
基于激光雷达点云数据的树种识别系统设计
2021-07-30 07:58张继伟罗哲轩蔡澍雨
电子设计工程 2021年14期
张继伟,罗哲轩,蔡澍雨
(云南电网有限责任公司带电作业分公司,云南昆明 650011)
地面激光雷达着眼于研究提取森林参数,主体 包括树高、冠幅、郁闭度以及生物量等[1]。在计算机、电子、光学技术持续发展的背景下,三维重建的研究在计算机图形学以及机器视觉等研究领域的地位也越发重要[2]。目前,大部分树种识别研究着眼于借助多光谱、高光谱遥感,机载激光雷达在大区域森林垂直结构的获取上,能力较为凸出,将机载激光雷达数据与多光谱遥感影像融合,同时结合各种植被指数及光谱特征和纹理特征,从而实现对地物的识别和分类。
传统的三维模型重建大部分是以二维图像信息为基础,没有办法获取全面数据,对此,提出了以激光雷达点云数据为基础的树种识别系统设计。激光雷达是一种新兴探测系统,它的特点是非接触主动式,借助计算能够获得目标精确的三维空间坐标信息,借助机械部分的运动,使激光雷达执行持续扫描操作,便可以获得一组三维空间坐标数据,把这些数据称之为云数据。凭借计算机对点云数据如点、线、面、多边形、曲面等描述物体的立体模型,最后达到物种识别的目的。
1 激光雷达点云数据识别原理
激光雷达点云数据识别的基本工作原理是:上位机掌控扫描仪扫描参数,由激光发射器发射激光,抵达目标后再反射回来,由激光接收器负责接收信号[3],并计算目标距离;当激光测距系统测量距离时,激光扫描系统执行扫描操作,保证激光发射器的发射角度不断变换,最后扫遍全部视场,完成扫描操作;当激光扫描仪启动时,采集到的数据通过扫描仪传输到上位机,上位机执行数据的三维可视化显示以及存储操作,其工作原理如图1 所示。

图1 激光雷达点云工作原理
当执行扫描操作时,激光扫描仪向上位机传输探测到的距离、相应的水平以及俯仰角度[4]。建立激光雷达局部扫描坐标系,如图2 所示。
图2 坐标系中三维坐标点为W(x,y,z),其各个坐标的计算公式为:

图2 激光雷达局部扫描坐标系

式中,α表示竖直方向上的红外激光束,β表示水平方向上的激光束角度,R表示扫描仪镜头到地面扫描点的斜距离。
2 系统硬件结构设计
基于激光雷达点云数据的树种识别系统硬件结构设计框图如图3 所示。

图3 系统硬件结构框图
在硬件设计中,由键盘向FPGA 发送图像采集控制信号,FPGA 把该信号传递给A/D 转换器,抓拍树木图像同时执行A/D 变换操作,为后续处理提供便捷,DSP 用于处理、保存采集到的图像[5-6]。
2.1 K6多光谱摄像机
K6 是一种半导体成像器件,拥有灵敏度高、抵抗强光能力强、畸变不大、体积小、使用时间长、抗震动性等优势[7]。
被摄树种的图像通过镜头聚焦到K6 芯片上,K6可识别绿光、红光、红边、近红外4 个波段,能够快速捕捉图像,依靠光的强弱聚集对应比例的电荷,各像素积聚的电荷在视频时序的控制下逐渐外移,经过滤波、放大操作后,生成影像信号输出[8]。影像信号连接到监视器、影像输入端就能够看见同原始图像一样的影像。它是一种半导体成像器件,为达到简化K6 多光谱摄像机的供电目的,通常情况从外部仅输入一种电源(5 V),机内电源变换是其他各种电压值的获取渠道来源[9]。
2.2 图像处理器
图像处理器可以起到消除噪点、修正数码照片的广角畸变、使图片对比度增大、去除红眼等作用,图片合成即合并多张图片,完成将图片内容改变的操作,图片合成一般情况下需借助抠图完成,图片合成的重要意义是凭借抠图操作将背景或者图片直接合成多图片,各种各样的融合模式都可以作为图片合成的方式。
3 软件设计
3.1 树种特征识别与生长估算
在上述激光雷达点数获取基础上,在对树种识别过程中,为保证识别的准确性,要对树种的树高、冠高以及最长冠幅进行提取[10]。
在获取的树种激光雷达点云数据中,假设获取的树种高度位置为A,其坐标最大值设为Amax,树种底部为最小值即Amin,底部与顶部的距离即树种的高度,即树高HA:

在提取冠高时,将冠高看作树冠顶部到树冠最低点的竖直距离[11]。树冠的最低点确定较为困难,树木的冠层底部较为复杂,在获取树冠底层点时借助激光雷达对树木的点云进行三维数据获取,避免树冠层底部点的误差。将树冠层的顶部设为C,其最大值为Cmax,其最小值为Cmin,最大值与最小值的差值为树冠层的冠高,即:

在获取树木最长冠幅时,借助激光雷达获取树种冠幅的三维点云数据[12]。假设获取的冠幅激光点云数据集合为v,获取其中每个点云数据的最高点ti在二维坐标中与树木其他顶部位置的欧式距离,将距离最远的两个点之间的距离认为是树种的最长冠幅Lmax,即:

其中,ti,tj∈t,i≠j。
通过上述分析,可获取树木的高度等特征,为后续的树木与输电线之间设置安全距离奠定基础。
树木随着时间变化其树高等特征会发生变化[13]。为了保障输电线路正常运行,需要对树木生长进行估算。文中在不考虑其他因素条件下,分析树木的生长时间与树高的关系。引入GAM 模型,对树木的增长率进行估算,GAM 模型[14]的时间函数为:

式中,t代表树木生长的时间,a代表树木初始生长的高度。一般情况下,n的取值范围为3~4,若其值太小将导致预测模型呈现线性化,预测结果存在一定偏差。
3.2 电力线点的提取
将激光点云数据中存在的电力线数据进行提取。首先确定电力线的数量和起点,在高度的最小值基础上确定电力线的下导线。激光雷达在运行过程中借助回波现象确定电力线上的障碍物,因此将电力线点云集中分布在第一次回波中。所以分析首次回波的激光点可分辨出部分障碍物,保留电力线。
假设在点P在一个圆形区域中,该区域的半径为l,假设P点与该圆形范围内的任意一点的最大倾斜角小于固定的阈值σ,那么这一点在电力线点的范围中,若大于阈值σ则该点为树木点,即:

式中,Di代表两点之间倾斜的角度,κi、xi、yi表示两点间的三维坐标。
3.3 输电线路安全距离分析
在输电线路树障安全距离检测前,根据《架空输电线路运行规程》(DL/T741-2010)[15],导线距树木输电线走廊内的安全距离如表1 所示。

表1 导线与树木之间安全距离
根据电力行业标准对输电线路安全距离进行检测,在不同工况条件下完成输电线路隐患检测。
在输电线路巡检过程中可能存在低温、大风以及覆冰的天气,此时需要对输电线的控制应力进行计算,根据应力大小检测输电线路的安全距离[16]。假设umax表示输电线路最大许用应力,年均气温下的最大许用应力为utem。输电线路的许用应力为:

年平均许用应力为:

式中,R代表拉断力,fq代表输电线路强度安全系数,其范围为2~4,S代表输电线路截面积。
4 系统调试
以云南地区为基准,对基于激光雷达点云数据的树种识别系统设计合理性进行实验验证分析。
4.1 实验地区环境分析
云南地区优势树种有桉树、圣诞树、云南松、水冬瓜及橡胶树,此类树种的通性是长势较快。文中系统借助激光雷达结合多光谱影像对桉树、圣诞树、云南松、水冬瓜及橡胶树等优势树种的识别任务,以不同树种的生长模型作为依据,执行输电线路通道的树木隐患分析预测研究,使输电线路运维单位树障隐患预知能力有所提高。
4.2 结果分析
采用系统采集到的图像大小为720×576,由于树木颜色较深,智能提取部分亮度信息,然后由系统的核心处理器完成图像处理等操作。图像处理结果如图4 所示。
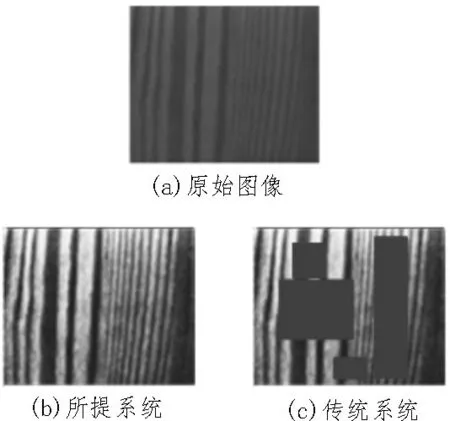
图4 图像处理结果
依据图像处理结果可知,采用传统系统处理结果存在模糊现象,而采用所设计系统处理结果较为清晰。基于该现象,分别采用传统系统与所设计系统的识别效果进行对比分析,结果如图5 所示。

图5 两种系统识别效果对比分析
由图5 可知,采用传统系统识别效果最高为48%,最低为20%;而采用所设计系统识别效果最高为98%,最低为75%。由此可知,基于激光雷达点云数据的树种识别系统设计具有合理性。
5 结束语
激光雷达是一种新兴的物体表面数据扫描系统,有利于直接得到目标表面的三维位置信息数据,其在逆向工程、CAD、地理测绘、数字化城市、虚拟场景等领域备受重用,其中,点云数据的采集和三维重建成为激光雷达相关工作的重要助力。
猜你喜欢
北京测绘(2022年5期)2022-11-22
汽车观察(2021年8期)2021-09-01
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
现代园艺(2018年2期)2018-03-15
电子制作(2017年14期)2017-12-18
电信科学(2016年11期)2016-11-23
中国林业产业(2016年5期)2016-04-03
中国林业产业(2016年5期)2016-04-03
武夷学院学报(2014年5期)2014-07-19
