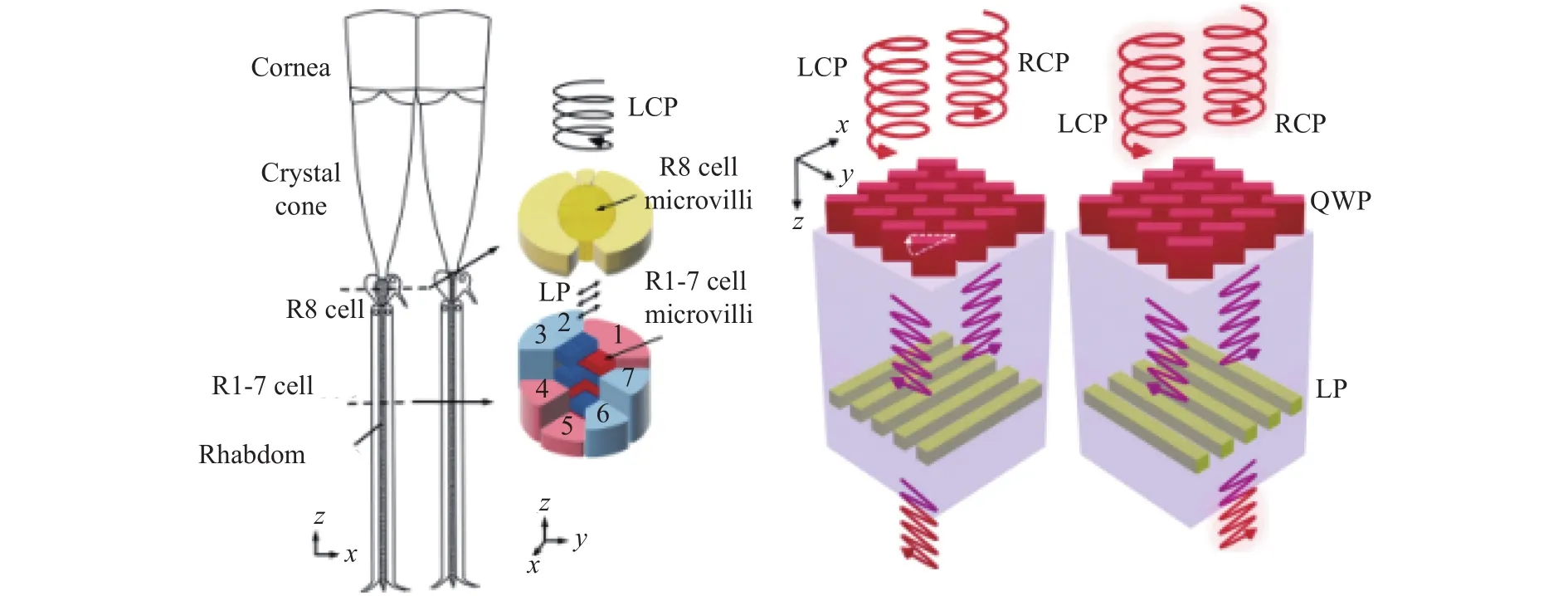
图13 双层超表面结构图Fig.13 Double-layer metasurface structure

图14 任意偏振态测量的焦平面结构Fig.14 Focal plane structure for arbitrary polarization measurement
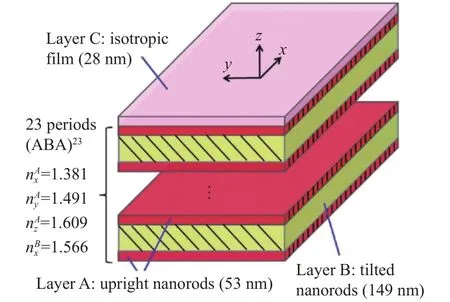
图15 周期性多层结构的纳米棒阵列Fig.15 Nanorod array with a periodic multilayer structure
2013年,南京晓庄学院张家华等[44]根据虾蛄根据环境光照改变调节视域范围的原理,提出一种图像信息采集系统,极大地提高了采样图像的成像效果。2014年,河海大学沈洁等[45]模拟虾蛄的复眼结构,采集六个偏振信号光强:I30°、I75°、I120°、I165°(线偏振)以及左右圆偏振IL、IR,建立拮抗偏振模型,最终通过计算得到偏振度参数,即获取拮抗参数成功改善目标与背景之间的对比度,提高水下目标检测的精度。2016年,赵永强等[46]设计一种仿虾蛄眼的大视场多谱段偏振视觉系统,如图16所示,该系统为3×3阵列结构,阵列四角和中心的五个相机用于光谱识别,其他四个相机分别设置为0°、45°、90°、135°方向上的偏振探测,最终将九个相机获得的图像输入计算机,经图像处理获得大视场的偏振图像以及光谱图像。

图16 多谱段偏振视觉系统Fig.16 Multi-spectral polarization vision system
2017年,长春理工大学刘志颖设计仿虾蛄眼谱段的可选偏振态以及多通道实时多谱段偏振成像探测装置[47-48],以此提高目标探测的精度。2019年,长春理工大学设计了一种硅与铝纳米线栅结集成的双层线偏振探测结构[49],如图17所示。实验表明,该结构能够平衡吸收率与消光比之间的矛盾。此外,受虾蛄眼正交微绒毛阵列的启发,仿生设计垂直堆叠的双层线栅结构(见图18),实现对两个正交方向偏振光的吸收,有利于提高空间分辨率。

图17 双层线偏振探测结构Fig.17 Double-layer linear polarization detection structure

图18 垂直堆叠的双层线栅结构Fig.18 The structure of Vertically stacked double-layer wire grid
3 应用前景
3.1 水下目标探测
螳螂虾的视觉系统不仅具有复杂的器官特征,而且具有主动的适应机制。2014年,Chen等[50]提出了一种基于视觉适应机制的水下物体提取方法。借助螳螂虾复眼的视觉适应机制,利用机器学习方法解决了加权信息融合的问题,实验结果证明了该方法在水下物体提取中的精度高于传统方法。
3.2 医学检测
医学研究发现,癌变组织与健康组织能够反射不同的偏振光,而虾蛄眼能对人眼无法观测的偏振光进行识别,将这一原理用于视觉影像可进行癌变组织的检测。2014年,Patel等[51]在医学杂志上发表,使用组合染料增强的广域荧光偏振成像来对癌症细胞边缘进行检验。荧光偏振描绘了乳腺癌细胞的外侧边缘,其对比度优于光学相干断层扫描提供的对比度,证明了偏振效应能够有效诊断癌细胞,在疾病诊断方面都有独特的优势。
除此之外,虾蛄的动态极化视觉系统,可以增强物体与其背景之间的视觉对比度。这对于极化照相机和图像处理领域开发十分有利,也可以用于自主智能导航或用于自主安全系统的传感器[52]中。
4 结 论
综上所述,虾蛄的视觉系统能够能够对线性和圆偏振进行识别,结合眼球运动,可以达到最佳的偏振视觉效果。虾蛄眼可以实现单目测距、多通道光谱偏振成像以及虾蛄眼中微结构可以实现消色差1/4波片的功能。因此虾蛄眼的仿生研究具有广阔的应用前景,对导航、目标探测、卫星遥感、医疗诊断等众多领域的发展具有重要的推动作用。
目前,以虾蛄眼解剖学作为基础,对虾蛄眼的功能已经有了一定的认识,但虾蛄眼视觉系统复杂,影响因素众多,仍然存在许多问题有待研究,例如:颜色识别和偏振系统之间如何平衡?视觉神经纤维内外的信息如何处理?以及如何将两只眼睛的信息有效的结合起来?虾蛄眼视觉系统的仿生技术仍处于初步发展阶段,将虾蛄眼的视觉优势深入开发,仍存在较大的挑战与研究价值。
猜你喜欢
——皮皮虾
科学大众(2023年20期)2023-10-26
水产学杂志(2023年1期)2023-02-26
科学养鱼(2022年6期)2022-07-29
电脑知识与技术·经验技巧(2020年5期)2020-06-22
航天电子对抗(2019年4期)2019-06-02
川北医学院学报(2018年4期)2018-09-04
保健与生活(2018年15期)2018-01-27
电子测试(2017年15期)2017-12-18
——鞭毛、纤毛和微绒毛(2)
生物学通报(2017年8期)2017-04-09
长春理工大学学报(自然科学版)(2015年5期)2015-10-12
