单轴并联混合动力商用车整车总质量在线估计算法
2021-11-01 09:07梅程彭建鑫胡宇辉
兵工学报 2021年9期
梅程, 彭建鑫, 胡宇辉,2
(1.北京理工大学 机械与车辆学院, 北京 100081; 2.北理慧动(常熟)车辆科技有限公司, 江苏 常熟 215505;3.北京航空航天大学 杭州创新研究院, 浙江 杭州 310000)
0 引言
整车总质量是车辆能量管理策略控制中的一项重要参数,车辆在行驶过程中,滚动阻力、坡度阻力等行驶阻力与车辆质量密切相关。车辆可依据质量参数优化自动变速器换挡规律来提高换挡品质,满足整车能量管理与主动安全的控制需求,提高车辆的动力性、经济性和安全性[1]。由于振动、冲击等不稳定因素,总质量难以直接测量获得,同时商用车承载质量大,总质量与整备质量相差数倍,总质量的估计十分必要。
国内外对车辆质量估计方法已有部分研究。文献[2]利用加速度传感器信号,基于车辆纵向动力学模型对数据拟合处理,得到整车质量,该方法估计精度取决于传感器精度以及外部扰动。文献[3]基于动力学模型提出了利用递归最小二乘法对质量进行估计的方法,但受坡度因素影响较大。有学者基于带多遗忘因子、变遗忘因子的最小二乘法[4-6]、卡尔曼滤波(KF)[7-8]等算法对整车质量和坡度信息进行联合估计,但存在模型复杂、计算量大、精度不足等问题。此外,文献[9]提取驱动力信号和纵向行驶加速度信号的高频部分,用递归最小二乘法求解整车质量,该算法需要进一步完善其稳定性,以在工程实践中应用。
为准确估计整车总质量,满足混合动力商用车纵向控制需求,本文分析车辆纵向动力学模型和混合动力系统复杂工况,基于扩展卡尔曼滤波(EKF)算法并结合P2混合动力系统的复杂工况特性,设计整车质量估计算法,并通过Cruise/Simulink软件联合仿真[10]及实车实验验证算法的有效性、准确性。
1 P2混合动力商用车架构
总质量估计算法是以P2混合动力单轴并联商用车为研究对象[11](见图1),该平台为搭载12挡混合动力电控机械式自动变速器(AMT)的6×4牵引车。整车关键零部件包括整车控制器、发动机、发动机控制器、离合器、变速箱、变速箱控制器、高压电池、电池管理系统、电机、电机控制器等。该平台支持车辆纯电动行驶、纯发动机行驶、混合动力行驶、怠速充电等多种模式协同工作。

图1 P2混合动力系统构成图Fig.1 Composition diagram of P2 hybrid system
2 质量参数特性分析
对于商用车,总质量变化范围比一般乘用车更大,以本文研究平台为例,空载时近9 t,满载时近49 t,相差数倍,因此需要实时估计车辆总质量,以实现换挡规律优化、能量管理策略的最优控制。理想情况下,车辆载荷可以通过传感器测量悬架获得[12],但由于可靠性和成本因素,难以应用于实际工程。
为了提高整车总质量算法的准确性,根据实际工况可获得质量参数信息的先验条件如下:
1)整车总质量通常仅在商用车停车装卸载荷时发生变化,在稳定行驶工况下,整车总质量可视为1个常数;
2)总质量真值在车辆状态变化时受到扰动较小;
3)由车辆纵向动力学方程可知,坡度阻力受车辆质量和坡度耦合作用影响,为准确估计车辆质量,通过陀螺仪传感器获取道路坡度信息[13],实现车辆质量和坡度信号的解耦,结合纵向动力学模型,采用EKF对车辆质量进行估计。
3 基于KF整车总质量估计
3.1 车辆动力学模型分析
车辆运动时视为刚体,驱动力矩由传动系统传递至车轮,车辆在行驶时受到阻力有滚动阻力、空气阻力、坡度阻力、加速阻力,由此依据驱动力- 阻力平衡方程建立车辆纵向动力学模型:
Ft=Fr+Fa+Fs+Fj,
(1)
式中:Ft为驱动力,
(2)
Tin=Ten+Te,
(3)
Tin、Ten、Te分别为变速器输入轴扭矩、发动机输出扭矩、电机输出扭矩,ig、itr分别为主减速器和变速器的传动比,ηt为传动系统效率,rw为车轮滚动半径;Fr为滚动阻力,
Fr=mgfcosα,
(4)
m为整车质量,g为重力加速度,f为滚动阻力系数,α为路面坡度角;Fa为空气阻力,
(5)
Cd为空气阻力系数,A为车辆迎风面积,ρ为空气密度,v为车辆行驶速度;Fs为坡度阻力,
Fs=mgsinα;
(6)
Fj为加速阻力,
(7)

由上述各式可得纵向动力学方程为
(8)
(8)式中质量m为待估参数,变速器输入轴扭矩Tin可从控制器局域网络(CAN)上获取,坡度角α由陀螺仪测量得到,其余参数则是车辆的常量参数,通过实验测试获得。
考虑到城市道路坡度比较小(见表1),则cosα≈1,sinα≈tanα≈α[14](见表2),由此可得
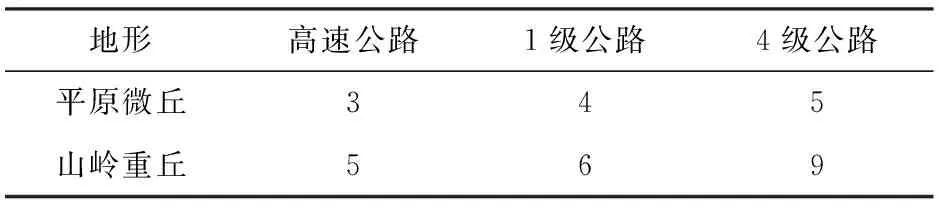
表1 我国公路坡度设计规范
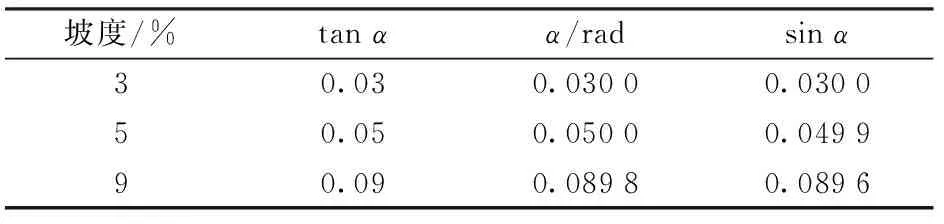
表2 不同坡度的三角函数值
(9)
3.2 KF算法原理
1960年Kalman提出了一种利用线性系统状态方程对系统状态进行最优估计的算法,即KF算法[15]。KF算法具有形式简单、计算量较小、实时性较好、易于编程实现等优点,广泛应用于车辆、导航、制导等领域。
KF算法计算步骤可分为预测更新和测量更新。预测更新部分依据上一时刻的系统状态,通过系统状态方程计算先验估计及其误差协方差矩阵,方程如下:
(10)
(11)
预测得到的先验估计值呈高斯分布,同时由于存在测量噪声,测量值也呈高斯分布。将预测值和测量值两个高斯分布相融合,则得到系统当前状态量的最优估计,方程如下:
(12)
(13)
(14)
式中:Kk为当前时刻卡尔曼增益矩阵;Hk为当前时刻测量矩阵;Rk为当前时刻测量噪声协方差矩阵;zk为当前时刻测量值;I为单位矩阵。
在给定初始状态值和误差协方差矩阵后,KF算法即可递归计算,实时估计系统的状态量。在实际车辆动力传动系统中,由于系统结构、参数、变量等非线性因素的存在,无法采用经典KF算法直接解决非线性系统的状态估计问题,因此需要运用EKF算法将非线性系统在平衡点处按泰勒级数展开,近似线性化,从而实现非线性系统的状态估计[16]。考虑到算法复杂度,泰勒级数一般只取到1阶。EKF算法流程图如图2所示。图2中,0为状态变量初始值,P0为误差协方差初始值。
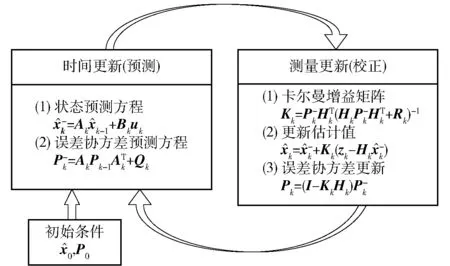
图2 EKF算法流程图Fig.2 Flow chart of EKF algorithm
3.3 基于EKF算法的质量识别方法
根据建立的纵向动力学模型,设置系统的状态变量xk=(vk,αk,mk)T,vk为当前时刻车速,αk为路面坡度角,mk为当前时刻整车质量。车辆稳定行驶时质量可视作一个常量。将路面坡度角、车速、加速度视作不会发生突变的连续量,在Δt时间内离散化后的系统预测方程为
(15)

(16)
Tin(k-1)为上一时刻变速器输入轴扭矩。
状态方程(15)式写为矩阵形式,有
(17)
式中:wk-1为上一时刻过程激励噪声矩阵。
虽然可通过系统状态转移方程
xk=f(uk-1,xk-1)+wk-1
(18)
得到预测估计值(uk-1为上一时刻的控制向量),但由于系统是非线性的,非线性化函数f计算得到的先验估计不是一个单峰高斯分布,不满足KF算法的使用条件,需要用1阶泰勒级数来构造近似的线性函数。上一次估计值〈xk-1〉处的1阶泰勒展开为
xk=f(uk-1,〈xk-1〉)+Fk-1(uk-1,xk-1-
〈xk-1〉)+wk-1,
(19)
式中:〈xk-1〉表示xk-1的估计值;Fk-1表示函数f在〈xk-1〉处对状态变量求偏导数得到的Jacobian矩阵,
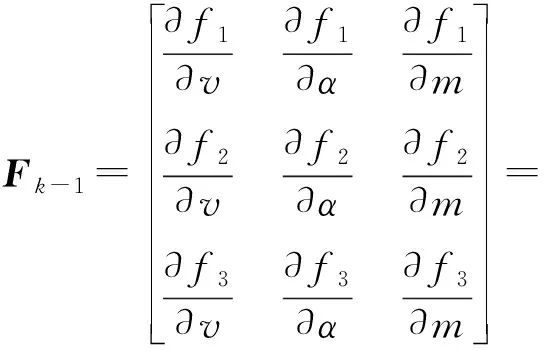
(20)
f1、f2、f3分别为车速、坡度角、整车质量的状态转移方程。由此可以得到系统的预测更新方程如下:
(21)
(22)
式中:Q为过程激励噪声协方差矩阵。
在测量更新中,车速可以通过轮速传感器或者传动系统输出轴转速计算得到,坡度角通过陀螺仪测量得到,因此系统的测量方程为
(23)
式中:zk为当前时刻测量值;H为测量矩阵;vk为当前时刻测量噪声,其与wk是互相独立的、均值为零的高斯白噪声。
初始误差协方差矩阵P0、过程噪声Q、测量噪声R对于EKF算法在实际应用中的收敛速度和估计精度有较大的影响。其中误差协方差的对角线项为各状态变量的方差,其余项则是变量之间的协方差,在变量间没有相关性时置为0.误差协方差的初始值代表了状态变量初始值的不确定性,一般可将P0设置为单位矩阵。过程噪声Q与模型精度、模型线性化程度、离散引入误差均有关系。测量噪声R与选用的传感器特性有关,取决于传感器的测量精度。本文依据传感器测量精度设置R,通过调整Q获得较好的估计效果。
P2构型单轴并联混合动力系统的运行工况复杂多样,并非所有情况下都可利用上述算法对质量进行估计。如在AMT换挡过程、车辆驱动模式切换等非稳态工况下,驱动扭矩会出现波动、损失,造成质量估计不准,影响算法收敛。因此算法的有效运行需要结合系统的状态信息,将算法运行限制到有效工况下。在非稳态工况,算法不进行下一时刻的估计,避免质量估计过程中出现偏差。结合P2混合动力系统状态信息的EKF算法流程如图3所示。

图3 算法流程图Fig.3 Algorithm flow chart
4 Cruise/Simulink软件联合仿真验证
本文基于Cruise软件搭建了P2混合动力商用车整车纵向动力学模型,在MATLAB/Simulink软件环境下开发了整车控制策略,以验证车辆总质量在线估计算法的有效性和准确性。
4.1 仿真环境
在Cruise软件环境中,车辆纵向动力学模型包括的组件有整车信息、发动机、干式离合器、驱动电机、电池、变速器、主减速器、制动器、轮胎、驾驶员模型,如图4所示。

图4 Cruise单轴并联汽车仿真平台Fig.4 Single-axis parallel vehicle model in Cruise
整个车辆动力学仿真模型可实现以下功能:
1)依靠整车参数高精度模拟车辆纵向行驶的驱动力和阻力;
2)支持车辆纯电动行驶、纯发动机行驶、混合动力行驶、怠速充电、行进间启动发动机、制动能量回收等模式。
同时仿真模型满足如下约束:
1)考虑传动系统刚度和阻尼等动态特性;
2)不考虑变速器换挡过程中同步器不同阶段的微观动力学。
在MATLAB/Simulink软件环境中搭建车辆控制模块,包括混合动力控制器(HCU)模块、AMT控制模块、仿真辅助模块等。其中基于EKF的车辆总质量在线识别算法封装在AMT控制模块的车辆状态识别模块中。通过Simulink软件中设置的INPUT/OUTPUT模块,完成Cruise环境和Simulink环境信号的交互,实现联合仿真,仿真步长为10 ms,如图5所示。
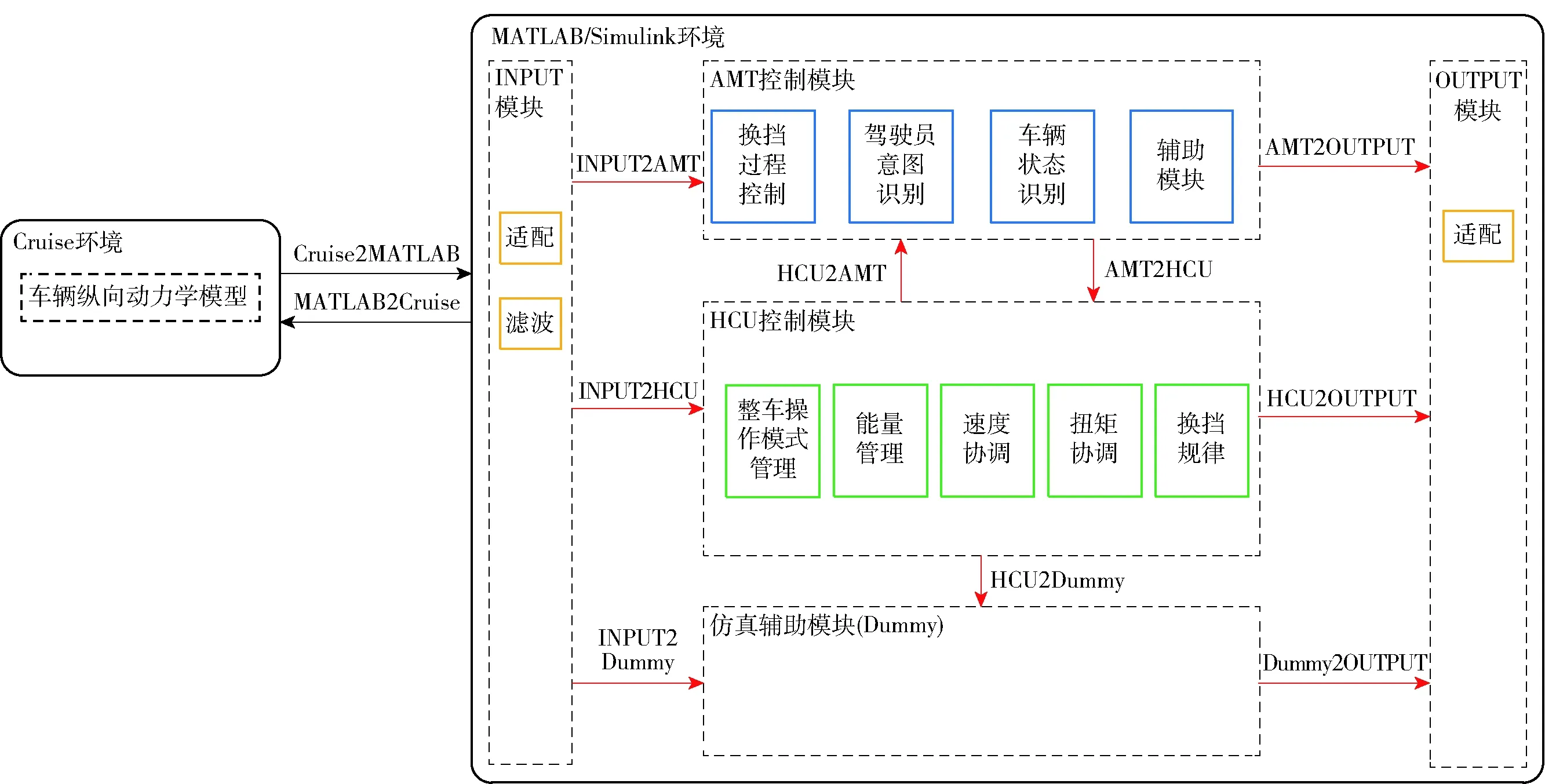
图5 单轴并联汽车Simulink控制模块示意图Fig.5 Schematic diagram of single-axis parallel vehicle control module in Simulink
4.2 仿真实验与结果分析
本文仿真对象为一单轴并联混合动力商用牵引车,空载质量8 800 kg,满载48 800 kg. 仿真实验工况为车辆空载、半载、满载,以验证质量在线估计算法的有效性和准确性。
图6、图7、图8分别为空载、半载、满载工况仿真实验中的部分整车信号。图6仿真实验中:车辆起步加速,经25 s升至12挡,换挡时发动机扭矩输出中断,电机调节扭矩以配合换挡;25 s后由发动机单独驱动,电机的扭矩降低为负值,进入行车充电模式。图7中,因整车质量增加,需求驱动扭矩更大,升挡过程耗时更长,车辆经41 s升至12挡;前125 s车辆由发动机与电机共同驱动,之后车辆进入行车充电模式。图8中,车辆以混合动力模式驱动,经54 s升至12挡,之后由于车速较低为45 km/h,允许车辆进入纯电动模式,由电机单独驱动车辆前进。仿真过程中,Simulink软件通过INPUT模块中Interface接口获取Cruise中车辆的信号,传给质量识别模块,进行整车总质量估计。

图6 空载工况仿真实验信号Fig.6 Simulation test signal of vehicle without load
质量在线估计算法仿真实验结果如图9所示,包括满载、半载、空载工况的识别结果。算法初始质量设置为满载质量48 800 kg,仿真结束时的质量识别结果如表3所示。由图9可见:空载工况和半载工况下,质量估计值分别在第30 s和第40 s接近真实值,随着算法运行稳定在真实值附近;满载工况下,由于初始质量设置与真实值相同,质量估计值始终在真实值附近,但前50 s内有一定波动。由于商用车总质量变化范围较广,算法有效识别质量需要一定迭代时间;由于换挡时无法进行质量估计,换挡过程对识别效率有一定影响;同时,换挡完成时扭矩突变会引起算法估计值波动。通过以上仿真实验,可见车辆质量在线识别算法较为有效,能够满足实际工程需求。

表3 整车总质量识别结果误差

图9 仿真实验质量识别结果Fig.9 Simulated results of mass estimation
5 实车验证
实车测试平台为一搭载机械式自动变速器的6×4混合动力牵引车,整车总质量为8 800 kg,如图10所示。将质量识别算法写入自动变速器控制单元(TCU)中,通过CAN总线获取车辆车速、发动机扭矩、电机扭矩、挡位等信息,采样周期为10 ms. 该TCU采用芯片式的陀螺仪传感器,其集成于TCU的印刷电路板上,单片机(MCU)通过芯片协议解析出车辆的姿态信息,从而获取坡度信息,输入到质量估计算法。

图10 测试车辆与TCUFig.10 Test vehicle and transmission control unit
考虑到安全因素,实车测试选择在空载工况下进行。图11、图12分别为试验所采集到的车辆状态信号和TCU估计出的整车总质量数据。测试开始30 s后算法估计得到的总质量接近真实值,之后稳定在真实值附近,误差基本控制在3%以内,满足TCU的控制需求。试验结果表明,质量在线估计算法可以有效识别整车总质量。
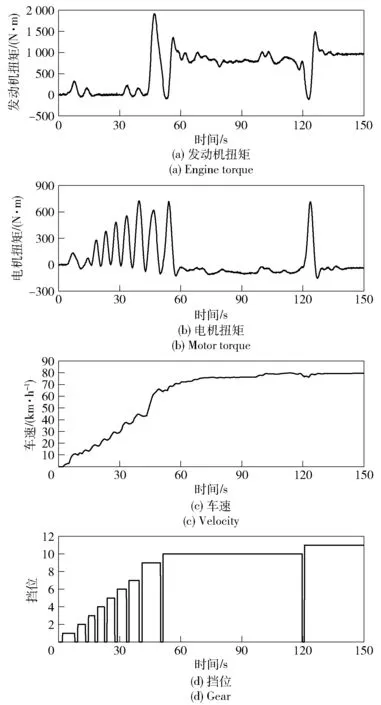
图11 实车试验信号Fig.11 Real vehicle test signal

图12 实车试验质量识别结果Fig.12 Estimated result of vehicle mass
6 结论
本文以单轴并联混合动力商用车为研究对象,针对整车总质量识别问题进行研究。通过分析整车纵向动力学模型,结合EKF和P2构型混合动力系统行驶工况信息,考虑算法运行的边界条件,处理车辆模型的非线性问题,提出了总质量在线估计算法。分别在Cuise、Simulink软件中建立整车仿真模型和控制策略,实现了软件联合仿真。
在车辆空载、半载、满载工况下,进行整车总质量在线估计的仿真实验,仿真结果表明所设计的算法能够有效识别整车总质量。在搭载AMT的6×4混合动力牵引车TCU中写入在线估计算法,在实车空载工况下进行质量识别试验,试验结果表明算法可准确估计整车总质量。本文所得识别结果可应用于重型车辆AMT换挡控制、整车能量管理、安全控制等。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年13期)2022-07-19
汽车实用技术(2022年12期)2022-07-05
汽车电器(2022年6期)2022-07-02
汽车实用技术(2022年2期)2022-02-21
汽车电器(2021年6期)2021-07-05
汽车零部件(2021年2期)2021-03-05
考试与评价·高二版(2020年4期)2020-09-10
宇航计测技术(2020年4期)2020-09-10