多无人直升机协作搬运控制技术研究
2022-05-18 02:12苏子康邢卓琳
无人系统技术 2022年2期
苏子康,陈 嘉,邢卓琳
(1.南京航空航天大学自动化学院,南京 211106;2.山西大学自动化与软件学院,太原 030013)
1 引 言
直升机机外悬挂运输最早开始于20世纪50年代,主要用于紧急救援、军事行动、森林防火等任务,是直升机在军用和民用领域主要的用途之一[1-2]。然而,传统的单架直升机在执行外挂飞行时,由于机体易产生晃动,使得直升机与悬挂载荷之间存在耦合摆动问题,这严重影响了直升机和悬挂载荷的稳定性和飞行安全性[3-4]。为了减小耦合摆动,提高直升机悬挂系统操纵品质,许多研究者针对系绳直升机提出了抗摆动控制算法[5]。
近年来,随着多无人机协同技术的发展,相关研究也越来越多,其中将多无人机应用于悬挂载荷运输成为热门[6-7]。与单架无人机相比,多架无人机协作搬运,能更好地发挥其优势。其优势主要体现在更灵活的机动性、更大的承载能力、更强的任务执行力、更好的容错性和鲁棒性以及更高的经济可承受性。根据不同任务的载荷要求,灵活调整无人机的数量,实现资源的有效配置。此外,无人机数量的增加使得整个协作搬运系统结构更加稳定,有效避免了单架无人机的吊索摆动问题[1]。
然而,目前无人机协作搬运技术研究多采用四旋翼驱动,但由于四旋翼无人机载重尺寸和重量有限,会限制其运输能力。文献[7]利用拉格朗日力学建立了四旋翼协作搬运的动力学模型,将机体、缆绳和载荷之间的耦合效应考虑在内,设计了几何非线性PID 控制器来实现载荷位置和姿态的有效跟踪。文献[8]给出了直升机吊挂载荷的完整模型,设计了一种基于视觉估计的控制器,通过主动阻尼来防止载荷飘摆。文献[9]设计了一种基于反馈线性化多旋翼加速度动力学的滑模控制器,实现了载荷路径的稳定跟踪。文献[10]采用Udwadia-Kalaba 方法对悬挂载荷系统进行建模,提出了基于次最优LQR-PID 的扩展系统控制器与增稳系统,使每一个四旋翼飞行器保持姿态稳定并将载荷引导到预期方向。文献[11]将无源控制设计应用于多无人机悬挂载荷系统,调节无人机之间的相对位置并补偿载荷施加的垂直力,使系统在绳索拉力下的平衡点处于稳定。在文献[11]的基础上,文献[12]提出的协作控制算法将环境扰动的影响考虑在内,并简化了负载模型,用以运输质量未知的悬挂载荷。除了使用四旋翼飞机,文献[13]还尝试采用三架直升机来解决协作运输问题。与旋翼机相比,协作无人直升机具有更强的运输能力,在大质量载荷运输领域,直升机将更有优势。
值得关注的是,由于绳索上的拉力很难测量,现有的控制方法都假设其无法测量,所以设计出的控制器都缺乏相应的抗干扰能力。作用在无人直升机上的绳索拉力大大提升了耦合载荷运输系统的复杂性,对无人直升机的动力学特征和稳定性能也产生了较为严重的影响。因此,本文将无法测量的绳索拉力作为一种扰动,研究基于最小学习参数神经网络(Minimal Learning Parameter Neural Networks, MLPNN)的多无人直升机协作运输的鲁棒轨迹跟踪控制方法。
2 问题建模
本文多无人直升机的协作搬运系统由N架无人直升机、载荷以及用于连接载荷与直升机的绳索组成,其模型如图1所示。此悬挂载荷动力学方程可以用以下公式来表示[7,12]:
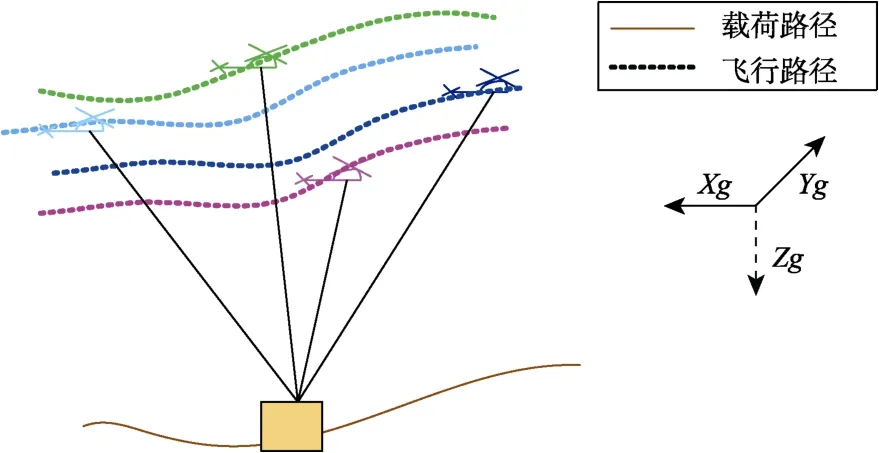
图1 多无人直升机协作搬运系统模型Fig.1 Cooperative handling system with MUHs.

其中,mL是负载的质量,g=[0,0,g0]T是重力加速度,=[xL,y L,zL]T是在东北地(North-East-Down)惯性坐标下载荷的轨迹矢量。TL∈R3为4架无人直升机作用在物体上的合力。
无人直升机的动力学模型可以如下形式表示[2]:
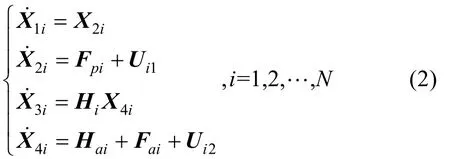
式中:
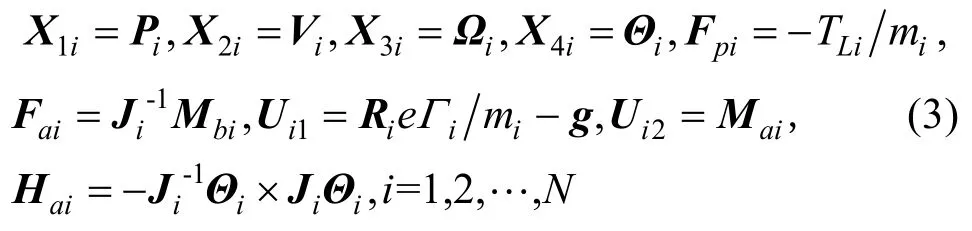
其中,N是无人直升机的数量,无人直升机i的内部状态变量包括位移=[xi,yi,zi]T,速度Vi=[Vxi,V yi,Vzi]T,姿态角Ωi=[ϕ i,θ i,φi]T以及姿态角速度Θi=[pi,qi,ri]T。Γ i,Mai=[Li,M i,Ni]T是推力和转动力矩矢量;mi为无人机的质量。Ji=d ia g(J xi,J yi,Jzi)是无人直升机i的转动惯量矩阵;Ri为无人直升机的机体坐标系到地面坐标系的转换矩阵,H i为无人直升机的姿态坐标系到角速率坐标系的转换矩阵;TL i,Mbi为负载对无人直升机i产生的作用力和力矩。并且

式中,PHi=[0,0,lHi]T,其中lHi是吊挂点到无人直升机i质心的直线距离;
本文将无法测量的Fpi和Fai分别视为集总干扰,并由下面设计的神经网络状态/干扰估计器对其进行估计。
但在协作运输模型中,需要对拉力TLi进行解析计算。无人直升机i与绳索i之间的约束可以用以下公式来描述:

式中,Li=Xi1-XL是从载荷指向无人直升机i的方向矢量;li是绳索i的标称长度。
根据 Udwadia-Kalaba 方法[14],可以保证(Li,li)=0。但是由于数值积分误差的存在,gi(Li,li) ≠0且g˙i(Li,li) ≠0。为了解决数值积分问题,通常会运用Baumgarte 方法[15]。因此,约束方程可以清楚地表示为:

其中,(·)+为Moore-Penrose 广义逆;α和β是反馈增益;au是在无视拉力的情况下,无人直升机和载荷的无约束加速度。
3 基于MLPNN 估计器的轨迹控制算法
本节设计了基于MLPNN 的轨迹控制算法,并基于李雅普诺夫理论对系统的闭环稳定性进行分析。
3.1 神经网络估计器
在非线性系统的控制设计中,神经网络因其在一定条件下的逼近能力而被广泛应用。神经网络有很多种,比如径向基函数神经网络(Radial Basis Function Neural Networks, RBFNN)和小波神经网络(Wavelet Neural Network)。由于RBFNN具有在任意精度范围内逼近任意光滑非线性函数的固有特性,本文引入RBFNN 来处理未知函数。为了减少计算负担,利用最小学习参数(Minimal Learning Parameter, MLP)技术来估计理想权值向量的最大范数[16-19]。RBFNN 的核心可以由下述引理1 进行概括。
引理1[18-20].对于给定连续有界函数f(X) ,它的初值为零,即f(0) =0 ,利用连续函数分离技术和RBFNN 逼近技术,则由RBFNN 输入X=[x1,x2,....,xn]T∈Rn与输出y=W*Th(X)∈Rn之间的映射关系,可得:

式中:ς>0 表示估计误差,其上界为Mς,为权重向量,h(X) =[h1(X),h2(X),...,hpn(X)]T∈Rpn,n为输入向量维数,p为权重向量维数,pn为节点数,并且

式中,c=[c1,c2,...,cn]T∈Rn为中心向量;变量bj表示基函数的宽度。
由式(7)可知,可以采用RBFNN 的输出来逼近连续有界函数f(X) ,估计误差为ς>0 。需要注意的是标称权重向量*W通常是未知的,因此,w1*,w*2,...,w*pn需要适时自适应更新。为了减少计算量,定义φ=||W*||2,用以替代标称权重向量W*,从而可以大幅减少RBFNN 计算量。该思路也是基于MLP 的RBFNN。
对于基函数式(8),指数函数exp(·) 是严格单调递增的, 且, 故可得0<hj(X) ≤1。因此,存在正常数,使得hj(X)≤。
3.2 轨迹控制算法
根据反步设计思路[21-25],协作无人机轨迹控制算法可以通过如下步骤实现。
Step 1.定义轨迹跟踪误差ei1=Xi1-Xid1,其中Xid1是直升机i的飞行轨迹,则ei1是关于时间的微分。

然后我们设计轨迹控制律

其中,正定矩阵ki1=diag(k11,k12,k13)是反馈增益。
为避免出现“微分爆炸”问题,设计带有时间常数τ2>0的DSC(11),以便求取指令信号的微分。

根据式(11),可以得到滤波误差的微分:

注1.根据Swaroop 等[22]的研究结论,对于式(12)所描述的滤波误差动态ε˙i2,存在一个正常数Mi2,max> 0,使成立。
Step 2.定义了速度误差ei2=Xi2-Xid2,其中Xid2由DSC 式(13)获取。然后设计速度回路虚拟控制律。

其中,正定矩阵ki2=diag(k21,k22,k23)是反馈增益;为Fpi估计值。
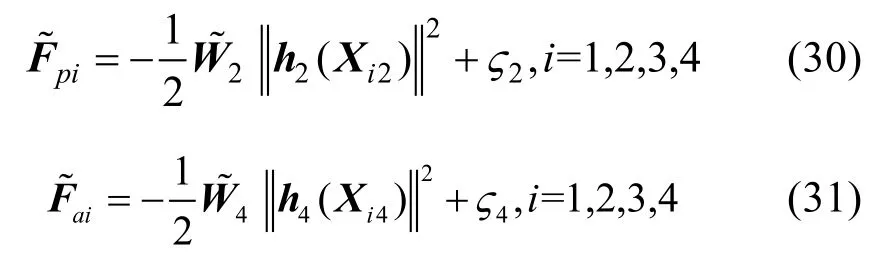
根据 RBFNN 逼近原理,Fpi可由如下MLPNN 估计:

式中,W2*=[Wx*,W y*,Wz*]T为权重向量,Wx*、Wy*和Wz*为理想权重;h2(Xi2) =[h2x(Xi2),h2y(Xi2),h2z(Xi2)]T为高斯基函数;Xi2为估计器的输入;逼近误差满足为正常数。
为避免传统权重系数自适应更新律可能导致的MLPNN 在学习时出现瞬态高频震荡的问题,构建速度回路MLPNN 状态/干扰估计器[20]:
式中,η2=[η2x,η2y,η2z]T,η2x> 0,η2y> 0,η2z>0为待设计的估计器增益,是状态估计误差。
同时,设计新型权重向量自适应更新律:

式中,Γ2=diag(Γ2x,Γ2y,Γ2z)为自适应增益矩阵;σ2=diag(σ2x,σ2y,σ2z)为待调参数。
注2.通过构建MLPNN 状态/干扰估计器,对无法测量的拉力进行准确重构。速度的估计误差,对权重向量的估计(式(15))起主要作用,这样就使传统权重更新律依赖于控制跟踪误差ei2的问题得以解决,将状态/干扰估计器和控制器参数分离,使控制器设计简化。
注3.状态估计误差的初值可人工设置为零,避免了传统神经网络在跟踪误差出现跳变时可能产生的瞬态高频震荡问题;此外采用MLP 技术用权重向量的模替代权重向量元素,减小了神经网络的计算负担。
根据动力学公式(2),虚拟控制向量Ui1可以写成
其中,ϕ*i,θ*i和ψ*i是期望的滚转角,俯仰角和偏航角的指令。
因此,


Step 3.定义姿态角误差ei3=Xi3-Xid3。然后设计虚拟姿态控制律

其中,ki3=diag(k31,k32,k33)是反馈增益。


Step 4.定义角速度跟踪误差ei4=Xi4-,其中,通过DSC(21)得到。然后建立无人直升机理想控制律。

其中,ki4=diag(k41,k42,k43)是反馈增益;为Fai估计值。
类似地,Fai可由如下MLPNN 估计:

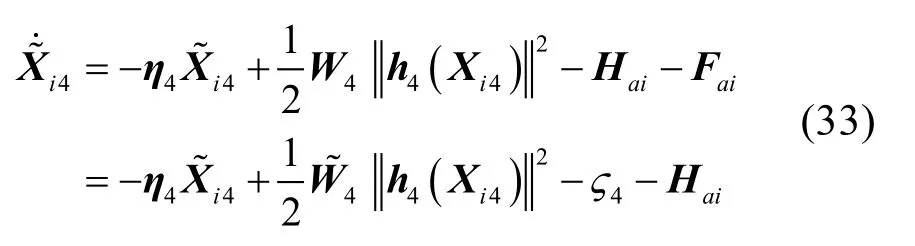
构建MLPNN 状态/干扰估计器式(26),以便逼近重构干扰Fai。
式中,η4=[η4p,η4q,η4r]T为待设计的估计器增益;是状态估计误差。
此外,设计权重向量自适应更新律:

式中,Γ4=diag(Γ4p,Γ4q,Γ4r)为自适应增益矩阵;σ4=diag(σ4p,σ4q,σ4r)为待调参数。
3.3 稳定性分析
定理1.考虑非线性动力学模型(2),设计控制律式(10)、(13)、(21)和(24),DSC 式(11)、(19)和(22),状态/干扰估计器式(15)和(26),以及自适应更新律式(16)和(27),则对给定连续光滑轨迹指令信号,通过选取合适的参数。可确保所有的误差信号eij,j=1,2,3,4和εi,i=1,2,3,4,j=2,4都一致最终有界。
证.以下分两步对上述定理进行证明。
(1)首先,求取系统误差信号eij,j=1,2,3,4和的微分。

同理可得:
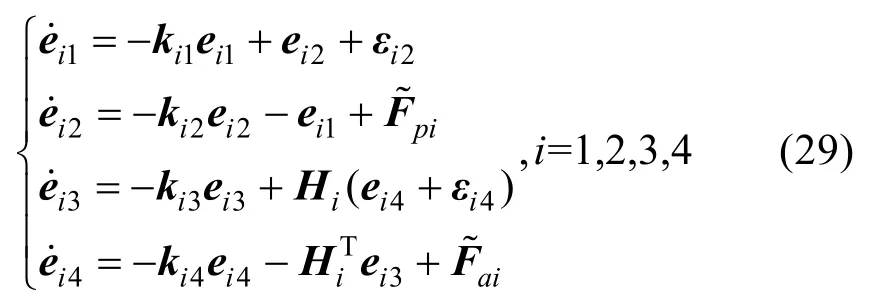
其中,干扰估计误差:


(2)选取如下李雅普诺夫函数,对定理1 进行证明。
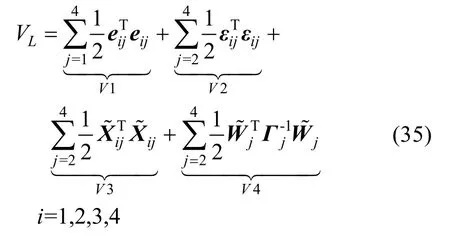
则由式(12)、式(20)、式(23)和式(29)可求出李雅普诺夫函数前两项的导数。
由状态估计误差式(32)和式(33)可求出李雅普诺夫函数第三项的导数。

则
又由Young 不等式,可将式(38)进一步整理为:

记
设计控制参数满足以下条件:
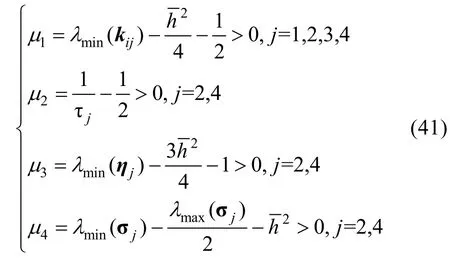
则不等式(39)可写成:
式中,μ=min{μ1,μ2,μ3,μ4}。
因此,当μ>Ω/V,有<0。即通过合适的控制参数选取,可以确保所有系统误差最终一致有界。证毕。
4 飞行仿真校验与分析
为了验证所提算法的有效性,本节进行数值仿真。本文采用文献[2]中直升机的物理参数。仿真中,控制器相关参数选取如下。
直升机参数:N=4,L=10,lHi=1,悬挂物重mL=100,无人机质量mi=500,转动惯量Ji=diag(210,220,210);
反馈增益:ki1=diag(3,3,3),ki2=diag(6,6,6),ki3=diag(12,12,12),ki4=diag(25,25,25);DSC 时间常数:τ2=0.1,τ3=0.01,τ4=0.01。
MLPNN 参数:pn=500;ci=0,i=0,1,...,n;b j,j=1,2,...,pn;η2= 90 ×diag(1,1,1),Γ2= 2 ×diag (1,1,1),σ2=0.5 ×diag(1,1,1),η4=diag(100,70,70),Γ4= 20 ×diag(1,1,1),σ4=diag(20,0.02,0.02)。
图2给出了多无人直升机协作搬运的三维轨迹。可以直观地看出飞机能够很好地跟踪给定的轨迹指令,完成预期目标将负载运往目的地。

图2 多无人直升机协作搬运的三维轨迹结果Fig.2 3D trajectory results of cooperative MUHs system.
图3将3 个轴上的轨迹详细的描绘出来。从X轴上只能看到第1、第3 和第4 架飞机的轨迹曲线,说明负载、第2 架飞机和第4 架飞机在同一位置。从Y轴上同样只能看到3 条轨迹曲线,说明负载、第1 架飞机和第3 架飞机在同一位置。从Z轴上只能看到两条轨迹曲线,4 架飞机的轨迹曲线重合为一条曲线,说明4 架飞机位于同一高度。所以飞机的位置是第1 架飞机在前,第3架飞机在后,第2 架和第4 架飞机在中间分别位于负载两侧,从而印证了三维轨迹结果。此外,通过轨迹数据点计算出来的三轴平均相对误差仅有0.2%。图4为无人直升机1 在三轴上的速度曲线,可以看到实际速度能够很好地跟踪速度指令。除了起飞时三轴上的速度都变化,其他时候X轴上的速度保持在1m/s,Z轴上的速度也保持不变。由于飞机在Y轴上不断变化方向,所以速度也在不停地变化。图5~6 分别是无人直升机1 的姿态角和角速度曲线,只有在起飞时才会变化,其他时候保持不变。
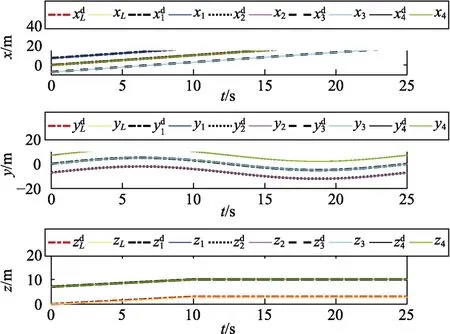
图3 多无人直升机详细的轨迹曲线Fig.3 Trajectory results of MUHs

图4 无人直升机1 的速度曲线Fig.4 Velocity results of UH1
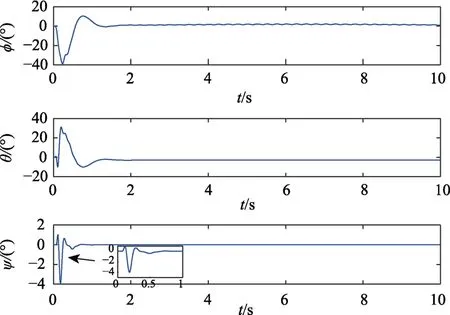
图5 无人直升机1 的姿态角曲线Fig.5 Attitude angle curve of UH1
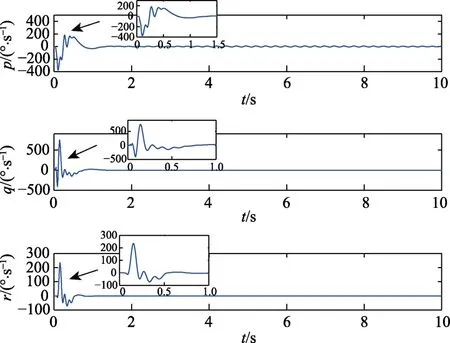
图6 无人直升机1 的角速度曲线Fig.6 Angular velocity curve of UH1
图7~8 分别为无人直升机1 的速度和角速度的集总扰动曲线。可以看到扰动值很小,对系统影响不大。图9给出了协作搬运系统的绳索拉力。在绝大多数状态下,拉力平稳无波动,这意味着无人直升机与载荷之间的绳索始终保持张紧状态。
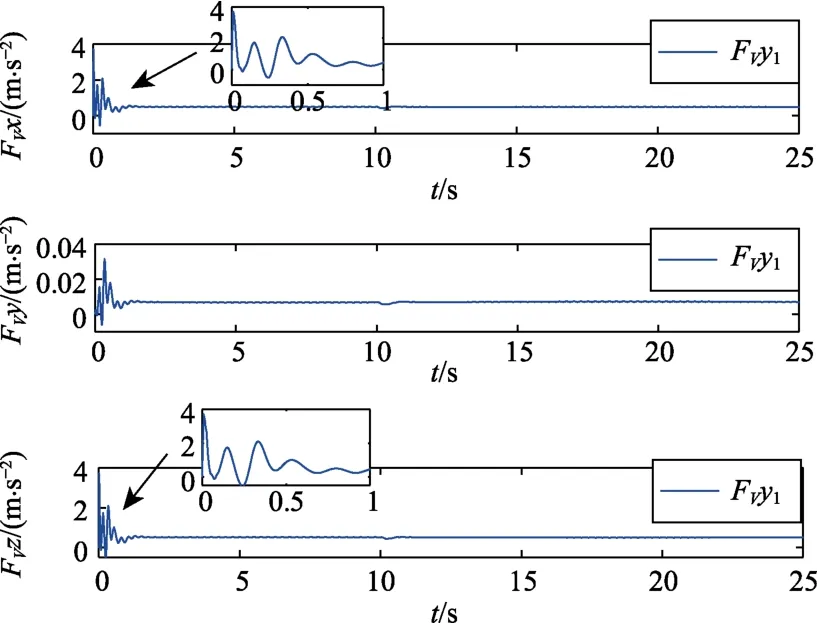
图7 无人直升机1 的速度集总扰动曲线Fig.7 Velocity lumped disturbance curve of UH1
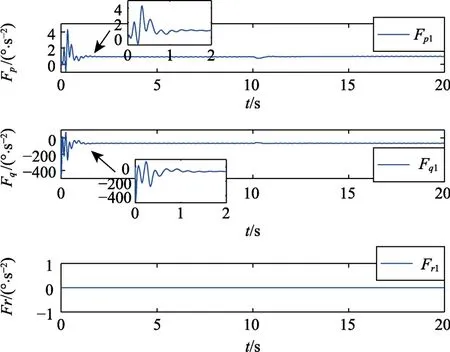
图8 无人直升机1 的角速度集总扰动曲线Fig.8 Angular velocity lumped disturbance curve of UH1
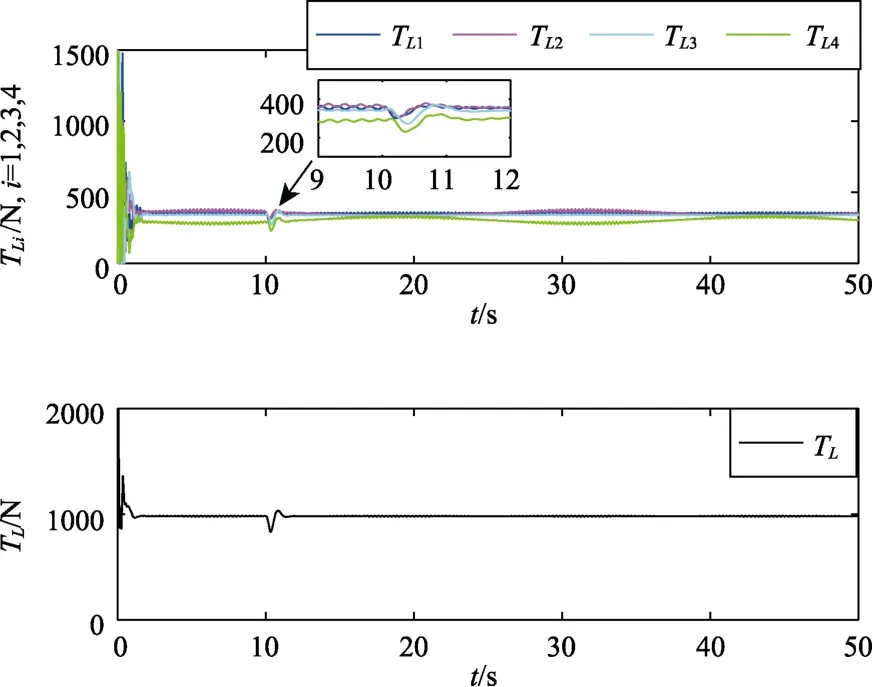
图9 协作搬运系统的拉力Fig.9 Tension of cooperative handling system
5 结 论
本文对多无人直升机协作搬运的鲁棒控制问题进行了研究。首先,构建无人直升机的6 自由度仿射非线性动力学模型和绳索悬挂运输的动力学模型,为研究非线性控制设计打下基础。然后将悬挂拉力视为集总扰动分量,通过状态/扰动在线估计器进行重构。结合MLPNN 状态/干扰在线估计器和 DSC 技术,设计了一种基于MLPNN 状态/干扰估计器的协作搬运轨迹控制算法。最后,利用仿真结果验证了该控制算法有效的跟踪性能。
猜你喜欢
选煤技术(2022年2期)2022-06-06
湖北工业大学学报(2021年2期)2021-04-28
金桥(2020年9期)2020-10-27
金桥(2020年9期)2020-10-27
航空发动机(2020年3期)2020-07-24
人大建设(2019年4期)2019-07-13
发明与创新·中学生(2018年2期)2018-02-07
时代英语·高二(2017年4期)2017-08-11
读者(2017年14期)2017-06-27
天津体育学院学报(2016年3期)2016-12-18