
悬挂农具对拖拉机转向乘坐舒适性的影响
2021-08-13 01:26陈普双倪伟强吴赛飞尚莉丽许良元
安徽农业大学学报 2021年3期
陈普双,倪伟强,吴赛飞,尚莉丽,许良元,2*,杨 洋,2,江 庆,2
悬挂农具对拖拉机转向乘坐舒适性的影响
陈普双1,倪伟强1,吴赛飞1,尚莉丽1,许良元1,2*,杨 洋1,2,江 庆1,2
(1. 安徽农业大学工学院,合肥 230036;2. 安徽省智能农机装备工程实验室,合肥 230036)
以某型拖拉机和深松机为研究对象,在UG中建立拖拉机和农具的三维模型并导入ADAMS中,建立人-机-路面的虚拟样机模型,对农具质量和悬挂位置在拖拉机转向过程中驾驶员乘坐舒适性的影响进行了研究。结果表明:在拖拉机空载和悬挂农具质量为300 kg、600 kg和900 kg的情况下,拖拉机驾驶员的联合加权加速度均方根值为 0.434、0.474、0.566和0.629 m·s-2;在拖拉机悬挂农具内提升臂和水平方向夹角从20 °提升到45 °、70 °的情况下,拖拉机驾驶员的联合加权加速度均方根值为0.710、0.629和0.558 m·s-2,悬挂农具的质量越大,农具的悬挂角度越小,驾驶员的联合加权加速度均方根值越大,驾驶员越不舒服。该研究为后期的拖拉机的减振设计提供了重要参考。
拖拉机;农具;振动;转向;舒适性
拖拉机是我国农业作业中最重要的农业机械之一,也是生产生活中必不可少的农业机械。在我国,拖拉机年平均工作量中80 %是用作运输的[1],并且拖拉机应用较多的地区通常是农村乡下,道路不平整。悬挂农具的拖拉机在乡间道路行驶时,特别是在转向过程中,极易引发事故[2-5]。
拖拉机的剧烈振动对于驾驶员健康危害很大,驾驶员的乘坐舒适性已经日益引起国内外研究人员的关注[6-11]。薛金林等[12]对于拖拉机前轮的胎压和拖拉机行驶速度对于横向振动的关系进行了研究。徐刚等[13]分析国产100种拖拉机参数,建立了振动系统的模型,并对拖拉机垂向振动、俯仰振动和倾侧振动的固有频率进行了研究。顾林等[14]建立了ADAMS虚拟样机模型,并对拖拉机的空间振动进行了研究。Mastrigt等[15]对于主动座椅对人的舒适度影响进行了研究。Villibor等[16]研究了农业作业中拖拉机前后轴的振动的影响。Gialamas等[17]对于拖拉机耕作过程的振动进行了分析。
国内外对于拖拉机行驶乘坐舒适性的研究主要集中于直线行驶过程,对于拖拉机转向过程中的振动分析较少,本研究以拖拉机和深松机为研究对象,建立驾驶员-拖拉机-路面的ADAMS虚拟样机模型,结合舒适性评价标准,对农具质量和位置对于拖拉机转向过程中驾驶员乘坐舒适性的影响进行分 析[18-21]。旨在为拖拉机的减振系统设计和安全驾驶提供一定参考。
1 材料与方法
1.1 拖拉机虚拟样机模型的建立
拖拉机的振动是一个十分复杂的多自由度系统,转向行驶过程的振动剧烈程度与发动机振动情况、行进的速度、悬挂农具的质量和位置、路面平整程度等因素有关。拖拉机的振动情况可以简单的分成纵向、横向、垂向振动和倾侧、俯仰、横摆振动。拖拉机的主要参数见表1。

表1 拖拉机主要参数
根据拖拉机的参数在UG中建立简化的拖拉机三维模型,在确保农具和拖拉机的质心、质量以及各个构件装配位置准确的条件下,进行了部分简化建模,由于整机悬架部分和悬挂农具的刚性比较大,可以将整机和农具简化成完整的刚体结构;悬挂机构可以简化成杆件结构;人体简化为一个质量块固定在座椅上;完成整机模型的建立,建立悬挂农具的三维模型,将深松机模型装配在拖拉机整机模型上,建立拖拉机-悬挂农具模型如下图1所示。
拖拉机的轮胎是振动系统中的柔体,是拖拉机整机减振部件。建立拖拉机轮胎的模型,轮胎的主要参数刚度和阻尼简化为一个弹簧和阻尼器并联的结构。轮胎模型采用的是ADAMS轮胎模型中的Fiala轮胎模型,通过设置相关的轮胎参数,可以在ADAMS中直接导出Fiala的轮胎模型。
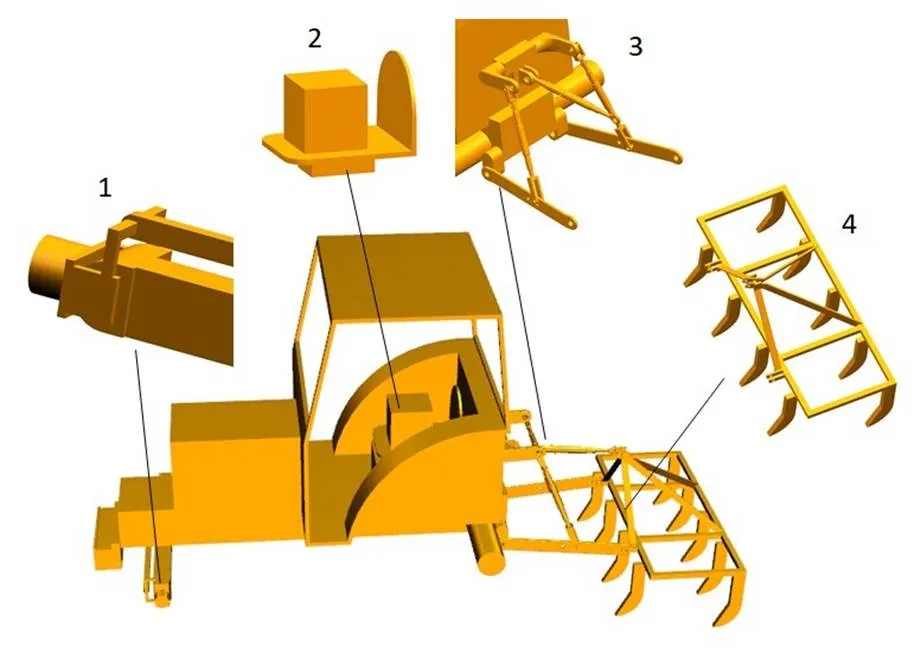
1. 转向机构; 2. 人-座椅模型; 3. 悬挂机构; 4. 深松农具。
Figure 1 Tractor - model of hanging farm tools.
根据轮胎的充气压力、轮胎宽度、轮辋半径和使用年限相关参数,通过公式(1)-(4)计算出拖拉机前后轮的径向刚度和径向阻尼:
=172–69.69+5.6+0.527Krp(1)
式中:—轮胎径向刚度,kN·m-1;—轮辋半径,m;—使用年限,a;w—轮胎宽度,m;—轮胎气压,Pa。
=0+0.7(2)
式中—轮胎径向阻尼,kN·s· m-1;C—0气压状态下轮胎径向阻尼,kN·s· m-1。


式中:1,2—侧向、纵向刚度,N·(º)-1;1,2—侧偏、滑移刚度,N·rad-1;1,2—轮胎自由长度,m;1—轮胎动力半径,m。
根据上述公式计算,得到前后轮胎的属性参数,如表2所示。
在研究拖拉机行驶的振动时,路面的平整程度将直接影响拖拉机行驶过程中振动的剧烈程度。ADAMS可以通过后缀名rdf的路面文件导入到仿真环境中。根据GB/T 7031-1986的标准[22],规定随机路面的等级分成A-H合计8个等级,利用正弦波叠加的原理在MATLAB中建立随机路面的过程如下:



表2 轮胎属性参数

式中—路面的纵向位置;ω—[0,2π]内的随机数。
设定随机路面的纵向坐标、横向坐标,得到:

式中(,)—路面上任意点(,)的路面高度;
ω(,)—路面上任意点(,)属于[0,2π]间的随机数。
本研究选择使用的是D级随机路面,根据标准规定的D级路面参数在MATLAB建立随机路面如图2所示。
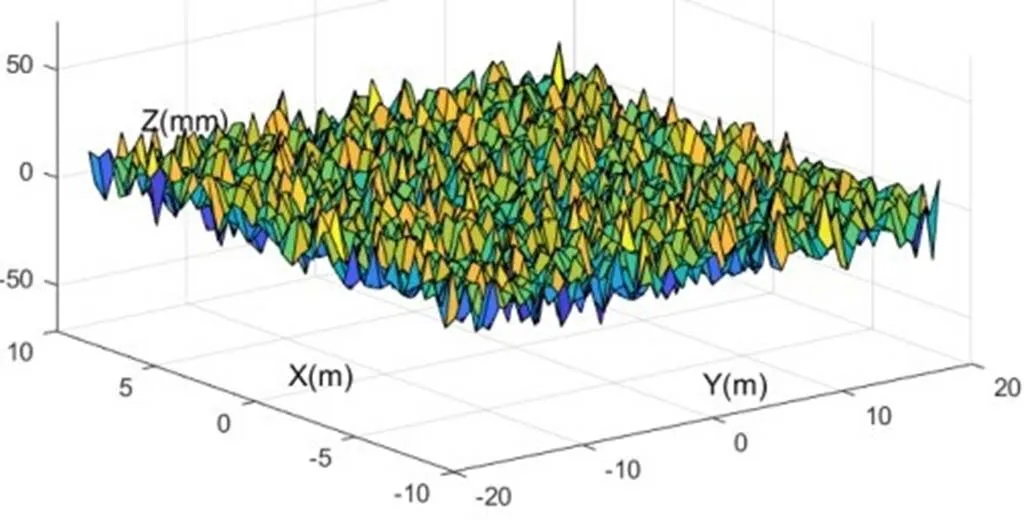
图2 随机路面
Figure 2 The random road
将农具和拖拉机简化模型、轮胎模型以及随机路面导入ADAMS/View模块,设置各个部件质量特性,根据各部件之间关系,添加相关约束,在拖拉机和座椅连接处添加弹簧阻尼,建立座椅减振系统,在拖拉机轮胎处创建轮胎转速的控制驱动,在前轮的转向机构处创建拖拉机转向角的控制驱动,在悬挂装置提升臂上创建悬挂农具提升角度的控制驱动,ADAMS中完成人-机-路面系统虚拟样机模型和悬挂机构位置关系如图3所示。

图3 虚拟样机模型
Figure 3 Virtual prototype model
1.2 悬挂农具最大质量的确定
根据GB/T 10911-2003标准[23],为了保证拖拉机的安全行驶,根据拖拉机的前轴静载荷和最小使用质量计算的悬挂农具的最大质量:
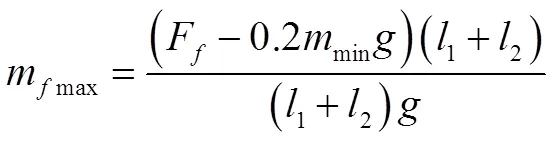
式中: F—前轴静载荷,N;min—拖拉机最小使用质量,kg。
根据拖拉机后轮最大载荷确定的农具最大质量:
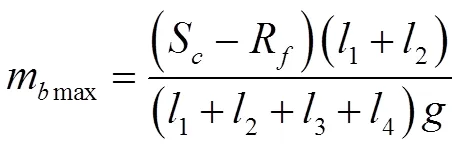
式中S—后轮最大载荷,N;R—后轮的静态载荷,N。
根据悬挂装置的最大提升力确定农具的最大质量:
式中P—工作压力,MPa;max—最大速比;—机械效率;—缸筒直径,mm。
将拖拉机参数代入式中,计算得到拖拉机允许悬挂的农具最大质量约为900 kg。
1.3 拖拉机乘坐舒适性的评价标准
人体振动舒适性的评价方法采用的是GB/T 13441.1-2007中规定的方法[24],此方法是目前应用最为广泛的一种评价方法,根据 X、Y、Z轴向的振动对人体振动舒适性的影响进行分析评价,
根据GB/T 13441.1-2007标准[24],采用加权加速度均方根值对拖拉机舒适性进行分析评价,驾驶员全身联合加速度均方根值评价拖拉机行驶平顺性。驾驶员全身联合加速度均方根值a与人主观感受之间的关系如下表3所示。
对于试验得到的加速度时域图进行傅里叶变换处理,得到加速度功率谱密度函数,对于加速度功率谱密度函数进行频率加权处理,得到单向频率加权加速度均方根值。

表3 aw与人主观感受之间的关系

表4 1/3倍频程加权因子

式中:() —频率加权函数;G() —加速度功率谱密度函数。
根据国标 GB/T 8421-2000[25],频率加权有3种方法实现:等带宽法、1/3 倍频程带宽法和宽频带法。本研究采用 1/3 倍频程带宽法实现频率的加权,根据中心频率,分析每个 1/3 倍频的加速度分量,规定采样时间内的平均值。1/3 倍频程加权因子如表4所示。
计算驾驶员全身联合加速度均方根值:

式中a、a和a是 X、Y和Z方向的频率加权加速度均方根值,m·s-2。
1.4 试验器材安装
以某型拖拉机和深松机为试验对象,组合惯导系统安装在质心位置,北斗/GPS天线安装在拖拉机后视镜处,4个单向传感器安装在拖拉机前桥和后桥两侧,三向加速度传感器安装在拖拉机座椅安装处,使用蓄电池为传感器提供恒流电源,通过数据采集卡采集垂加速度数据。仪器安装位置如图4所示。
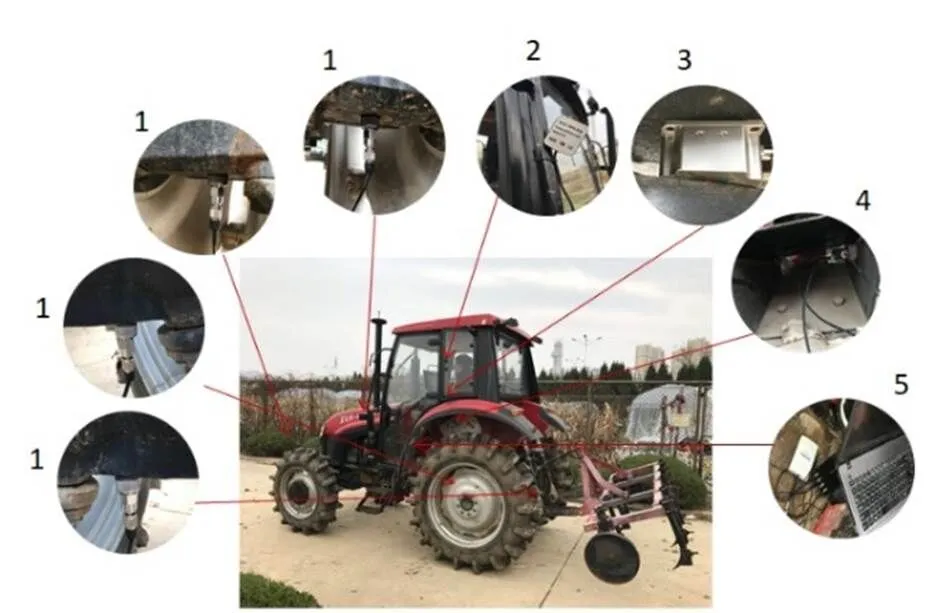
1. 单向加速度传感器; 2. 北斗/GPS天线; 3. 组合惯导系统; 4. 三向加速度传感器; 5. NI数据采集卡。
Figure 4 Instrument installation location
2 结果与分析
2.1 拖拉机振动系统的仿真和试验验证
在ADAMS中对于虚拟样机模型进行转向振动特性的仿真,选择D级随机路面长度35 m,拖拉机行驶速度为4 km·h-1,拖拉机的转向角度为30°,悬挂装置内提升臂和水平方向夹角提升到最大,仿真试验重复进行3次,取3次仿真结果的平均值。

表5 试验与仿真结果对比
实地试验的地点是安徽农业大学机电园,选择的地况与仿真地面基本一致,拖拉机行驶速度为4 km·h-1,转向角度为30°,悬挂装置内提升臂和水平方向夹角提升到最大。实地试验重复进行3次,取3次试验结果的平均值。数据对比见表5。
从表5结果对比可以得到:在转向角度为30°,悬挂装置和水平方向夹角提升到最大时,拖拉机前后桥两侧的加速度均方根值和座椅安装处的联合加速度均方根值的相对误差分别为9.38 %、9.68 %、6.90 %、7.14 %和9.18 %,仿真和试验结果基本一致,可以满足接下来的试验研究。

(a) 拖拉机空载驾驶员振动加速度;(b) 拖拉机悬挂农具300 kg时驾驶员振动加速度;(c) 拖拉机悬挂农具600 kg时驾驶员振动加速度;(d) 拖拉机悬挂农具900 kg时驾驶员振动加速度。
Figure 5 Time domain diagram of the driver's vibration acceleration
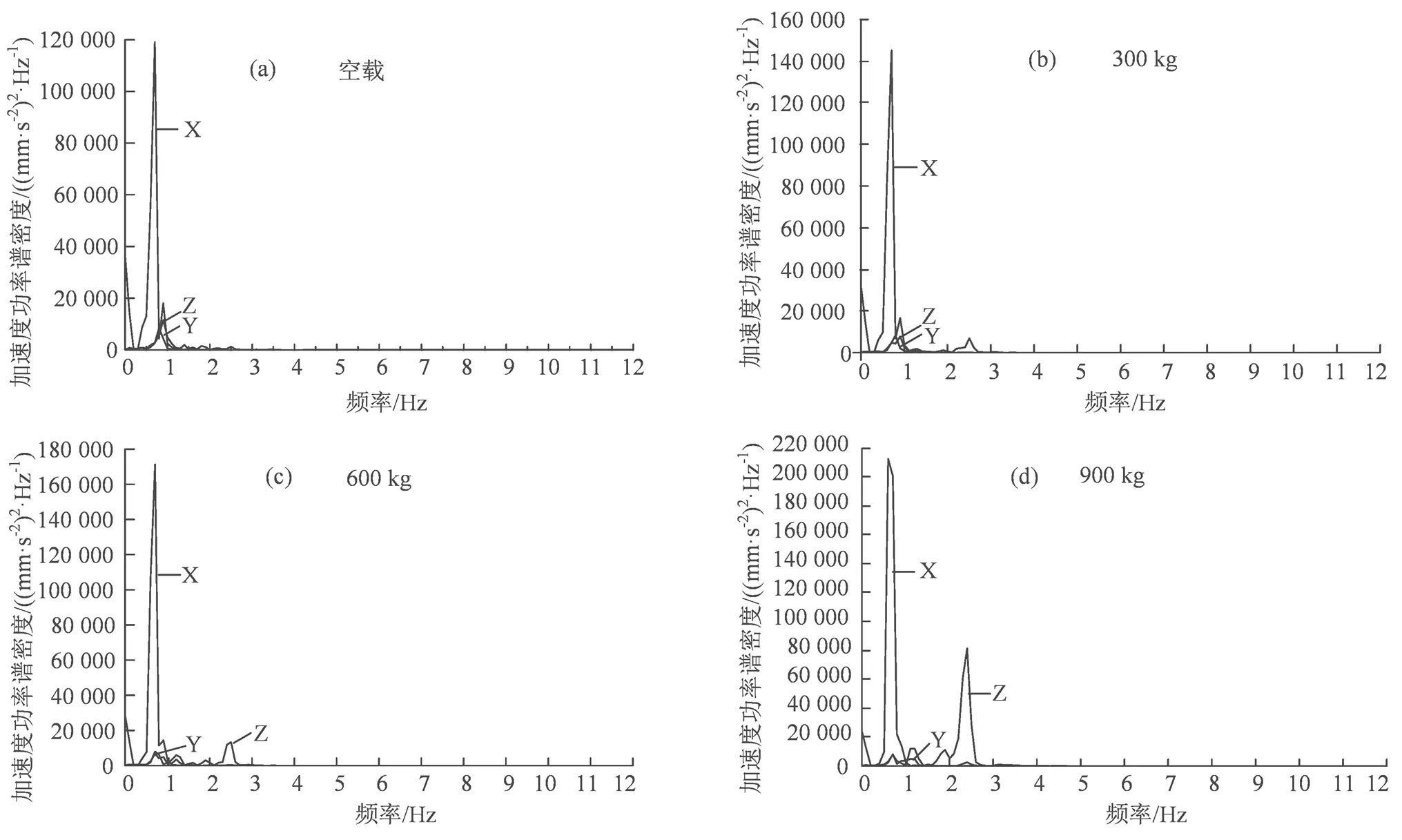
(a) 拖拉机空载驾驶员振动加速度功率谱密度;(b) 拖拉机悬挂农具300 kg时驾驶员振动加速度功率谱密度;(c) 拖拉机悬挂农具600 kg时驾驶员振动加速度功率谱密度;(d) 拖拉机悬挂农具900 kg时驾驶员振动加速度功率谱密度。
Figure 6 Power spectral density diagram of the driver's vibration acceleration

图7 驾驶员全身振动联合加权加速度均方根值
Figure 7 RMS of the whole body weighted acceleration.
2.2 农具质量对拖拉机转向乘坐舒适性的影响
对拖拉机虚拟样机模型进行转向振动进行仿真,根据选择D级随机路面长度35 m,拖拉机行驶速度为4 km·h-1。拖拉机前轮转向角为12°,悬挂装置内提升臂和水平方向夹角为45°,农具选取0 kg、300 kg、600 kg和900 kg 4组不同质量等级。仿真过程设计为:0~5 s拖拉机静止,5~7 s拖拉机加速到4 km·h-1,7~9秒前轮转向12°,9 s后拖拉机进入转向行驶状态。考虑到仿真初始阶段,拖拉机处于不稳定状态,本研究截取了10 s后匀速阶段的振动信号进行分析处理。仿真得出4组不同情况下驾驶员质心的振动加速度时域波形图,如图5所示,X、Y、Z 分别表示驾驶员在3个轴向的加速度。
从图中可以分析出:随着农具质量的增大,驾驶员在 X、Y、Z 3个方向的振动加速度变大。在ADAMS软件后处理模块中通过傅里叶变换得到驾驶员质心加速度功率谱密度如图6所示。
根据GB/T 8421-2000的标准[25],采用1/3倍频程带宽法计算,得到农具质量与驾驶员全身振动联合加权加速度均方根的关系曲线,如图7所示。
从图7的数据可以分析出:当悬挂农具拖拉机以 4 km·h-1速度,转向12°行驶,农具提升臂和水平方向夹角为45°的时候,由于座椅悬架减振和拖拉机的行驶速度较低,拖拉机空载时,联合加权加速度均方根值为0.434 m·s-2,驾驶员稍有不适。当悬挂农具后,随着农具质量增大,驾驶员全身振动联合加权加速度均方根由0.434 m·s-2逐渐增大到0.629 m·s-2,驾驶员的不舒适感也逐渐增强。
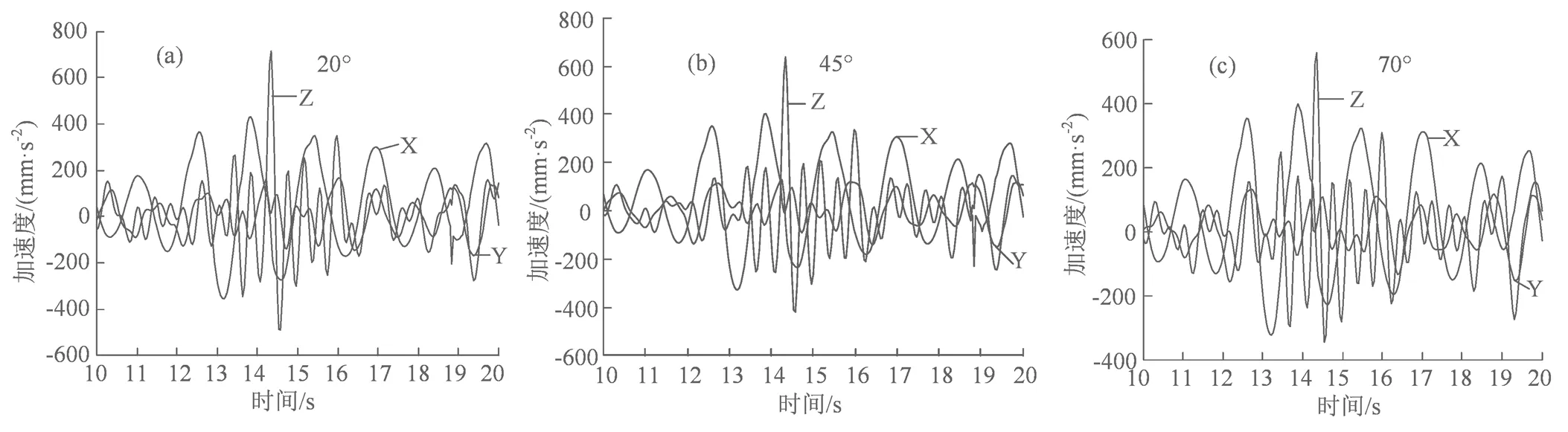
(a)悬挂农具角度20 °时驾驶员振动加速度;(b)悬挂农具角度45 °时驾驶员振动加速度;(c)悬挂农具角度70 °时驾驶员振动加速度。
Figure 8 Time-domain diagram of the driver's vibration acceleration

(a)悬挂农具角度20°时驾驶员振动加速度功率谱密度;(b)悬挂农具角度45 °时驾驶员振动加速度功率谱密度;(c)悬挂农具角度70 °时驾驶员振动加速度功率谱密度。
Figure 9 Power spectral density diagram of the driver's vibration acceleration

图10 驾驶员全身振动联合加权加速度均方根值
Figure 10 RMS of the driver's whole body weighted acceleration
2.3 农具悬挂角度对拖拉机乘坐转向舒适性影响
拖拉机以4 km·h-1在D级随机路面行驶,拖拉机前轮转向角为12°,悬挂农具质量为900 kg,选取悬挂装置内提升臂和水平方向夹角20°、45°和70° 3组不同角度。仿真过程设计为:0~5 s拖拉机静止,5~7 s拖拉机加速到4 km·h-1,7~9 s拖拉机前轮转向12 °,9 s后拖拉机进入转向行驶状态,本研究截取了10 s后匀速阶段的振动信号进行分析处理。仿真得出4组不同夹角工况下驾驶员质心的振动加速度时域波形图如图8所示,X、Y、Z 分别表示驾驶员在3个轴向的加速度。
随着悬挂装置提升臂和水平方向夹角的增大,驾驶员在 X、Y、Z 3个方向的振动加速度逐渐减小。在ADAMS软件后处理模块中通过傅里叶变换得到驾驶员质心加速度功率谱密度如图9所示,加速度随着悬挂装置提升臂和水平方向夹角的增大而减小,但是幅度较小。
根据GB/T 8421-2000[25]的标准,采用1/3倍频程带宽法计算,得到悬挂装置内提升臂和水平方向的夹角与驾驶员全身振动联合加权加速度均方根的关系曲线,如图10所示。
从图10的数据可以分析出:当悬挂农具拖拉机以4 km·h-1的速度、转向12°行驶、悬挂农具质量为900 kg的时候,由于座椅减振和拖拉机的行驶速度较低,驾驶员稍有不适。当悬挂装置和水平方向夹角增大时,驾驶员全身振动联合加权加速度均方根由0.701逐渐减小到0.558 m·s-2,驾驶员的不舒适感也逐渐减小。
3 讨论
本研究以某型拖拉机和深松机为研究对象,建立了人-机-路面虚拟样机模型。研究悬挂农具悬挂角度和农具自身的质量对于拖拉机转向过程中驾驶员乘坐舒适性的影响。当拖拉机以4 km·h-1进行12 °转向时,农具质量和悬挂位置对于驾驶员的乘坐舒适性有很大的影响。农具空载和质量为300 kg、600 kg、900 kg 4种不同的工况下,驾驶员质心位置的联合加权加速度均方根值分别为0.434 m·s-2、0.474 m·s-2、0.566 m·s-2和0.629 m·s-2;农具内提升臂和水平方向夹角20°、45°和70° 3种工况下,驾驶员质心位置的联合加权加速度均方根值为0.701 m·s-2、0.629 m·s-2和0.558 m·s-2。仿真结果表明拖拉机转向行驶过程中,悬挂农具的质量越大、悬挂角度越小,驾驶员质心位置的联合加速度均方根值越大,驾驶员舒适性越低。
分析本研究的试验验证部分,试验验证值比仿真值略大,其原因可能由两点,一是没有考虑到发动机振动对于其他位置振动的影响;二是拖拉机和人体模型建立的还不够精确。后续研究中可以考虑分析多个不同转向角度对于拖拉机振动的影响;可以考虑对于拖拉机和人体的建模更加精细,对于人体各个不同位置的振动情况分析;本研究为拖拉机的减振系统设计提供了重要参考。
[1] 王智慧.运输状态下拖拉机农具的主动减振控制研究[J].装备制造技术,2015(10):27-29.
[2] 鲁植雄,刁秀永,龚佳慧,等.轮式拖拉机线控液压转向系统路感特性与评价[J].农业工程学报,2015,31(12):57-63.
[3] 房素素,鲁植雄,王增才,等.拖拉机线控液压转向系统设计及样车性能试验[J].农业工程学报,2017,33(10):86-93.
[4] 张长龙, 李文春, 马蓉, 等. 基于模糊PID自动转向控制系统的研究[J]. 农机化研究, 2016,38(11): 162-165, 176.
[5] SERVADIO P, MARSILI A, BELFIORE N P. Analysis of driving seat vibrations in high forward speed tractors[J]. Biosystems Engineering, 2007, 97(2): 171-180.
[6] RAHMAN M S, KIBRIA K M G. Investigation of vibration and ride characteristics of a five degrees of freedom vehicle suspension system[J]. Procedia Engineering, 2014, 90: 96- 102.
[7] MEHTA C R, TEWARI V K. Damping characteristics of seat cushion materials for tractor ride comfort[J]. J Terramechanics, 2009, 47(6): 401-406.
[8] 田晓峰,孔德刚,苏锦涛,等.拖拉机驾驶座椅振动舒适性研究现状分析[J].农机化研究,2010,32(9):249-252.
[9] 徐锐良,李三妞,郭志军,等.拖拉机座椅悬架对动态舒适性影响的研究[J].农机化研究,2016,38(2):240-243.
[10] 陈勇,朱思洪,马然.拖拉机振动对驾驶员舒适性影响的试验研究[J].拖拉机与农用运输车,2013,40(5):13-15.
[11] 朱思洪,徐刚,袁加奇,等.农具质量对拖拉机悬挂农具系统振动特性的影响[J].农业工程学报,2014,30(24):30-37.
[12] 薛金林,汪珍珍,李毅念,等轮胎胎压和车速对无悬架拖拉机横向乘坐振动特性的影响[J]农业工程学报,2017,33(19):94-101.
[13] 徐刚,朱思洪,聂信天,等.国产拖拉机振动系统固有频率研究[J].振动与冲击,2014(15):157-161.
[14] 顾林,周永清,陈勇,等.基于ADAMS的拖拉机空间振动特性仿真研究[J].机械设计,2014,31(1):80-83.
[15] HIEMSTRA-VAN MASTRIGT S, KAMP I, VAN VEEN S A T, et al. The influence of active seating on car passengers' perceived comfort and activity levels[J]. Appl Ergon, 2015, 47: 211-219.
[16] VILLIBOR G P , SANTOS F L , QUEIROZ D M D , et al. Vibration levels on rear and front axles of a tractor in agricultural operations[J]. Acta Sci-Technol, 2014, 36(1): 7-14.
[17] GIALAMAS T, GRAVALOS I, KATERIS D, et al. Vibration analysis on driver’s seat of agricultural tractors during tillage tests[J]. Span J Agric Res,2016,14 (4):e0210.
[18] 周杰,徐红梅,王君,等.基于ADAMS的轮式拖拉机行驶平顺性研究[J].华中农业大学学报,2017,36(3):93-100.
[19] 高锐涛,汪洋,杨洲,等.拖拉机座椅舒适性及减振悬架设计研究进展[J].机械设计,2018,35(8):99-105.
[20] JENSEN A, KAERLEV L, TÜCHSEN F, et al. Locomotor diseases among male long-haul truck drivers and other professional drivers[J]. Int Arch Occ Env Hea, 2008, 81(7): 821- 827.
[21] 邢鹏飞,张宾,付卫东,等.拖拉机振动对驾驶员影响的分析及改进[J].拖拉机与农用运输车,2011,38(4):8-12.
[22] 中国汽车技术研究中心.车辆振动输入:路面平度表示方法:GB/T 7031-1986[S].北京:中国标准出版社,1986.
[23] 中国机械工业联合会.农业轮式拖拉机和后悬挂农具的匹配:GB/T 10911-2003[S].北京:中国标准出版社,2004.
[24] 全国机械振动、冲击与状态监测标准化技术委员会.机械振动与冲击人体处于全身振动的评价第1部分一般要求:GB/T 13441.1-2007 [S]. 北京:中国标准出版社,2007.
[25] 国家机械工业局.农业轮式拖拉机驾驶座传递振动的试验室测量与限值:GB/T 8421-2000[S]. 北京:中国标准出版社,2000.
Influence of hanging farm tools on riding comfort of tractor steering
CHEN Pushuang1, NI Weiqiang1, WU Saifei1, SHANG Lili1, XU Liangyuan1,2, YANG Yang1,2, JIANG Qing1,2
(1. School of Engineering, Anhui Agricultural University, Hefei 230036;2. Anhui Province Engineering Laboratory of Intelligent Agricultural Machinery and Equipment, Hefei 230036)
In this paper, taking the tractor and deep loosening machine as the research object, the model of tractor and farm tool were established in UG and imported into ADAMS, and the virtual prototype model of a driver - tractor - road surface was established in ADAMS. The influence of the mass of farm tools and the angle of suspension on the driver's riding comfort in the process of tractor steering was studied. When the tractor was unloaded and the hanging farm tool was 300 kg, 600 kg and 900 kg, the RMS of the joint weighted acceleration of the tractor driver was 0.434, 0.474, 0.566 and 0.629 m·s-2. When the angle between the lifting arm and the horizontal direction of the tractor hanging farm tool increases from 20° to 45° and 70°, the RMS of the weighted joint acceleration of the tractor driver was 0.710, 0.629 and 0.558 m·s-2. The results showed that, the greater the mass of the hanging farm tools, the smaller the hanging angle of the farm tool, the larger RMS of the joint weighted acceleration of the tractor driver, the more uncomfortable for the driver. This study provides an important reference for the vibration reduction design of tractors in the later stage.
tractor; farm tools; vibration; steering; comfort
S222.3
A
1672-352X (2021)03-0488-08
10.13610/j.cnki.1672-352x.20210706.022
2021-7-12 11:06:45
[URL] https://kns.cnki.net/kcms/detail/34.1162.S.20210709.1707.004.html
2020-07-17
国家重点研发计划(2017YFD0700104)资助。
陈普双,硕士研究生。E-mail:2812648201@qq.com
许良元,博士,教授。E-mail:xlyjwh@ahau.edu.cn
猜你喜欢
学与玩(2022年10期)2022-11-23
机械设计与制造(2022年5期)2022-05-19
军事文摘(2020年20期)2020-11-16
汽车零部件(2019年10期)2019-11-13
农家科技中旬版(2018年5期)2018-07-14
建筑热能通风空调(2018年5期)2018-07-09
池州学院学报(2017年3期)2017-10-16
消费者报道(2016年3期)2016-02-28
时代农机(2015年3期)2015-11-14
汽车零部件(2014年6期)2014-09-20
