
智能导诊机器人的设计与实现*
2021-12-22 06:29袁方马瑞霞任海玲白云峰李彬郭学茹
数字技术与应用 2021年11期
袁方 马瑞霞 任海玲 白云峰 李彬 郭学茹
1.银川市第一人民医院;2.宁夏医科大学
针对现有智能导诊机器人存在的知识库不完善、功能单一无法在实际场景中发挥作用、智能问答系统在应答过程中还存在答非所问,应答场景有限;后台管理平台设计不合理、语音处理引擎效果不佳、人脸处理引擎不精准、工作地点固定、机器人外观形象设计不人性化等问题设计智能导诊机器人。(1)基于KANO模型确定智能导诊机器人的必备功能、魅力功能、期望功能、无差异功能;(2)搭建6大知识库,涵盖24000余条知识,通过4大引擎技术实现自动巡逻、医院信息查询、科室推荐、专家查询、科室导航、带路引导等14大功能;(3)提出了一种基于深度神经网络的智能问答系统设计与优化方法实现流畅的人机问答,将各项单点技术融会贯通;(4)完善机器人后台管理平台,实现实时监控机器人工作问答状态、增删改知识库、数据统计分析等功能;(5)基于环形6麦克风阵列实现远场高精度识别、基于多模态视觉技术实现场景人物全感知。本研究研发的智能导诊机器人基本能够实现自助分诊,提升患者满意度、减少医疗机构在导医工作中的人力资源投入。
0 引言
随着物联网、人工智能、大数据、区块链等信息科学技术的迅速发展,智慧医疗、智慧医院建设已成为提高医疗质量和患者满意度的重要手段[1]。医院导诊工作是患者进入医院享受的第一道服务,具有工作难度系数低、患者就医满意度影响系数大的特点[2]。然而信息科学技术对医院导诊工作的赋能作用不明显,传统医院导诊工作仍然在消耗大量的人力资源用于服务患者对科室导航、就医流程、专家咨询等问题的咨询回答上,存在机械性、重复性、低难度性[3]。本研究对银川市某三甲医院随机抽取2692名人员进行了问卷调查(导医436名、患者2256名),80%的导医表示会因为同时接待太多患者而不能给予很好的服务,见图1;95.08%的导医表示在导诊服务中,患者问询的问题是重复的,见图2;100%的导医表示在导诊服务中会遇见自己无法回答的问题,见图3;85.25%的导医表示希望有一款智能导诊机器人来辅助导诊工作,见图4。
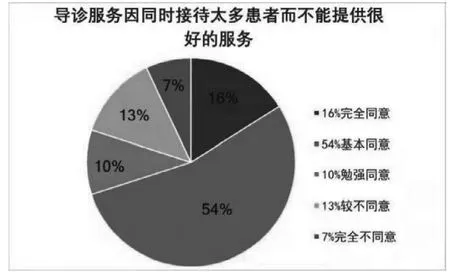
图1 服务情况Fig.1 Service situation
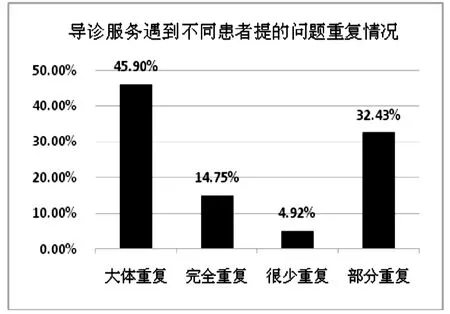
图2 问题重复情况Fig.2 Duplicate problem
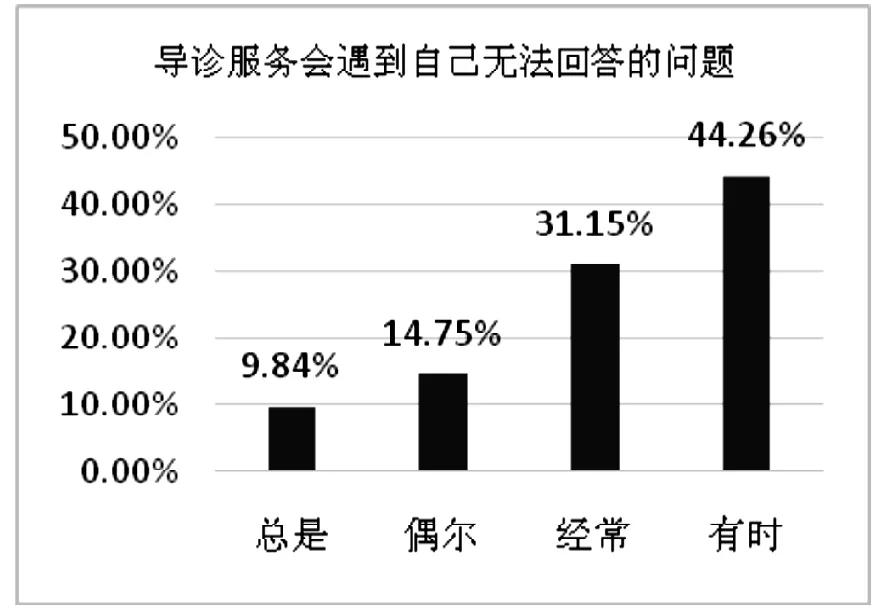
图3 会遇见自己无法回答的问题Fig.3 Will encounter questions I can't answer
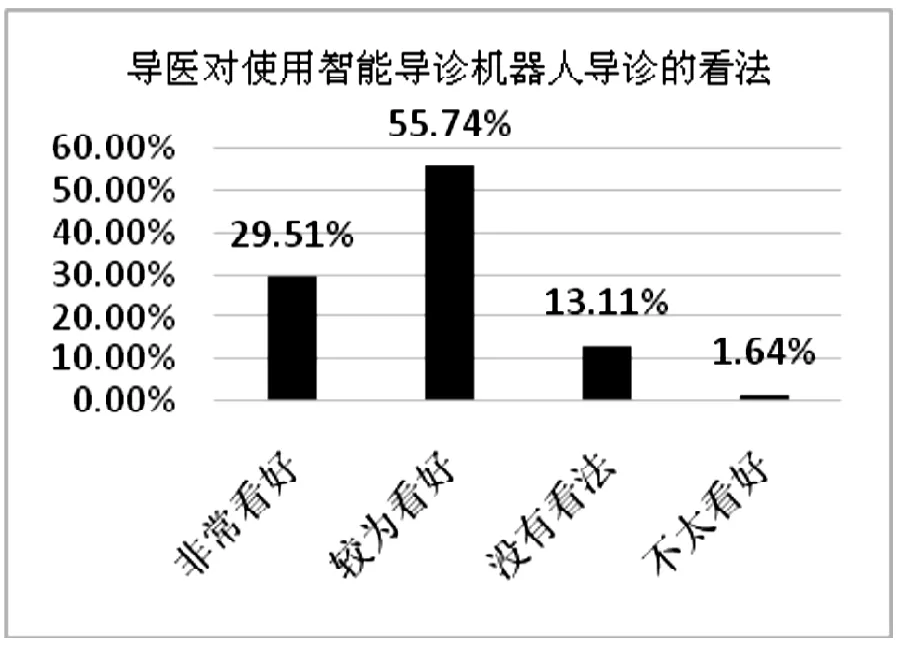
图4 对智能导诊机器人导诊的看法Fig.4 Views on intelligent guiding robot
近年来,智能导诊机器人、嵌入移动端的智能问答系统相继问世,但未能被医院及广大患者使用,主要原因包括:
(1)知识库不完善,不能覆盖患者所有的问题;(2)功能单一,不能满足患者需求[4];(3)基于知识库的智能问答系统大多都只能实现简单的功能,无法在现实场景中发挥作用,此外在应答过程中还存在答非所问、应答场景有限等缺陷;(4)机器人后台管理平台设计不合理,不具有对实时监控机器人工作问答状态、增删改知识库、数据统计分析等功能;(5)智能导诊机器人的语音处理引擎效果不佳,在门诊大厅嘈杂环境中不能高效准确识别患者的语音;(6)人脸处理引擎不精准,不能同时从多人中结合语音引擎处理锁定咨询患者;(7)工作地点固定,不容易被患者发现并体验,存在被动性;(8)机器人外观形象设计不人性化,导致患者体验度不好,例如高度、头部灵活度等;(9)嵌入移动端的智能问答系统,这类系统普遍嵌入移动端的微信公众号或小程序,患者需要打开程序,再进一步输入要咨询的问题,操作繁琐、不直接,用户体验感不好。
2015年银川市第一人民医院积极探索互联网+医疗健康,成立了“互联网+医疗健康研究中心”,基于该平台,针对以上问题,2015年银川市第一人民医院积极探索互联网+医疗健康,成立了“互联网+医疗健康研究中心”,本研究研发了智能导诊机器人,基本能够实现自助分诊,提升患者满意度、减少医疗机构在导医工作中的人力资源投入。
1 系统需求
基于KANO模型的智能导诊机器人功能属性分析,见表1。

表1 基于KANO模型的智能导诊机器人功能属性Tab.1 Functional attributes of intelligent guidance robot based on KANO model
基于KANO模型,对收取的2692份问卷调查(导医436名、患者2256名)结果进行了分析,收集患者及导医对智能导诊机器人的功能需求,其中必备属性4个,包括:“智能问答”“预约挂号”“院内地图导航”“隐私保护”;期望属性1个,为“体验反馈”;魅力属性3个,包括“最佳科室匹配”“就诊百科”“方言识别”;无差异属性1个,为“人脸识别”。按照功能/服务提供优先级,满足顺序为:必备属性>期望属性>魅力属性>无差异属性。因此,在智能导诊机器人的开发上,应优先满足智能问答、预约挂号、院内地图导航、隐私保护4大功能;其次,满足期望属性:体验反馈;再次,满足魅力属性,最佳科室匹配、就诊百科、方言识别3大功能;最后,本研究结合其他智能导诊机器人在应用过程中存在的问题,实现主动迎宾、娱乐聊天、交通查询、专家查询、健康宣教、科普视频天气查询等共计14大功能。基于KANO模型的智能导诊机器人功能属性分析见表1。Better-Worse系数图如图5所示。
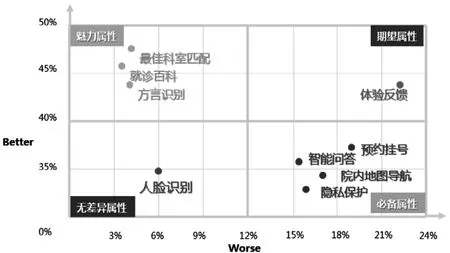
图5 Better-Worse系数图Fig.5 Better-Worse coefficient diagram
2 系统功能结构设计
2.1 系统架构
针对智能导诊机器人知识库不完善,不能覆盖患者所有的问题;功能单一,不能有效提供患者所需信息问题,搭建了6大知识库,并基于此6大知识库利用4大引擎技术,实现14大功能,全面覆盖患者就医可能涉及到的各种咨询问题。6大知识库具体包括医院信息知识库,涵盖知识1600余条;医院专家知识,涵盖知识200余条;医院导航知识库,涵盖知识386条;科普知识库,涵盖知识6000余余条视频知识及8000余余条文本知识;疾病诊断知识库包括6000余余条疾病科室知识库及6000余余条症状科室知识,其他知识库涵盖语料知识、天气情况、交通情况等知识。4的引擎技术包括语音处理、数据采集、人脸处理、知识处理。14大功能包括:医院信息查询、主动迎宾、科室推荐、娱乐聊天、交通查询、预约挂号、就诊流程、专家查询、科室导航、健康宣教、就医评价、科普视频、带路引导、天气查询等。具体系统架构如图6所示。
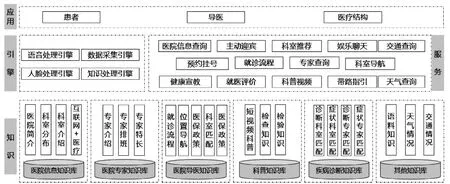
图6 智能导诊机器人系统架构图Fig.6 Architecture diagram of intelligent guidance robot system
2.2 智能问答系统
针对智能导诊机器人在应答过程中还存在答非所问,应答场景有限问题,基于深度神经网络设计优化智能问答系统。(1)预处理过程中,使用词袋模型结合Skip-gram模型生成最终的词向量;(2)优化词向量加权模块,摈弃仅根据词频决定词向量权重的传统方法,使用词频逆文档频率加权方法来提高关键词的权重,输出词语表达结果;(3)联合使用检索匹配模型和基于注意力机制的生成对话模型产生应答,不仅可以回答语料库中预定义的问题,还可以通过长短期记忆网络的训练和预测真正理解句子的含义,回答开放域的问题。智能问答系统框架如图7所示。训练阶段逻辑划分如图8所示。
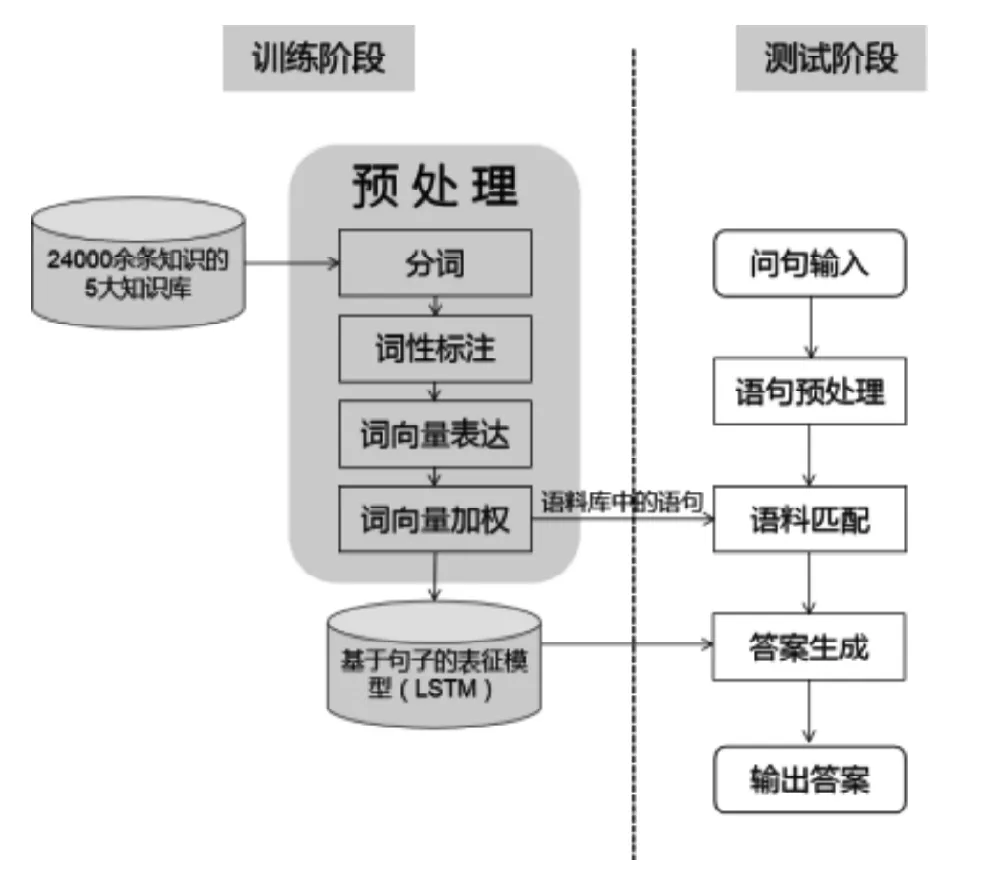
图7 智能问答系统框架Fig.7 Intelligent question answering system framework
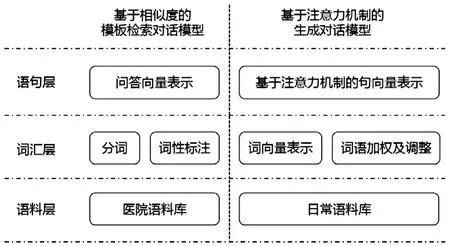
图8 训练阶段逻辑划分Fig.8 Logical division of training phase
2.3 后台管理平台
针对智能导诊机器人机器人后台管理平台设计不合理,不具有对实时监控机器人工作问答状态、增删改知识库、数据统计分析等功能,搭建覆盖后台管理、机器人、用户操作三大平台。后台管理平台可以实现:数据统计、知识库维护、实时监控、远程操控等功能;机器人平台可实现语音识别、人脸识别、传感器感知、定位导航等功能;用户操作平台可实现预约挂号、触屏操控、语音咨询等功能。机器人三大平台功能架构如图9所示。
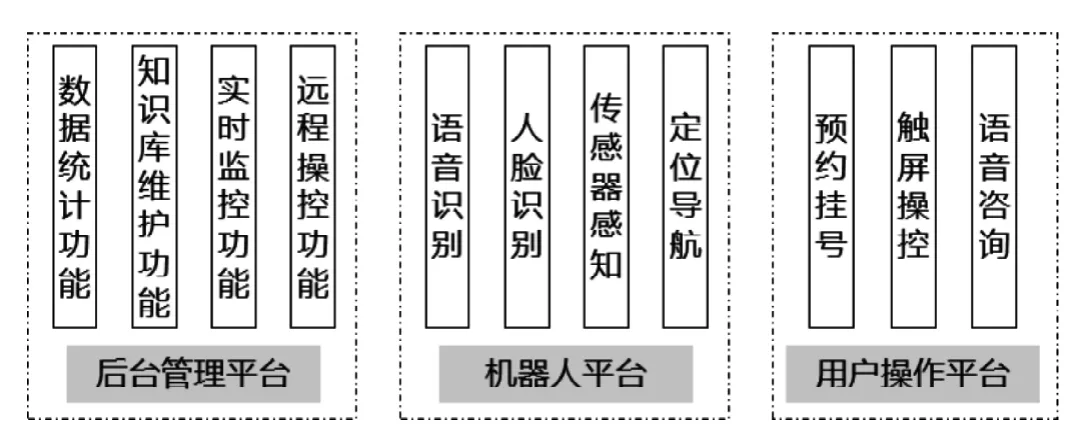
图9 机器人三大平台功能架构图Fig.9 Functional architecture diagram of the three robot platforms
2.4 环形6麦克风阵列
针对智能导诊机器人的语音处理引擎效果不佳,在门诊大厅嘈杂环境中不能高效准确识别患者的语音问题,基于环形6麦克风阵列,通过语音增强、声源定位技术、去混响技术、声源信号提取等技术,实现噪声抑制、回声抑制、去混响、单或多声源定位、声源数目估计、源分离等功能,支持360°范围拾音,±10°声源定位,5m远场交互识别率92%,唤醒率95%。环形6麦克风阵列如图10所示,语音交互流程如图11所示。

图10 环形6麦克风阵列Fig.10 Ring 6 microphone array
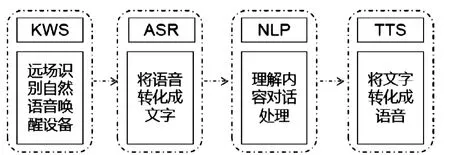
图11 语音交互步骤Fig.11 Voice interaction steps
2.5 基于多模态视觉技术的场景人物全感知
针对人脸处理引擎不精准,不能同时从多人中结合语音引擎处理锁定咨询患者问题,本研究基于多模态视觉技术实现场景人物全感知、实现人脸跟随、性别年龄分析、手势识别、物体识别定位等以实现场景人物全感知。全感知视觉识别如图12所示。
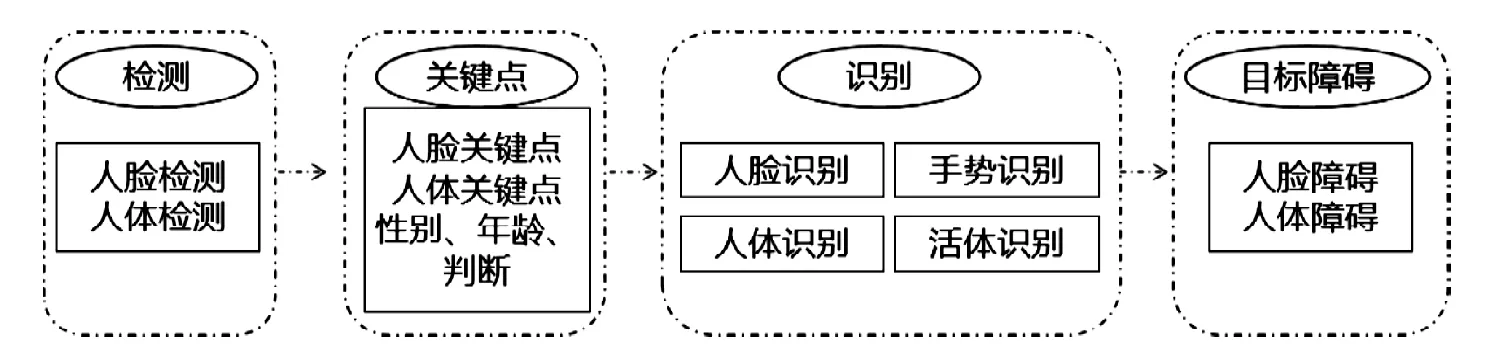
图12 全感知视觉识别Fig.12 Full perception visual recognition
2.6 视觉和激光雷达结合的多传感器融合导航技术
针对智能导诊机器人工作地点固定,不容易被患者发现并体验,存在被动性的缺点,基于结合视觉和激光雷达的多传感器融合导航技术,融合激光雷达可以获得极高的角度、距离和速度分辨率、抗干扰的能力强、适于工作在日益复杂和激烈的信息战环境中及视觉导航系统速度快、信息量大、功能多的优势,实现智能避障碍、精准定位、自主巡逻、带路指引、地图构建等功能。
3 系统实现
3.1 访问流程
系统基于6大知识库20000余条导诊相关数据问答对、4大引擎技术、为患者提供14大功能,基于深度神经网络设计优化智能问答系统,利用环形6麦克风阵列、视觉和激光雷达结合的多传感器融合导航技术,实现感知获取,为患者提供及时高效智能的导诊服务。人机交互界面如图13所示。

图13 机器人工作流程图Fig.13 Robot work flow chart
3.2 系统界面
智能导诊机器人系统界面如图14所示。

图14 人机交互(a)Fig.14 Human-computer interaction (a)

图14 人机交互(b)Fig.14 Human-computer interaction (b)
4 讨论
本研究针对现有智能导诊机器人存在的问题,基于KANO模型确定了智能导诊机器人的必备功能、魅力功能、期望功能、无差异功能;搭建6了大知识库,涵盖24000余条导诊数据问答对,通过4大引擎技术实现了14大功能;基于深度神经网络实现了智能问答系统的设计与优化;完善了机器人后台管理平台,基于环形6麦克风阵列实现远场高精度识别、基于多模态视觉技术实现场景人物全感知。本研究研发的智能导诊机器人基本能够实现自助分诊,提升患者满意度、减少医疗机构在导医工作中的人力资源投入。
猜你喜欢
作文周刊·小学二年级版(2019年20期)2019-07-03
制造技术与机床(2019年6期)2019-06-25
中国交通信息化(2016年9期)2016-06-06
图书馆研究(2015年5期)2015-12-07
中国卫生(2015年2期)2015-11-12
河南电力(2015年5期)2015-06-08
皖西学院学报(2015年5期)2015-02-28
中国卫生质量管理(2014年5期)2014-02-28
中国药物经济学(2013年7期)2013-07-01
读写算·高年级(2009年3期)2009-11-16
