
含有纯约束分支的无耦合2T型并联机器人构型综合
2021-11-17 01:23张彦斌陈子豪王科明芦风林
北京工业大学学报 2021年11期
张彦斌,陈子豪,王科明,芦风林
(1.河南科技大学机电工程学院,河南 洛阳 471003;2.机械装备先进制造河南省协同创新中心,河南 洛阳 471003)
并联机器人又称为并联机构,是由动平台、静平台,以及连接2个平台的若干条分支运动链构成的一种空间闭回路结构.因其具有精度高、速度响应快、刚度大等优点,并联机器人已在现代诸多高端机器与精密仪器行业得到成功应用,也成为国际机构学和机器人领域研究的热点[1-2].绝大多数并联机器人的分支运动链数与其独立自由度数相同[3-4],即所有运动链均为主动分支,且每条分支中仅含有一个主动副.这种结构形式下,机器人的所有分支共同向动平台提供驱动力和承担外载荷.但也存在另外2种特殊情况,一种是机构分支数小于其自由度数,另一种则是分支数大于其自由度数.前者的优点在于机器人结构更加紧凑,构件间的干涉现象降低,有效增大工作空间,但至少1条分支中含有2个主动副,如六自由度3-UrRS机构[5].后者的显著特点是含有纯约束运动链,能够增加机构的刚度和承载力,同时也降低了对主动分支的结构约束要求,如3-UPS/S机构[6].所谓纯约束运动链是一种从动分支,其仅对机构动平台提供约束而不提供驱动力.尽管具有冗余主动分支并联机器人的分支数也大于其自由度数,如AirGait机构[7],但因其不含纯约束运动链,故未将其归类于上述情况.
构型综合方法是进行并联机器人创新设计的理论基础,直接决定着机器人的结构特点和运动特性.目前,国际上常用的并联机器人构型综合方法有:基于自由度计算公式的列举法[8]、基于GF集综合法[9]、基于方位特征集综合法[10-11]、基于位移离子群综合法[12]和基于螺旋理论综合法[13-14].为解决并联机器人的强运动学耦合性,Gogu[15]提出了基于线性变换理论的完全各向同性并联机器人构型综合方法,构造出多种自由度类型的解耦机构;张彦斌等[16]基于驱动力螺旋理论建立了无耦合2R型并联机器人的构型综合方法.
两自由度移动并联机器人作为并联机器人中自由度最少、结构最为简单的结构类型,在平面加工设备中具有良好的应用前景.目前,关于无耦合两自由度移动并联机器人,尤其是含有纯约束运动分支的无耦合两自由度移动并联机器人构型综合尤为少见.本文提出一种含有纯约束运动分支的无耦合2T型并联机器人的构型综合方法,实现了具有预期运动学特性机构的构型设计,并对综合出的2种新型并联机器人机构进行运动学分析,验证了所提出理论方法的正确性.
1 并联机器人动平台的运动特性分析
假定并联机器人中仅含有1条纯约束运动分支,那么对于非冗余驱动无耦合2T型并联机器人,其主动分支数目只能为2.为减小机器人的运动惯性和增强运动平稳性,设计要求主动副安装在定平台上,即每条主动分支的第1个运动副作为主动副.
并联机器人动平台的运动特性通常是以各分支运动链末端构件运动特性的交集来确定[17],即
(1)
式中:MP为动平台的运动输出特征矩阵;Mli为第i条分支运动链末端构件的运动输出特征矩阵;n为分支运动链的总数.
另外,也可先确定各分支运动链约束空间特性的并集,然后再求解动平台的运动输出特性[18],即
(2)
S=Sm⊕Sc
(3)
式中:Sc为动平台的约束空间特性;Sci为第i条分支的约束空间特性;Sm为动平台的运动空间特性;S为空间自由刚体的位形空间特性;⊕为直和符号.且有
dim(S)=dim(Sm)⊕dim(Sc)
(4)
式中dim(·)为空间的维数.在笛卡儿空间下自由度刚体的维数dim(S)=6.
并联机器人动平台的运动特性一般由分支运动链的运动特性或约束特性所决定.而无耦合并联机器人动平台的运动特性不仅与分支运动特性有关,还与各主动副通过分支运动链施加到动平台上的驱动力类型,以及所有分支驱动力间的耦合形式有关.对于无耦合2T型并联机器人,其动平台运动输出特性则直接取决于两主动副分别施加到动平台上的驱动力的类型及其耦合形式.
并联机器人分支驱动力的类型包括线力矢和偶力矢.当作用在动平台上的驱动力仅有2个时,动平台可能具有的运动特性如表1所示.根据表1可知,只有施加在机器人动平台上的2个驱动力为线力矢时,才能驱动动平台做二自由度平面移动,且2个线力矢不能平行.若施加在动平台上的力为线力矢和偶力矢的组合,或者2个力均为偶力矢,都不能驱动其做二维移动.

表1 机构动平台运动输出特性与分支驱动力特性之间的关系Table 1 Relationship between the output characteristics of the moving platform and the characteristics of the limb actuation force
2 主动分支运动链的结构综合
2.1 机构输入- 输出运动间的数学模型
若并联机器人的自由度为n,那么其动平台输入-输出速度间的运动学表达式可写为
(5)
式中


根据式(5)可知,正雅可比矩阵Jdir由各分支的驱动力螺旋$ai构成,而逆雅可比矩阵Jinv为对角阵,且对角线上的元素分别为同一条分支的驱动力螺旋$ai与主动运动螺旋$i1的互易积.因此,根据式(5)可写出2T型并联机器人的速度表达式,即
(6)
令ki=$ai°$i1,若满足条件ki≠0,则式(6)可改写为
(7)
对于无耦合2T型并联机器人,因其输入-输出速度之间存在一一对应的线性映射关系,故雅可比矩阵必为对角阵.因此,机构输入-输出运动之间的数学模型为
(8)
式中:ζ1=La1/k1;ζ2=Ma2/k2.
2.2 第1条主动分支的结构综合
设定坐标系O-XYZ固接于机器人定平台,动坐标系o-xyz固接于动平台,且两坐标系的3个坐标轴对应平行,如图1所示.令第1条主动分支独立驱动动平台沿X轴方向移动,而其他主动分支在此方向上不提供驱动力.

图1 主动分支的驱动力螺旋与主动螺旋Fig.1 Actuation screws and actuated screws of active limb
由于要求机构动平台具有无耦合运动特性,因此式(8)中雅可比矩阵对角线上的第一个元素ζ1必不为零,故有La1≠0,且Ma1=0.同时,根据式(6)~(8)可知,机器人输入与输出速度之间的运动传递与分支驱动力螺旋$a1的方向矢量在Z轴上的分量Na1无关,即可取Na1=0.那么该主动分支的主动副施加到动平台上驱动力螺旋$a1的形式为
(9)
式(9)表明驱动力螺旋$a1是一条平行于x轴的零节距螺旋,即为沿x轴方向的一个线力矢,见图1.该驱动力螺旋轴线必然通过o-yz平面上一点A(0,ya1,za1),则有Qa1=za1,Ra1=-ya1.
在一般机构位形下,其运动传递必不能失真,因此元素ζ1既不能为零也不能趋于无穷大,故有
k1=$a1°$11≠0
(10)
式中,$11为第1条主动分支的主动螺旋,其形式可能为无穷大节距螺旋或零节距螺旋.
1)当$11为无穷大节距螺旋时
这种情况下,$11=[0 0 0;L11M11N11],将$11代入式(10)得
k1=L11≠0
(11)
式(11)表明,k1值仅与主动螺旋$11的方向矢量在X轴上的分量L11有关,而与其在另外两坐标轴上的分量无关,故可取L11=1,M11=N11=0.因此,可确定出该分支主动螺旋的形式为
(12)
显然,第1条主动分支的主动螺旋可为平行于X轴的无穷大节距螺旋(见图1),即该分支主动副可选取沿X轴方向运动的移动副.

类型Ⅰ-1 平行于X轴的零节距螺旋,如果存在此类形式螺旋,其数量至少为2,最多为3,且2个螺旋之间不能插入其他零节距螺旋.
类型Ⅰ-2 垂直于X轴的无穷大节距螺旋,其数量最多为2,此类螺旋可插入任意位置.
类型Ⅰ-3 与驱动力螺旋$a1轴线相交的零节距螺旋为惰性螺旋(idle screw),其数量最多为2.
2)当$11为零节距螺旋时

k1=P11+za1M11-ya1N11≠0
(13)
根据式(13)可知,k1的值仅与$11的方向矢量在Y轴和Z轴的分量有关,而与其在X轴上的分量无关,故取L11=0.因$11固接于定平台,可令其转动轴线过定坐标系原点,于是得P11=Q11=R11=0.那么,式(13)可进一步简化为
k1=za1M11-ya1N11≠0
(14)
式(14)中的坐标参数ya1和za1为变量,其数值随着机构的运动而发生变化,且在一般机构位形下均不为零.若式(14)中参数M11和N11均不为零,可能出现k1=0的情况,这与要求相悖,故两者之一可取为1,另一个则为0.又因M11和N11仅决定了主动螺旋$11的轴线方向,而不会改变其性质,这里取M11=1、N11=0.于是可确定出这种情况下第1条分支主动螺旋的形式,即
(15)
同理,根据驱动力螺旋与非主动螺旋互易积为零的特性和螺旋的线性相关条件,可确定出所有非主动螺旋的类型和数量,具体如下:
类型Ⅱ-1 平行于X轴的零节距螺旋,若存在这种螺旋,其数量至少为2、最多为3.
类型Ⅱ-2 与驱动力螺旋$a1相交且平行于Y轴的零节距螺旋,其数量有且仅有1个,并与主动运动螺旋相邻.
类型Ⅱ-3 垂直于X轴的无穷大节距螺旋,其数量最多为2.
类型Ⅱ-4 与驱动力螺旋$a1轴线相交且垂直于Y轴的零节距螺旋,其数量最多为1.
当分支主动螺旋和非主动螺旋确定后,可根据分支连接度的不同列举出所有结构形式的运动链结构,其中基本的分支结构类型有:2P、2P1R、1P3R、2P2R、2P3R、1P4R、5R、1P5R、2P4R和6R型.通过将基本分支中相邻运动副的组合可得到含有C副、U副和S副的运动链结构.另外,基本分支中的P副可用一个Pa副(由4个轴线平行的R副组成平行四边形结构)替换;而2个相邻且轴线平行的P副和R副则可由一个Pu副(由2个轴线平行的R副和2个U副组成的平行四边形结构)替换,可得到含有平面闭回路结构的新型分支运动链.


表2 第1条主动分支运动链的类型及结构Table 2 Type and structure of the first active limb kinematic chain

续表2
2.3 第2条主动分支的结构综合
设第2条主动分支仅为动平台沿Y轴方向的移动提供驱动力.根据机构速度雅可比矩阵对角线上第2个元素ζ2为非零的条件,可写出该分支驱动力螺旋$a2的形式为
(16)
即$a2为平行于Y轴的线力矢,且其必过o-xz面上一点B(xa2,0,za2),则有Ra2=xa2、Pa2=-za2.
由于雅可比矩阵中元素ζ2必须为非零实数,故可得
k2=$a2°$21=Q21-za2L21+xa2N21≠0
(17)

为使得式(17)在机构一般位形下均成立,那么该分支的主动螺旋$21的形式应为
(18)
根据式(18)可知,主动螺旋$21的形式既可为平行于Y轴的无穷大节距螺旋,也可为平行于X轴的零节距螺旋.
同样,根据主动螺旋与驱动力螺旋之间的关系,能够确定出分支中所有可行非主动运动螺旋的具体类型和数目.
1)当$21为无穷大节距螺旋时
这种情况下,分支中非主动运动螺旋的可能形式为:
类型Ⅰ-1 平行于Y轴的零节距螺旋,如果存在此类形式螺旋,其数量至少为2,最多为3.
类型Ⅰ-2 垂直于Y轴的无穷大节距螺旋,其数量最多为2,且两螺旋的轴线不能平行.
类型Ⅰ-3 与驱动力螺旋$a2轴线相交的零节距螺旋,为惰性螺旋,其数量最多为2.
2)当$21为零节距螺旋时
此时,分支非主动运动螺旋的形式为:
类型Ⅱ-1 与驱动力螺旋$a2相交且平行于X轴的零节距螺旋,其数量有且仅有1个.
类型Ⅱ-2 平行于Y轴的零节距螺旋,若存在这种螺旋,其数量至少为2,最多为3.
类型Ⅱ-3 垂直于Y轴的无穷大节距螺旋,其数量最多为2.
类型Ⅱ-4 与驱动力螺旋$a2轴线相交且垂直于X轴的零节距螺旋,为惰性螺旋,其数量最多为1.
当主动和非主动运动螺旋确定后,按照分支连接的不同即可列举出所有可行运动链结构.因与第1条分支具有相同的拓扑结构形式,将表2中运动副符号的下标x和y对调便可得到第2条分支的结构形式.
3 纯约束运动分支的结构综合
由于纯约束运动分支仅对机器人动平台提供约束而不提供驱动力,故其结构上的关键功能是将动平台限定在一个平行于坐标面XOY的平面内.因此,纯约束运动链的基础运动螺旋系为
(19)
式(19)表明两螺旋分别平行于X、Y轴的无穷大节距螺旋.
根据式(19)可求出基础运动螺旋系的约束螺旋系,有
(20)
纯约束运动分支至少需约束掉动平台沿Z轴方向的移动自由度,故式(20)中约束螺旋$r4必然存在,而其他3个约束螺旋则不一定存在.所以根据式(19)(20)可确定出纯约束运动链中运动螺旋类型及数目,具体为:
类型1 垂直于Z轴的无穷大节距螺旋,其数量最多为2.
类型2 平行于Z轴的零节距螺旋,其数量最多为3,但当其数量为1时,该螺旋为惰性螺旋.
类型3 垂直于Z轴的零节距螺旋,为惰性螺旋,其数目最多为2,且两螺旋轴线不能平行.
同理,按照分支连接度的不同列举出纯约束运动分支的所有结构形式,如表3所示.
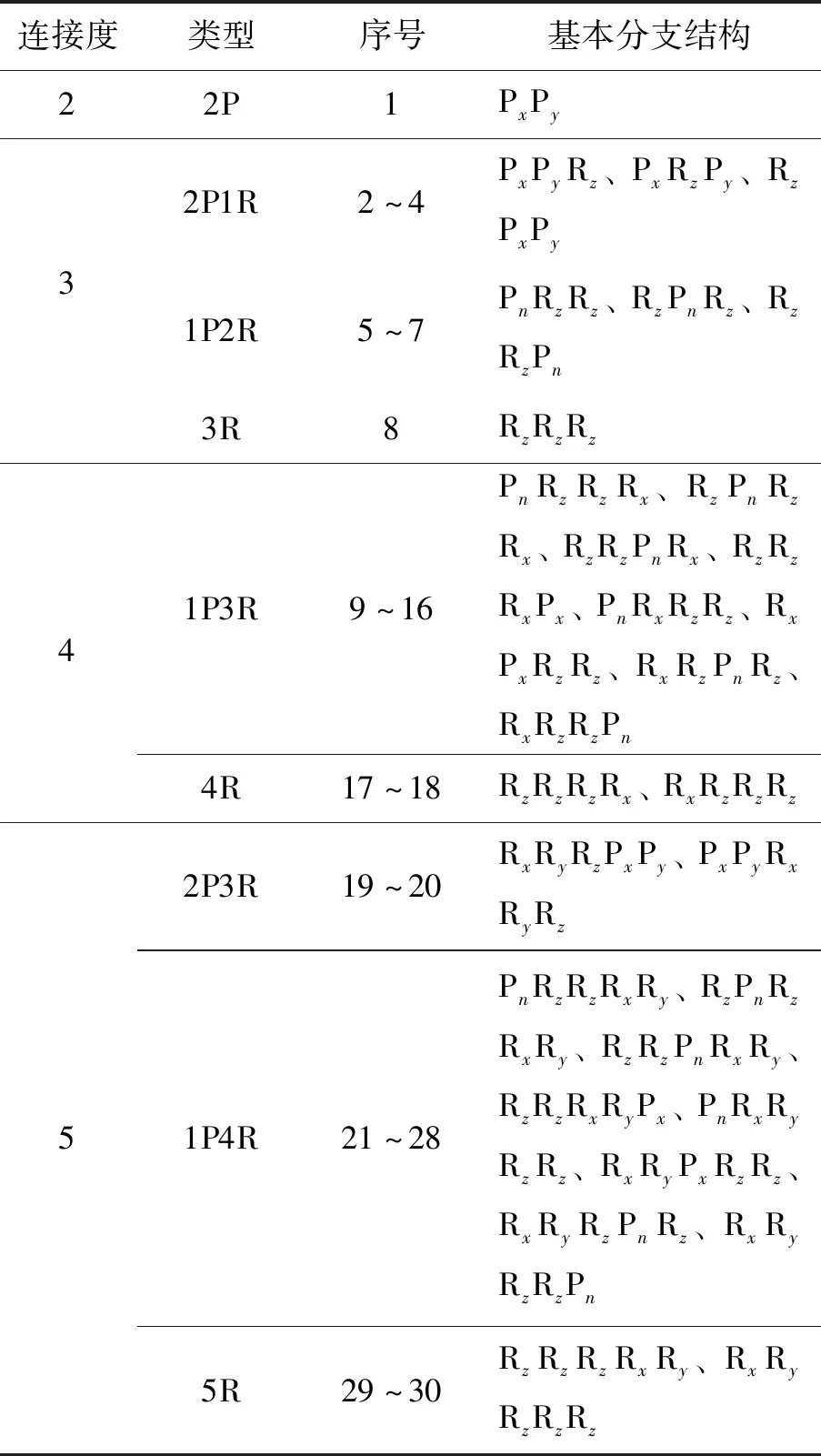
表3 纯约束运动分支运动链的类型及结构Table 3 Type and structure of the constraint limb kinematic chain
表3中,不含惰性副的基本形式有3种,即2P、1P2R和3R型.其中仅给出了基本运动链的结构形式,如果将相邻运动副合并或进行运动副替换,则可得到含有多自由度运动副或平面闭回路结构的分支运动链,这里不再具体列举.
4 无耦合2T型并联机器人的构型综合
当所有分支运动链都综合完成后,从表2任取2条运动链作为主动分支并从表3中取出1条运动链作为纯约束分支,然后按照相应的配置方位将动平台和定平台连接起来,即可得到二自由度无耦合移动并联机器人机构.为保证所综合出的机构具有预期的运动学特性,3条分支的选取和装配必须满足下述条件:
1)3条分支运动链的连接度之和(即分支中所有运动副的自由度之和)应小于等于14;
2)若分支中含有惰性副,3条运动链中的转动副不允许存在轴线平行的情况;
3)为使得机构具有较好对称性,以及便于加工制造和降低生产成本,2条主动分支尽可能选取同一种结构形式.
根据上述原则,理论上共可以综合出2 380种具有较好对称结构形式的无耦合2T型并联机器人,其中78种不含有惰性运动副.需要注意的是,当2条主动分支的连接度均小于或等于3时,不需要约束分支也能构成2T型并联机器人.但相较于两分支2T型并联机器人,含有纯约束运动分支的机构不仅能增加机器人的承载能力和稳定性,还能够降低主动分支的结构约束要求.
例如,从表2中选取RURR型运动链作为2条主动分支,再从表3中选取RRR型运动链作为纯约束分支,则可构成三分支2-RURR/RRR型并联机器人,如图2所示.

图2 2-RURR/RRR型并联机器人Fig.2 2-RURR/RRR parallel robot
当选取两主动分支中的第1个R副为主动副时,可推导出其速度方程,即
(21)

根据式(21)可知,机构雅可比矩阵为对角阵,因此主动关节输入速度矢量和动平台输出速度矢量之间存在一对一的控制关系,即该机器人具有无耦合运动学特性.
若分别从表2、3中选取CPR和RPR型运动链作为2条主动分支和纯约束分支,可得到新型2-CPR/RPR并联机器人机构,如图3所示.

图3 2-CPR/RPR型并联机器人Fig.3 2-CPR/RPR parallel robot
当取两C副中的线性位移作为主动输入时,机构的速度方程为
(22)

式(22)表明该机构雅可比矩阵为单位阵,其运动条件数恒等于1,所以该并联机器人在整个工作空间具有完全各向同性的运动学性能.
5 机构自由度特性分析
为验证所综合出机器人机构均具有预期的自由度特性,下面将以图3所示2-RURR/RRR型并联机器人为例,对其进行自由度分析和计算.
根据图3机构第1条分支运动链的配置形式可写出其分支运动螺旋系为
(23)
式中:$ij为第i条分支中第j个单自由度关节的运动螺旋;aij、bij和cij为对应关节轴线的位置参数,并不需要求出其具体数值.
利用互易积原理,根据式(23)可求出第1条主动分支的约束螺旋,即
(24)
(25)
式(25)表明该分支同样约束了动平台绕Z轴的转动自由度.
而机构纯约束分支的运动螺旋系可写为
(26)
利用互易积原理求出式(26)的约束螺旋系为
(27)
因此,3条分支共同约束了动平台绕X、Y、Z三个轴线方向的转动自由度和沿Z轴方向的移动自由度,故该机构动平台仅具有沿X、Y轴方向移动自由度.
而并联机器人机构的自由度数可利用G-K修正公式进行计算,即
(28)
式中:M为机构的自由度数;d为机构的阶数,其中d=6-λ,为公共约束数;n为构件数;g为运动副的个数;fi为第i个运动副的自由度;v为冗余约束数;ζ为局部自由度数.
对于图3所示机构,其各参数分别为λ=0、d=6、n=10、g=11、v=1、∑fi=13、ζ=0.将上述参数代入式(28)得M=2,即该机构仅具有2个自由度.
上述分析表明,图3所示2-RURR/RRR并联机器人仅有2个自由度,且其分别为沿X、Y轴方向移动,从而验证了本文所综合出机构均具有预期的自由度特性.
6 结论
1)本文提出一种含有纯约束运动链的无耦合二维移动型并联机器人的构型综合方法,并基于该方法实现了三分支二自由度移动并联机器人的设计,得到78种不含有惰性副的新型机构.所综合出的机构具有结构简单、运动解耦性好、控制设计容易等特点.
2)2种机构的实例分析表明,利用本文提出的构型综合方法所设计出并联机器人均具有无耦合运动学特性,且仅具有2个移动自由度,从而验证了该方法的正确性和有效性.
猜你喜欢
北京航空航天大学学报(2022年7期)2022-08-06
黑龙江大学自然科学学报(2022年1期)2022-03-29
计算机系统应用(2021年10期)2022-01-06
商用汽车(2021年12期)2021-07-14
劳动保护(2019年3期)2019-05-16
电机与控制学报(2018年9期)2018-05-14
智富时代(2017年7期)2017-09-05
智富时代(2017年7期)2017-09-05
商业经济(2016年3期)2016-12-23
疯狂英语·口语版(2013年1期)2013-01-31
