
无人机大比例尺成图数据精度验证
2021-09-18 03:29于东海任旭斌
矿山测量 2021年4期
于东海 ,任旭斌
(1.甘肃省测绘工程院,甘肃 兰州 730000;2.甘肃省应急测绘工程研究中心,甘肃 兰州 730000)
随着无人机(Unmanned Aerial Vehicle,UAV)航空摄影测量技术[1-2]的日趋成熟,由起初仅依靠航摄相机获取的像片来生产数字正射影像 (Digital Orthophoto Map,DOM),发展到如今搭载多镜头倾斜相机和激光雷达等设备获取多源数据来生产实景三维模型[3-5]和数字表面模型(Digital Surface Model,DSM),现代测绘对无人机航摄要求的深度和广度正在逐渐提高[6-8]。
无人机航摄系统能够快速高效的获取目标区域的航空影像,且机载定位定姿系统(Position and Orientation System,POS)能记录摄影瞬间的影像外方位元素,实现了在无需或少量像控点情况下的成图数据生产[9-12]。朱进等[13]提出了一种能够有效减少像控点数量的无人机航测布点方案;张纯斌等[14]分析了小型消费级无人机在不同航高下获取地形数据的误差变化;万剑华等[15]研究了像控点数量与分布和无人机航测成果质量之间的关系。已有研究只针对影响无人机航测成果的单一因素进行分析,而对于不同比例尺的不同空三加密方式如何影响成图数据精度,却鲜有研究。
无人机航测技术为大比例尺成图数据的生产提供了高效快捷的新途径。本文以无人机航摄系统为平台,获取实验区1:2 000、1:1 000和1:500三种成图比例尺的航摄数据,进行有像控点和无像控点两种空三加密处理,并对生产的DOM和DSM进行精度检验,旨在为利用无人机航测生产大比例尺成图数据提供参考依据。
1 研究方法
1.1 总体路线
如图1所示,本文以无人机航摄系统为平台,获取实验区1:2 000、1:1 000和1:500三种成图比例尺的航摄数据,分别采用有像控点和无像控点的空三加密方式(以下简称“有控”和“无控”)进行处理,并利用实测检查点对生产的六组DOM和DSM进行精度检验,分析平面和高程中误差的分布范围及变化规律。
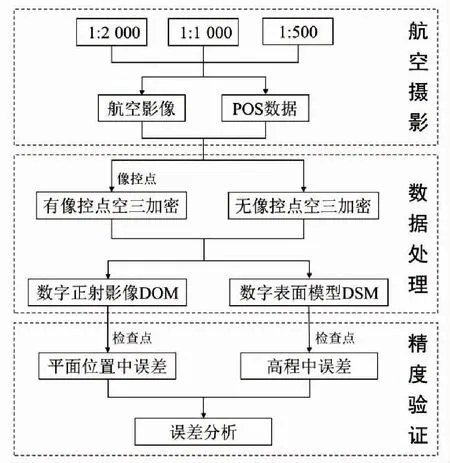
图1 研究方法示意图
1.2 实验设计
为分析1:2 000、1:1 000和1:500三种比例尺的成图数据精度,分别设计Ⅰ号、Ⅱ号、Ⅲ号实验航线。设计原则为:
(1)统一的重叠率。由于无人机抗风能力和相机像幅等因素的限制,为保证所获取影像不出现漏洞,将航向重叠率设为75%,旁向重叠率设置为65%;
(2)航线必须完全覆盖测设的像控点,并保证像控点位于相邻航线中线附近;
(3)按照设计航高所获取的影像地面分辨率必须满足各成图比例尺的相应要求[16],即1:2 000优于0.2 m,1:1 000优于0.1 m,1:500优于0.05 m;
(4)在确保飞行安全的前提下,兼顾时效性和经济性。
实验航线设计参数如表1所示,其中,Ⅱ号航线设计如图2所示。
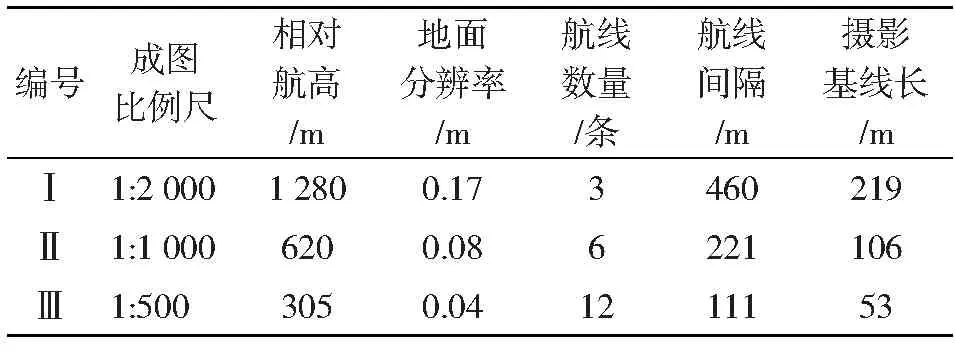
表1 实验航线设计参数

图2 Ⅱ号航线设计图
2 实验与分析
2.1 无人机数据获取
2.1.1 实验区概况
实验区位于兰州市七里河区黄峪乡西北部,为面积约5 km2的矩形区域,地理坐标为东经103°42′07″、北纬36°01′10″,平均海拔约1 850 m,为黄土丘陵地形,内含居民地、道路、农田等地物类型。视野开阔无障碍物,卫星信号强,适合无人机飞行作业。
2.1.2 航摄平台
数据获取平台为JOUAV CW-007无人机航摄系统,由无人机、地面控制站、基站三部分组成。其中,无人机采用电动复合翼(固定翼+四旋翼)布局形式,集成POS系统和经过检校的SONY-α7rⅡ数码相机,具有航时长、速度快和垂直起降的特点,适合复杂地形的航摄飞行。无人机及相机的基本参数如表2所示。作业时,地面控制站和基站、无人机通过无线链路相互连接,完成航线规划、飞前检查、起飞降落、任务执行等动作指令。

表2 无人机及相机的基本参数
2.1.3 航摄执飞
数据获取时间为2019年9月20日,天气晴朗、风力2~3级。通过实地踏勘,选取位于实验区南侧四周空旷的农田作为临时起降点进行航空摄影。
航摄流程包括:(1)组装无人机,并架设基站和地面控制站,保持三者数据链路畅通;(2)设置起降点基准高程,并依据实际地形对航线进行微调;(3)上传航线至飞控,并检核航高、摄影基线、重叠率等参数设置是否正确;(4)进行飞前检查,主要包括发动机、舵机、相机等硬件是否正常工作;(5)执飞,通过地面控制站实时监控飞机飞行状态和相机曝光状态,完成航摄任务后按既定降落航线实施降落;(6)导出航摄影像并下载机载数据和基站数据后,进行数据检查。
按上述流程获取实验区航空影像数据,Ⅰ号、Ⅱ号、Ⅲ号航线各飞行一个架次,分别获取47张、196张、725张有效航空影像及其相应的机载和基站数据。
2.2 像控点测设
采用白灰涂洒的方式在实验区内按“四角+中心控制”方案布设5个像控点,即区域四个角点附近和中心点附近各测设一个像控点。选取50个均匀遍布的明显地物特征点(如道路标识线、广场铺砖等)作为检查点。像控点和检查点均为平高点,使用Trimble R4仪器采用基于GSCORS系统的网络RTK方式测量各点坐标(坐标系为CGCS2000和大地高)。像控点样式和效果如图3所示。
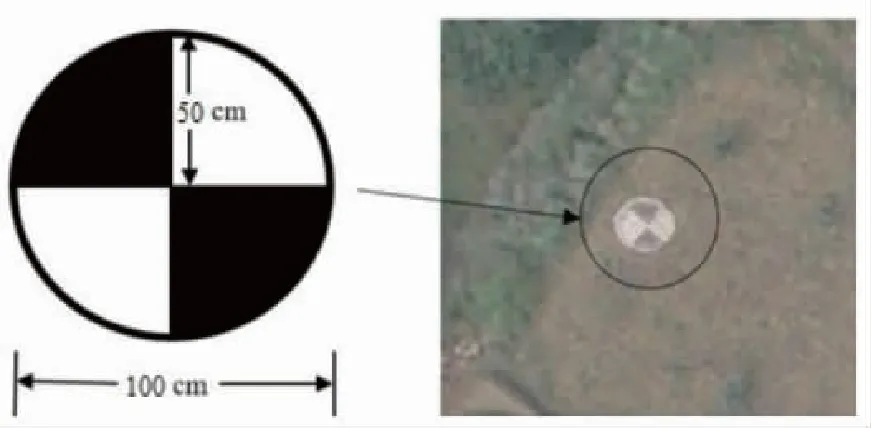
图3 像控点样式图
2.3 数据处理
2.3.1 POS数据解算
JOUAV CW-007无人机航摄系统在作业过程中,无人机通过机载POS系统记录飞行姿态数据“Photo”和流动差分数据 “Rover”,基站记录固定差分数据“Base”。通过配套的JoPPS后差分解算软件,结合实测的基站点坐标和飞机天线偏心分量(X′=-1.031 m,Y′=0 m,Z′=-0.199 m)解算航摄飞行的POS数据。经检查,Ⅰ号、Ⅱ号、Ⅲ号航线的POS数据解算固定解率均为100%,可直接用作后续使用。所得POS数据包含每个摄站点的坐标X值、Y值、Z值和瞬时姿态角度φ值、ω值、κ值。
2.3.2 空三加密
对实验获取的航空影像按照两种方式进行空三加密处理:(1)有控处理,即将实测的5个像控点和POS数据同时作为光束法区域网平差的约束条件进行处理。(2)无控处理,即仅利用POS数据作为光束法区域网平差的约束条件进行处理。
使用Agisoft Photoscan摄影测量软件进行空三加密。处理时,软件中同一阶段的参数必须设置相同,以确保所有数据处理过程的一致性。关键参数设置为:“Align Photos”选项中的“Accuracy”参数设置为“High”,此参数决定影像自动匹配连接点的精度;“Build Dense Cloud”选项中的“Quality”设置为“High”,此参数决定同名像点匹配点云的密度;其余选项参数均保持默认。此外,在有控处理时,将像控点逐一手动精确调整至影像对应位置后,须再进行“Optimize Camera Alignment”优化。
对航摄数据分别按上述方式进行处理,输出空三加密结果,并依次编号为Ⅰ-1、Ⅰ-2、Ⅱ-1、Ⅱ-2、Ⅲ-1、Ⅲ-2,其中,“1”代表有控处理,“2”代表无控处理。
2.3.3 数据生产
以空三加密结果为基础,在Agisoft Photoscan软件中分别生产六组DOM和DSM成图数据。以Ⅱ-1组为例,生产的数据如图4所示。

图4 Ⅱ-1组成图数据
3 精度验证
3.1 评定标准
以中误差作为衡量数据精度的指标,中误差越小,精度越高,中误差越大,精度越低。依据现行规范[16-17]要求,结合实验区的实际地形,选用如表3所示的技术指标作为各比例尺成图数据的平面和高程精度标准。

表3 精度评价标准
3.2 误差计算
对六组数据分别进行精度检验。以检查点的实测坐标为真值,对DOM和DSM中对应点的图解坐标进行对比分析,计算平面位置中误差和高程中误差。计算公式为:
(1)
(2)
(3)
(4)

3.3 误差分布
按式(1)和式(2)分别计算六组数据的平面误差距离Δsi和高程误差距离Δhi。为清晰直观的反映平面和高程误差距离的整体情况,将计算结果按递增顺序排列绘制如图5所示的误差距离分布图。

图5 误差距离分布图
图5(a)中,有控处理生产的Ⅰ-1组、Ⅱ-1组和Ⅲ-1组的平面误差距离为0.081 ~0.231 m、0.046 ~0.161 m和0.022 ~0.107 m,平面误差距离整体较小,其各自曲线均波动微小,说明有控处理的DOM平面精度较高且分布均匀;无控处理生产的Ⅰ-2组、Ⅱ-2组和Ⅲ-2组的平面误差距离为0.309 ~0.830 m、0.208 ~0.627 m和0.154 ~0.398 m,平面误差距离整体较大,其各自曲线均波动明显,说明无控处理的DOM平面精度较低且分布不均匀。
图5(b)中,Ⅰ-1组、Ⅱ-1组和Ⅲ-1组的高程误差距离为0.020~0.565 m、0.027~0.387 m和0.027~0.265 m,Ⅰ-2组、Ⅱ-2组和Ⅲ-2组的高程误差距离为1.374~1.945 m、0.986~1.551 m和0.491~1.426 m。可知,无控处理的DSM高程误差距离明显较大,且曲线走势分散、波动显著,说明其高程精度分布不均匀、可靠性较低。
综上,随着成图比例尺增大,影像地面分辨率提高,平面和高程距离误差整体呈减小趋势,有控处理的精度明显高于无控处理的精度。
3.4 结果分析
根据计算所得的检查点Δsi值和Δhi值,按式(3)和式(4)分别计算六组数据的平面位置中误差ΔS和高程中误差ΔH,计算结果如表4所示。

表4 成图数据中误差计算结果
由表4可知,满足1:2 000成图比例尺的Ⅰ-1组和Ⅰ-2组的平面位置中误差为0.161 m和0.571 m,高程中误差为0.322 m和1.693 m(>0.5 m,超标);满足1:1 000成图比例尺的Ⅱ-1组和Ⅱ-2组的平面位置中误差为0.104 m和0.444 m,高程中误差为0.221 m和1.325 m(>0.5 m,超标);满足1:500成图比例尺的Ⅲ-1组和Ⅲ-2组的平面位置中误差为0.057 m和0.275 m,高程中误差为0.142 m和1.122 m(>0.4 m,超标)。
可见,有控处理的DOM和DSM的平面和高程中误差均满足各比例尺成图数据的精度要求,无控处理的DOM平面位置中误差略小于精度要求,而DSM高程中误差超出精度要求约3倍。说明,成图比例尺一定时,有控处理的中误差小于无控处理结果,且满足精度要求;成图比例尺变大时,无论是有控处理还是无控处理,其平面和高程中误差均逐渐减小。
综上,有控处理可用于生产完全符合不同成图比例尺精度要求的DOM和DSM,可供大比例尺地形图测绘更新等定量和定性分析使用,而无控处理只可用于生产刚好满足平面精度要求的DOM,其DSM仅供地形走势等定性分析决策使用。因此,在实际项目中,可根据不同的测绘任务需求,选取恰当的成图比例尺和空三加密方式生产所需数据。
4 结论与讨论
通过对无人机航测获取的实验区1:2 000、1:1 000和1:500三种比例尺的成图数据进行精度分析,结果表明:(1)采用有控处理的不同比例尺的DOM和DSM的平面和高程中误差完全满足精度要求,且有控处理的整体精度明显高于无控处理结果;(2)随着成图比例尺的变大,两种空三加密生产的DSM和DOM的平面和高程中误差均逐渐减小,即成图比例尺大小与精度高低成正比。因此,可根据实际需求,以“按需分精度测绘”为原则生产不同级别的成图数据。
由于受无人机自身固件的约束,只以单一丘陵地形的小范围区域为实验对象,分析不同比例尺的不同空三加密方式对成图数据精度的影响,而对于复杂地形的大范围测区分析,有待进一步研究验证。
猜你喜欢
科技管理研究(2022年18期)2022-10-29
军民两用技术与产品(2022年1期)2022-06-01
资源信息与工程(2021年5期)2022-01-15
当代陕西(2020年23期)2021-01-07
电脑爱好者(2020年6期)2020-05-26
军民两用技术与产品(2019年12期)2020-01-19
消费导刊(2017年8期)2018-01-18
课堂内外(小学版)(2017年5期)2017-06-07
投资北京(2017年1期)2017-02-13
基础教育参考(2015年5期)2015-06-01
