
相机标定的精度影响实验分析
2022-04-20 07:23翟溢章宿洁华张士恒吴恩启
电子设计工程 2022年7期
翟溢章,宿洁华,张士恒,吴恩启
(1.上海理工大学 机械工程学院,上海 200093;2.库柏电子科技(上海)有限公司,上海 201201)
相机标定在整个机器视觉系统中占有重要地位,在一些对机器视觉精度要求较高的测量系统中,如工件尺寸测量[1]及双目视觉测距[2]等,标定的精度对三维重建和视觉测量有很大的影响,因此,研究相机标定精度的影响因素尤为重要。
影响相机标定精度的因素分为内部因素和外部因素,内部因素主要是标定算法和角点检测算法[3],外部因素主要是标定板平整性、标定图片数量、棋盘格尺寸、特征点数量、光照强度、标定物距等[4]。关于标定算法及其改进方法有很多[5-9],在如今这些技术已经日趋成熟的情况下有必要对外部因素进行实验分析。文献[10]建立了双目视觉系统误差分析模型,分析了摄像机标定精度、镜头参数及系统机构参数对系统测量精度的影响。文献[11]建立了结构光视觉系统中结构参数对测量精度的影响模型,得出测量物距对测量误差的影响是线性的,摄像机焦距与测量误差成反比的结论,上述文献主要是从理论研究的方式来说明对误差精度的影响,并没有足够的实验来论证。文献[12]提出并非黑白棋盘格尺寸越小,标定结果越好,但其选取棋盘格尺寸数量太少且只进行了3 组对比实验。文献[13]提出网格尺寸在6~14 mm 下进行标定的效果,相对来说值得参考,但其只是用仿真标定的方法进行分析,并没有充足的实验验证。文献[14]指出标定图片数量在4~10 张之间,可以有效减小标定误差,文献[15]提出标定图片数量在12~20 张之间对标定结果影响较小,文献[16]指出照片数量达到18~22 张时,误差值已经几近收敛。针对不同结果,文中以MATLAB 标定工具箱[12]为基础,对标定所需图片数量及棋盘格尺寸大小再次进行实验研究,并对标定棋盘格打印方式进行实验分析。实验结论为减小标定误差提供了一些参考。
1 相机标定原理模型
相机标定是指建立相机图像像素位置与景点位置的关系,其途径是根据相机针孔模型,通过已知特征点的图像坐标和世界坐标求解摄像机的模型参数。针孔模型共涉及4 个坐标系(如图1 所示):世界坐标系Ow-XwYwZw由用户自定义,用来描述环境中任何物体的位置;相机坐标系Oc-XcYcZc,其坐标原点Oc为摄像机的光心,Zc轴和光轴重合,Xc轴和Yc轴所在平面平行于图像坐标系平面;图像坐标系o-xy,坐标原点在光轴与图像平面的交点为o,x轴和y轴分别平行于相机坐标系的Xc轴和Yc轴;图像像素坐标系o-uv,其中,(u,v)是计算机图像坐标系中,空间任意一点Pw的成像点P的实际图像坐标,单位为像素。

图1 小孔透视成像几何模型
点Pw在世界坐标系的坐标(Xw,Yw,Zw)和对应的相机坐标(Xc,Yc,Zc) 可以通过旋转矩阵R和平移矩阵T表示如下:

点P在相机坐标系中的坐标为(Xc,Yc,Zc),其对应在图像坐标系中P′的坐标为(x,y),两者关系可由针孔相机模型得到:

其中,f为相机的焦距。点P′在图像坐标系中的坐标为(x,y),其对应在像素坐标系中P″的坐标为(u,v),两者关系可表示为:

其中,dx、dy为单个像素在x和y方向的物理尺寸,单位为mm;(u0,v0)为图像平面的中心像素坐标,根据式(1)~(3)可得针孔相机模型的数学表达式为:
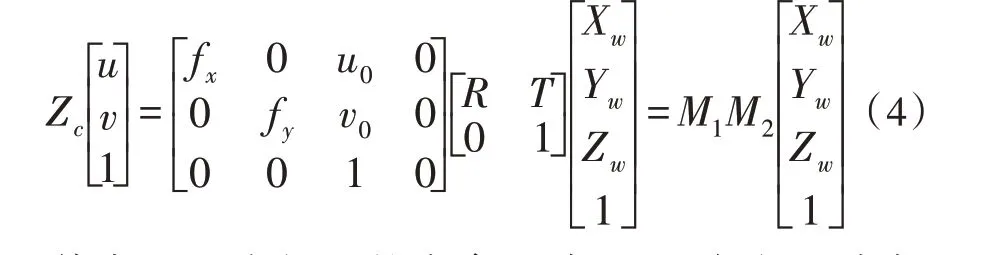
其中,M1为相机的内参矩阵,且只与相机内部结构有关,M2为相机外参矩阵,由相机在世界坐标系中的方位决定,确定内参和外参系数的过程即为相机标定。
2 影响相机标定的主要因素分析
2.1 棋盘格尺寸对标定精度的影响
不同棋盘格尺寸会产生不同的世界坐标点(Xw,Yw,Zw),因此,镜头畸变所产生的距离测量误差也将改变。以重投影误差为精度指标,针对不同的棋盘格尺寸作相应的对比实验。
2.2 标定图片数量对标定精度的影响
张正友标定法指出,若要标定相机,至少需要两个不同方向的图片才能求出内外参,共9 个参数[18],但标定图片数量过多,会造成累积误差。以有效焦距和主点坐标作为精度指标,对标定图片数量这一影响因子进行对比实验分析。
2.3 棋盘格打印方式对标定精度的影响
角点是棋盘格中一个非常重要的特征,它可以定义为图像边缘上曲率极大值的点或图像灰度剧烈变化的点。角点的提取精度直接影响后续标定及三维重建。不同的棋盘格打印方式会产生不一样清晰度的棋盘角点,Harris 角点检测算法[19-22]检测出的角点坐标必然会产生偏差,通过有效焦距、主点坐标及重投影误差来对比普通打印及彩印的标定效果。
3 实验过程及结果分析
文中所用相机选用的是大恒图像公司MER-500-7UM 型号的CMOS 工业相机,分辨率为2 592×1 944,像元尺寸为2.2 μm×2.2 μm,镜头选用的是日本的kowa 8mm 光学镜头。实验装置如图2 所示,将打印好的棋盘格图像粘贴到亚克力板上,调整平板支架的位置,让相机采集不同角度不同位姿下的图片。

图2 实验装置
3.1 棋盘格尺寸对标定精度影响的分析
在固定相机焦距为8 mm 的情况下,选择行列规格为10×7 的黑白棋盘格,采用9 种不同尺寸的棋盘格标定,尺寸分别为2 mm×2 mm、3 mm×3 mm、4 mm×4 mm、5 mm×5 mm、10 mm×10 mm、15 mm×15 mm、20 mm×20 mm、25 mm×25 mm、30 mm×30 mm。标定过程中,用控制变量法来保证同一方向的棋盘格可用不同的尺寸拍摄,保证位姿相同,每组拍摄20 张标定图片,该过程中为避免偶然误差,共进行5 组实验,得到的误差统计如表1 所示。

表1 不同棋盘格尺寸的重投影误差表
从表1 中可以看出,不是棋盘格尺寸越大,平均重投影误差就越大,当棋盘格尺寸小于5 mm 时,重投影误差反而比5 mm 时还要大,此时主点坐标和有效焦距与实际值也相差过大,不够稳定。当棋盘格尺寸大于5 mm 时,随着棋盘格尺寸的增大,其重投影误差也随之增大,一般重投影误差在0.3 个像素内,可认为标定效果不错,因此,棋盘格尺寸适宜选择为10~15 mm。
3.2 标定图片数量对标定精度影响的分析
针对不同文献得出的不同结论,该实验共进行了两组对比实验,选择了3 个标定板并将它们命名为A 板、B 板、C 板,其行列规格分别是10×7、10×7、13×16,与之对应的棋盘格尺寸为12 mm×12 mm、20 mm×20 mm、12 mm×12 mm,实验过程中,将标定板放在平板支架上(如图3 所示),调整平板支架的角度和位姿,共采集30 张图片,图3 为同一角度同一位姿的不同标定板图像,各个标定板图像有效焦距、主点坐标与图像数量的关系如图4 和图5 所示。

图3 同位置的A板、B板、C板图像
从图4 和图5 中的曲线可以看出,B 板使得有效焦距趋于稳定所需的标定图片数量最多,A 板其次,C 板最少;当图片数量达到8 张时主点横坐标和纵坐标接近理想值,当标定图片继续增多后,结果趋于平稳。综上所述,结合前人所得出的结论,不同标定板使得标定结果趋于稳定所需的标定图片数量不同,究其原因在于棋盘格角点数目和尺寸。当棋盘格角点数目相同时,棋盘格尺寸越大,所需的标定图片数量越多;当棋盘格尺寸相同时,角点数目越多,标定所需的图片数量就越少。
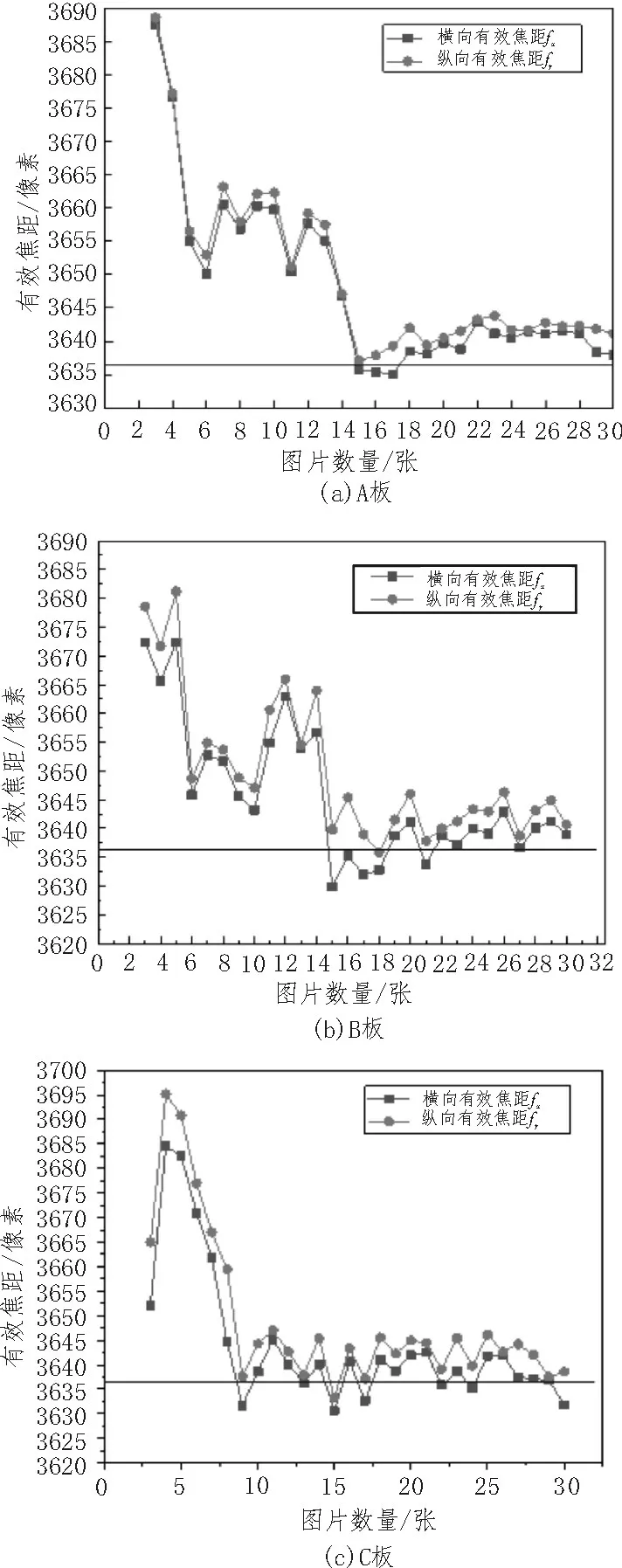
图4 图片数量与有效焦距的关系
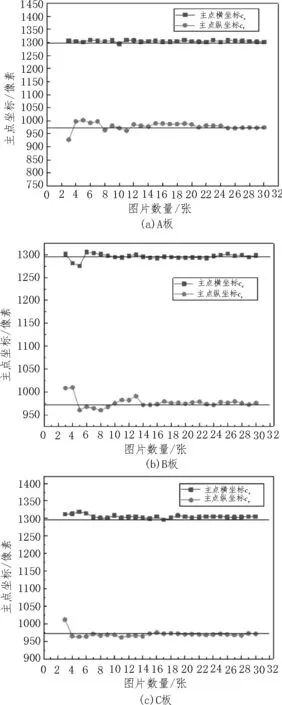
图5 图片数量与主点坐标的关系
3.3 棋盘格打印方式对标定精度影响的分析
分别用普通打印和彩印的方式打印棋盘格尺寸为15 mm 的10×7 标定纸(如图6 所示),将其粘贴到标定板上,在固定相机焦距为8 mm 的情况下,分别从不同方向不同角度采集15 张图片,对两张标定板分别进行标定,结果如表2 所示。

图6 普通打印和彩印的标定板对比图

表2 棋盘格打印方式的相机参数对比结果
从表2 中可以看出,彩印出来的标定棋盘格在有效焦距、主点坐标以及重投影误差方面都要比普通打印的精度要高,且与实际值的误差维持在5 个像素内,波动较小,因此,在打印标定纸时应选择彩印来提升角点的提取精度,提高标定精度。
4 结论
文中通过实验分析了棋盘格尺寸、标定图片数量、棋盘格打印方式对相机标定精度的影响。实验结果表明,较小的棋盘格尺寸的重投影误差较小;不同标定板使得有效焦距趋于稳定所需的标定图片数量不同,当棋盘格角点数目相同时,棋盘格尺寸越大,所需的标定图片数量越多;当棋盘格尺寸相同时,角点数目越多,标定所需的图片数量就越少;彩印出来的标定棋盘格主点坐标、有效焦距与实际值的误差维持在5 个像素内,波动较小、精度较高。
猜你喜欢
摄影与摄像(2021年12期)2021-10-01
艺术品鉴(2021年21期)2021-08-15
汽车维修与保养(2020年11期)2020-06-09
锦绣·上旬刊(2020年3期)2020-06-08
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
美与时代·城市版(2016年12期)2017-04-26
电子制作(2017年23期)2017-02-02
电子制作(2016年19期)2016-08-24
小资CHIC!ELEGANCE(2015年12期)2015-09-10
