
TBM清渣机器人机构及其轨迹规划方法研究
2021-09-17 01:02原晓伟卓兴建姜礼杰孙颜明
隧道建设(中英文) 2021年8期
原晓伟,卓兴建,姜礼杰,孙颜明,杨 航
(中铁工程装备集团有限公司,河南 郑州 450016)
0 引言
TBM是实施《中长期铁路网规划》、“一带一路”倡议等路网建设的重大核心装备[1],高效、安全是采用TBM开展隧道施工的核心竞争优势[2]。
TBM施工中,岩爆、顶部坍塌掉块导致渣石堆积在隧道底部拱架安装机附近,清渣已成为钢拱架立拱前的必备环节[3]。目前,渣石的清理主要依靠人工作业,即人工采用铁锹和编织袋将积渣装袋,然后采用运渣车运输出去。该方法作业效率低,严重制约隧道快速开挖。因此,提升隧道底部清渣的自动化程度,已成为提高开挖效率、加快施工进度亟需解决的问题[4-5]。但隧道底部积渣体量、位置和粒径分布具有随机性,给清渣装置的设计带来巨大挑战。
德国Herrenknecht公司采用小型装载机实现机械化作业,但对工作空间和操作人员技能要求高。意大利SELI公司研制了提斗式清渣机(见图1),但无法进行寻渣作业,且对工作空间要求较高。美国Robbins设计了一种4自由度辅助清渣机械臂(见图2),但其运渣工作需人工完成。西安理工大学研制了一种6自由度清渣机械臂[6],但该机械臂仅具有一种末端执行器,无法满足大范围渣石的清理。综上所述,目前底部清渣总体上尚未实现自动化,渣土采集与运输自动化在机构设计上有待突破。

图1 提斗式清渣机

图2 辅助清渣机械臂
针对上述实际问题,结合隧道底部积渣状态和现有的钢拱架施工工法,以开挖直径6 400 mm的敞开式TBM为搭载对象并建立试验台,提出一种隧道底部积渣清理机构搭配运渣小车的清渣方案,建立其清渣机械臂的运动学模型与轨迹规划方法,为渣石的快速清理提供条件。
1 清渣机器人机构设计
1.1 主要边界参数
清渣机器人系统以直径6 400 mm的敞开式TBM为搭载对象,隧道清渣区域示意如图3所示。开挖隧道断面半径O′A=3 200 mm,主梁高度OO′=1 062 mm,主梁宽度DE=1 372 mm,石渣堆积位置主要为隧道底部扇形ABC区域内,∠AO′B=∠CO′B=45°,清渣范围最近距离OB=2 138 mm,最远距离OA=OC=2 420 mm。
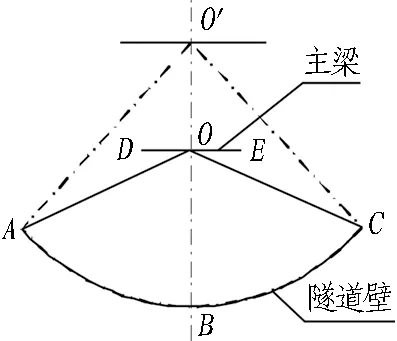
图3 隧道清渣区域示意图
根据现场实际施工作业情况及清渣机器人的作业边界,清渣机器人的作业参数如表1所示。
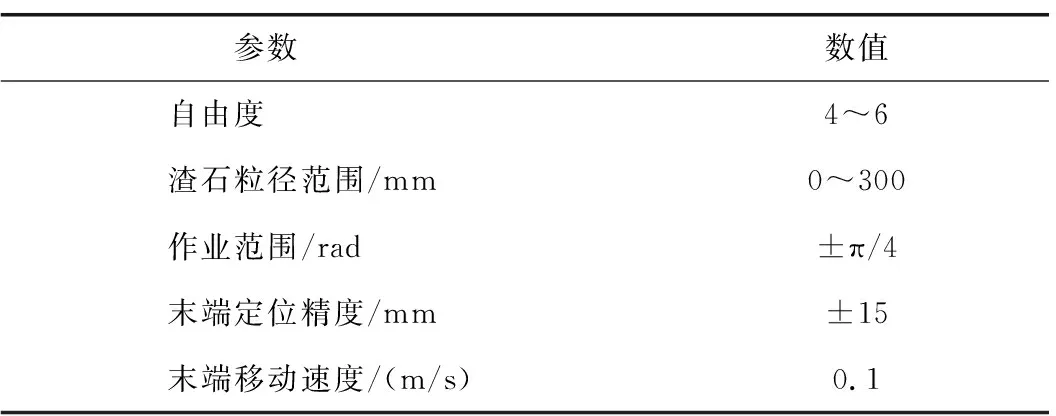
表1 清渣机器人作业参数
1.2 本体机构设计
清渣机器人本体机构如图4所示。清渣机器人主要由吊梁钢轨、滑动平台、驱动电机、回转支承、末端执行器和工业相机等组成。机构本体可沿主梁上吊梁钢轨进行隧道轴向移动,滑台驱动轮组、减速电机均安装在滑动平台安装板上,滑动平台由驱动轮组驱动; 回转支承连接滑动平台安装板与机械臂安装板,实现机械臂安装板的转动。考虑到施工现场渣石粒径不同,清渣机器人搭载3个臂身,分别为铲斗臂、搭配高负压工业吸尘器的吸尘臂以及瓣型抓手机械臂,并在末端配备不同的执行器。瓣型抓手机械臂用于处理粒径大于300 mm的少量孤石,铲斗臂用于处理60~300 mm中等粒径积渣,吸尘臂用于处理粒径小于60 mm的积渣。
1—吊梁钢轨; 2—减速电机; 3—滑台滑轮组; 4—滑台驱动轮组; 5—滑动平台安装板; 6—回转支承; 7—机械臂安装板; 8—铲斗臂; 9—瓣型抓手机械臂; 10—吸尘臂。
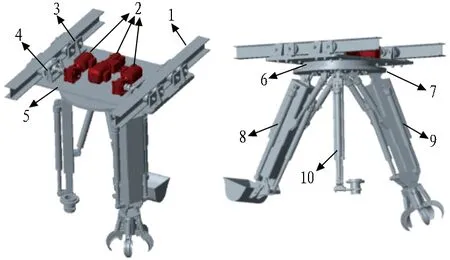
清渣机器人本体机构中3种机械臂运动机构相同,仅末端执行器不同。以图5所示的铲斗臂为例进行分析,该臂身采用液压驱动,根据结构特点将液压缸的直线位移分别转换为关节俯仰和伸缩,从而实现机械臂对不同位置渣石的抓取。
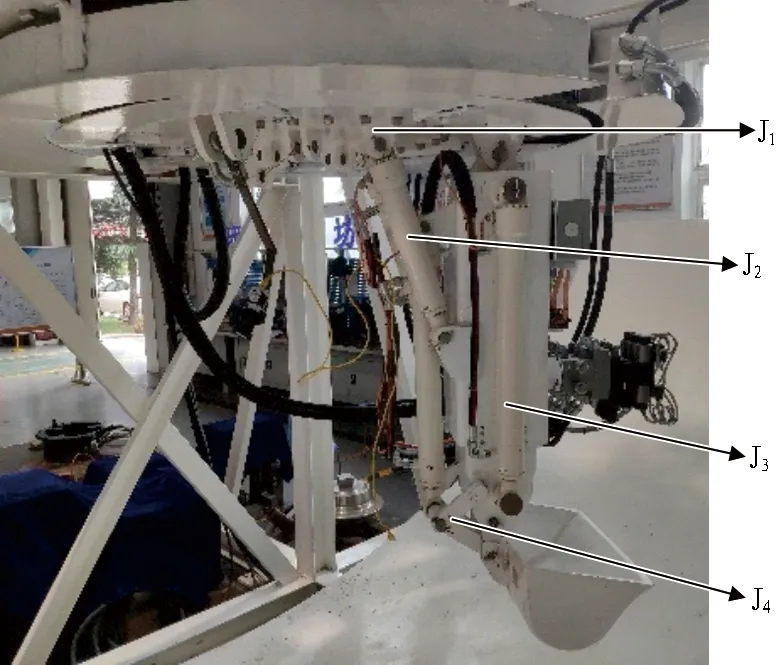
J1—肩部回转关节; J2—臂身俯仰关节; J3—臂身伸缩关节; J4—腕部俯仰关节。
1.3 作业流程
工业摄像头集成安装于主梁导轨上,采用机器视觉对渣石进行智能识别,并将图像信息送至上位机进行特征提取;分析获得渣石的位置坐标、渣量以及渣石粒径等信息,指导机器人作业模式决策;然后进行运动轨迹设计(或手动控制),上位机将运动轨迹转换为每个关节的运动变量,将其发送给运动控制器控制清渣机器人各关节的联动;按给定的轨迹将渣石放置于清渣储存装置中,重复动作,直至石渣清理完毕。
2 清渣机器人运动学分析
以清渣机器人铲斗臂为研究对象,建立数学模型,并对其末端铲斗的位姿与关节变量关系进行求解。由于铲斗臂在主梁上的滑动只改变清渣机器人的相对位置,而对末端姿态没有影响,因此,分析时先不考虑其在吊梁钢轨上的移动自由度。
2.1 正运动学分析
采用标准Denavit-Hartenberg(D-H)参数法,对机械臂的连杆和关节进行建模[7],然后以连杆的末端为坐标原点,建立清渣机器人铲斗臂的坐标系,获得其连杆坐标系,如图6所示。由图6所示的连杆坐标系可得清渣机器人铲斗臂的D-H参数,结果如表2所示。
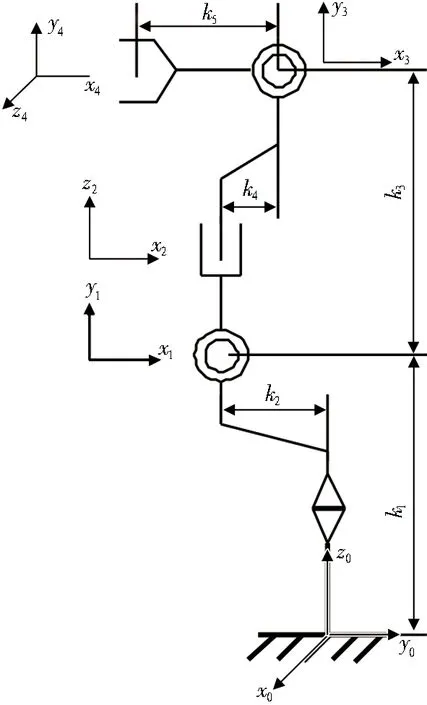
图6 铲斗臂连杆坐标系

表2 铲斗臂D-H参数
借助齐次坐标变换矩阵i-1Ti来表示相邻连杆坐标系i与i-1间的变换关系,见式(1)。
(1)
经简化,所研究的铲斗臂有4个自由度,则可通过4个变换矩阵0T1、1T2、2T3、3T4表示连杆间的变换关系。将表2的参数代入式(1),铲斗斗尖在基坐标系下的位姿
(2)
式(2)中:
nx=cos(θ2+θ4)cosθ1。
(3)
ny=cos(θ2+θ4)sinθ1。
(4)
nz=sin(θ2+θ4)。
(5)
ox=-sin(θ2+θ4)cosθ1。
(6)
oy=-sin(θ2+θ4)sinθ1。
(7)
oz=cos(θ2+θ4)。
(8)
ax=sinθ1。
(9)
ay=-cosθ1。
(10)
az=0。
(11)
px=cosθ1[0.413 4cos(θ2+θ4)+0.025cosθ2-
k3sinθ2+0.47]。
(12)
py=sinθ1[0.413 4cos(θ2+θ4)+0.025cosθ2-
k3sinθ2+0.47]。
(13)
pz=0.413 4sin(θ2+θ4)+sinθ2/40+k3cosθ2+0.39。
(14)
2.2 逆运动学分析
逆运动学分析是将位姿空间向关节空间转换,直接关系到运动分析和轨迹规划[8]。为了将铲斗末端定位在期望的位姿,需要采用逆运动学分析确定各连杆的长度和关节角度。
目前,机械臂的逆运动学求解方法主要有解析法、数值迭代法、几何法等[9]。几何法一般需要与解析法结合才能使用;数值迭代法一般只能获得1组解;解析法不仅能够求解出所有的解,还能证明无解的情况。因此,本文基于解析法进行逆运动学计算。已知清渣机器人末端位姿如式(2)所示,各关节变量求解过程如下。
1)求解θ1。根据式(9)得
θ1=arcsinax。
(15)
(16)
根据式(16)中对应元素第3行第1列相等,得到
sinθ4(oycosθ1-oxsinθ1)-cosθ4(nycosθ1-nxsinθ1)=0。
由于θ4∈[0°,180°],因此需要分情况讨论:
①当nycosθ1-nxsinθ1=0时,
若oycosθ1-oxsinθ1>0,则θ4=0°;
若oycosθ1-oxsinθ1<0,则θ4=180°;
若oycosθ1-oxsinθ1=0,则θ4=90°。
②对于其他情况,θ4有唯一解,即
(17)
3)求解θ2。式(16)中,根据对应元素第2行第1列相等,得到
nzcosθ4-ozsinθ4=sinθ2。
则
θ2=arcsin(nzcosθ4-ozsinθ4)。
(18)
4)求解d3。式(16)中,根据对应元素第2行第4列相等,得到
pz-0.413 4nz-0.39=d3cosθ2+0.025sinθ2。
则
(19)
通过上述过程,即可获得末端斗尖想要达到任意位姿0T4时各关节的运动变量θ1、θ2、d3、θ4。
3 机械臂工作空间计算
工作空间表示机器人末端可以到达的几何空间,是清渣机械臂的重要指标之一。目前,计算和描绘方法有很多,包括解析法、数值法、图解法等。其中,数值法中最具代表性的蒙特卡洛法具有思路简单、不受机械臂构型限制的优点。因此,本文采用该方法进行工作空间计算,其具体实现过程为:
1)确定各关节变量的运动极限;
2)用Matlab的rand函数生成大量关节变量的随机值;
3)将得到的随机值代入到正运动学模型,即式(2),获得大量空间坐标;
4)用plot3函数将各散点显示在空间中,即为铲斗臂斗尖的可达空间范围。
根据上述方法,获得清渣机械臂工作空间云图,如图7所示。

(a) 作业空间云图
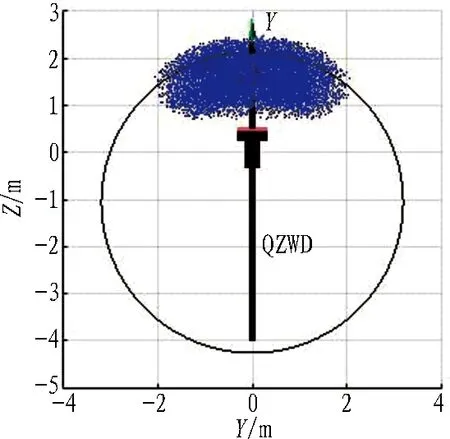
(b) 作业空间投影
从作业空间在YOZ平面上的投影(即图7(b))可以看出,清渣机器人清渣臂末端铲斗的最大作业深度为2 458 mm,最大作业半径为2 064 mm。对比1.1节中的系统边界参数与作业参数可知,清渣机器人清渣臂能够满足掘进机的清渣需求。
4 机械臂轨迹规划
在实际清渣过程中,一般是已知铲斗臂的当前位姿、目标位姿、路径所经过有限个节点以及关节运动的速度、加速度极限信息,然后采用数学方法计算得到铲斗臂的时变规律,以保证清渣臂在约束范围内快速、平稳、无冲击地完成作业[10]。
目前,常用的方法主要有多项式插值、梯形速度曲线和样条曲线插值[11-13]等。其中,梯形速度曲线能够保证机械臂以最大加速度运动,能够使运动时间最短,但是加速度发生突变,导致机器人冲击较大;多项式轨迹规划通过对速度和加速度进行约束,能够使机器人运动平稳、无冲击。
(20)
(21)
(22)
(23)


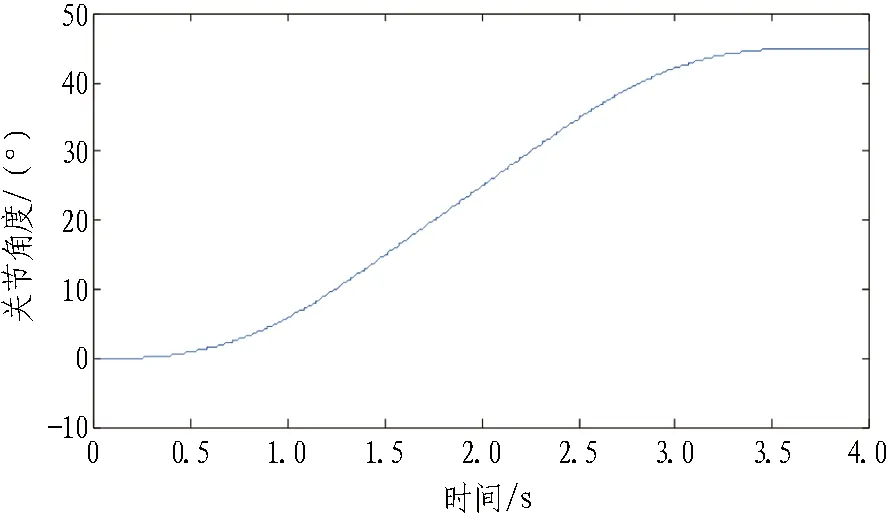
图8 关节角度变化曲线
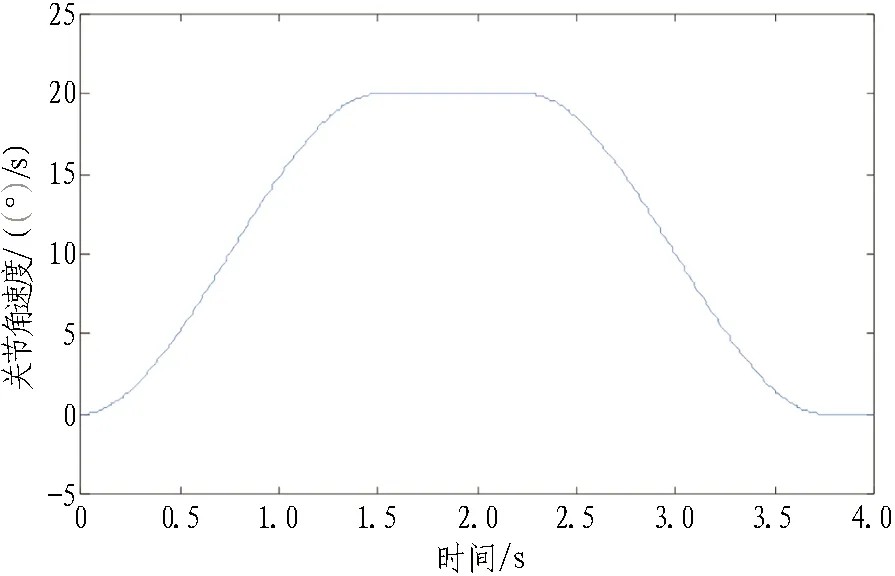
图9 关节角速度变化曲线
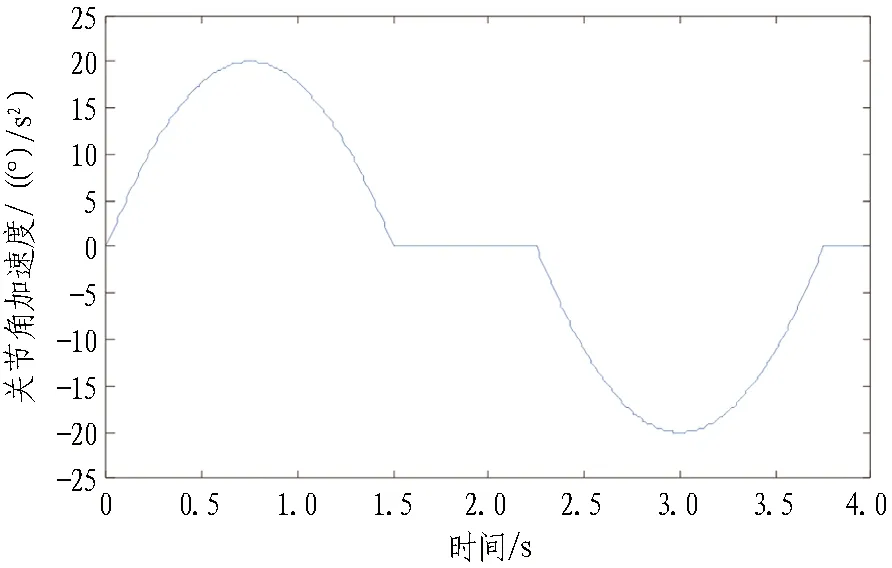
图10 关节角加速度变化曲线
关节角度、角速度、角加速度是清渣机构运动过程中关节变量与运行时间的函数,是运动的重要参数。从图8—10中可以看出,该关节的总运动时间为3.75 s。其中,0~1.50 s为加速运动过程,在1.50 s时速度达到最大;在1.50~2.25 s关节以最大速度匀速运动,直到2.25 s时,关节开始做减速运动;在3.75 s时,关节运动到目标位置,速度、加速度均为0。
图8所示关节角度变化曲线直接反映了清渣机构关节运动的平滑性。由图9可知,在清渣机构运动过程中,关节的速度满足约束条件、无突变的要求,可快速平稳地完成清渣过程。由图10表明,在清渣机构运动过程中,在有限的行程内,满足设定的约束条件下,匹配以相对应的加速度可使速度快速达到设定值,同时可保证机构运行的平稳性。从速度变化曲线和加速度变化曲线来看,机械臂在运动过程中关节运动连续、平滑、无冲击。
5 结论与讨论
1)本文设计了一种新型的隧道底部积渣清理机器人机构,以实际的TBM为搭载对象,对其结构及作业流程进行阐述。通过正、逆运动学分析及工作空间计算最终表明,该机构满足设定的清渣作业需求,为掘进机底部积渣清理提供了新的方案。
2)为保证机械臂运动过程中其关节运动能连续、平滑、无冲击地完成作业,基于多项式插值和梯形速度曲线,提出了一种混合插值轨迹规划方法。根据得到的角度变化曲线、角速度变化曲线、角加速度变化曲线可知,机械臂运行过程中,关节的平滑性及平稳性良好。
3)针对此清渣机构解决方案,下一步将深度融合机器视觉及智能识别技术,进行样机搭载试验,以满足TBM施工清渣自动化及智能化的迫切需求。
猜你喜欢
当代工人(2020年8期)2020-05-25
电子制作(2019年15期)2019-08-27
重型机械(2019年3期)2019-08-27
中国外汇(2019年6期)2019-07-13
小读者(2019年24期)2019-01-10
小溪流(画刊)(2017年12期)2018-01-10
中国交通信息化(2017年8期)2017-06-06
小天使·四年级语数英综合(2016年11期)2016-11-29
儿童故事画报·发现号趣味百科(2015年12期)2016-01-25
海军航空大学学报(2015年1期)2015-11-11
