
变负载下机器人液压串联弹性执行器动态位置控制方法
2022-04-02 02:41曹学鹏鲁航朱文锋钱亚伟田富元
西安交通大学学报 2022年4期
随着机器人技术的不断发展,机器人在工业、探索、救援等复杂作业环境中展现出巨大的应用需求
。BigDog等液压驱动足式机器人具有高负载、良好动态性能和较强环境适应性等优点,已经成为当前机器人研究的热点
。足式机器人与环境交互作用时,考虑到足式机器人和环境参数间作用的不确定性,设计时需采用串联弹性执行器(series elastic actuator,SEA)提高机器人接触作业的柔性和可控性
。
与传统的执行器相比,串联弹性执行器具有控制精度高,输出阻抗低和动态范围大等优点
。按驱动形式不同,SEA可分为电驱动SEA和液压SEA。电驱动SEA功率和质量较小,速度较快,适用于轻型机器人,如已用于外骨骼机器人
、腿足式机器人
及假肢机器人
。液压SEA具有更大的功率和质量,但移动速度较慢,在重载机器人方面具有明显的优势,适用于重型足式机器人。
各指标权重值α、β、λ:由于本文与文献[15]亚欧大陆桥竞争力比较分析具有同质性,故运输成本、运输时间和服务水平各指标的相对权重通过相关专业人员分别对每个指标的相对重要性进行定性描述,确定两两比较判断矩阵的方法得到α、β、λ分别取值0.467、0.163、0.37.同样对等级服务水平m=1,2,3分别赋值为0.3、0.6、0.9.年利率γ按目前贷款基准利率取值为4.35%.
机器人常用的柔顺控制方法有被动柔顺控制、主动柔顺控制和主/被动相结合控制3类。刘晓敏等利用气压传动固有的柔性特性设计了气动仿生柔性关节,实现了仿生关节的柔顺控制
,但这种被动柔顺控制具有一定的滞后性,存在明显的振荡与冲击。Uzunovic等提出了一种同时控制位置和相互作用力的新算法
,将位置和力控制合并为一个控制器,该主动柔顺控制在位置和力控制之间平稳过渡,但难以计算。Solanes采用滑模思想并采用任务优先级方法对表面抛光的机器人的混合位置力控制
,但不适应抖动工况。柯贤锋等为了减小足式机器人接触地面时的冲击,以弹簧作为被动柔顺控制元件,采用控制器进行主动柔顺控制,提高了足式机器人的环境适应能力
,但该方法降低了位置控制精度。
上述研究中,针对SEA的柔顺控制主要集中在轻量级功率输出方面,本文结合已有的研究成果,开展重载机器人用液压执行器在非结构环境中的应用研究。在液压SEA中,当执行器的活塞移动时,因液压油的可压缩性,使其液压刚度发生变化。此外,负载工况切换引起液压SEA动态特性的改变,影响SEA作为腿部执行器的运动性能,进而限制重载机器人的移动平稳性。为此本文着重于SEA在重载机器人中的控制方法和性能分析,分析采用ITAE(integrated time and absolute error)控制器时液压SEA在变负载工况下的动态位置控制性能。
1 液压SEA建模
足式机器人末端运动是由各个关节的组合运动叠加而成,机器人关节耦合可能导致关节角运动不到位,是影响机器人末端运动精度的因素之一。不少学者已就关节耦合对末端影响进行了较为充分的研究,并取得重要进展,包括从机器人运动学、动力学出发分析耦合运动的影响
和采用关节补偿策略减少耦合影响
。环境工况及与末端间的相互作用是影响机器人末端运动的另一重要因素,如环境刚度、阻尼等因素会影响末端执行器的控制性能。本文侧重于分析接触环境变化时重载SEA的动态位置控制方法与性能。
重载足式机器人的负载性能由腿部结构决定,当腿部末端与作业环境接触时,采用液压驱动的执行器,因油液压缩性很小,导致很小的活塞位移产生很大的驱动力变化,易引起与环境接触的腿部过载,甚至引起损坏,影响机器人的作业性能。此外,机器人行走于雪地、沙地等变化环境时,由于复杂的载荷条件,其足端所受环境负载特性不同,进一步增加了控制难度。为此,采用液压串联弹性执行器的结构提高机器人的柔顺性能,其作为机器人单支腿的等效模型如图1所示。为改善执行器自身柔性,考虑到其负载质量
、环境刚度
和负载阻尼系数
的影响,在此分析引入串联弹簧刚度
后负载输出端对其动态位置控制性能影响及其控制特性。以重载足式机器人单液压SEA为对象,暂不考虑多执行器间运动耦合及结构的弹性变形,建立与环境相互作用时的状态空间动态模型。

电液伺服阀的传递函数可视为二阶振荡环节,为此阀芯位移与输入信号之间的传递函数简化为

(1)
式中:
为阀芯位移,m;
为伺服放大板输入电流,A;
为电液伺服阀流量增益,m
/(s·A);
为电液伺服阀阻尼比;
为电液伺服阀固有频率,rad/s;
为复变量。
对流经阀口的流量进行线性化处理,可得
=
-
(2)
式中:
为流经阀口的流量,m
/s;
为负载压力差,
=
-
,
、
是前进和后退的压力,Pa;
为阀的流量压力系数,m
/(Pa·s)。
考虑流量连续性,即流进缸腔室的流量等于流经阀口的流量
=
(3)
式中:
为负载流量,
=(
+
)
2,
、
是前进和后退的流量,m
/s。
根据缸流量连续性方程和动态流量变化,负载流量可表示为

(4)
式中:
、
分别为活塞位移和负载位移,m;
为液压缸活塞腔有效面积,m
;
为活塞的总泄漏系数,
=
+
2,
、
分别是活塞的内部泄漏系数和外部泄漏系数,m
/(Pa·s),视泄漏系数为定值;
为两个腔室受压流体的总体积,m
;
为液压油的有效体积弹性模量,MPa。电液伺服阀相关参数值如表1所示。

输出活塞和负载组成的两自由度系统,动力学方程写为

(5)

(6)
式中:
为活塞质量,kg;
为活塞的黏性阻尼系数,N·m/s;
为施加在执行器上的任意负载力,N。液压SEA相关参数值如表2所示。


该液压串联弹性执行器的组成及计算模型如图2所示。综合式(2)~(4),可得

(7)
式中
为总流量-压力系数,
=
+
。
在此,选择状态向量为


(8)
运用状态空间法,式(5)~(7)可以表示为

(9)
系统性能主要由控制增益矢量
决定,状态变量越重要,其误差分量应尽可能小,其增益应越大,并用其绝对值表示。在理论计算中,将弹簧刚度取
=
/10=4.95×10
N/m。由式(18)得
=
=155.36 rad/s,
=49.63 rad/s,并且由式(17)计算固有频率
=47.39 rad/s。代入式(20),得到ITAE多项式为
方程组(9)可以用矩阵形式表示,即
足舟骨坏死常继发平足、跟骨倾斜角变小、跟骨外翻等畸形。成人获得性平足是足踝外科的常见病,常以内侧纵弓塌陷和后足及踝关节内侧稳定结构失衡为特征[2]。其病因可以是多方面的,可由先天及后天因素所致。儿童足舟骨无菌性坏死为自限性疾病,急性期可用支具固定6周左右,然后用鞋垫,预后较好。而对成年患者,骨的生长发育已停止,舟骨变扁平、密度增加后,微循环障碍致骨的营养不良进行性加重,临床表现为足部疼痛进行性加重,甚至出现跛行,保守治疗效果往往不佳。疼痛早期可行足舟骨经皮减压术[3],晚期患者则需进行融合术。

(10)
=
+
(11)
式中:




(1)纯惯性负载工况。假设液压SEA在水平方向上运动,其负载为纯惯性负载
,如图5所示。设负载力为其重力,预期输出位移为
=
=0
5 m。
(1)纯惯性负载工况。在实际应用中,通常不存在
,而
非常小,矩阵
可变为

选择负载位移
作为输出
(
),不考虑外部负载力
,则可得液压SEA的状态空间模型

(12)
在纯惯性负载工况下,其中
=200 kg,SEA弹簧刚度
=4.95×10
N/m,预期负载位移
=0.5 m。对比采用ITAE控制器和GWO-PD控制器的阶跃响应负载位移变化曲线,如图6所示。其中ITAE控制时响应速度最快,在3.5 s达到稳态,稳态误差为0.12%;GWO-PD控制时响应速度较快,在4 s达到稳态,稳态误差为1.99%。仿真结果表明,ITAE控制器响应速度快12.5%,稳定误差小93%,具有更好的动态位置控制性能。

(13)

(14)
式中:
接着进行实际抓取工件的测试,设置传送带在不同速度下,本文提出的动态抓取算法的精准性和稳定性,综合考虑到机器人视觉检测、图像处理及工件尺寸的测量等环节存在的误差,选取时间容差ε1=50 ms,x方向位置容差ε2=4 mm,迭代误差ε3=1 ms,测试结果如表2所示。测试中Delta机器人最快抓取速率为110次/min,测试时间超过100 min,漏抓率小于2%,误抓率为0,表明本文提出的动态抓取算法具有极高的准确性与稳定性。



2 液压SEA控制器设计
2.1 弹簧刚度的选择
2
1
1 液压弹簧刚度
液压SEA的等效弹簧刚度由活塞和缸体间的液压弹簧和串联弹簧组成,如图3所示。
国外很多报纸和杂志都会有图书推荐栏目,其中口碑最好的当属《纽约时报》。它在每周日的报纸上都会有一个专栏叫做Book Review(书评专栏)。这个专栏在1896年创刊,以“公正无偏”著称于世。该栏目自1942年起推出的“畅销书排行榜”几乎成为业内风向标,这个排行榜一直延续至今,并且保持着一贯的影响力。在《纽约时报》书评专栏,我们可以看到美国畅销图书的最新动态以及它们的内容简介,更有读者的精彩书评。笔者查阅2011-2013年的《纽约时报书评》,它在每年年底会发布一份十佳图书排行榜。这些图书代表了美国国内图书的年度最高水准,可以作为我们采购图书的一个重要参考标准。

在图3中,液压弹簧
与弹簧
串联,为此等效弹簧刚度
可表示为
“这些企业大部分都是中小企业,他们具备一定的技术积淀,不简单依靠资本投资,我们清楚泸州的特点和优势,对泸州来说吸引隐形冠军比培育巨无霸企业、独角兽企业更具有现实意义。”刘春说。

(15)

(16)
2
1
2 影响液压弹簧刚度的因素
1.4 统计学方法 采用SPSS 22.0软件进行统计学分析,计数资料以例(百分率)表示,比较采用配对设计样本率χ2检验,以P<0.05为差异有统计学意义。
(1)液压油自身的压缩性。液压弹簧刚度是在液压缸两腔完全封闭的情况下因液体的压缩性而形成的等效弹簧的刚度,故油液自身的压缩性直接影响该弹簧刚度,进而影响系统固有频率。
(2)油缸的内外泄漏。因泄漏的存在,液压缸不可能完全封闭,但在文中分析动态性能时,伺服阀处于快速切换状态,在给定频率内泄漏来不及变化,故仍按液压弹簧效应考虑
。
相应的控制器为
因此,分析动态性能时,主要考虑液压弹簧刚度,并将泄漏量
视为定值,而结构弹性变形的影响不予考虑。
计算机软件按照日常的使用可以分为系统软件和应用软件两大类。所谓系统软件,就是指对计算机的日常维护、监控、管理等各类软件,包括操作系统、自检程序等。对于应用软件而言,主要是为了解决某种具体问题或者达到某种问题而设计或者开发的软件,比如办公软件、绘图软件、PS软件等,对其进行功能分析发现,软件主要是利用计算机本身的逻辑功能,合理组织计算机进行工作,从而实现利用计算机简化工作过程的目的,甚至能够代替我们的工作环境,在现实生活中有着十分重要的作用。计算机软件的分类具体如下。
汉英在音节方面各有特色。在英语中,大多为多音节单词,读音时多数是音素组成的音节,音节构成单词。而在普通话中,一个汉字就是一个音节,音节由多个开音节组成,闭音节只有以n,ang等结尾的少数几种。所以,有时我们习惯在辅音后加一个元音。如把 please[pli:z]念成[pəli:z]。另外,在英语中两个单词组成短语时,有时可以连读,如gat up读成[ɡet ʌp](英)[ɡɛt ʌp](美)。然而在汉语中每个音节都有特定含意,每个音节具有强烈的“自我保护意识”,对内团结一致,对外“抵御外敌”,所以除儿化音外一般不能连读。所以,教学时要帮助学生排除普通话的干扰,掌握英语中的连读技巧。
2
1
3 串联弹簧刚度的选择
SEA的等效固有频率可以表示为
(1)内审机构开展科研经费审计。内部审计机构是独立的,应独立于科研经费的监督,检查科研经费的使用全过程,并行使其审计职能。内审人员应就审计情况向本单位负责人进行定期汇报,及时发现问题并及时督促相关部门进行整改。内审机构人员应严格遵守审计制度,完善审计流程,控制审计风险。

(17)

(18)
式中:
为等效质量,kg;
为活塞和负载的总质量,kg。

2.2 基于ITAE标准的控制器设计
针对SEA的控制特点和性能要求,设计了基于时间-误差绝对值的积分控制器(ITAE)
,即对时间与偏差的绝对值乘积积分,同时考虑系统的快速响应性和稳定性,其定义为
目前藏羊加工副产品,如藏羊皮、藏羊血、藏羊肠等大多没有被有效利用,造成了严重的资源浪费,根据这些副产品的营养特性,青海省可以以此为原料进行以下产品的开发和生产:

(19)
式中:
为时间,s;
(
)为系统偏差。
设计的ITAE控制器组成结构如图4所示,图中
为期望位置,
为状态向量
的第一个变量。

对于五阶状态空间模型,已知基于ITAE控制器准则的阶跃输入下传递函数的最优模型为


(20)
令
(
)=0,则可获得期望的极点值。通过极点配置方法,可获得相应的状态反馈增益矢量
=[
,
,
,
,
]。设计的控制器结构为


(21)

取控制输入
=
,干扰输入
=
。
(
)=
+132
692
+1
122 9×10
+
5
853 6×10
+1
714 8×10
+2
390 2×10
羊肚菌是珍稀名贵食用菌,具有独特的风味、丰富的营养和重要的保健作用,特别是在益肠胃、助消化、防癌抗癌和补肾助阳、补脑提神及提高人体免疫力等方面有明显的功效,因而备受国内外高端消费市场的青睐。
令
(
)=0,可获得控制增益矢量
=[2
4×10
,-2
4×10
,2
26×10
,-2
51×10
,1
62×10
]。
(3)结构弹性变形。结构弹性变形会影响有效体积弹性模量
,但工作压力变化不大时,该弹性变形和腔室总体积
相比很小,故对液压弹簧刚度影响小。


1
62×10
(22)
3 动态控制性能分析
3.1 负载工况的设定
考虑实际负载工况和工作环境,上述模型又可分为纯惯性负载和纯惯性-复合负载切换工况。

(2)纯惯性-复合负载切换工况。假设液压SEA在水平方向上运动,初始阶段驱动的是纯惯性负载
,此阶段无负载力,当运动
=0
5 m施加弹性载荷
,如图5所示,考虑了两种工况,即纯惯性负载工况及切换至复合负载工况。开始时有效负载只是纯惯性负载,在切换点
=0
5 m处,施加弹性负载,预期负载输出力
=3 000 N,预期负载位移为
=
。在负载切换工况下采用ITAE控制器对SEA进行控制,并与基于灰狼优化算法的PD控制器
(GWO-PD)进行性能对比。
3.2 纯惯性负载下的性能分析
3
2
1 不同控制器下的性能分析
(2)纯惯性-复合负载切换工况。当包括惯性和环境接触力在内的有效载荷足够大,且弹性弹簧力施加在质量
上,即考虑输入
。则将式(11)、(12)以及系数矩阵变为

3
2
2 不同惯性负载下的性能分析
在纯惯性负载工况下,其中SEA弹簧刚度
=4.95×10
N/m,预期负载位移
=0.5 m。对比
分别为10 kg、50 kg和200 kg时采用ITAE控制的阶跃响应负载位移变化曲线,如图7所示。随着惯性负载的增加,系统响应速度减慢。稳态误差基本不变。仿真结果表明,随着惯性负载的增大,系统快速响应性略微变差,稳定性基本不变。表明采用ITAE控制器时,对大惯性负载具有良好的适应性。


3.3 负载切换工况下的性能分析
3
3
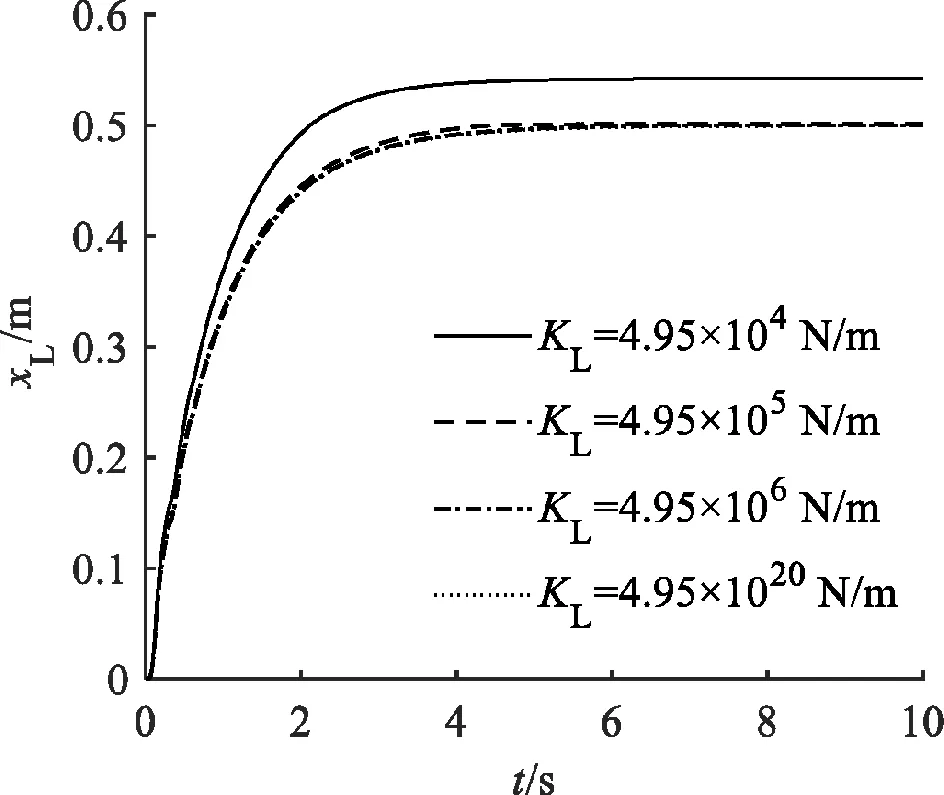
1 弹簧刚度变化

根据上述设定的切换工况,其中
=200 kg,环境刚度
=4.95×10
N/m,将表2中
、
、
等取值代入可计算得
=4.95×10
N/m,代入2
1节中确定的串联弹簧刚度范围,可得
∈[4.95×10
N/m,4.95×10
N/m],预期负载位移
=0.506 m。可获得不同串联弹簧刚度下采用两种控制器的阶跃响应负载位移变化曲线,如图8、9所示。采用GWO-PD控制器时,GWO优化算法优化后的值为
=0
000 2,
=0
000 01。随着弹簧刚度
的减小,
稳定值略微减小,达到快速响应性基本不变,稳态误差分别为1.03%、1.04%,但当
=4.95×10
N/m时表现为连续高频振荡,其最大振荡误差为13.83%。采用ITAE控制器时,在负载工况切换前
快速响应性增加,在切换点处振荡最大,为1.87%,之后快速适应新的负载并保持稳定。随着弹簧刚度
的减小,
的稳定值减小,稳态误差略增大,分别为0.79%、0.85%、1.09%。与GWO-PD控制器相比,ITAE控制器响应速度快80%,稳定误差小18%,过渡过程波动小,尤其当串联弹簧刚度小时适应性好。表明ITAE控制器可以很好地满足SEA串联弹簧刚度的变化。
利用反应谱分析方法对一座具有高桥墩的非对称矮塔斜拉桥——津保桥的裸塔和全桥模型桥塔的抗震性能进行了研究。得出两种模型在地震作用下的响应规律。
3
3
2 环境刚度变化
根据上述设定的切换工况,其中
=200 kg,串联弹簧刚度
=4.95×10
N/m,环境刚度
=4.95×10
~4.95×10
N/m,对应预期负载位移
=0.56~0.5 m。可获得不同环境刚度下采用两种控制器的阶跃响应负载位移变化曲线,如图10、11所示。采用GWO-PD控制器时,GWO优化算法优化后的值为
=0
000 2,
=0
000 01。在负载切换点处平滑过渡,且随着环境刚度
的增加,
的稳定值减小,快速响应性减小,稳态误差分别为3.57%、0.99%、0.22%及0.22%。采用ITAE控制器时,在负载工况切换前
快速增加,在切换点处波动小,之后快速适应新的负载并保持稳定。随着环境刚度
的增加,
的稳定值减小,稳态误差分别为1.96%、0.39%、0.04%,在
=4.95×10
N/m时表现为连续的高频振荡,最大振荡误差为0.12%。可见,与GWO-PD控制器相比,ITAE控制器响应速度快81%,稳定误差小45%,鲁棒性好,但在负载切换点处存在微小波动。综合可知,ITAE控制器可以很好地适应环境刚度变化。
陆游在梁益生活时所写的作品以忧怨哀伤为主调,回到故乡山阴追忆梁益生活时所写作品却以欢喜快乐为主调。其主调的矛盾冲突不免令人产生疑问:哪种主调更真实?陆游在梁益地区到底过着怎样的生活?他对梁益地域的书写有多少真实性、可欣赏性?

4 实验测试
搭建实验平台测试SEA的位置控制性能,如图12所示。液压SEA测试装置,包括被测SEA含液压控制阀、液压缸和串联弹簧,负载、电控单元及液压源等,采用竖直布置的方式,借助载重质量块的自重实现液压缸输出端的加载,通过LVDT测试串联弹性执行器的位移变化。将构建的ITAE控制器算法和GWO-PD控制器算法及相关参数输入C-Space控制平台,而后开展两种控制方法下的性能测试,设定负载质量为200 kg,期望位移量为0.5 m。

实验测试结果如图13所示,对比了采用ITAE控制器和GWO-PD控制器时阶跃响应下的负载位移变化。其中ITAE控制器响应速度最快,最大超调量为1.54%,在3.8 s达到稳态;GWO-PD控制器响应速度较快,在4.3 s达到稳态。由于实物参数设置和测试环境的影响,实验结果存在较小超调,与仿真结果存在一定差异,但总体变化趋势基本一致,验证了理论模型的合理性和控制器设计的有效性。综合仿真和实验结果,可知ITAE控制下SEA具有良好的动态位置控制性能。

5 结 论
(1)建立了液压串联弹性执行器五阶状态空间模型,综合考虑SEA的控制特点和性能要求,设计了ITAE控制器,并通过分析SEA等效弹簧刚度对控制性能的影响确定出串联弹簧刚度的合理取值范围。
(2)分析了纯惯性负载工况下,采用ITAE控制器和GWO-PD控制器下SEA阶跃响应动态位置控制性能。实验结果与仿真结果基本吻合,表明了采用ITAE控制器时,SEA的动态位置响应速度快,稳定性好,且具有较高的控制精度。
(3)研究了纯惯性-复合负载切换工况下,采用GWO-PD控制器与ITAE控制器的SEA阶跃响应动态位置控制性能。结果表明,与GWO-PD控制器相比,ITAE控制器快速响应性好,稳态误差小,鲁棒性好,但在负载切换点存在微小波动。综合可知,ITAE控制器可以较好地适应串联弹簧刚度或环境刚度在一定范围内的变化,尤其适用于SEA串联弹簧刚度比较小的应用工况。
:
[1] 李尚达,孙珊珊,宋鹏飞.国产工业机器人发展与应用研究 [J].锻压装备与制造技术,2019,54(1):59-61.
LI Shangda,SUN Shanshan,SONG Pengfei.Study on development and application of domestic industrial robots [J].China Metalforming Equipment &Manufacturing Technology,2019,54(1):59-61.
[2] 许威,闫曈,许鹏,等.特种机器人行业的新锐:四足仿生机器人 [J].机器人产业,2021(4):50-57.
XU Wei,YAN Tong,XU Peng,et al.A new cutting-edge in the special robotics industry:four-legged bionic robot [J].Robot Industry,2021(4):50-57.
[3] 纵怀志,张军辉,张堃,等.液压四足机器人元件与液压系统研究现状与发展趋势 [J].液压与气动,2021,45(8):1-16.
ZONG Huaizhi,ZHANG Junhui,ZHANG Kun,et al.Research progress and development of hydraulic components and systems for hydraulic actuated quadruped robot [J].Chinese Hydraulics &Pneumatics,2021,45(8):1-16.
[4] 邵念锋,周秦源,邵晨阳,等.基于SEA的机器人关节柔顺特性研究 [J].组合机床与自动化加工技术,2020(11):33-37,41.
SHAO Nianfeng,ZHOU Qinyuan,SHAO Chenyang,et al.Research on joint compliance of robot based on SEA [J].Modular Machine Tool &Automatic Manufacturing Technique,2020(11):33-37,41.
[5] 王凤华,史英明,万媛.串联弹性驱动器的控制策略应用于工业机器人 [J].科学技术与工程,2020,20(2):642-647.
WANG Fenghua,SHI Yingming,WAN Yuan.Industrial robot control strategy of series elastic actuator [J].Science Technology and Engineering,2020,20(2):642-647.
[6] 孙宁,程龙.串联弹性驱动器设计、建模及在机器人上的应用 [J].自动化学报,2021,47(7):1467-1483.
SUN Ning,CHENG Long.Design and modeling of series elastic actuators with applications in robot [J].Acta Automatica Sinica,2021,47(7):1467-1483.
[7] HERBIN P,PAJOR M.Human-robot cooperative control system based on serial elastic actuator bowden cable drive in ExoArm 7-DOF upper extremity exoskeleton [J].Mechanism and Machine Theory,2021,163:104372.
[8] 陈朝峰,杜志江,张慧,等.基于柔性驱动关节的下肢外骨骼双模态切换控制 [J].机器人,2021,43(5):513-525.
CHEN Chaofeng,DU Zhijiang,ZHANG Hui,et al.Double-mode switching control of a lower limb exoskeleton based on flexible drive joint [J].Robot,2021,43(5):513-525.
[9] 陈豫生,张琴,熊蔡华.截瘫助行外骨骼研究综述:从拟人设计依据到外骨骼研究现状 [J].机器人,2021,43(5):585-605.
CHEN Yusheng,ZHANG Qin,XIONG Caihua.From anthropomorphic design basis to exoskeleton research status:a review on walking assist exoskeletons for paraplegics [J].Robot,2021,43(5):585-605.
[10] LEE C,OH S.Development,analysis,and control of series elastic actuator-driven robot leg [J].Frontiers in Neurorobotics,2019,13:17.
[11] GUENTHER F,VU H Q,IIDA F.Improving legged robot hopping by using coupling-based series elastic actuation [J].IEEE/ASME Transactions on Mechatronics,2019,24(2):413-423.
[12] MAZUMDAR A,SPENCER S J,HOBART C,et al.Parallel elastic elements improve energy efficiency on the STEPPR bipedal walking robot [J].IEEE/ASME Transactions on Mechatronics,2017,22(2):898-908.
[13] CONVENS B,DONG Dianbiao,FURNÉMONT R,et al.Modeling,design and test-bench validation of a semi-active propulsive ankle prosthesis with a clutched series elastic actuator [J].IEEE Robotics and Automation Letters,2019,4(2):1823-1830.
[14] SUN Xiaojun,SUGAI F,OKADA K,et al.Variable transmission series elastic actuator for robotic prosthesis [C]∥2018 IEEE International Conference on Robotics and Automation (ICRA).Piscataway,NJ,USA:IEEE,2018:2796-2803.
[15] 刘晓敏,耿德旭,赵云伟,等.气动柔性机械手手指运动学研究 [J].机械设计,2015,32(12):6-11.
LIU Xiaomin,GENG Dexu,ZHAO Yunwei,et al.Kinematic investigation on flexible pneumatic robot fingers [J].Journal of Machine Design,2015,32(12):6-11.
[16] UZUNOVIC T,SABANOVIC A,YOKOYAMA M,et al.Novel algorithm for effective position/force control [J].IEEJ Journal of Industry Applications,2019,8(6):960-966.

[18] 柯贤锋,王军政,何玉东,等.基于力反馈的液压足式机器人主/被动柔顺性控制 [J].机械工程学报,2017,53(1):13-20.
KE Xianfeng,WANG Junzheng,HE Yudong,et al.Active/passive compliance control for a hydraulic quadruped robot based on force feedback [J].Journal of Mechanical Engineering,2017,53(1):13-20.
[19] GUO Feng,CHENG Gang,PANG Yusong.Explicit dynamic modeling with joint friction and coupling analysis of a 5-DOF hybrid polishing robot [J].Mechanism and Machine Theory,2022,167:104509.
[20] 李敏,陈佳洲,何博,等.多段连续结构手功能康复外骨骼运动规划与结构优化 [J].西安交通大学学报,2019,53(10):1-9.
LI Min,CHEN Jiazhou,HE Bo,et al.Motion planning and structure optimization of a multi-segment mechanism-based hand rehabilitation exoskeleton [J].Journal of Xi’an Jiaotong University,2019,53(10):1-9.
[21] 陈琳,刘华辉,马忠睿,等.基于关节耦合补偿提高机器人绝对定位精度 [J].装备制造技术,2020(10):1-3,9.
CHEN Lin,LIU Huahui,MA Zhongrui,et al.Influence of joint coupling on absolute positioning accuracy of robot [J].Equipment Manufacturing Technology,2020(10):1-3,9.
[22] 朱圣晨,李敏,徐光华,等.多段连续结构的外骨骼手指功能康复机器人 [J].西安交通大学学报,2018,52(6):17-22,121.
ZHU Shengchen,LI Min,XU Guanghua,et al.Finger exoskeleton for rehabilitation of finger extension and flexion by multi-segment mechanism [J].Journal of Xi’an Jiaotong University,2018,52(6):17-22,121.
[23] 王春行.液压控制系统 [M].北京:机械工业出版社,1999:49.
[24] 杨勇.液压刚度理论在故障分析中的应用 [J].液压与气动,2012(11):89-91,100.
YANG Yong.Applying hydraulic stiffness theory on fault analysis [J].Chinese Hydraulics &Pneumatics,2012(11):89-91,100.
[25] DORF R C,BISHOP R H.Modern control systems [M].11th ed.Upper Saddle River,NJ,USA:Pearson/Prentice Hall,2008:330-338.

猜你喜欢
液压与气动(2022年10期)2022-11-27
电工技术学报(2022年20期)2022-10-29
汽车实用技术(2022年15期)2022-08-19
北京航空航天大学学报(2022年6期)2022-07-02
少男少女·教育管理(2022年3期)2022-05-12
北京航空航天大学学报(2021年4期)2021-11-24
汽车维修技师(2019年2期)2019-08-23
作文周刊·小学一年级版(2016年11期)2016-05-10
中学生数理化·八年级物理人教版(2014年1期)2015-01-09
中学生数理化·八年级物理人教版(2014年1期)2015-01-09
