
面向网络攻击下弹性均值趋同的智能体群组编队
2021-07-31 12:42王刚阳伍益明胡沁伶
控制理论与应用 2021年7期
王刚阳,徐 明,伍益明,胡沁伶,郑 宁
(杭州电子科技大学网络空间安全学院,浙江杭州 310018)
1 引言
多智能体系统编队控制是目前国内外研究的热门课题之一.这种群体行为控制是解决多智能体协作问题的基础,对实现多智能体在分布式空间环境中协同执行任务具有重要意义,目前智能体群组编队已在很多领域得到应用[1–3].例如在工业领域,人们控制多个移动机器人以特定队形搬运物体;在军事上,多个自主式小车被用于编队巡逻或侦察;在警务领域,人们控制多无人机组成弧形包围网捕获入侵者等.多智能体编队的一种重要方法是分布式协同控制,其关键技术之一是状态值趋同,即系统中的每个成员通过本地感知收集不同的状态值,与邻居交换这些信息,协调全局变量达到一致[4–8].目前学者们已提出多种方法解决多智能体系统趋同问题[5–7].但这些研究成果中大多数都假设所有的智能体处于一个安全的工作环境,即它们的控制器、传感器等不会因网络攻击而失效.显然,随着网络安全事件日益突发,高度网络化的多智能体系统容易遭受恶意攻击.例如,攻击者可能通过控制网络中部分智能体的通信模块,传递虚假数据,致使系统性能下降或发生严重错误[9–11].因此,有必要考虑一种安全的编队控制通信网络,不仅能满足节点间信息及时且完整传输的需求,同时又具备抵抗网络攻击的能力,进而提高系统完成任务的效率.
为了从控制理论的角度刻画通信图抵御网络攻击的能力,文献[9]提出了所谓的r–鲁棒图这一概念.作者研究表明,对于通信拓扑满足r–鲁棒图的多智能体系统,即使部分节点在趋同过程中存在恶意攻击行为,通过设计合适的控制协议,系统整体上仍能实现状态趋同.r–鲁棒图这一拓扑属性,本质上保证了即使从网络中移除特定数目的节点和链路,剩余部分网络仍能保持足够的连通性.基于满足r–鲁棒图的网络,文献[12–14]提出了几类网络攻击下的多智能体系统弹性趋同(resilient consensus)控制器设计方法.
尽管r–鲁棒图对刻画系统抵御网络攻击的能力提供了良好的帮助,但如何通过移动多智能体间的相互协作以构造具有r–鲁棒性的网络,使其适用于真实的复杂环境中,一直是多智能体系统趋同控制领域的难点[15].近年来研究者们提出了一系列通过设计特殊结构的拓扑构造r–鲁棒图的方法[14,16–20].Zhang等[16]率先分析并量化了复杂网络中3种常见图结构的鲁棒性.随后,Usevitch等[17]指出在无(有)向循环图中,当网络中任意节点都满足k–连通度时,该网络为一个–鲁棒图.文献[14,18–19]则在不改变网络鲁棒性的前提下,分别设计给出了系统中扩增节点数目的方法.另外,文献[21]提出通过聚类方法构造移动多智能体网络鲁棒性,但所提方法中每个节点都需要独立的定位设备.在文献[22]中,作者引入周期性循环图的概念,提出一种基于领导者–跟随者运动框架下构造r–鲁棒图的方法.但这种方法的缺点是在图构造过程中所需时间随着数值r的增大而急剧增大.文献[23–25]中则引入了异构节点的概念,通过设立系统中部分节点为信任节点,据此构造特定的鲁棒图.最近的文献[20]表明,可通过对移动智能体施加合适的运动策略,使系统拓扑成为周期性切换网络,该网络进一步可映射为一个等效的特定鲁棒图.上述研究说明合适的多智能体编队方法能保证通信网络的质量并使该移动网络具有鲁棒性,良好的通信网络是多智能体协同控制的基础,协同控制又保证了多智能体编队控制的协调、稳定.在文献[26–27]中,作者提出“模块化”构造网络方法,不仅实现了网络鲁棒图的构建,还能使有限通信范围的移动智能体群按照任务需求覆盖特定的物理区域.但所提方法中模块的设计需满足特定的结构,且不便于扩展以形成具有更高鲁棒性的网络.
基于以上讨论,本文旨在复杂环境中部署通信范围有限的移动智能体,研究其在网络攻击下的弹性趋同控制问题.同时设计安全的群组编队方法以构造具有鲁棒性的移动多智能体网络.主要贡献如下:
1) 趋同控制器设计方面.受文献[28]启发,提出一种适用于移动网络的弹性均值趋同控制方法.相较于以文献[22]为代表的传统弹性趋同算法,所提算法可有效抵御网络攻击的干扰,并将最终趋同值控制在初始状态值的算术平均值.
2) 网络通信图构建方面.将“小组化”和“模块化”的编队设计思想相结合,给出了一种通过智能体群组规律运动构造鲁棒图的编队控制方法,其中鲁棒性的大小可量化.有别于文献[26–27],本文所提方法中智能体的闭环运动路径不受结构、形状等约束.此外,在构造具有相同鲁棒性的网络所需的时间方面,该方法优于文献[22]中的方法.
2 预备知识
2.1 图论
考虑由n个智能体组成的多智能体系统,整个系统的通信图可抽象为一无向图G[t]=(V,E[t])表示.其中,V={1,2,···,n}表示节点集,E[t]⊆V ×V表示在t时刻的边集.节点i在t时刻的邻居集用Ni[t]={j|(i,j)∈E[t]}表示.基于上述图论知识,本文引入下述定义.
定义1(r–可达集[9]) 对于某一子集S ⊂V,如果S中存在一个节点i,节点i至少含有r个不属于子集S的邻居时,那么称S为r–可达集.即存在i ∈S使得|NiS|≥r,其中r ∈Z≥1.
定义2(r–鲁棒图[9]) 对于某一无向图G,如果G中的任意一对非空不相交子集S1,S2中至少存在一个子集为r–可达集,则称G为r–鲁棒图,其中|S1|>0,|S2|>0,S1∩S2=∅,r ∈Z≥1.
定义3(r–强鲁棒图[28]) 对于一个图G,如果G中的任意一个非空子集S是r–可达集或存在节点i∈S,使得V S ⊆Ni,那么称图G为r–强鲁棒图,其中.
本文考虑时变网络,即节点间的通信链路会随着节点的位置移动而发生变化.此处引入文献[29]中联合图相关的定义,具体如下:
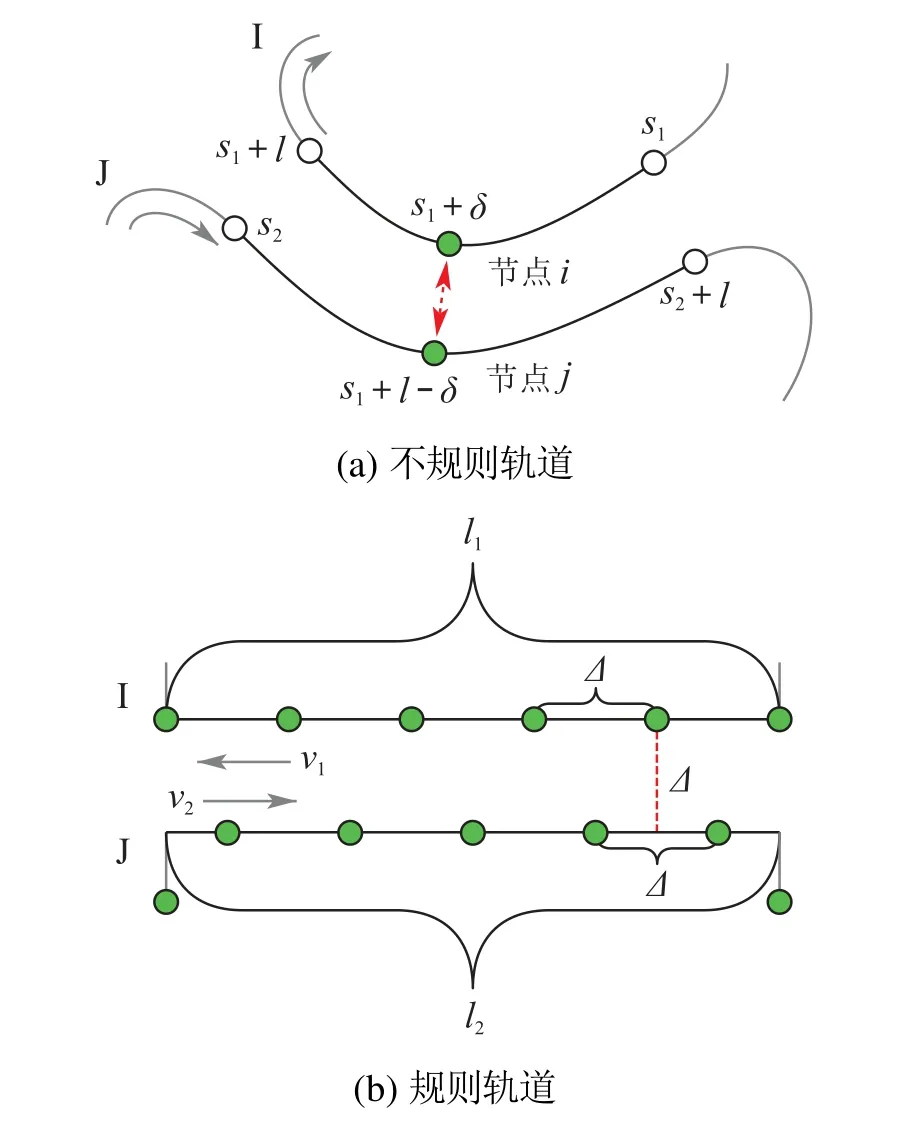
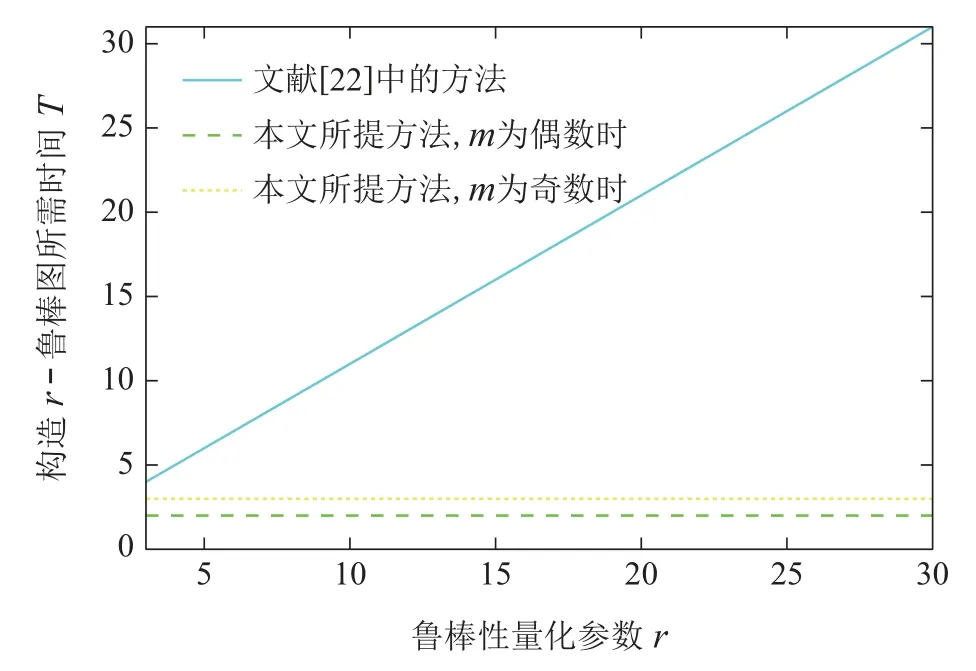
定义4(T–联合图[22]) 对于一个时间周期T,令GT[t]表示在时间间隔[t −T,t]上G[t]的并集,即,其中0 定义5((T,r)–(强)鲁棒图) 对于一个时间周期T,如果GT[t]在任意时刻t的通信图均满足r–(强)鲁棒图,则称GT[t]为(T,r)–(强)鲁棒图,其中r∈Z≥1,0 考虑由n个节点组成的多智能体系统,系统中的节点由常规节点和恶意节点两类节点组成.文中用VN表示常规节点的集合,用VM表示恶意节点的集合,有VN ∪VM=V,VN ∩VM=∅.每个常规节点的动态更新方程为 其中:xi[t]表示节点i在t时刻的状态值,ui[t]是待设计控制策略.随着时间的迭代,当系统中所有常规节点的状态值趋于一个相同的值xa时,则称该多智能体系统实现了状态值趋同,即 定义6(弹性(均值)趋同[29]) 考虑多智能体系统(1),若系统同时满足以下两个条件时,则称其实现了弹性(均值)趋同: 1) 弹性条件:存在一个集合S ⊆[m[0],M[0]],使得任意一个常规节点i,满足:xi[t]∈S,i ∈VN,t ∈Z≥0. 2) 趋同条件:所有常规节点的状态值随着时间的变化趋于一致,即任意一个常规节点i的状态值满足:,i ∈VN.在弹性均值趋同中,该相同值为所有常规节点的初始状态值的算术平均值,即 考虑到攻击者有限资源如计算力、能量消耗等对其攻击能力的限制,可以对网络中恶意节点的数目上界进行一个合理的假设.近年来在众多研究弹性趋同问题的文献中,一种常见的攻击假设模型为f–局部攻击模型[9].结合定义4,进一步提出适用于移动网络的(T,f)–局部攻击模型的定义. 定义7((T,f)–局部攻击模型) 对于一个时间周期T,如果联合图GT[t]中任意节点i的邻居集中最多存在f个恶意节点,记该模型为(T,f)–局部攻击模型.即对于任意i ∈V,|Ni[t]∩VM[t]|≤f. 在文献[22]中,作者提出了一种称为滑动窗口加权均值子序列缩减(sliding weighted mean-subsequence-reduced,SW–MSR)的分布式弹性趋同算法.在SW–MSR算法中,每个节点自身维护一个T步长的窗口,以记录T时间内从邻居节点收到的状态值.算法在每个t′=kT时刻触发,执行以下3个步骤:1)每个常规节点i在时间间隔T内累计接收邻居集发来的信息,随后根据接收到的状态值创建一个有序的列表;2)节点i将自身状态值xi[t′]与列表中的数据进行比较,若列表中比xi[t′]值大的数据个数大于或等于f个,则删去列表中最大的f个数,若列表中比xi[t′]大的数据个数少于f个,则就把上述比xi[t′]大的数据全部移除.类似地,对于比xi[t′]小的数据也应用同样的方式进行处理.此时将列表中剩余的数值用集合Ri[t′]表示;3)随后,节点i采用以下规则更新自身状态: 其中w[t′]>0,wii[t′]+∑wij[t′]=1,τ是时间戳.作者在文中证明了在(T,f)–局部攻击模型下,如果多智能体系统的通信图满足(T,2f+1)–鲁棒图,且每个常规节点采用上述SW–MSR算法更新自身的状态值,系统最终能够实现状态值趋同. 上述SW–MSR算法中,每个节点各自完成数据的处理过程,节点间交互的状态值信息则依托在建立连通性的流量中,此外无需其他额外开销,因此,SW–MSR属于一种较为轻量级的分布式算法.考虑极端的情况,对于某一常规节点,其在执行SW–MSR算法过程中至多会移除2f个邻居节点传来的值,因此为保证移除数据后的网络仍具备连通性,原始的拓扑图必须为一个2f+1–鲁棒图.SW–MSR算法本质上排除了偏离自身状态值较大的邻居值,保证与自身值相近的邻居状态值参与数据处理过程.SW–MSR算法的缺点是收敛速度较慢,且会随着鲁棒性参数r值的增加而呈线性增长.因此不宜确定实际环境中网络实现趋同所需的切确时间[14]. 受文献[22,28]启发,本文提出一种称为T–安全接收与广播的弹性均值趋同算法(T–secure acceptance and broadcasting algorithm,T–SABA).相较于文献[22]中的方法,本方法在状态值趋同方面耗时更低,趋同后状态值的精度更高,两种算法性能的对比实验详见第6节6(b)–6(c).首先,每个常规节点i创建一个数组,记,以记录接收到的其他节点的状态值,其中N¯表示网络中节点数量的上限,表示节点i的数组中记录t时刻接收到节点j的状态值,显然有.不考虑通信时延的存在,每个常规节点在时刻t同时发送和接受与时刻t −τ相关的数据分组.当t≤T时,节点i向邻居广播数组mi[0](此时每个数组只记录了自身的初始状态值xi[0]),同时接收邻居节点的信息mj[0]并存入数组,以更新数组mi[t]中的值,其中i ∈VN,j ∈Ni[t −τ],τ是采样时长,T=kτ,k ∈Z≥0.当t>T时,每个常规节点i向其邻居广播数组mi[t −τ].如果一个常规节点i从超过f+1个邻居节点j中收到关于节点d的状态值描述相同时,节点i就接收这个值并记录在数组.重复上述过程,直至更新结束.此时节点i的数组中将记录网络中所有节点的初始状态值,即.算法1给出了T–SABA主要过程的伪代码. T–SABA算法保证了每个常规节点i维护的数组mi中记录了所有节点的初始状态值,为之后系统实现均值趋同提供了前提保障.记节点i在t时刻前收到的初始状态值的平均值为: 其中Mi[t]是数组mi[t]中非空元素的索引集合,其基数由λ[t]=|Mi[t]|给出.为了处理状态更新过程中可能存在的波动,常规节点i利用如下低通滤波器更新其状态值: 其中:0<ϵi <1.ϵi的大小可以决定节点的动态特性对状态值瞬时变化的敏感性[30]. 定理1在(T,f)–局部攻击模型下,如果多智能体系统(1)的通信图G[t]满足(T,2f+1)–强鲁棒图,那么系统中所有常规节点i ∈VN在执行至多N −2轮T–SABA算法后,实现弹性均值趋同. 这一节给出基于“小组化”和“模块化”相结合思想的智能体群组编队运动方法.群组编队的目的是通过智能体节点在模块上按照预定的策略运动,使得相应的联合图达成特定的(T,r)–(强)鲁棒性. 为便于读者理解,图1给出了由5个节点为一组的智能体群组编队运动示意图.图中,在初始时刻令每个智能体按序依次排布,相邻智能体在模块上的弧长距离相同.多智能体系统被划分成多个小组,每个小组首尾相接.图1(a)是针对单模块上多智能体编队的示例方案,其中总计25个节点,分成5组,每组5个节点.图1(b)是针对多模块上多智能体编队的设计方案示例. 图1 智能体群组编队运动示意图Fig.1 Schematic diagram of agent group formation movement 为了便于描述智能体群组组内与组间的网络通信状况,给出如下定义. 定义8(p–组内全连通) 考虑一个模块I上的任意一个小组g,小组g中节点数量为p,若由这p个节点构成的拓扑图是全连通的,称小组g是p−组内全连通的,其中p ∈Z≥0. 定义9(s–组间全连通) 考虑一个模块I上的所有小组,每个小组g的前s个节点与其邻接的前一小组中的最后s个节点构成的拓扑图是全连通的;同样,小组g的后s个节点与其邻接的后一小组中的前s个节点构成的拓扑图也是全连通的,称模块I是s–组间全连通的,其中s ∈Z≥0. 引理1考虑一个模块I上的任意一个小组g,如果小组g是p–组内全连通的,那么小组g中全部节点构成的拓扑图,记Gg=(Vg,Eg),是强鲁棒的. 注1根据本文多智能体群组编队策略,以及定理2和推论1可以看出,通过合理设置s和p的数值,可有效调整相应网络的鲁棒性大小. 记节点的通信范围为R,节点所处的位置为γ.考虑相邻模块I和J上的节点i和j.如图2(a)所示,如果在某个时刻,节点i和j都处于对方的通信范围内,那么此时节点i可以与节点j发生通信,产生通信边,即拓扑图G的边集由ER={(i,j)|‖γi −γj‖≤R}给出.如果至少存在一对这样的节点分别位于模块I和模块J上,称模块I与模块J邻接.本节将给出实现模块间的状态值趋同并量化邻接模块间连通度大小的具体方法. 图2 相邻模块间的节点交互示意图Fig.2 Schematic diagram of node interaction betweenadjacent modules 定义11(接口区域[27]) 结合图2(a)中所示,考虑邻接模块I和J上分别存在的区域I1=[s1,s1+l]和J1=[s2,s2+l].如果对于所有δ ∈[0,l],满足‖γi(s1+δ)−γj(s2+l −δ)‖≤R,称区域I1和J1是邻接模块I和J上的接口区域. 定义12(接口索引[27]) 模块I上的节点i对模块J的接口索引是指模块J上能与节点i相互通信的节点的数量,记为Di(J).模块I对模块J的接口索引记为DI(J),其中DI(J)=min{Di(J)},i ∈VI. 定义13(q–模块间连通) 对于邻接模块I和J,若DI(J)=DJ(I)≥q,称模块I和J是q–模块间连通的,其中q ∈Z≥0. 引理2在(T,f)–局部攻击下,如果模块图G[t]中常规节点通过SW–MSR或T–SABA协议更新自身状态值,那么系统实现弹性趋同的必要条件是G[t]至少是(T,f+1)–(强)鲁棒的. 证采用反证法证明.假设模块图G[t]不满足(T,f+1)–(强)鲁棒,此时考虑极端情况,存在两个不相交的子集,不妨表示为S1和S2,上述两个集合包含的任意一个节点均未满足f+1–可达,即|NiS1| 定理3在(T,f)–局部攻击下,当所有常规节点遵循T–SABA或SW–MSR协议时,对于具有p–组内全连通,s–组间全连通和q–模块间连通的两个相同的模块I和J,当满足s>f,q >f时,模块上任意一个小组g的扩增图是强鲁棒的.模块I和J上的全部节点构成的模块图G[t]能实现弹性趋同,其中 近年来,随着移动互联网、电子商务的快速发展和普及,物流业务迎来了新一轮的发展浪潮。在国家《物流业发展中长期规划(2014-2020年)》中明确提出了“进一步加强物流信息化建设等要求。”物流园区作为物流业务环节中最重要的载体,其信息化发展水平直接影响着物流运转效率,加强智慧园区的建设已然成为物流园区和物流企业实现创新转型的必由之路。因此,以智慧物流园区顶层规划为引领,通过总包业务开展智慧物流园区的建设,突出信息化项目的可持续性运营,探索更加科学、高效的智慧物流园区建设新路径。 证在给定的网络条件下,由定理2可知,模块上任意小组g的扩增图是强鲁棒的.由推论1可知,s>f是单个模块上全部节点构成的图实现弹性趋同的必要条件.记模块I中的全部节点VI构成的图为GI,模块J中的全部节点VJ构成的图为GJ.再根据引理2可知,模块图G[t]实现弹性趋同的必要条件是GI中至少存在一个节点i,其至少有f+1个邻居属于VJ,同时,图GJ中至少存在一个节点j,其至少有f+1个邻居属于VI,即|Ni ∩VJ|≥f+1,|Nj ∩VI|≥f+1.因此s>f,q >f是保证邻接模块中全部节点构成的模块图G[t]实现弹性趋同的必要条件. 证毕. 接下来,考虑模块形状的一般性,进一步量化Di(J). 定理4结合图2(b)中所示,考虑任意两个邻接模块I和J,接口区域的长度分别为l1和l2,假设两个模块中的节点分别以v1和v2匀速运动,单个模块中节点间的弧长距离、模块I和J之间的距离以及每个节点的通信范围均为Δ.则模块I上的任意一个节点i的接口索引Di(J)满足 证当模块I上的一个节点i经过接口区域时,它会与邻接模块J上的部分节点发生通信.这段时间内,模块J上的节点运行的路程,故在这段时间内会有 个节点出现在模块J上的接口区域.因此节点i会周期性得与模块J上至少个节点通信. 证毕. 由式(8)可知,若邻接模块I和J应用的运动策略相同,且接口区域的长度相同时,即v1=v2,l1=l2,那么有.若同一模块中节点的移动速度不同,DI(J)则取自模块中运动速度最小的节点. 借助第4节所提的理论知识,这一节提出一种基于选择性激活通信链路的控制策略,用于构建一个满足(T,r)–强鲁棒图的时变网络. 本小节提出一种针对移动智能体群组的周期性聚集方法(periodic cluster method,PCM).具体地,以小组内的所有智能体为一个小群组,相邻群组间的部分节点作为另一个小群组,每个群组中的智能体会在某一时间内聚集在某个位置,使得群组中任意两个智能体之间可以相互通信,由此构建全连通的拓扑网络. 令智能体的编号沿着运动路径递增,每个智能体的通信范围恰好能与其相邻的两个智能体相互通信,如图3(a)所示.记I是一个群组从聚集到恢复成初始队列所需时间的最小上界.在每一个I时长的间隙中重新配置新的群组的跟随者(普通智能体)与领导者(群组中的成员以领导者为基准,在一定的时间内向它靠拢),实现聚集后再恢复队列.如图3所示,模块上的16个智能体分成4组,每组4个.在每一个周期中,第一次聚集发生在小组内部,小组内的跟随者向领导者靠拢,完成一次短暂的通信后恢复成原来的队列,如图3(b)所示.之后的聚类发生在小组与小组之间.为了保证所有相邻小组间的智能体构造具有组间全连通性质的拓扑图,需要进行多次聚类,如图3(c)–3(d). 图3 PCM示意图(绿色节点代表跟随者,橙色节点代表领导者)Fig.3 Schematic diagram of PCM(The green node represents the follower,the orange node represents the leader) 1) 量化构建具有定理2描述性质的周期性时变图需要的时间,记为周期T.不妨设一个模块中的智能体数量为n=pm,其中m代表模块内小组的数量,m ∈Z≥2. 若m是偶数,实现一次组内全连通需要I时长,相邻小组之间实现一次组间全连通需要2I时长,由于,无法在一个I时长里完成所有小组的组间全连通;若m是奇数,若只用2I时长来实现所有小组的组间全连通目标,会存在一对特殊的相邻小组,他们之间没有实现组间全连通,故需要额外的一个I时长.综上, 2) 实现一个模块上组内全连通时的领导者与跟随者选取规则(假设选取每个群组中处于中间位置的智能体作为领导者).那么领导者集合为 每一个领导者对应的跟随者集合为 3) 实现一个模块上组间全连通时的领导者与跟随者选取规则(同样以每个群组中处于中间位置的智能体作为领导者).若m是偶数,所有群组实现组间全连通,需要2I时长.如图3(c)–3(d). 在第d个I时间里(d=1或2),领导者集合为 每一个领导者对应的跟随者集为 若m是奇数,依据等式(9),需增设一个I时长.其中领导者集为Vm={mp},跟随者集为 4) 量化I.假设不参与聚集的智能体和领导者沿轨道匀速运动的速度为v,需要减速靠近领导者或减速远离领导者的智能体运动速度为v1.需要加速靠近领导者或加速远离领导者的智能体运动速度为v2,其中v2−v=v −v1.在每一个I时长里,群组从开始聚集任务到最远的智能体也靠拢到领导者的附近后立即开始恢复队列的工作.恢复完成后,所有智能体保持速度v匀速运动.由于小组之间聚集时的群组中智能体数量较多,I的最小上界受此影响.此时群组中的领导者与最远跟随者之间的距离为 相比于文献[18,22,27],本文所提方法对模块图的形状不施加约束,且易于扩展,在构造相应鲁棒图时所需时间更少.图4所示的仿真实验展示了本文所提方法与以文献[22]为代表的传统方法的性能表现.从实验中可以看出,以文献[22]为代表的传统方法在构造鲁棒图时,其消耗的时间随着参数r的增加而呈线性增长,而本文所提的方法所消耗的时间为一固定值,少于文献[22]中所消耗时间,且不受参数r影响. 图4 本文所提方法与文献[22]为代表的方法在构造具有相同鲁棒性的拓扑图时所用时间T对比图Fig.4 The comparison diagram of time T taken by the method proposed in this paper and literature [22] to construct topology with the same robustness 根据前面的分析,当多个相互邻接模块间的接口索引足够大时,智能体群组构造的网络能够达成所需的鲁棒图要求,并在所提算法下实现弹性(均值)趋同.本小节展示了一些具体应用实例.在图5(a)中,多个相同的模块按照预定的方式排布以覆盖和监管一片区域,例如区域性监控,数据采集等;图5(b)和5(c)展示了形状不规则模块的应用方案,适用于智能体沿预定的路线或避开障碍物运动等场景,例如森林外围监管等;图5(d)指出可以自定义模块结构的设计,以突出对特殊区域的监管. 图5 几类实际应用示例图Fig.5 Examples of several types of practical applications 根据恶意节点在网络中的分布,考虑图6中的6种分布情况.图中的常规节点(绿点)遵循SW–MSR或T–SABA协议更新自身状态值.假设在首轮数据交互过后,恶意节点(红点)开始向链路中发送虚假数据以试图影响系统的趋同进程.图7是仿真实验的结果图. 图6 实验中恶意节点分布位置示意图Fig.6 The distribution location of malicious nodes in experiments 图7 仿真结果图Fig.7 Simulation result graph 图7(a)中的实验以图6(a)中的网络结构为基础,具有5–组内连通度和1–组间连通度的时变拓扑图无法抵抗1个恶意节点的攻击;图7(b)–6(c)中的对比实验以图6(b)中的网络结构为基础,T–SABA和SW–MSR算法都能成功抵抗具有5–组内连通度和3–组间连通度的时变拓扑图中2个恶意节点的攻击;图7(d)中的实验以图6(c)中的网络结构为基础,具有5–组内连通度和1–组间连通度的时变拓扑图无法抵抗3个恶意节点;图6(e)中的实验以图6(d)中的网络结构为基础,具有5–组内连通度和3–组间连通度的时变拓扑图可以抵抗2–局部攻击;图7(f)中的实验以图6(c)中的网络结构为基础,具有5–组内连通度和4–组间连通度的时变拓扑图可以抵抗3个恶意节点;在图7(g)的实验中模拟了具有5–组内连通度、4–组间连通度和3–模块间连通的时变拓扑图无法抵抗3个恶意节点;图7(h)中的实验以图6(e)中的网络结构为基础,具有5–组内连通度、4–组间连通度和4–模块间连通的时变拓扑图可以抵抗3个恶意节点;图7(i)中的实验以图7(f)中的网络结构为基础,具有5–组内连通度、4–组间连通度和4–模块间连通的时变拓扑图可以抵抗3–局部攻击. 图7(a)(d)中的实验结果说明如果时变拓扑图不满足推论1的要求,虽然每个小组中的节点的状态值最终能实现趋同,但整个模块上全部节点的状态值无法趋同,这是因为小组间的网络鲁棒性不满足弹性趋同条件(s 本文考虑了网络攻击下多智能体系统弹性均值趋同控制器的设计与分析问题,并讨论了通信范围有限的移动智能体群组运动中的r–(强)鲁棒网络构造问题.针对f–局部有界攻击模型,提出了一种分布式T–SABA弹性均值趋同控制方法,所提方法相比于传统MSR方法达成状态趋同所需的时间更少.随后,通过对智能体进行分组,提出了一种适用于群组移动智能体的周期性聚集运动策略,在该运动策略下可以使系统中节点生成的联合图达成特定的鲁棒性.最后,通过对网络攻击下多智能体系统的弹性均值趋同问题进行数值仿真,验证了所得结论的正确性.2.2 多智能体系统趋同


2.3 攻击模型
3 算法设计和分析
3.1 弹性趋同

3.2 弹性均值趋同



4 智能体群组(T,r)–鲁棒编队

4.1 组内与组间编队设计


4.2 模块间编队设计

5 编队策略与应用设计
5.1 群组智能体编队策略








5.2 应用场景设计

6 仿真




7 总结
猜你喜欢
河南科技学院学报(自然科学版)(2020年2期)2020-05-22小型微型计算机系统(2020年5期)2020-05-14实用妇科内分泌杂志(电子版)(2020年2期)2020-04-17火力与指挥控制(2020年1期)2020-03-27网络安全技术与应用(2019年5期)2019-06-05World Journal of Diabetes(2019年3期)2019-04-16家庭百事通·健康一点通(2018年4期)2018-05-16科学中国人(2015年32期)2015-06-09
