
基于模态应变能的结构损伤识别算法分析
2022-05-27 10:12林瑞慧
福建交通科技 2022年2期
■林瑞慧
(福建省交通科研院有限公司, 福州 350005)
随着我国经济建设的需求和技术的不断革新,桥梁的建设规模越来越大,大跨预应力混凝土连续刚构桥在我国交通系统中扮演着极其重要的角色。但是,桥梁服役阶段在各种因素的影响下,其寿命较原设计寿命可能会有不同程度缩减,这对交通系统的整体安全性造成重大隐患。 因此,探究一种有效的桥梁损伤识别方法,并构建桥梁结构疲劳寿命预测的整体性评估体系具有重要的现实意义。
对于结构损伤识别,当前的方法主要分为基于静力、动力和模态的损伤识别。 在各类的损伤识别方法中, 根据检测原理不同会有不同的检测效果,检测效果由低到高排序如下: 仅识别结构是否损伤;确定损伤位置;确定损伤位置与损伤程度;确定剩余寿命评估;完整性评价。 损伤识别的方法有很多,从识别的效果来看,大多数方法仅限于损伤位置的识别。 有一些基于优化算法的损伤识别方法被用来识别损伤的位置和程度[1-3]。这些方法的主要思路是将损伤识别问题转化为最优解的优化问题,其目标函数通常是通过测量的结构细微形变或模态特征之间的差异来定义的,设计变量是结构体的各项参数。 目前,遗传算法(GA)、粒子群算法(PSO)、人工蜂群(ABC)等几种启发式优化算法已成功应用于结构损伤定位[4]。 优化算法的一个重要优点是由于目标函数只涉及这些向量的主要组成部分,因此不需要完整的模型特征(如模态或位移)[5];另一个优点是可以确定结构损伤的位置和程度。 在优化算法之中,差分进化算法的表现尤为突出,在运算速度的稳定性上都有较强的优势。 因此,本文就改进的差分进化算法对均质金属梁和钢筋混凝土梁损伤位置的识别进行探讨。
1 模态分析方法
1.1 模态柔度理论
无阻尼多自由度体系振动方程如下:

式(1)中:[M]为质量矩阵;[K]为刚度矩阵;{x¨(t)}为加速度向量;{x(t)}为位移向量。 对方程(1)求特解:

将式(2)代入式(3)可得:

式(3)中:ω 为特征值;φ 为特征向量。 由于φ存在非0 的解, 所以令|K-ω2M|=0, 对该式进行求解,可以得到n 个互异的正根。 从低阶到高阶的排序为:0<ω1<ω2<...<ωn。 依次将ωi代入式(3),求解出对应的向量。 n 个ωi对应求解出n 个基础向量。 将基础向量归一化处理得到各阶主模态φi。 将φi按顺序排成n×n 的矩阵, 该矩阵为结构的模态矩阵Φ=[φ1,φ2,...,φn]。 最终可以得到结构的模态柔度矩阵如下:

1.2 模态应变能理论
当结构系统发生损伤时,单元刚度的减弱会引起单元模态应变能在各个单元的重新分配,且模态应变能与结构的模态振型相关。 结构中无损单元的单元模态应变能变化较小,但是损伤单元的单元模态应变能将发生较明显的变化;通过对损伤前后的单元模态应变能进行对比,即可识别出结构损伤位置。 结构的第j 阶模态第i 个单元的模态应变能可表示为下式:

式(5)、(6)中:MSEij为单元模态应变能,h 和d分别代表结构健康和有损,φij为单元模态向量,[Ki]为整体坐标系下第i 个单元的刚度矩阵,T 为向量的转置符号。
取出第j 个振型中所有单元模态应变能变化率最大的单元模态应变能变化率,表示为式(7):

然后以每个单元的变化率和最大变化率的比值作为损伤识别的指标,该指标表示为:

式(8)中:m 为考虑的模态数。
1.3 改进的差分进化算法
标准的差分进化算法并没有在其程序中保持这种平衡,因为它只使用1 个仅在单方面表现良好的变异算子。具体来说:“rand/1 与rand/2”擅长全局搜索,局部搜索较弱;“best/1 与best/2”擅长局部搜索,在全局搜索中表现不佳。 因此,在本研究中,为了有效地均衡差分进化算法(DE)的全局与局部搜索能力,这4 种变异算子将被自适应地用于搜索过程中的变异阶段。 在每一代中,根据基于前一代中目标函数的最佳值和均值之间的绝对偏差(表示为delta)的自适应方案来选择这2 种变异方案。 随机选择生成概率分别为0.7 与0.3 的2 个变异算子“rand/1 与rand/2”中的1 个,用于探索包含全局最佳解的域。 经过多代全局搜索过程,当种群的多样性逐渐稳定且delta 较小时, 随机选择生成概率分别为0.7 与0.3 的2 个变异算子“best/1 与best/2”中的1 个来进行变异,利用该方法来加速算法的收敛速度。 改进的差分进化算法程序框图如图1 所示。其中,在搜索过程中,突变因子F 是在区间[0.4,1]中随机生成的,而不是原始差分进化算法(DE)中固定的值,目的是获得更多样的交叉结果。

图1 改进的差分进化算法程序框图
判断算法终止,本课题采用2 个控制参数。 其中公差(tolerance)是计算程序允许的误差阀值,Nmax为最大迭代数。 当某代种群的delta≤公差(tolerance)时,说明种群的多样性逐渐稳定,最佳值和均值之间的绝对偏差达到较小水平,计算结果达到较为精确的水平,则终止算法的运算并输出最佳值;但当算法达到最大迭代数时,delta>tolerance, 则强行终止算法,查找问题,并进行下一次的运算。 总的来说算法终止的条件是:delta≤tolerance 或达到最大迭代次数。 可以看出,阈值是根据公差来定义值的,且根据算法逻辑,阈值的值要大于公差的值。
阈值的选择在差分进化算法的运行中相当重要,将直接影响到改进的差分进化算法(IDE)的全局和局部的搜索能力。 如果阈值与公差值相比太大,则改进的差分进化算法(IDE)在全局搜索中具有优先性;因此,要为阈值设置适当的值,应该基于不同的问题特征进行选择。 公差取值为tolerance=10-6, 对于高度非线性和复杂的问题, 阈值取值较小,则有利于快速寻找最优解,其值可取为10-4或10-5;相反,对于小而简单的问题,阈值应设置较大值,其值可取为10-2或10-3。 本课题中,由于结构损伤问题复杂,故采用阀值10-4进行运算。 结果发现该方法能够有效地平衡搜索和进化的能力。
2 实验验证
实验验证部分以包含2 根损伤均质金属梁和包含4 根损伤钢筋混凝土梁的6 个实验对照组为实验对象。 采用锤击激励的方式进行振动模态提取试验,实验装配示意如图2 所示。

图2 实验数据采集系统示意图
实验采集系统与其他设备如图3、4 所示。 为了消除环境温度对所测应变信号的影响,对各个传感器设置温度补偿片。

图3 实验采集系统设备图
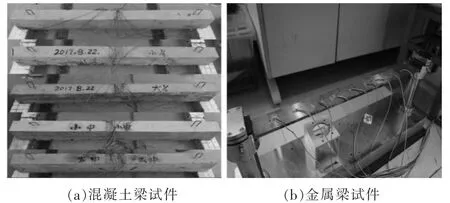
图4 实验采集系统构件图
为验证2 种识别方法的有效性,损伤工况设置为单损伤情况下的损伤识别。 采用人工切割的方法对金属梁不同位置设置损伤,均质金属梁损伤单元切割尺寸为b×h×l=50 mm×2 mm×2 mm; 开槽的位置分别为5# 中部和8# 单元中部,然后对每根梁进行多次振动测试,防止出现测试误差。 钢筋混凝土梁设置2 种损伤程度,每种损伤程度分别设置在梁的2 个损伤位置,损伤程度分别为b×h×l=120 mm×80 mm×100 mm 与b×h×l=120 mm×80 mm×200 mm。损伤位置分别设置在5#和8#单元,如表1 所示。

表1 简支梁损伤工况情况
将实验所得的实验梁模态参数信息导入MATLAB 中,利用模态应变能法(MSECR)对均质金属量以及钢筋混凝土梁的模态参数进行处理,识别效果如图5 所示。由识别结果中可以明显看出,6 种工况下,损伤位置处的MSECR 指标均更为突出,但由于测量误差的影响,同样也会存在一定的误判项。 对比工况3 与工况4,发现相同位置损伤的情况下损伤程度越高,识别效果越好。 总体来说,该方法对均质金属梁和钢筋混凝土梁损伤位置的识别是有效的。

图5 工况1~工况6 的模态应变能MSECR 指数
将表2、3 中的振型信息作为目标函数的一部分导入MATLAB,然后利用改进的差分进化算法的损伤识别方法分别对均质金属实验梁的2 种损伤工况以及钢筋混凝土实验简支梁的4 种损伤工况进行损伤识别。 该方法的识别结果如图6 所示。

表2 均质金属梁各工况下竖向前3 阶频率

表3 钢筋混凝土梁工况3~工况6 前3 阶频率
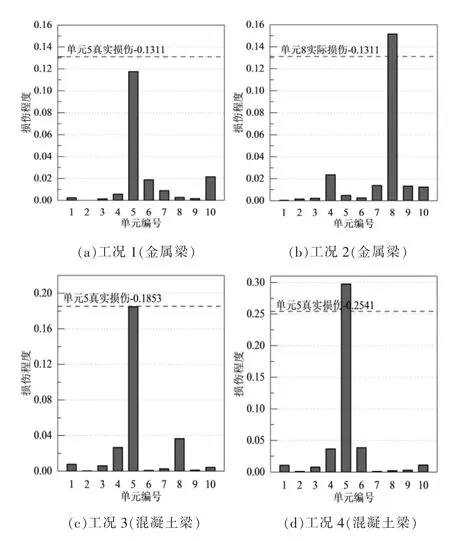
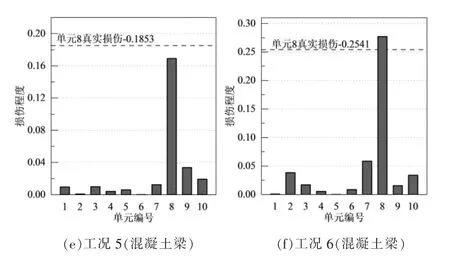
图6 实验梁(IDE)损伤识别结果
从损伤识别结果(图6)来看,改进的差分进化算法对均质金属梁和混凝土梁的损伤识别都有较好的识别效果。对于均质金属梁工况1、工况2,2 种情况下的损伤程度相同,损伤识别最大误差位于工况1 的第10 单元,最大识别误差为2.15%,可见该方法的识别效果良好。在钢筋混凝土梁损伤工况3~工况6 中,该方法能清楚地识别出各个损伤工况的损伤位置,损伤程度识别最大误差位于工况6 的第7 单元,最大识别误差为5.83%。
3 结论
(1)推导了模态应变能法和模态柔度的计算公式;提出了差分进化算法(DE)在交叉和选择阶段的改进方案,并给出了相应的算法,为后续损伤识别提供依据;(2)采用均质金属梁与钢筋混凝土简支梁的动测实验验证模态应变能法(MSECR)和改进的差分进化算法(IDE)的识别精度;对于均质金属梁与混凝土梁,模态应变能法(MSECR)可较准确地识别出损伤位置;改进的差分进化算法(IDE)进行损伤定位和定量分析时也有较好的识别效果。
猜你喜欢
数学杂志(2022年5期)2022-12-02
成都信息工程大学学报(2022年4期)2022-11-18
湘潭大学自然科学学报(2022年2期)2022-07-28
现代食品(2022年11期)2022-07-18
昆明医科大学学报(2022年3期)2022-04-19
新世纪智能(数学备考)(2021年5期)2021-07-28
上海理工大学学报(2021年3期)2021-07-20
中国传媒大学学报(自然科学版)(2021年1期)2021-06-09
太空探索(2014年1期)2014-07-10
电影新作(2014年1期)2014-02-27
