
智能化无人开采工作面适用性多层次模糊综合评价研究
2021-11-20 08:48张科学王晓玲何满潮尹尚先李首滨孙健东程志恒赵启峰殷帅峰朱俊傲杨海江
采矿与岩层控制工程学报 2021年1期
张科学,王晓玲,何满潮,尹尚先,李首滨,孙健东,李 东,程志恒,赵启峰,殷帅峰,亢 磊,朱俊傲,杨海江
( 1.华北科技学院 智能化无人开采研究所,北京 101601;2.中国矿业大学( 北京 ) 深部岩土力学与地下工程国家重点实验室,北京 100083;3.煤炭科学研究总院,北京 100013;4.华北科技学院 安全工程学院,北京 101601;5.中国矿业大学( 北京 ) 煤炭资源与安全开采国家重点实验室,北京100083;6.煤矿安全高效开采省部共建教育部重点实验室( 安徽理工大学 ),安徽 淮南 232001 )
当今煤炭行业迅速迈入智能化发展阶段,为保障煤炭智能化开采的安全性和高效性,对煤炭智能化无人开采的影响因素提出了严格要求。
王国法[1]等总结了不同煤层所适用的智能化综采技术,提出了综采装备适应的5项关键技术,对于未来智能化无人开采更要突破的关键技术装备进行了展望;任怀伟[2]等通过分析数据、构建智慧矿山信息模型,实现了在不同的地质条件下能够稳定开采;范京道[3]等根据黄陵一号煤矿智能开采的实践和经验,改善了工作面智能化控制系统,实现了一系列的自动化生产;李首滨[4]提出了未来会朝智能自适应开采模式逐步发展演变,智能化无人开采工作面最终会以成熟的技术和完善的装备实现;王国法[5]等提出了智能化综采的概念以及内涵,研究了不同技术在地质条件不同情况下的应用,展望了智能化无人开采方向未来的研究重点;黄曾华[6]从几个方面对可视远程干预无人化开采技术进行深入分析,根据“无人操作、有人巡视”的开采理念,并结合各种先进的控制技术,研发了一套高效的智能决策联动控制系统,为实现智能化无人开采提供了探索研究的基础;王国法[7]等明确了智能化无人开采技术的发展方向,提出了智能化无人开采建设的总目标和阶段性实现目标及发展路径;张科学[8-9]等基于3种计算方法确定了可视远程干预型智能化无人开采和自适应型智能化无人开采2个技术阶段,提出了综采工作面智能化开采的5个关键技术和关键参数,发现了工作面调斜控制的内在根本原因及外在诱发原因,在计算的误差范围内解决了关于满足综采智能化工作面调斜控制技术的现场需要;王国法[10]等通过对我国煤矿综合机械化、自动化和智能化发展现状的总结和煤矿智能化发展的基础理论,深入剖析了其中的研究难点和关键技术,提出4种新型开采模式,指明了不同开采模式的核心技术以及开采效果,基于智能化无人开采发展的基本原则和发展模式,提出自己的思考与相关政策建议;澳大利亚目前正在研究远程控制的全自动无人长壁工作面开采技术[11]。以上这些研究只对智能化开采中的某项问题提出了具体的分析和展望,而智能化无人开采需要综合各项影响因素,提高经济效益和社会效益。
在煤炭开采过程中,地质条件是影响煤炭开采的最主要因素。其次,巷道的布置体系,以及所用的采煤工艺、装备、技术等,同样会对开采的难度、速度、效率有所影响。不仅如此,在安全生产过程中,信息和安全的保障体系,以及人员的组织管理也是重要的影响因素。综上,笔者基于层次分析法的模糊综合评价方法[12-13],根据智能化开采过程存在的开采问题,确定了地质条件、巷道布置体系、开采参数、采煤工艺、装备配套、关键技术、保障体系和组织管理等8个影响因素,将影响智能化无人开采工作面适用性的各个影响因素作为多层次的模糊集合,根据模糊集合隶属度计算结果定量评价智能化无人开采工作面的适用性。
1 模糊综合评价模型的建立
为了尽可能与实际情况保持一致,在构建模糊综合评价模型时,多采用层次分析法[14]。将现有的评价标准和实际测量值,经过模糊变换处理后,对事件进行综合评价,即模糊综合评价。综合评价问题需要满足3个条件:
③ 进行单因素评价时,是从U到V的一个模糊映射f :U® V,即选定一个单因素∈U,使存在一个模糊评价集 B(U )Îf (V )一一映射获得一个模糊关系矩阵R,以

表示,于是称( U,V,R )为综合评价数学模型[15]。
在所有的评价因素集中,由于不同的评价因素对评价结果的影响程度也不相同,为了准确表示影响程度的大小,定义了1个因素权重集A,将A作为U的因素重要程度模糊子集,表达式为

其中,Ai为Ui对A的隶属度[15]。
若已知模糊关系矩阵U和各因素重要程度模糊子集A,则对该评价对象的模糊综合评价结果[12-15]为


对于任意项bj为智能化无人开采工作面适用性的综合评价j级的隶属度[14],由最大隶属原则[17]可知,若,定义bk为最大隶属度指数x,则智能化无人开采工作面适用性可评价为k级别[15]。
2 智能化无人开采工作面适用性多层次模糊综合评价
由模糊综合评价模型的基本原理可知,需要确定评价因素集、评价集和模糊关系矩阵对智能化无人开采工作面适用性是否良好进行评价。
2.1 确定评价因素集
影响智能化无人开采工作面适用性的因素有多方面,为了充分考虑影响因素指标本身的科学性、准确性、针对性、有效性和可取性,同时能够反映最关键的影响因素,选取以下8个影响因素作为智能化无人开采工作面适用性的一级指标,即:地质条件( A1)、巷道布置体系( A2)、开采参数( A3)、采煤工艺( A4)、装备配套( A5)、关键技术( A6)、保障体系( A7)和组织管理( A8)。
( 1 ) 地质条件
煤炭开采过程中不仅矿体赋存条件多种多样,而且地质条件复杂多变,因此在地质条件允许的情况下,探索智能化无人开采工作面的适用性,应着重考虑地质条件的煤层埋深、煤层厚度、煤层倾角、煤层顶底板稳定性、构造复杂度。
( 2 ) 巷道布置体系
科学合理的工作面巷道布置对矿井安全生产和经济效益起到关键性作用。通过结合自动成巷无煤柱开采新技术[16-20],智能化无人开采工作面巷道布置体系的方式分为121,110和N00工法巷道布置体系。
( 3 ) 开采参数
智能化无人开采工作面的几何参数主要有:工作面采高、工作面倾向长度、工作面走向长度和工作面区段煤柱。工作面采高主要由煤层厚度决定;工作面倾向长度主要由地质、生产技术和经济及管理因素决定;工作面走向长度主要由采( 盘 )区大小决定;工作面区段煤柱不仅是衡量一个采区开采率的重要标准,而且也是煤炭安全生产的重要指标。
( 4 ) 采煤工艺
智能化无人开采工作面存在着智能放煤难控制、液压支架自动难找直、刮板输送机自动难调斜等工艺类难题[9,21-22]。因此,合适的采煤工艺对智能化无人开采具有至关重要的作用。目前,智能化无人开采工作面的采煤工艺主要有综采工艺和综放工艺2种方式。
( 5 ) 装备配套
选择正确的智能化无人开采工作面装备,既可以确保工作面的生产能力,也可以提升工作面设备技术水平。主要的配套技术有采煤机配套技术、液压支架配套技术、刮板输送机配套技术和其他装备配套。选择合理的配套技术有助于煤矿安全高效生产。
( 6 ) 关键技术
智能化无人开采工作面有较多技术难题亟待解决,比如智能化工作面调斜( 调工作面伪倾斜 )问题、调直( 调工作面直线度 )问题、调平( 调液压支架平衡千斤顶 )问题、连续推进问题等,其严重影响了智能化无人开采工作面的技术进步及大面积推广[21-24]。智能化无人开采的关键性技术包括:工作面调斜控制技术、工作面调直控制技术、工作面俯仰采控制技术和工作面连续推进控制技术。
( 7 ) 保障体系
信息保障体系是智能化无人技术成功实践的关键。安全保障体系全程跟踪智能化无人工作面的工作过程及进行数据监测。故选取信息保障体系和安全保障体系作为评价指标。
( 8 ) 组织管理
组织管理主要体现在以下几个主要方面:精细化管理、标准化管理、安全监察管理、员工素质管理和其他管理。标准化管理是无人综采技术管理保障的重要组成部分;安全监察管理在无人综采过程中,负责对安全措施的落实以及操作规程的贯彻执行;员工素质管理是实现智能化无人开采成败的关键性因素;其他管理则与上述另外几种组织管理相辅相成。
通过8个一级指标类比可以得到智能化无人开采工作面适用性的二级指标集合,具体公式为

式中,A11为煤层埋深;A12为煤层厚度;A13为煤层倾角;A14为煤层顶底板稳定性;A15为构造复杂度;A21为121工法巷道布置体系;A22为110工法巷道布置体系;A23为N00工法巷道布置体系;A31为工作面采高;A32为工作面倾向长度( 工作面长度 );A33为工作面走向长度;A34为工作面区段煤柱;A41为综采工艺;A42为综放工艺;A51为采煤机配套技术;A52为液压支架配套技术;A53为刮板输送机配套技术;A54为其他配套技术;A61为工作面调斜控制技术;A62为工作面调直控制技术;A63为工作面俯仰采控制技术;A64为工作面连续推进控制技术;A71为信息保障体系;A72为安全保障体系;A81为精细化管理;A82为标准化管理;A83为安全监察管理;A84为员工素质管理;A85为其他管理。
2.2 确定评价集
为适合现场情况,充分评价智能化无人开采工作面的适用性,建立一个具有一定范围的评价集,即:,其中,V1表示智能化无人开采工作面适用性好;V2表示智能化无人开采工作面适用性较好;V3表示智能化无人开采工作面适用性一般;V4表示智能化无人开采工作面适用性差。
2.3 模糊评价中的多层次分析
本文所涉及的一级评价影响因素有8个,二级影响因素有29个,仅基于单层次的综合模糊评价模型,很难确定每个因素在评价中所占比例,从而难以精准分配权重,物理意义也难以辨析,因此,应用多层次的模糊综合评价模型。将多层次模糊综合评价应用到本文,其模型如图1所示。
2.4 确定各级评价因素的权重
使用模糊综合评价确定各级评价因素的权重是实现定性评价到定量评价过渡的重要环节,权重是否科学合理直接影响最后评价结果的准确性。现有的确定权重的方法有多元统计分析法、神经网络分析法、灰色关联分析法、功效系数法、层次分析法、指数加权法等。笔者团队根据需要应用层次分析法( 简称AHP法 )来确定各因素之间的权重值[14]。基本方法:通过层次分析法建立判断矩阵,根据判断矩阵来计算各个因素的权重值,判断矩阵见表1。

表1 判断矩阵Table 1 Judgment matrix
判断矩阵B中的元素bij表示以某一A为判断准则,要素Bi对Bj的相对重要度,即

其中,wi表示要素Bi的重要性量度值;wj表示要素Bj的重要性量度值。上述数值判断矩阵主要是通过1~9标度方法来量化要素重要性[14-15]。判断矩阵标度及其含义见表2。
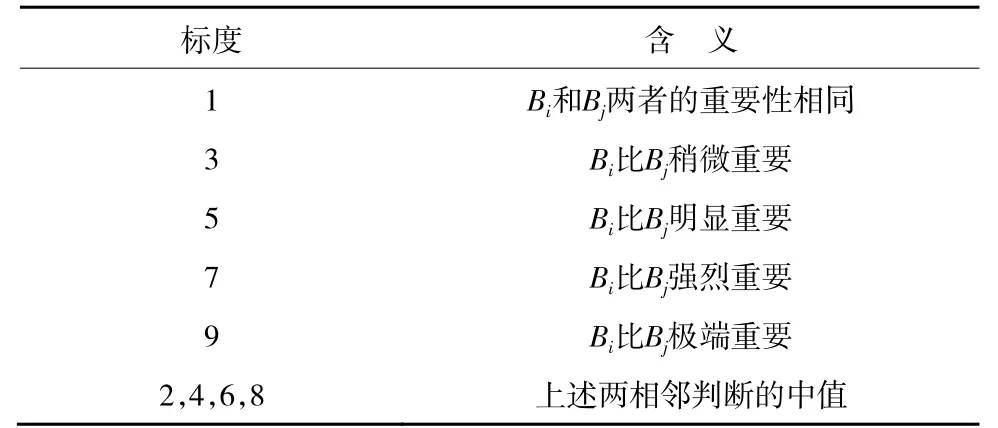
表2 判断矩阵标度及其含义Table 2 Judgment matrix scale and its meaning

图1 智能化无人开采工作面适用性的多层次模糊综合评价模型AFig.1 Multi-level fuzzy comprehensive evaluation model A for the applicability of intelligent unmanned mining face
层次分析法确定权重的步骤[14]如下:
( 1 ) 构造判断矩阵A。
( 2 ) 判断矩阵的权重及最大特征根λmax。
① 计算判断矩阵每一行元素的乘积Mi。

② 计算Mi的n次方根


④ 计算特征向量的最大特征根λmax。

式中,(AW )i表示向量AW 的第i个元素。

( 3 ) 判断矩阵的一致性检验。
① 计算一致性指标CI。

② 计算平均随机一致性指标CR。

式中,RI表示同阶平均随机一致性指标,其值见表3。

表3 同阶平均随机一致性指标Table 3 Mean random consistency index of the same order
当CR≤0.1时,可以认定判断矩阵与实际情况具有满意的一致性,说明权重的选取是合理的;当当CR>0.1时,认为判断矩阵与实际情况不具有一致性,需要重新确定判断矩阵,直到判断矩阵与实际情况具有满意的一致性为止。
2.5 建立模糊关系矩阵
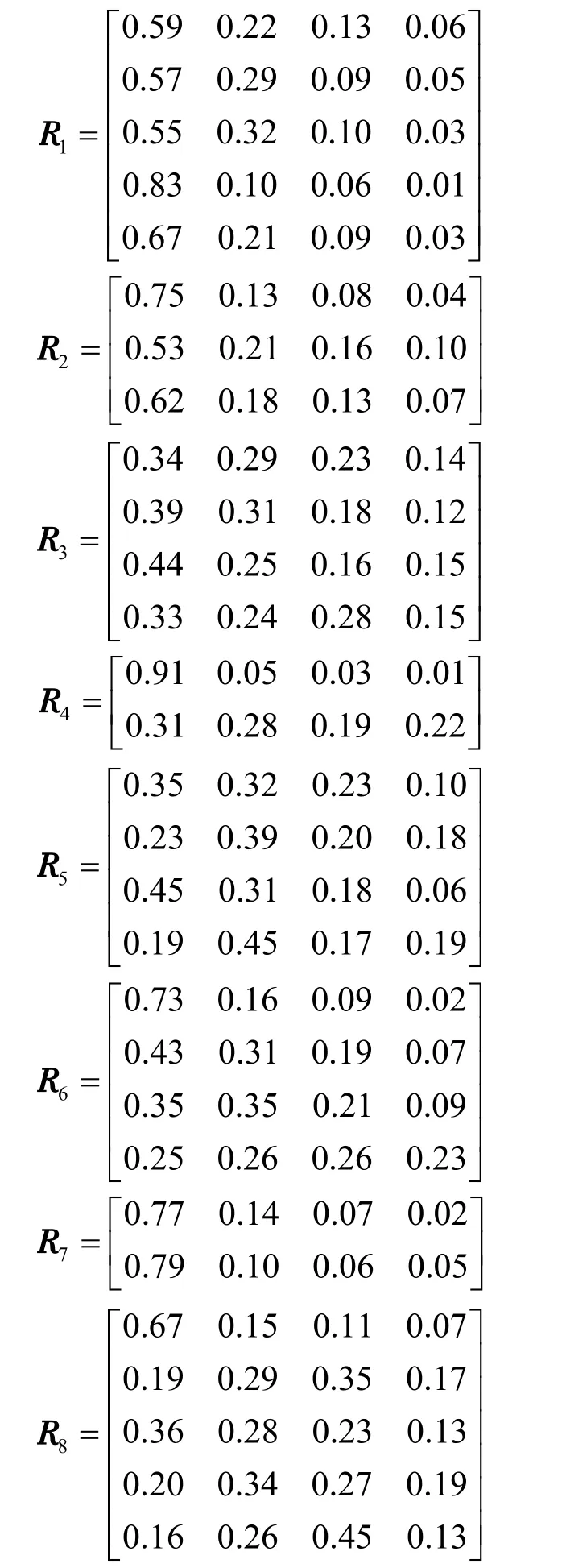
由于每一个单因素评价是隶属关系矩阵的基础,因此在多个影响因素中,通过对其中1个具有代表性的影响因素作为评价因素进行评价,就可以确定单因素评价集。确定隶属函数的方法主要有专家评分法、模糊统计法等,隶属函数的选取是否合理直接影响评价结果的准确性。矿井的地质条件复杂多变,对因素集U中的各因素很难确定一致的隶属函数,所以通常采用专家评分法来建立模糊关系矩阵,邀请业界具有权威的专家和相关的工程技术人员根据评价等级V进行打分[12-14],即对因素集U中的每一个因素进行单独评价,再通过统计各评价等级打分的比例,从而得到此因素各评价等级对应的比例,分析各个因素的评价等级比例可以得出相应的模糊关系矩阵R。
3 工程实例分析
以陕西陕煤黄陵矿业有限公司1号煤矿802工作面为例进行分析,1号煤矿802工作面煤层厚度1.5~3.2 m,平均煤层厚度约2.4 m,煤层埋深约314 m,占地面积约302 445 m2,工作面推进长度1 287 m,煤倾角1°~5°。结构简单,属于稳定煤层。基本顶由细粒砂岩和粗砂岩组成,厚度5.79~11.98 m,平均厚度约7.89 m;直接顶由粉砂岩和泥岩组成,厚度9.18~11.79 m,平均厚度约10.45 m;2号煤煤层厚度1.5~3.2 m,平均厚度约2.4 m;底板为泥岩和粉砂岩,厚度2.85~5.91 m,平均厚度约3.95 m。
3.1 确定模糊综合评价影响因素权重
确定模糊综合评价一级影响因素权重的方法如下:
( 1 ) 构造判断矩阵A。
构造判断矩阵A,详见表4。
( 2 ) 由式( 2 )~( 5 )计算可得,矩阵的最大特征值为,一级影响因素的权重为


表4 判断矩阵ATable 4 Judgment matrix A
( 3 ) 由式( 6 )和( 7 )计算可得,C R =0.07<0.1,经判断矩阵一致性检验可知,A 具有满意的一致性。
同理可得,智能化无人开采工作面适用性的模糊综合评价的二级影响因素权重。
( 1 ) 判断矩阵A1。
判断矩阵A1详见表5。

表5 判断矩阵A1Table 5 Judgment matrix A1

由式( 6 )和( 7 )计算可得,C R =0.09<0.1,经判断矩阵一致性检验可知,A1具有满意的一致性。
( 2 ) 判断矩阵A2。
判断矩阵A2详见表6。

表6 判断矩阵A2Table 6 Judgment matrix A2

由式( 6 )和( 7 )计算可得,C R =0.04<0.1,经判断矩阵一致性检验可知,A2具有满意的一致性。
( 3 ) 判断矩阵A3。
判断矩阵A3详见表7。

表7 判断矩阵A3Table 7 Judgment matrix A3

由式( 6 )和( 7 )计算可得,C R =0.05<0.1,经判断矩阵一致性检验可知,A3具有满意的一致性。
( 4 ) 判断矩阵A4。
判断矩阵A4详见表8。

表8 判断矩阵A4Table 8 Judgment matrix A4

由式( 6 )和( 7 )计算可得,C R =0.00<0.1,经判断矩阵一致性检验可知,A4具有满意的一致性。
( 5 ) 判断矩阵A5。
判断矩阵A5详见表9。

表9 判断矩阵A5Table 9 Judgment matrix A5

由式( 6 )和( 7 )计算可得,C R =0.03<0.1,经判断矩阵一致性检验可知,A5具有满意的一致性。
( 6 ) 判断矩阵A6。
判断矩阵A6详见表10。
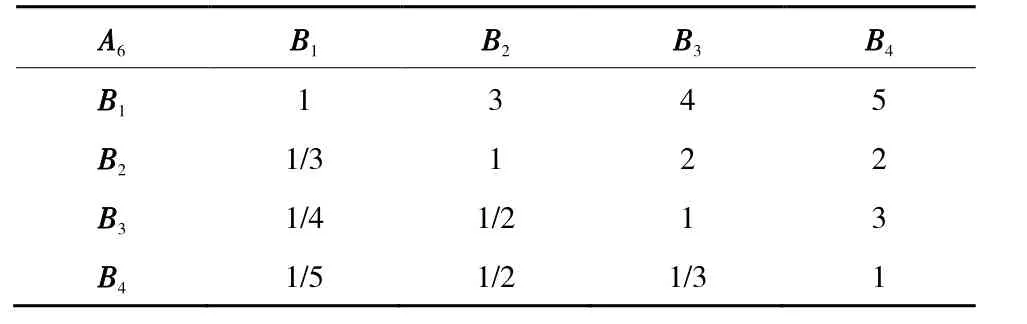
表10 判断矩阵A6Table 10 Judgment matrix A6
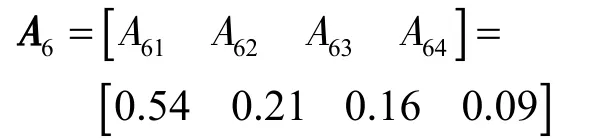
由式( 6 )和( 7 )计算可得,C R =0.05<0.1,经判断矩阵一致性检验可知,A6具有满意的一致性。
( 7 ) 判断矩阵A7。
判断矩阵A7详见表11。,评价因素的权重为

表11 判断矩阵A7Table 11 Judgment matrix A7
由式( 2 )~( 5 )计算可得,

由式( 6 )和( 7 )计算可得,C R =0.00<0.1,经判断矩阵一致性检验可知,A7具有满意的一致性。
( 8 ) 判断矩阵A8。
判断矩阵A8详见表12。
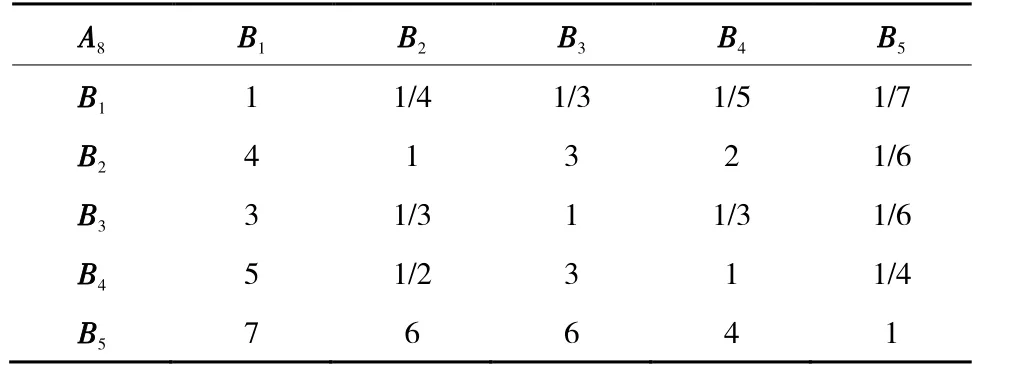
表12 判断矩阵A8Table 12 Judgment matrix A8

由式( 6 )和( 7 )计算可得,C R =0.08<0.1,经判断矩阵一致性检验可知,A8具有满意的一致性。
通过专家评分法确定的8个单因素评判矩阵分别为
3.2 模糊综合评价
3.2.1 一级模糊综合评价
令


将计算得到的B1,B2,B3,B4,B5,B6,B7,B8作为上一级评价判断矩阵R,并经过模糊模型变换。
3.2.2 二级模糊综合评价
已知

通过分析陕西陕煤黄陵矿业有限公司1号煤矿802工作面的评价影响因素,并且根据最大隶属度关系原则可知:1号煤矿802工作面的最大隶属度指数x= 0.64,其隶属度指数评价如图2所示。
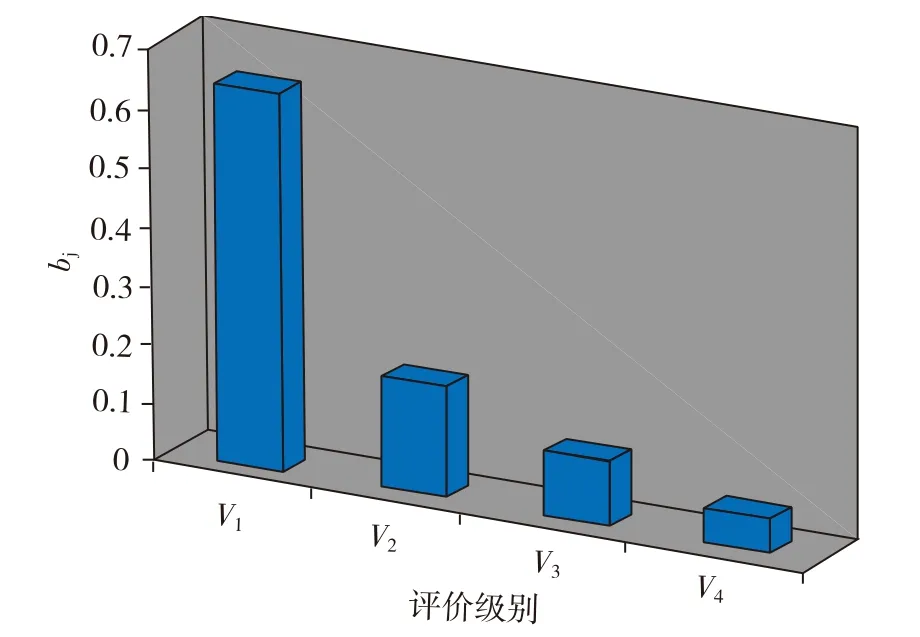
图2 802工作面智能化无人开采适用性隶属度指数评价Fig.2 Evaluation chart of applicability membership index of intelligent unmanned mining in 802 working face
1号煤矿802工作面智能化无人开采工作面的适用性模糊综合评价结果为好。所以该模糊综合评价结果与陕西陕煤黄陵矿业有限公司1号煤矿802工作面现场( 图3 )智能化无人开采工作面的适用性结果相吻合。
4 结论与展望
( 1 ) 评价选取8个一级指标和29个二级指标,对802工作面智能化无人开采适用性进行评价,8个一级指标对应的影响因素为地质条件、巷道布置体系、开采参数、采煤工艺、装备配套、关键技术、保障体系和组织管理。

图3 802智能化无人开采工作面现场应用效果Fig.3 Field application effect of intelligent unmanned mining in 802 working face
( 2 ) 提出了智能化无人开采适用性的多层次模糊综合评价模型。多层次模糊综合评价法能够考虑多因素情况下智能化无人开采工作面适应性的问题,确定各种评判因素之间的权重,评价方法完善,评价结果准确科学。通过实例分析表明,该模型评判结果较为合理,接近智能化无人开采工作面适用性的实际情况,为评价智能化无人开采工作面适用性提供了一条新的途径。( 3 ) 在未来可将层次分析模糊综合评价法与智能化无人开采相结合,构建一套智能化评价系统,通过选取影响工作面的评价指标,自动计算出影响因素的权重值。还可利用灰色理论和神经网络等评价方法构建数据库,借助人工智能技术进行分析,得到更加准确的结果。
参考文献( References ):
[1] 王国法,庞义辉,任怀伟.煤矿智能化开采模式与技术路径[J].采矿与岩层控制工程学报,2020,2( 1 ):013501.WANG Guofa,PANG Yihui,REN Huaiwei.Intelligent coal mining pattern and technological path[J].Journal of Mining and Strata Control Engineering,2020,2( 1 ):013501.
[2] 任怀伟,王国法,赵国瑞,等.智慧煤矿信息逻辑模型及开采系统决策控制方法[J].煤炭学报,2019,44( 9 ):2923-2935.REN Huaiwei,WANG Guofa,ZHAO Guorui,et al.Smart coal mine logic model and decision control method of mining system[J].Journal of China Coal Society,2019,44( 9 ):2923-2935.
[3] 范京道,徐建军,张玉良,等.不同煤层地质条件下智能化无人综采技术[J].煤炭科学技术,2019,47( 3 ):48-57.FAN Jingdao,XU Jianjun,ZHANG Yuliang,et al.Intelligent unmanned fully-mechanized mining technology under conditions of different seams geology[J].Coal Science and Technology,2019,47( 3 ):48-57.
[4] 李首滨.煤炭智能化无人开采的现状与展望[J].中国煤炭,2019,45( 4 ):7-14.LI Shoubin.Present situation and prospect on intelligent unmanned mining at work face[J].China Coal,2019,45( 4 ):7-14.
[5] 王国法,范京道,徐亚军,等.煤炭智能化开采关键技术创新进展与展望[J].工矿自动化,2018,44( 2 ):5-12.WANG Guofa,FAN Jingdao,XU Yajun,et al.Innovation progress and prospect on key technologies of intelligent coal mining[J].Industry and Mine Automation,2018,44( 2 ):5-12.
[6] 黄曾华.可视远程干预无人化开采技术研究[J].煤炭科学技术,2016,44( 10 ):131-135,187.HUANG Zenghua.Study on unmanned mining technology with visualized remote interference[J].Coal Science and Technology,2016,44( 10 ):131-135,187.
[7] 王国法,杜毅博.智慧煤矿与智能化开采技术的发展方向[J].煤炭科学技术,2019,47( 1 ):1-10.WANG Guofa,DU Yibo.Development direction of intelligent coal mine and intelligent mining technology[J].Coal Science and Technology,2019,47( 1 ):1-10.
[8] 张科学.综掘工作面智能化开采技术研究[J].煤炭科学技术,2017,45( 7 ):106-111.ZHANG Kexue.Study on intelligent mining technology of fullymechanized heading face[J].Coal Science and Technology,2017,45( 7 ):106-111.
[9] 张科学,李首滨,何满潮,等.智能化无人开采系列关键技术之一——综采智能化工作面调斜控制技术研究[J].煤炭科学技术,2018,46( 1 ):139-149.ZHANG Kexue,LI Shoubin,HE Manchao,et al.Study on key technologies of intelligent unmanned coal mining seriesI :study on diagonal adjustment control technology of intelligent fully-mechanized coal mining face[J].Coal Science and Technology,2018,46( 1 ):139-149.
[10] 王国法,张德生.煤炭智能化综采技术创新实践与发展展望[J].中国矿业大学学报,2018,47( 3 ):459-467.WANG Guofa,ZHANG Desheng.Innovation practice and development prospect of intelligent fully mechanized technology for coal mining[J].Journal of China University of Mining & Technology,2018,47( 3 ):459-467.
[11] 范京道.煤矿智能化开采技术创新与发展[J].煤炭科学技术,2017,45( 9 ):65-71.FAN Jingdao.Innovation and development of intelligent mining technology in coal mine[J].Coal Science and Technology,2017,45( 9 ):65-71.
[12] 李宁,王李管,贾明涛.基于层次分析法的矿井六大系统模糊综合评价[J].中南大学学报( 自然科学版 ),2015,46( 2 ):631-637.LI Ning,WANG Liguan,JIA Mingtao.An analytic hierarchy process based fuzzy evaluation of underground mine six-system[J].Journal of Central South University ( Science and Technology ),2015,46( 2 ):631-637.
[13] 王旭,霍德利.模糊综合评价法在煤矿安全评价中的应用[J].中国矿业,2008( 5 ):75-78.WANG Xu,HUO Deli.Application of fuzzy comprehensive evaluation in coal safety assessment[J].China Mining Magazine,2008( 5 ):75-78.
[14] 张科学,柏建彪,郝云新,等.煤巷锚杆支护效果的多层次模糊综合评价[J].煤炭科学技术,2010,38( 8 ):10-14.ZHANG Kexue,BAI Jianbiao,HAO Yunxin,et al.Multi-level fuzzy comprehensive evaluation of bolt support effect of seam gateway[J].Coal Science and Technology,2010,38( 8 ):10-14.
[15] 易恩兵,牟宗龙,窦林名,等.冲击矿压危险性的模糊综合评价研究[J].煤炭工程,2011,43( 6 ):70-73.YI Enbing,MU Zonglong,DOU Linming,et al.Study on fuzzy comprehensive evaluation on mine pressure bumping dangers[J].Coal Engineering,2011,43( 6 ):70-73.
[16] 朱珍,张科学,何满潮,等.无煤柱无掘巷开采自成巷道围岩结构控制及工程应用[J].煤炭学报,2018,43( S1 ):58-66.ZHU Zhen,ZHANG Kexue,HE Manchao,et al.Surrounding rocks control technology and application of automatically formed roadway in mining without coal pillar and gateroad excavation[J].Journal of China Coal Society,2018,43( S1 ):58-66.
[17] 何满潮,宋振骐,王安,等.长壁开采切顶短壁梁理论及其110工法——第三次矿业科学技术变革[J].煤炭科技,2017( 1 ):1-9,13.HE Manchao,SONG Zhenqi,WANG An,et al.Theory of longwall mining by using roof cutting shortwall team and 110 method-the third mining science and technology reform[J].Coal Science & Technology Magazine,2017( 1 ):1-9,13.
[18] 王亚军,何满潮,张科学,等.切顶卸压无煤柱自成巷开采巷道矿压显现特征及其控制对策[J].采矿与安全工程学报,2018,35( 4 ):677-685.WANG Yajun,HE Manchao,ZHANG Kexue,et al.Strata behavior characteristics and control countermeasures for the gateroad surroundings in innovative non-pillar mining method with gateroad formed automatically[J].Joumal of Mining & Safety Engincering,2018,35( 4 ):677-685.
[19] 朱珍,张科学,袁红平.切顶卸压沿空留巷碎石巷帮控制技术及工程应用[J].煤炭科学技术,2018,46( 3 ):1-7.ZHU Zhen,ZHANG Kexue,YUAN Hongping.Control technology and its application of roadway side wall formed by gangue in gob-side entry retaining formed by roof cutting and pressure releasing[J].Coal Science and Technology,2018,46( 3 ):1-7.
[20] 朱珍,袁红平,张科学,等.基于切顶卸压无煤柱自成巷顶板下沉分析及控制技术[J].煤炭科学技术,2018,46( 11 ):1-7.ZHU Zhen,YUAN Hongping,ZHANG Kexue,et al.Analysis and control technology of roof subsidence in non-pillar gob-side entry retaining formed by roof cutting and pressure release[J].Coal Science and Technology,2018,46( 11 ):1-7.
[21] 黄乐亭,黄曾华,张科学.大采高综采智能化工作面开采关键技术研究[J].煤矿开采,2016,21( 1 ):1-6.HUANG Leting,HUANG Zenghua,ZHANG Kexue.Key technology of mining intelligent fully mechanized coal mining face with large mining height[J].Coal Mining Technology,2016,21( 1 ):1-6.
[22] 黄曾华,南柄飞,张科学,等.基于Ethernet/IP综采机器人一体化智能控制平台设计[J].煤炭科学技术,2017,45( 5 ):9-15.HUANG Zenghua,NAN Bingfei,ZHANG Kexue,et al.Design on intelligent control platform of mechanized mining robot based on Ethernet/IP[J].Coal Science and Technology,2017,45( 5 ):9-15.
[23] 王国法,赵国瑞,任怀伟.智慧煤矿与智能化开采关键核心技术分析[J].煤炭学报,2019,44( 1 ):41-48.WANG Guofa,ZHAO Guorui,REN Huaiwei.Analysis on key technologies of intelligent coal mine and intelligent mining[J].Journal of China Coal Society,2019,44( 1 ):41-48.
[24] 孙继平.煤矿信息化与智能化要求与关键技术[J].煤炭科学技术,2014,42( 9 ):22-25.SUN Jiping.Requirement and key technology on mine informationlization and intelligent technology[J].Coal Science and Technology,2014,42( 9 ):22-25.
猜你喜欢
公民与法治(2022年5期)2022-07-29
教学考试(高考物理)(2021年5期)2021-11-08
中医眼耳鼻喉杂志(2021年1期)2021-07-22
家庭影院技术(2021年2期)2021-03-29
建材发展导向(2019年10期)2019-08-24
小哥白尼(军事科学)(2019年2期)2019-04-17
淄博师专论丛(2019年1期)2019-04-04
小哥白尼·趣味科学画报(2019年12期)2019-02-28
岷峨诗稿(2017年4期)2017-04-20
新高考(英语进阶)(2017年12期)2017-02-26
