
一种空管雷达风电场干扰抑制方法
2022-05-23 06:39张衡,唐瑾,林强,焦艳
雷达科学与技术 2022年2期
张 衡, 唐 瑾, 林 强, 焦 艳
(1. 空军预警学院, 湖北武汉 430019; 2. 四创电子股份有限公司, 安徽合肥 230088)
0 引言
近年来,随着资源供给的日趋紧张,以及环境问题的日益突出,可再生环保资源逐渐引起了人们的重视。风能作为一种清洁无污染的可再生资源得到了广泛的认可,风力发电是运用风能的一种重要方式,其对于调整能源结构,节约资源利用,保护生态环境,促进经济的高效可持续发展具有重要的意义。
由于风力涡轮发电机(简称风轮机)庞大的尺寸、强散射特性以及风轮机叶片的微动(Micro-motion)特征,风电场会对雷达产生严重的影响。主要包括三个方面:1)风电场回波可能在信号中占主导地位而遮挡来自飞机的回波信号,导致“雷达盲区”;2)飞机航迹可能由于与来自风电场的回波的错误关联而偏离其正确的路径;3)风电场的回波可能导致在风电场附近产生高的虚警。
空管雷达是两坐标雷达,由于没有多个波束,风电场产生的回波和目标产生的回波具有同样的特性,而且在幅度上更强一些,因此受风电场干扰更加严重。目前,大部分空管雷达抑制风电场干扰的方法是在风电场区域中进行距离方位门限调整或者航迹起始准则的调整。这些方法在抑制干扰的同时会显著降低雷达性能,并有可能使得空管系统失效。因此,本文根据传统空管雷达结构特点和技术发展现状,提出采用高低波束并行处理方法,构建空管雷达抗风电场干扰系统总体框架,并设计了关键模块的流程和处理方法。仿真结果表明,该方案有效可行。
1 空管雷达及风轮机回波模型
1.1 空管雷达
在实际空管雷达站的建设中,一般将一次雷达和二次雷达合装架设,充分发挥两种雷达探测目标的不同机理,这样能够进行优势互补。合装的空管雷达除了天线座及旋转机构外,两种雷达都是按照双机热备份设计,确保能够全天候不间断进行值班,其结构如图1所示。其中,空管一次雷达的高低波束回波信号在接收机中进行合成,没有进行独立处理。

图 1 空管雷达系统组成框图
1.2 风轮机回波模型
一个完整的风轮机主要包括叶片、桅杆和引擎舱三个部分,而且每个部分的电磁波散射特征不同。桅杆和引擎舱相对雷达来说是静止的,对电磁波有较强散射,表现为具有一定雷达截面积的静止目标,与地物杂波一样,可当作地物杂波使用动目标显示滤波器进行处理;叶片则处于转动的状态,表现出运动目标的特征,且叶片不同部分的转动线速度不同,故其雷达回波信号具有很宽的多普勒谱。
雷达与风轮机叶片位置关系如图2所示。点为风轮机叶片的旋转中心,点为旋转叶片上的任一散射点,点为雷达所在位置,直线方向为雷达波束方向(Line of Sight,LOS),雷达与叶片旋转中心的距离为。
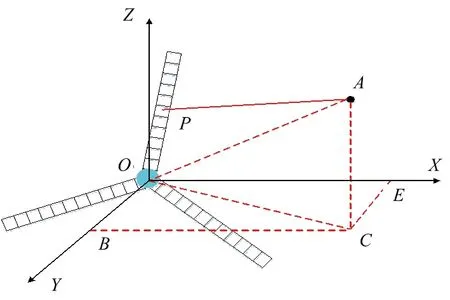
图2 雷达与风轮机叶片位置关系
以散射点为例进行分析。雷达波束相对于风轮机的方位角为∠,记为;雷达波束相对于风轮机的俯仰角为∠,记为;雷达波束与叶片散射点的夹角为∠,记为();叶片散射点旋转角为∠,记为()。根据空间直线夹角公式可得四者之间的关系为
cos()=sinsincos()+cossin()
(1)
点到叶片旋转中心的距离记为,在远场条件下()→0,因此可得点到雷达的距离为

-cos()
(2)
若发射信号为单载频信号,其频率和波长分别为和,光速为,则散射点在雷达处的回波信号为



(3)
对上式进行去载频和去恒定相位项处理,可得散射点回波的基带信号为

(4)
设叶片长度为,对上式进行积分可得整个叶片回波的基带信号为
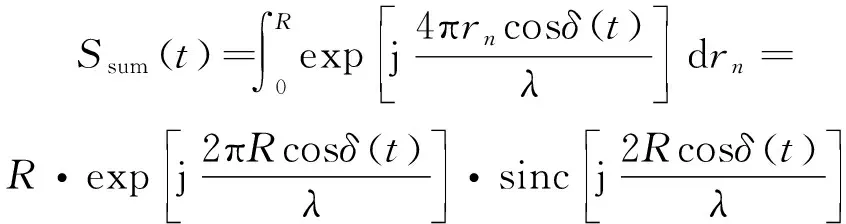
(5)
若一个风轮机包含个叶片,且第个叶片与雷达波束的夹角为(),可得所有叶片总回波的基带信号为



(6)
由风轮机回波模型可以看出,影响风轮机杂波特征的参数主要有相对距离、叶片长度、叶片转速、旋转初相、俯仰角和方位角等,其中叶片转速和旋转初相的时变性较大,是影响风轮机杂波模型的主要参数。
通常风轮机成片存在,风电场的回波模型可以在上述模型的基础上进行改进,需要在考虑多径和遮蔽影响的前提下进行研究。
2 空管雷达风电场干扰抑制方法
风轮机的高度一般只有100 m左右,并且其回波特征相对固定,而空中目标的高度更高并且其回波特征与风电场的回波特征存在较大的差异。因此,本文在现有空管雷达结构基础上,提出了一种风电场干扰抑制方法。该方法在一次雷达中使用两个独立的并行处理的低波束和高波束接收通道,并加入了高度估计和分类识别模块,如图3所示。

图 3 空管雷达抗风电场干扰设计结构框图
2.1 风电场干扰抑制流程
一次雷达收发模块向空间发射雷达波束,并接收目标反射的高波束回波信号和低波束回波信号;二次雷达收发模块向空中目标发送询问信号,并接收目标发出的应答信号;低波束回波信号处理模块对低波束回波信号进行检测,确定目标的低波束检测幅度和相位;高波束回波信号处理模块对高波束回波信号进行检测,确定目标高波束的振幅和相位;一次雷达数据处理模块利用高低波束检测到的振幅和相位计算目标的仰角,并利用目标的仰角计算目标的估计高度。
当确定被检测到的目标是由于风电场引起的杂波时,一次雷达数据处理模块向低波束和高波束信号处理提供杂波检测反馈信号,表示检测错误。低波束和高波束信号处理将进行第二次处理,把风电场杂波从回波信号中去除,并确定当前雷达回波信号中是否存在其他目标。
一次雷达数据处理模块可以通过三种条件来判断检测是否是风电场杂波:①高低波束检测到的目标的幅度是否高于到风电场杂波的幅度检测门限;②估计的高度是否低于风电场杂波高度门限;③检测目标的方位和距离与距离方位门限图(存储雷达周边风电场位置)所示的风电场位置是否对应。
一次雷达数据处理模块生成一次雷达探测信息(距离、方位、振幅、多普勒值和估计高度),与二次雷达的探测信息(距离、方位、振幅、多普勒值、高度和身份)进行融合,并进行点航迹处理。考虑到杂波剩余会引起错误的检测,分类识别模块根据多个扫描的检测信息,通过综合分析各阶段处理数据和改进的数据关联处理,还可以进一步提高飞机和风电场杂波的识别能力。
2.2 高度估计
对于不同目标,由于雷达反射截面积(RCS)、距离、仰角等差异,回波信号幅度不同,不能直接根据信号幅度大小确定目标仰角或高度。但高低波束通道接收到的同一目标回波信号的幅度差则只与图4中的高低波束增益差有关。

图4 高低波束俯仰面增益仿真图
对图4中的两个增益曲线作差,可以得到回波幅度差,也就是比幅值和目标仰角的对应关系,如图5所示。图5通常称之为比幅角敏函数曲线。对于空管一次雷达,得到高低波束回波比幅曲线后,再根据比幅角敏函数,就可以得到目标的仰角。
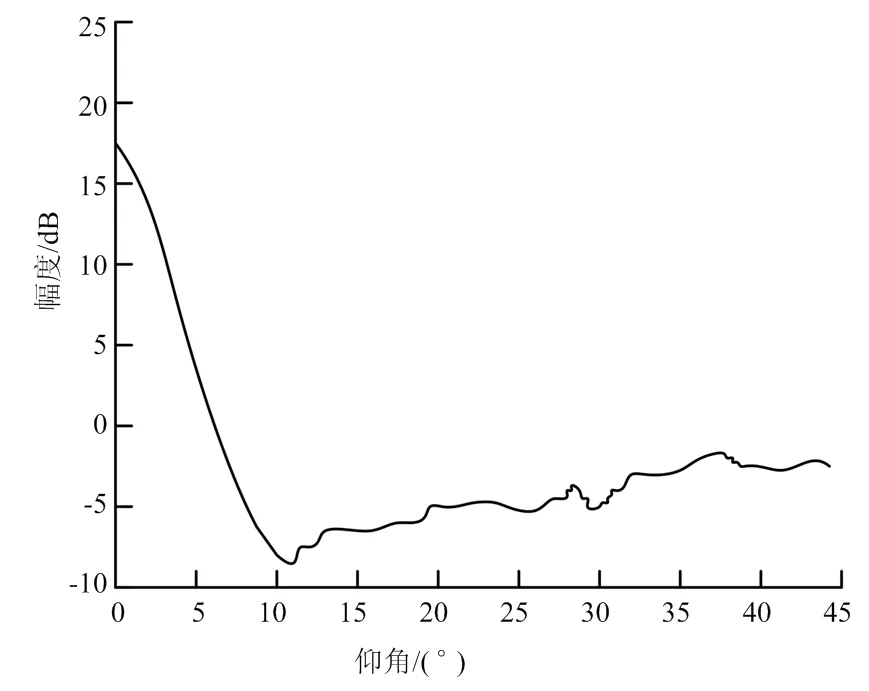
图5 比幅角敏函数曲线仿真图
类似比幅角敏函数,利用高低波束回波之间的相位差,也就是比相值和目标仰角之间的对应关系,还可以得到比相角敏函数曲线,如图6所示。

图6 比相角敏函数曲线仿真图
比幅法和比相法测仰角均存在多值,即测仰角模糊问题。可以综合利用比幅、比相角敏函数信息解模糊的方法得到目标的仰角。
测得目标仰角后,结合雷达获得的目标距离信息,根据下式可以得到目标的高度。
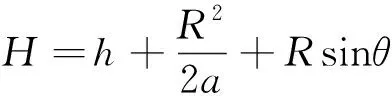
(7)
式中,为雷达天线架高,为等效地球半径,取8 493 km,为目标距离,为目标仰角。
由于天线平台水平误差和天线波束指向误差、非标准大气折射误差、阵地周边环境等外界因素引起的误差,以及机内噪声接收通道幅相等雷达自身因素引起的误差等因素会对测高精度产生影响,因此高度估计需要进行校准。高度估计校准以二次雷达的高度信息为基准,对一次雷达高度估计进行周期性地修正。
2.3 杂波的估计与抑制
2.3.1 杂波的估计
利用风电场回波的时频特征,根据风轮机“时频闪烁”与风轮机微动参数间的对应关系,借鉴图像处理的相关知识,对风轮机的转速和初相进行估计。
1) 转速估计
目前主流的风轮机叶片数量均为3,每两片叶片之间的夹角为120°。在风轮机叶片旋转过程中,当雷达视线垂直照射叶片时的风轮机回波达到最强,出现一个峰值,如图7所示。随着叶片的转动,峰值周期性地出现,且任意两个相邻的峰值对应的时间间隔相同,在该时间间隔内风轮机旋转了60°,也即转过了1/6转。因此可根据峰值出现的时间间隔Δ,求得风轮机的转速估计值(单位:r/s)为
(8)

图7 叶片转动与峰值时刻对应关系示意图
通过寻峰函数找到峰值出现对应的时刻,便可以对风轮机的转速进行估计。
2) 风轮机初始相位估计
基于时域波形图的风轮机微动参数提取方法不仅可以提取叶片的旋转频率,同时还可以根据峰值出现的位置估计风轮机叶片的初始相位。假设初始时刻的叶片初始相位为,当回波出现第一个波峰时刻时,叶片转过的角度为,如图8所示。要判断叶片的初始相位估计值,还需借助时频域波形图的闪烁时刻,若第一个波峰出现时的时频闪烁值为正,此时的初始相位估计值为

(9)
若第一个波峰出现时的时频闪烁值为负,此时的初始相位估计值为

(10)


图8 峰值时刻与相位对应关系示意图



(11)
2.3.2 杂波抑制
高低波束处理方法一致,下面以低波束处理过程为例进行说明,处理流程如图9所示。

图9 风电场杂波滤波流程图
假设接收到的低波束信号为(),脉冲压缩波的自相关函数为(),接收机噪声为(),有个风轮机回波信号和个飞机目标。则接收到的信号可以表示为


(12)
式中:,,L分别为第个风轮机的回波信号的幅度、相位和时延;,,L分别为第个目标的回波信号的幅度、相位和时延。
根据雷达回波信号的时频分析估计出风轮机的转速和初相,得到风轮机杂波的幅值、相位和时延。则从接收数据中滤除杂波后的信号为
()=()-ej(-)
(13)
通过脉压后旁瓣的变化判断是否达到抑制目的。


(14)
如果式(14)成立,则令()=(),()=()+ej(-)。其中,是没有进行脉冲压缩的宽度,_是脉冲压缩后宽度,是用来控制期望的副瓣压缩量。如果式(14)不成立,则令()=(),()=(),再进行下一次迭代,找出下一个峰值。
如果所有风轮机杂波信号得到合理估计,系统从原始低波束回波数据中去除所有风轮机回波估计信号,再进行多普勒处理。
3 实验及结果分析
实验参数设置: 1)雷达参数 载频为2.8 GHz,脉冲宽度为100 μs,脉冲重复频率为1 000 Hz,多普勒滤波器组个数为8;2)风轮机参数 距离雷达50 km,包含3个叶片,长度均为40 m,叶片旋转速度为15 r/min。叶片旋转面与雷达视线的夹角为23°。目标距离雷达50 km,信噪比=15 dB。风轮机反射回波幅度服从瑞利分布,且与目标回波位于同一距离单元,杂噪比=35 dB。
图10和图11给出了采用本文所提风电场杂波滤除方法后的目标检测性能曲线。为了便于比较,图中也同时给出了采用传统的多普勒滤波器组进行目标检测的性能曲线。需要说明的是,图中的结果是500次蒙特卡洛仿真结果的平均值,传统处理方法是指传统空管雷达不进行专门的风电场杂波滤除,由所有多普勒通道的检测结果进行数据融合后得到的结果。从图10可以看出,采用本文提出的风电场杂波估计与滤波方法后,雷达在风电场杂波背景中的目标检测性能得到了显著提升,尤其是在低虚警概率情况下,检测性能提升可达50%以上。从图11可以看出,当被检测单元的SCR (信杂比) 逐渐降低时,仅采用传统的多普勒滤波器进行检测时,雷达的检测性能下降严重,甚至导致无法检测到目标。而本文所提方法几乎不受信杂比的影响,始终保持了80%以上的检测概率,表明了该方法的有效性和稳健性。
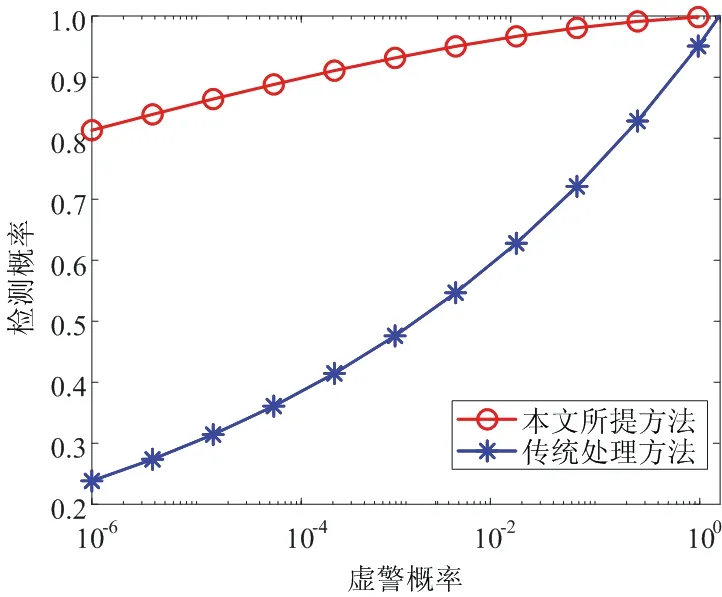
图10 检测性能曲线
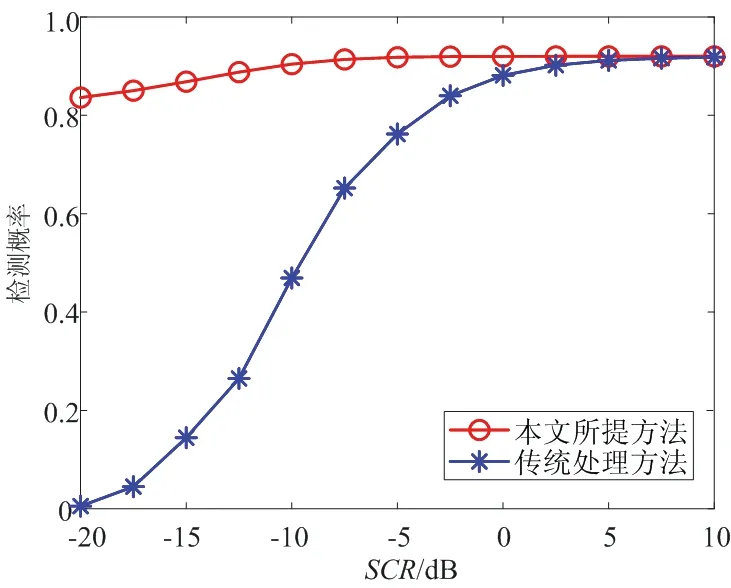
图11 检测概率随平均SCR的变化曲线
4 结束语
本文分析了空管雷达受风电场干扰的原因,在建立风轮机回波模型的基础上,根据现有空管雷达结构,充分利用风电场杂波与目标回波特征差异,建立了一种空管雷达抗风电场干扰方法,并从系统结构和流程、高度估计和杂波估计以及抑制的流程和方法等方面进行设计,提高了雷达抗风电场干扰的能力。实验仿真结果验证了方法的有效性,该研究对常规情报雷达设计也具有十分重要的参考价值。
猜你喜欢
珠江水运(2022年13期)2022-08-04
大飞机(2021年7期)2021-09-05
现代信息科技(2021年21期)2021-05-07
移动通信(2020年9期)2020-11-06
现代电子技术(2020年3期)2020-08-04
数码设计(2018年7期)2018-10-20
科学与财富(2017年1期)2017-03-17
中国新通信(2016年8期)2016-06-03
中学课程辅导·教师通讯(2014年16期)2014-11-24
现代电子技术(2009年8期)2009-06-25
