
基于半实物仿真的水面无人艇测试系统构建方法
2022-03-24 01:22胥凤驰谢杨柳董洁琳宋胜男骆福宇
无人系统技术 2022年1期
胥凤驰,谢杨柳,董洁琳,宋胜男,骆福宇
(中国船舶工业系统工程研究院,北京 100094)
1 引言
水面无人艇是一种具有自主航行与路径规划能力,可搭载不同的任务载荷,并且能够完成设定任务的小型水面舰艇。它具有体积小、航速高、智能化、无人员操控等优点,被广泛应用于海洋空间资源探测、海底测绘、应急救援、情报收集、反潜反水雷等领域。通常,水面无人艇具备在自主控制状态下完成复杂环境下环境感知及自主避碰、复杂海况下精准跟踪以及航行任务一体化控制能力[1];具备对海域环境的实时探测、感知和重构能力,对水面目标完成感知、定位和识别,对水下目标完成感知、定位,以及能够对本艇平台搭载的传感器信息及来自外部的环境信息进行态势融合,建立任务区域环境态势[2],并能将环境态势信息经通信链路回传至控制端;具备在复杂海洋环境下自主航行及避障能力,具备任务规划执行能力及航行任务自主控制能力,具备载荷设备模块化换装的能力,应能够根据任务背景搭载不同载荷,完成水面警戒巡逻任务、水下目标探测任务、水面目标跟踪监视任务等多种作战任务[3]。另外,针对不同的使命任务,水面无人艇要基于各种基础应用算法制定相应的任务策略,满足任务需求。策略主要包括航行控制、任务执行两大类。航行控制策略保证无人艇在作战任务下的航行控制,任务执行策略保证无人艇能够完成各种作战任务。任务策略由各种基础应用算法组合而成,并具有灵活的可扩展能力。水面无人艇支持高速航行、典型航迹跟踪及避障、水面多目标感知及规避、水下目标感知和水面运动目标跟踪监视等作战任务。
为了验证无人艇的基础功能、平台综合性能及各项技术指标是否满足上述技术要求,完成对无人艇平台性能、自主航行控制能力、通信和载荷的可靠性,以及对突发情况的紧急处置等相关测试,设计相关验证试验。国外已有无人机的仿真模拟测试系统,能够对飞行控制进行简单测试,但是对于任务功能的测试还达不到时间和精度方面的要求。目前,在实验室条件下对水面无人艇航行任务系统的测试只能测试一部分与航行状态无关系的简单任务功能测试,而对于较复杂的航行控制与任务功能测试则需要采用外场测试的方法,由于水面无人艇工作环境的复杂性和海上环境的不确定性,导致系统测试需要消耗很高的时间和成本,为水面无人艇的系统测试增加难度。另外,通过模拟不同传感器返回目标报文的方式能够实现对任务功能的测试,但是往往同一目标的不同传感器的目标报文格式相差很大,报文构建过程复杂,涉及水面、水下以及广泛海域不同海况下的任务功能测试,生成报文的人工工作量较大。由于不同传感器模拟生成的目标报文之间互不联系,无法结合传感器本身的特性实现传感器信号的模拟,也无法模拟目标在特定海洋环境下的运动状态,导致模拟测试效果与实艇测试相差较大,无法通过仿真测试达到验证实艇任务功能的目的。以上所有的方法均无法灵活、全面地对水面无人艇航行任务系统的功能和性能进行测试[4]。
本文设计了一种基于半实物仿真的水面无人艇测试系统构建方法,该测试系统利用无人艇的组成设备模拟器和实物共同搭建水面无人艇系统测试环境,不仅能够在实验室条件下对航行任务系统的功能和性能进行全面测试,而且可以对实际航行任务中多种复杂条件下的水面无人艇的自主能力进行充分考量,通过对测试数据的分析统计,提早发现潜在的系统缺陷,提高系统的安全性和可靠性。半实物仿真测试系统适用于包含无人机、无人车、无人艇在内的多种无人装备的系统测试[5]。
2 基于半实物仿真的水面无人艇测试系统组成
测试系统基于由岸基航行任务指挥控制台、艇上信息处理设备组成的航行任务系统,利用无人艇综合导航模拟器、任务载荷模拟器,结合可靠性、安全防护性能测试等配试工具,搭建实验室条件下的测试用例运行环境,开发测试用例生成工具、测试用例分类存储工具、测试用例抽取工具、测试环境配置工具以及测试数据分析、评估等工具,完成测试系统的搭建。
该测试系统可以灵活、快捷地建立适合各种场合、各种环境的无人艇系统测试,能够有效地为无人艇系统提供功能测试、可靠性测试、安全防护性能测试等,并能够提供功能有效性、系统可靠性和无人自主性等的测试评价。该测试系统有良好的扩展性,根据模拟器的不同,可支持对无人艇单艇及无人艇协同的测试。采用开放的技术框架,以保证测试系统可与其他系统或设备进行功能集成和设备集成。基于半实物仿真的水面无人艇测试系统组成图如图1所示。
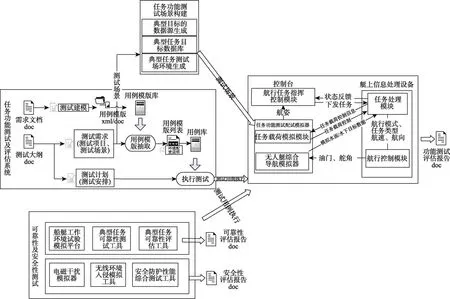
图1 基于半实物仿真的水面无人艇测试系统组成图Fig.1 Composition diagram of unmanned surface vehicle test system based on hardware-in-the-loop simulation
2.1 任务功能测试及评估系统
任务功能测试及评估系统由任务试验方案生成模拟软件、典型任务试验评估软件、运行状态监控软件、安全防护设计测试及评估服务器和任务功能测试支撑服务器组成。任务功能测试及评估系统用于根据无人艇的不同任务类型,形成典型任务试验方案,配置生成测试环境,能够用于无人艇试验方案的筹划,支持试验方案、测试需求、测试用例和测试计划生成,支持测试用例脚本和自动执行和测试数据自动收集存储。在测试完成后给出评估结果,并能够在试验过程中实时监控软硬件工作状态。
2.2 任务功能测试配试模拟器
任务功能测试配试模拟器主要包括:无人艇综合导航模拟器和任务载荷模拟模块。
2.2.1 无人艇综合导航模拟器
由于无人艇在海上执行任务过程中,受到复杂海洋环境的影响,不可避免地产生振动运动[6]。因此,模拟无人艇航行状态,对于保障无人艇安全航行,提高船舶任务工作能力等有着重要意义。针对水面无人艇系统测试需求,设计和实现水面无人艇综合导航模拟器软件,模拟器是用来实现在实验室条件下对无人艇系统进行测试的重要配试设备。无人艇综合导航模拟器能够模拟不同海洋及气候条件下的无人艇定位、航向、航速、纵横摇和AIS 等信息,为无人艇系统测试提供综合导航信息。
综合导航模拟器的工作流程如下:
(1)根据测试需求,在任务功能测试场景构建工具中设置测试场景,制定无人艇的初始位置、试验场景海洋环境等信息,为无人艇综合导航模拟器提供外部环境输入;
(2)将任务下发给艇上综合信息处理设备,艇上综合信息处理设备的任务处理模块接收任务规划,并将任务规划中的速度、航向转换为油门、舵角等信息输入到无人艇综合导航模拟器中;
综合导航模拟器利用动力学原理计算速度、航向,并结合试验场景中提供的海洋及气候条件,更新无人艇的定位、航向、航速、纵横摇等信息[7],按照通信协议要求发送给航行控制模块,从而模拟无人艇航行的效果,实现对航迹跟踪、路径规划、避障和目标探测等任务的测试。
综合导航模拟器支持同时运行多个可执行程序,利用试验导调台设置无人艇集群测试场景及多个无人艇的初始位置,实现多艇集群协同任务测试。
2.2.2 任务载荷模拟模块
针对水面无人艇系统测试需求,设计和实现水面无人艇任务载荷模拟模块软件,为无人艇系统测试环境搭建提供配试设备保障。任务载荷模拟器是用来实现在实验室条件下对无人艇系统进行测试的重要配试设备,包括导航雷达模拟器、声呐模拟器和光电模拟器等。无人艇任务载荷模拟模块能够模拟无人艇上配置的探测设备,能够根据综合导航或对应模拟器的信息、接收来自任务功能测试场景构建工具提供的测试场景设置及不同海洋气候条件,能够支持不同海洋及气候条件的运动目标轨迹的模拟[8],向艇上综合信息处理设备提供对应条件下的小目标数据,包括目标批数、批号、距离、方位、相对航向、相对航速、绝对航向、绝对航速和航迹形成时刻等。
无人艇任务载荷模拟模块的工作流程如下:
(1)根据测试需求,在任务功能测试场景构建工具中设置测试场景,制定试验场景海洋环境信息、设定目标类型、目标运动轨迹和目标出现时刻等,为任务载荷模拟模块提供外部环境输入;
(2)无人艇任务载荷模拟模块根据测试场景设置和通信接口协议,生成对应的水面及水下目标数据,并根据任务载荷模拟模块参数设置,将模拟目标数据发给任务处理模块,从而验证无人艇任务处理模块对目标的处理功能。
2.3 任务功能测试场景构建工具
结合实艇测试经验,由于实际情况下传感器就是从环境中读取相关内容,完成感知。所以在仿真测试下,需要构建一个仿真的测试场景,这个测试场景无限接近实际环境,分析多种任务下测试环境的构成后,抽象出海洋环境和场景中的目标,通过将海洋环境和场景中的目标元素进行封装[9],提高多任务配置效率,再根据结合设置的海洋环境数据,生成目标数据及轨迹,完成仿真测试场景的构建。这个测试场景接近真实环境,解决了仿真测试与实艇测试差距大的问题。将测试场景提供给多传感器模拟器作为输入,各自读取场景中的数据并输出目标报文,能够简单有效地解决多模拟器互不连通带来的效果差的问题,因此提出任务功能测试场景构建工具。
任务功能测试场景构建能够对测试场景的数据进行管理,包括测试场环境数据管理,可产生不同场景下的典型任务测试场;目标数据管理构建典型任务目标数据库,存储和管理海上目标、水下目标和水面障碍物等目标数据;目标数据源生成,基于典型任务目标数据库生成典型目标,可模拟动目标的运行轨迹。另外,任务功能测试场景构建能够对测试场景进行配置,根据测试需求中的测试场景要求配置典型任务试验的测试方案,包括典型任务目标模拟和典型任务测试场环境模拟等,对典型任务试验的测试场景进行规划、设置、导调和监控等,构建满足典型任务试验需求的测试环境。主要对海上目标、水下目标、海洋环境条件等进行配置,以支持训练警戒、侦察监视和水下小目标探测等典型任务的场景配置。任务功能测试场景构建工具功能分解图如图2所示。任务功能测试场景构建数据处理流程如图3所示。
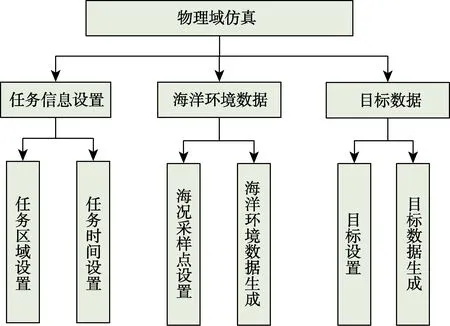
图2 任务功能测试场景构建工具功能分解图Fig.2 Functional decomposition diagram of task functional test scenario building tool
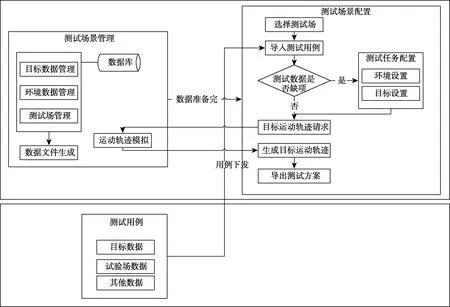
图3 任务功能测试场景构建数据处理流程Fig.3 Task function test scenario builds data processing flow
2.3.1 海上目标配置
根据巡逻警戒、侦察监视典型任务的测试场景需求,配置海上目标的种类、数量和运动轨迹等情况,配置的目标种类主要有水面快艇、渔船和大型舰船等。目标运动轨迹显示界面如图4所示。

图4 目标运动轨迹显示界面Fig.4 Target trajectory display interface
2.3.2 水下目标配置
根据水下小目标探测典型任务的测试场景需求,配置水下目标的种类、数量、运动轨迹等情况,配置的目标种类主要有锚雷、沉地雷、蛙人和潜航器等。
2.3.3 海洋环境条件配置
根据巡逻警戒、侦察监视、水下小目标探测典型任务的测试场景需求,配置典型任务的测试场水域大小、海况等级、季节和昼夜等情况。海洋气象环境设置界面如图5所示。

图5 海洋气象环境设置界面Fig.5 Marine meteorological environment settings interface
2.4 典型任务驱动的可靠性测试
由于水面无人艇需要长期自主执行任务,并且需要完成一些复杂的海上任务,就要求水面无人艇具备较高的可靠性[10]。通过分析巡逻警戒、侦察监视和水下小目标探测等典型任务条件的任务剖面,基于船艇工作环境模拟平台提供的温度、湿度和摇摆环境,与接入的艇上信息处理设备进行交互,典型海上任务能力驱动的可靠性测试设备能够将生成的可靠性测试用例输入艇上信息处理设备执行测试,并记录工作时长、故障类型、故障次数等可靠性模拟试验数据,为艇上信息处理设备可靠性评估提供基础。支持艇上信息处理设备连通和及时可靠性定量分析,同时对设计和实验中的发生故障信息进行定性分析,输出可靠度预计结果、设计改进措施和设计准则;能够在任务软件运行条件下,生成艇上信息处理设备可靠性试验测试用例,对艇上信息处理设备进行可靠性测试,并收集设备故障信息;能够对故障信息进行分析处理,融合多源产品故障信息对产品的可靠性进行评估。
典型可靠性测试工具根据任务软件可靠性测试用例生成与执行软件工具中记录的内外场试验中发生的故障数据进行故障定性分析,确定设计准则、改进和使用补偿措施;典型可靠性评估工具根据任务软件可靠性测试用例生成与执行软件工具中判定的试验故障信息进行系统和设备的可靠性评估。
2.5 安全防护攻击与监测
水面无人艇采用无线通信的方式与岸基指挥控制中心交换信息,因此对信息安全性要求较高[11]。安全防护综合测试工具应包含攻击测试模块和监测分析模块。攻击测试模块负责实现对公共服务基础架构的攻击测试用例构建、模拟攻击测试发起、测试结果反馈呈现。监测分析模块通过收集公共服务基础架构中的网络防护交换板信息,来实现对公共服务基础架构的安全态势进行建模分析,给出安全状况报告和攻击威胁告警。利用电磁干扰模拟器,模拟艇上信息处理设备的外部输入,向艇上信息处理设备植入病毒,以发现艇上信息处理设备存在的安全隐患,验证外部协议与接口的安全性;利用无线环境入侵模拟工具发起网络攻击,模拟无数据库访问权限的设备访问数据库,以发现非法侵入的隐患,验证数据库的安全性;通过下发远程数据销毁指令,下发规划航迹并模拟反馈无人艇航迹等;分析无人艇安全防护架构设计工具监控到的数据,检查艇上信息处理设备的病毒检测、数据加密、网络攻击提示、远程数据销毁和数据访问权限管理等能力。
安全防护性能综合测试工具采用事件触发模型[12],通过用户事件驱动攻击脚本及攻击工具进行攻击模拟,并监测艇上信息处理设备中的网络防护交换板的日志,从而得到攻击防护效果并反馈用户。安全防护性能综合测试工具包含两个模块:攻击测试模块和监控评估模块;用户的一次事件会触发安全防护性能综合测试工具进行两个动作:一是攻击测试模块运行攻击脚本进行攻击模拟操作;二是监控评估模块收集艇上信息处理设备中的网络防护交换板的日志信息进行攻击效果比对,并输出。
3 基于半实物仿真的水面无人艇测试实例
为了验证半实物仿真的水面无人艇测试系统的时效性和准确性,我们设计了水面多目标规避能力测试试验。
3.1 试验目的
考核被试艇水面静态障碍探测和定位能力及规避能力。
3.2 试验方法
在海面上设置由4 个边界点F01~F04 围成的3000 m×2000 m 矩形区域,并设置水面浮标测试时被作为水面障碍,并在矩形区域中心位置设置过航点T01,如图6所示,水面静态障碍具有不同的颜色辨识,红色颜色标识的水面障碍威胁半径R1 为200 m,蓝色颜色标识的水面障碍威胁半径R2 为150 m,绿色颜色标识的水面障碍威胁半径R3 为100 m,设置矩形进场区域A、出场区域B。
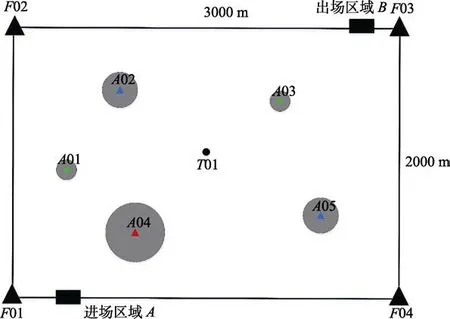
图6 水面多目标规避能力测试航路规划图Fig.6 Route planning of surface multi-target evasion capability test
接到开始命令后,切换自主航行模式,对水面静态障碍进行探测和定位,期间需经过指定过航点T01,探测完成后到达出场区域B,试验结束。试验过程中,检查各项设备是否处于正常工作状态,测量环境是否满足试验要求。
3.3 考核要求
(1)被试艇操作员按上述步骤要求操控被试艇;
(2)试验过程中,被试艇不得驶出F01~F04坐标点所围成的矩形区域,试验过程中不得进入各水面静态障碍的威胁半径范围内;
(3)被试艇在试验航行过程中,必须经过指定过航点T01;
(4)被试艇需在45 min 以内完成探测和定位,并到达出场区域B;
(5)针对障碍物的颜色及位置识别,被试艇的岸基处理设备应具备输出识别结果的专用显示区域。
针对试验题目要求,在仿真测试场景中和海上设置相同的测试区域及障碍物,分别采用仿真测试和实艇验证的方式进行测试,记录任务完成总时间及过必过点时间用来验证仿真测试系统的时效性,记录绕障碍物的距离以及过必过点的精度,验证仿真测试系统的准确性。时间和精度的对比见表1、表2。
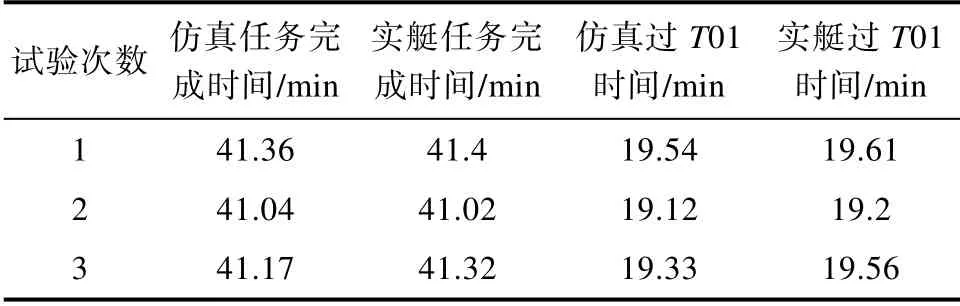
表1 时间对比Table 1 Time comparison
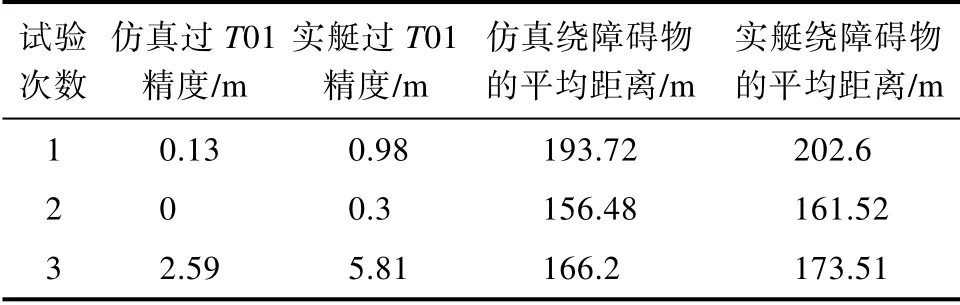
表2 精度对比Table 2 Accuracy comparison
从时间和精度上来看,仿真较实艇的用时更短一些,并且精度更好。考虑是由于实艇转弯机动造成的,未来将通过改善仿真系统的水动力模型,以提高综合导航模拟器的仿真精度以及时间和精度的准确性。
4 结语
本文在实验室条件下,利用无人艇综合导航模拟器、任务载荷模拟器,结合可靠性、安全防护性能测试等配试工具,搭建半实物无人艇仿真测试环境,把实艇测试项目提前至陆上系统测试中,可以对航行控制、任务处理流程和算法进行充分测试。另外,设计多种航行任务控制软件测试用例,利用场景构建工具模拟多种海上复杂环境下的水面/水下目标数据及海洋环境,可以提高算法的鲁棒性,减少在实际应用中的问题。通过对艇上重要任务载荷的模拟,可以验证整个任务执行流程的正确性,提高系统测试效率。
猜你喜欢
汽车实用技术(2022年9期)2022-05-20
汽车实用技术(2022年5期)2022-04-02
小哥白尼(趣味科学)(2021年6期)2021-11-02
疯狂英语·新读写(2021年6期)2021-08-05
故事作文·高年级(2021年4期)2021-05-06
小哥白尼(神奇星球)(2021年11期)2021-03-08
儿童故事画报(2020年7期)2020-08-03
小学科学(2020年6期)2020-06-22
创新作文(1-2年级)(2017年7期)2017-12-26
