
一种基于Solidworks的河流水流流量流速的监测装置的研究∗
2021-07-16 14:05杨要恩刘明治冯浩杰
电子器件 2021年3期
杨要恩,吴 松,刘明治,孟 杨∗,冯浩杰
(1.石家庄铁路职业技术学院轨道交通系,河北 石家庄 050043;2,西安电子科技大学机电工程学院,陕西 西安 110071)
流量是指单位时间内通过某一过水断面的水体体积,是河流重要的水文特征。在水文监测中,流量监测是其中的核心内容,也是监测难度最大的一项。流量测验方法很多,常用的有流速面积法、水力学法、物理法、化学法、直接法等等。在各种监测方法中所用的监测手段也各有不同,传统的监测手段一般需要依靠测量人员下水完成,流量测量工作量大,耗时长,测量效率低下,测量精度与测量人员的经验技术有很大关系,对于洪水时期的流量测量就更难实现了[1-3]。
随着水利信息化技术的进步,非接触式的测量技术凭借安全高效的测量方式、准确的测量结果等优势得到了长足的发展,雷达式的水位和流速测量装置在国内得到了推广应用,尤其是近年新建的站点。但是,国内基于非接触式的雷达流量测量设备的研究较少,还有很多关键技术问题尚需解决,尚未形成成熟的产品[4-6]。
根据«河流流量测验规范»要求[3],采用流速面积法测流,需要在断面上布设足够多的测速垂线、在每条垂线上还要布设多个测点,测得每个测点的流速,计算断面流量。为了减少测点,陈兴伟等[1]提出了垂线上的流速分布模型,目的是简化垂线上的测点,在一条测速垂线上测一点或两点流速,通过模型公式计算出垂线平均流速,从而缩短测流间。从理论上可以采用流速面积法测流,但在近几年的实际测试中应用中,暴露出了一系列问题。所暴露的问题一方面表现在采用流速面积法测流时[7-10],要求测速所用的传感器只能在某一垂直水位上可以上下移动,而不能左右晃动,这就要求测速传感器和装载传感器的浮船不能是一体化的,要确保装载传感器的浮船在外力比如大风的影响下浮船可以左右上下晃动但传感器不能左右晃动,从而确保传感器采集到的水速信号始终在同一垂线上的水速,进而采用陈兴伟等提出的垂线流速分布模型计算可得到水流量的真实值;另一方面,在对水量水速长期实时监测过程中,传感器与装载传感器的浮船易被水中杂物阻扰,水中杂物频频阻碍传感器使得数据的监测不准确。
为了解决这些在实践中存在的问题急需从一个新的角度入手设计一款测量监测装置。从一个新的角度克服现有技术在长期测量时拦挂杂物垃圾及传感器左右晃动的不足。以往浮船监测装置的设计主要是二维CAD 平面设计,无法进行虚拟样机的三维设计和动态仿真测试,导致传感器在外力作用下左右晃动测试结果不准确的结果。
因而,本研究提供一种基于Solidworks 虚拟现实软件设计技术进行设计并进行在外力作用下浮船晃动而传感器始终保持同一垂面上下移动的仿真测试。采用基于Solidworks 的虚拟设计的技术,可以实现浮船监测装置结构设计的数字化,在计算机中建立面向全生命周期的数据产品模型,提高了设计效率,可以减少因制作物理原型所耗费的人力、物力和时间,降低费用,缩短周期。所设计的传感器与浮船相互独立水流量流速的测量监测装置,具有结构简单,拆卸组装方便的特点。
1 测载装置的总体设计
本设计提供设计的船体结构,如图1 所示:两个浮子组成的船体、监测传感器固定装置、船体固定装置和固定连接装置共同构成。由于其宽大的船身为船体在水中漂浮提供了足够的稳定性支撑,且船身也具有承受较大水流冲击的能力和容纳各种模块的密封空间,可保证设备的稳定运行。船体的船身和船头均采用流线型弧形设计方式,这使得该浮船可以更好更有效地避免阻挡水中的杂物,通过船头船身的流线型弧形设计将迎面而来的树枝、塑料袋、泡沫板等杂物经水流的带动下从船的两侧和下面导出避免了船身钩挂杂物;而船体固定装置使用两根从河两岸岸堤上的钢索与船体固定装置连接,通过船体固定装置上的挂重配件使船体稳定减少了外界环境对船体造成晃动从而避免了水的流动使船跑偏的问题;最后通过固定连接装置将船体和固定装置连接,通过以上部分的共同作用最终使其监测传感器不会受外界的环境的影响而导致监测数据的不准确。
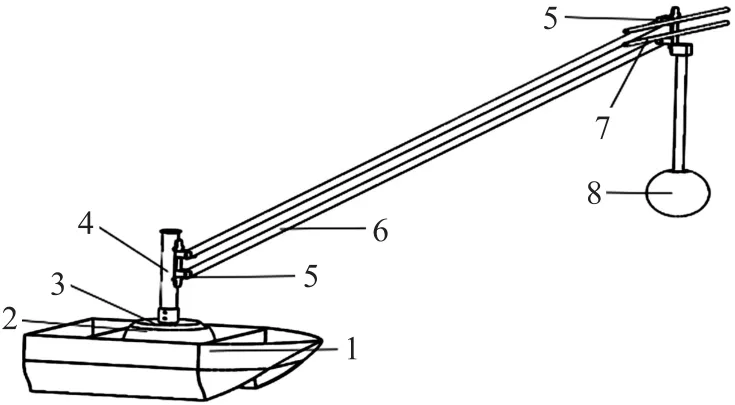
图1 船体总设计图
1.1 船体的设计
该设计的船体是将两只独立的船浮子中后部连接组成船体,在船体的中间连接处设计了放置固定监测传感器底座的卡槽和监测传感器底座固定装置,如图2 所示。本设计中,两只独立的船浮子大小相等,左右完全对称,受力平衡,可以平稳地浸透于水中。该船体由其宽大的船身为整条船在水中漂浮提供了足够的稳定性支撑,且船身也具有承受较大水流冲击的能力。通过隔离挡板将船体分为一个个独立的防水仓从而可以容纳各种模块,可保证设备的稳定运行。船体的船身和船头均采用流线型弧形设计方式,这使得该浮船可以更好更有效地避免阻挡水中的杂物,通过船头船身的流线型弧形设计将迎面而来的树枝、塑料袋、泡沫板等杂物经水流的带动下从船的两侧和下面导出,避免了船身钩挂杂物造成监测数据的不准确。

图2 船体俯视图
1.2 监测传感器固定装置的设计
该设计的监测传感器底座装置的设计采用了球形监控摄像头的工作原理并使之与船体独立,如图3~图6 所示。监测传感器底座为一个球型,位于船体的中间,左右对称,在监测传感器底座的下侧切通一个槽口用来放置监测传感器,将球面上侧削平加装一根可以固定监测传感器底座的固定拉杆,监测传感器底座固定装置与船体设计为一体并可以与固定上盖用螺丝螺母连接实现密封,监测传感器底座固定装置为上下贯通,为防止河水进入船体,将监测传感器固定装置与船体四周进行了密封处理。将监测传感器底座放入监测传感器固定装置后,即使船体受水流的冲击左右摇摆时监测传感器固定装置与船体可以绕着传感器底座自由运动而不影响监测传感器底座保持不动的固定姿态,从而有效地解决了测量数据的精准性。监测传感器底座与监测传感器为固定连接,通过螺丝孔将监测传感器底座来固定监测传感器,只要监测传感器底座通过与固定拉杆的固定从而保持不动,监测传感器就会保持不动从而实现精确测量。

图3 传感器底座左视图
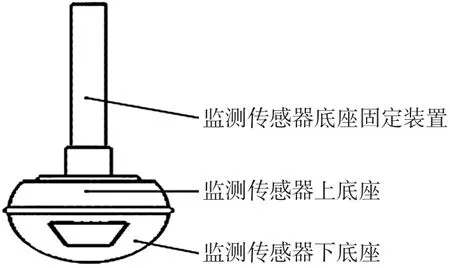
图4 传感器底座正视图

图5 传感器底座与传感器侧视图
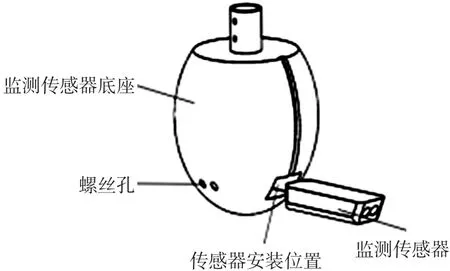
图6 传感器底座与传感器装配图
1.3 船体固定装置和固定连接装置的设计
因为监测装置是需要常年固定在一处进行监测的装置,所以浮船的固定也尤为重要。浮船固定装置由两个拉杆固定装置和两根固定拉杆、两根钢缆、一个挂重配件共同组成。固定拉杆用螺丝螺母连接拉杆固定装置,两根固定拉杆是平行状态,可以根据不同的水位高度需求任意竖直调节拉杆与船体的水平夹角,而不影响传感器的水平监测状态,如图7、图8 所示。从河两岸岸堤上连接两根钢索,钢索与挂重配件一同由螺丝螺母固定在拉杆固定装置上,通过以上部件的共同作用使监测器可以准确测量数据。

图7 连接装置
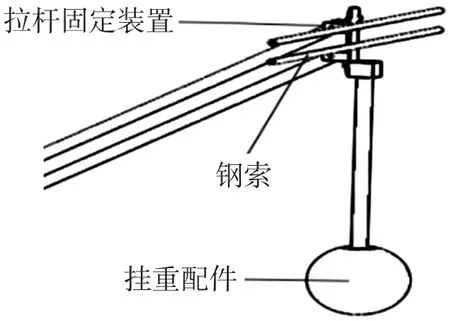
图8 固定装置
2 测载分离装置的具体实施
该设计为一种基于浮船技术的水位流量流速的测量监测装置。该浮船通过滚塑机生产其船体结实耐用、密闭性好、稳定性可靠。船体由两个浮子组成船体,监测传感器固定装置、船体固定装置和固定连接装置组成,其船体的船身和船头均采用流线型弧形设计方式,这使得该浮船可以更好更有效地避免水中的杂物堆积拦挂对监测传感器的测量数据产生影响。在船体的中间设置的监测传感器底座的卡槽和监测传感器底座固定装置,通过滚塑机可以将此结构与船体形成密封性空间,再同样用滚塑机做出一个球型监测传感器底座,将球型监测传感器底座下侧进行切削加工出一个槽口放置监测传感器,上侧切出一个平面并安装一根固定拉杆,最后将监测传感器底座放入监测传感器底座的卡槽和监测传感器底座固定装置内,将固定上盖与监测传感器底座固定装置用螺丝螺母连接,使得浮船在受水流的影响左右倾斜运动时监测传感器都始终保持水平不受浮船运动的影响。由一个拉杆固定装置固定在监测传感器底座上的固定拉杆上,另一个拉杆固定装置则与两根钢缆连接并用挂重配件使其稳定,而两根固定拉杆由螺丝螺母固定在固定拉杆之上,这个固定装置将浮船固定在一处漂浮而不会被水冲走。
同时考虑到测量装置在不同的场合中的需求而使用,可以采用有线和无线两种方式,无线方式:浮船的船身通过滚塑机制造有其很好的密封性,利用其密封性能在浮船的船身上制造隔离舱,用来放置电源模块、无线通信模块、监测控制模块等。在浮船的顶部有较大的空间安装太阳能电板,通过太阳能电板发电后再由电源模块分配给监测装置,从而带动各个设备的运行进行测量河水的流量流速。有线方式:相对于无线使用方式有线方式只需将传感器的线经由固定拉杆,经钢缆送入河岸里的监测主机房与监测设备连接即可。该设计提供的船体装置与监测传感器底座属于独立结构,船身的晃动不会影响监测传感器的水平监测状态。在长期实时监测过程中,由于外力如风力、水量水速等的变化,会导致传感器固定装置船身发生晃动,采用一体化设计方式使得监测传感器固定装置(3、4)与船体固定装置(7、8)通过固定连接装置(5、6)连接成为一个整体,在固定连接装置5、6 的作用下,监测传感器在监测传感器固定装置(3、4)里只能在竖直方向运动,而不能左右晃动,可以满足长期实时监测只能在同一垂线范围内监测的需求(参见图1)。对所设计的装置用Solidworks 进行模拟测试应用,测试结果如图9~图14 所示,由于采用了一体化设计方式,船身的左右晃动对传感器没有影响,使得传感器测试的数据准确无误。该设计最显著的特点一是采用了测量装置和浮船分离的方式,使得船体受水流的冲击左右摇摆时固定装置可以绕着监测传感器底座左右运动而不影响监测传感器水平不动的固定姿态,二是监测传感器底座上的固定拉杆和两根固定拉杆装置连接,使船体受水流冲击倾斜使传感器依然垂直向下保持不动使测量的水流流速均在一个平面,通过这两个方面的独立设计使得测量的数据不受到外来环境的影响其准确性。本设计提供的监测装置可以根据不同的场合中的需求而使用,可以采用有线和无线两种方式,极大地弥补了现有的监测装置的缺陷。
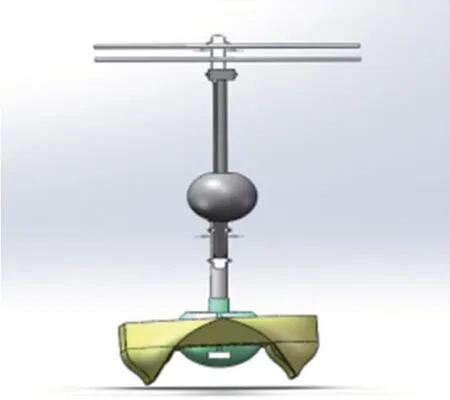
图9 船身晃动5°传感器保持水平

图10 船身晃10°传感器保持水平

图11 船身晃动15°传感器保持水平
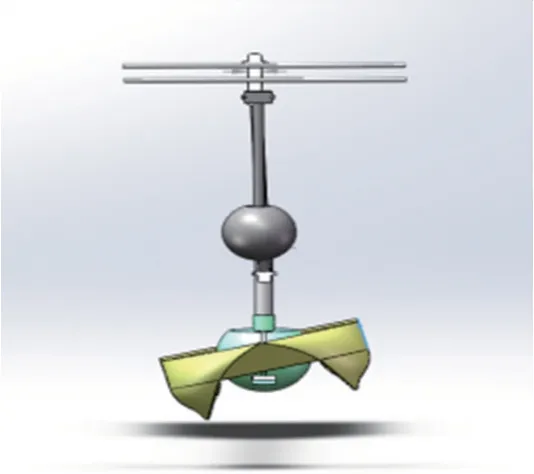
图12 船身晃动20°传感器保持水平

图13 船身晃25°传感器保持水平
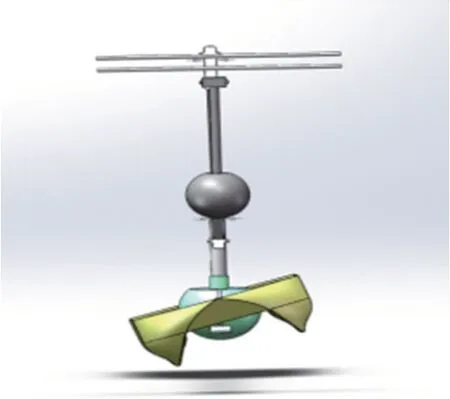
图14 船身晃动30°传感器保持水平
3 应用与验证
对河流水量水速的实时非接触式监测系统的研制已经经历了数次改进,在实际应用中总会出现这样那样的问题,在本次改进中,主要是采用基于Solidworks 虚拟现实技术改进了传感器测载装置和传感器的安装模式,使得传感器在测载装置的固定下只能进行上下移动而不能进行前后左右的晃动,进而保证了测试数据的准确性,且采用流线型传感器接触面,保证了河流表面漂浮的垃圾不被缠绕。
将所改进设计的测载系统用于某河流的水速水量流量的实时监测中,经过现场实际测试,该设计中的河流水流流量流速的监测装置体现出良好的使用性能,在外力如风力河水的冲击下监测装置并未产生剧烈的摇摆其监测数据测量准确;在河水的带动下河面漂浮的垃圾也被船体顺利从两侧导出并未出现垃圾杂物缠绕在监测装置上给数据的监测准确性带来影响。如图15 所示为现场实际测试图。如图16 所示为某河流的实时监测结果。同时考虑到测量装置在不同的场合中的需求而使用,可以采用有线和无线两种方式,无线方式:浮船的船身通过滚塑机制造有其很好的密封性,利用其密封性能在浮船的船身上制造隔离舱,用来放置电源模块、无线通信模块、监测控制模块等。在浮船的顶部有较大的空间安装太阳能电板,通过太阳能电板发电后再由电源模块分配给监测装置,从而带动各个设备的运行进行测量河水的流量流速。有线方式:相对于无线使用方式有线方式只需将传感器的线经由固定拉杆,经钢缆送入河岸里的监测主机房与监测设备连接即可。

图15 现场实际测试图

图16 实时水流流速流量监测图
4 结论
开放性河流的水量水速的实时测试是目前国内外工程界比较难以解决的问题,没有一套成熟的理论和成套的监测装置产品化、规范化。对于监测装置采用二维CAD 计算机辅助设计已经无法满足在应用过程中遇到的各类问题,因而采用基于Solidworks 虚拟现实技术进行三维数字化设计,利用滚塑机一次性成型技术进行加工生产,可以实现传感器在外力作用下始终保持在同一垂线上,可以保证所监测的水速水量数值准确。并采用该装置在某河流中进行长期实时监测,所测得的水速、水量及流量正确,且长期应用过程中,传感器与测载装置未挂垃圾。该测试装置测试数据准确可靠、简单易拆卸、性价比高、易批量化生产,市场应用前景广阔。
猜你喜欢
青少年科技博览(中学版)(2023年1期)2023-03-17
锻压装备与制造技术(2021年3期)2021-08-13
现代仪器与医疗(2021年2期)2021-07-21
快乐语文(2020年12期)2020-06-02
小学阅读指南·高年级版(2020年3期)2020-04-01
中国交通信息化(2017年10期)2017-06-06
铁道机车车辆(2016年3期)2016-10-25
中国医学装备(2015年10期)2015-12-29
汽车文摘(2015年11期)2015-12-14
振动、测试与诊断(2014年4期)2014-03-01
