
基于RFID和机器学习的室内固定资产定位方法
2022-07-08 01:01方潜生黄晶王萍张振亚李善寿
广西科技大学学报 2022年3期
方潜生 黄晶 王萍 张振亚 李善寿






摘 要:针对传统室内固定资产定位方法存在定位时间长、定位误差较大以及定位成本高等问题,提出一种基于射频识别技术和机器学习的室内固定资产定位方法。首先,构建基于长短记忆神经网络的固定资产感知识别模型,完成对固定资产设备的区域级识别粗定位,实现对某个区域内固定资产设备数量的自动清点;其次,面向粗定位结果在区域内的固定资产设备,设计基于粒子群优化反向传播神经网络的定位模型,实现对固定资产设备的精准定位;最后,在高校实验室环境下开展了实测实验。实验结果表明,该方法对室内固定资产的识别F1值可达0.98,平均定位误差约0.5 m,满足建筑智能中对室内固定资产的管理要求,具有资产管理成本低、定位精度高、抗干扰能力强等特点。
关键词:射频识别;机器学习;长短期记忆神经网络;粒子群优化;前馈神经网络;定位识别
中图分类号:TP391.44;TP181 DOI:10.16375/j.cnki.cn45-1395/t.2022.03.007
0 引言
加强企事业单位固定资产管理(含自动清点及实时跟踪与定位),对于保证固定资产安全、提高经济效益具有重要意义。目前,对企事业单位固定资产的管理大多采用传统手段,如手工记录、条码、二维码等,存在效率低下、准确性差、无法实时查询资产状态等问题,如何对室内固定资产实现实时、精准的定位成为目前资产管理领域亟待解决的问题。国内外针对室内定位的研究包括GPS、WiFi(wireless fidelity)、蓝牙(bluetooth,BLE)和射频识别(radio frequency identification,RFID)[1-3]等,其中,RFID技术具有成本低、非接触式、延迟时间短等优势,使得RFID技术成为定位领域的研究热点。
在国内,徐杨杰等[4]提出一种基于牛顿插值和差分进化改进灰狼优化支持向量回归机的定位算法,该算法能减少布置参考标签的工作量;周字辉等[5]提出一种基于计算机视觉的室内定位系统,通过目标检测算法检测出特定物体并获取其图像坐标;杨敏等[6]利用人员行走过程中几何位置连续的先验信息实现室内WiFi定位的方法,相较于传统的无先验信息与KNN算法的方法,其精度得到提高;杨艳芳等[7]通過实验实测分析通信距离与接收信号强度指示(received signal strength indicator,RSSI)之间的映射关系,提出一种动态的路径损耗参数测距方法,可用于无线传感器网络的节点定位。赖朝安等[8]提出一种基于高斯过程回归和WiFi指纹的室内定位方法,离线阶段使用GPR扩展指纹库,在线阶段分别使用加权最近邻法(WKNN)、最大似然估计算法(MLE)、多层神经网络(MLP)对待测点进行定位,结果表明,GPR-WKNN算法的定位精度最高。Alvin等[9]提出使用BLE指纹识别和PDR的方法来提高室内定位系统的准确性。Keong等[10]提出基于RFID和ZigBee集成的室内定位系统。印度科学研究所在智能工厂中使用无源RFID系统定位金属部件,在3.6 m×3.6 m的区域内,位置估计准确率为89%[11]。Afuosi等[12]设计了一种在智能手机上嵌入WiFi的指纹定位系统,仿真结果表明,该方法将小于2 m的误差提高了40%,且所提算法在计算复杂度方面与其他算法相当。Guo等[13]利用CC2530芯片构建ZigBee无线传感器网络,配合加权KNN算法构建二维定位模型,其二维定位的标准偏差为1.15 m。
上述研究通常依赖于大量硬件设施,成本高昂,且存在定位精度低和定位速度慢等缺陷。针对这些缺陷,本文提出一种基于RFID和机器学习的室内固定资产定位方法。
1 基于RFID和机器学习的室内固定资产定位模型
1.1 系统概述
为实现对室内固定资产的实时精准定位,方便管理人员对固定资产进行快速盘点及智慧管理,将RFID标签贴附在固定资产上,作为该固定资产的唯一身份证件。使用多个RFID信标接收RFID主动标签发射出来的信号强度,RFID信标通过射频通信将信号强度值传输到基站,基站经无线局域网把所有采集到的信号传输给本地计算机,经感知识别模块和定位模块完成对固定资产的定位估计。系统框架图如图1所示。
感知识别模块是基于RSSI值,使用长短期记忆神经网络(LSTM)对RFID信标感知到的固定资产进行房间级别(也称区域级别,zone-level)的定位及计数;定位识别模块主要面向辨识为区域内的固定资产,使用粒子群优化的反向神经网络(PSO-BP)对其进行具体位置估计,实现定位功能。
1.2 RFID信号采集及预处理
通过部署在建筑空间内的RFID感知识别装置采集RFID信号,装置硬件包括RFID有源标签、RFID信标、定位基站和本地计算机。RFID信标集成RFID标签读写器和数据中继功能,用于接收2.4 G有源RFID标签的相关数据,并通过433 M无线将数据发送给定位基站,定位基站通过TCP协议与本地计算机通信,将所有数据转发至本地计算机。本地计算机接收到的数据为16进制的数据帧,根据数据帧格式进行解析,解析后得到信标MAC地址、有源RFID标签ID、RSSI值等信息。
采集到的原始数据,需要经过两步预处理。
Step 1 降噪处理。由于RSSI值服从式(1)所示的高斯分布,使用高斯滤波进行预处理可在一定程度上消除干扰影响较大的RSSI值。
[F(r)=1σ2πe(r-μ)22σ2] . (1)
式中:[σ2]为方差,[μ]为期望值,[r]为RSSI值。根据高斯滤波去噪规则,先求出所有RSSI值的均值和标准差,然后将RSSI值与平均值的绝对值之差大于2倍标准差的RSSI值去除。
Step 2 為得到便于BP神经网络处理的数据,需要对RFID信号进行归一化处理。由于RFID信号值的变化范围为-100~0 dBm,使用转换公式(2)将原始的RSSI值归一化至(0, 1)。
[r=r+1]. (2)
式中:[r]表示某个时间T的RSSI均值。
1.3 基于LSTM的感知识别模型构建
基于1.2所述的RSSI信号预处理,为方便构建基于LSTM的感知识别模型,首先给出如下相关信号说明。
在建筑空间内部署[n]个RFID信标,设置一个时间窗口[T],在[T]时间内,第[i]个RFID信标感知到同一个RFID标签的RSSI值按照到达时间的先后构成序列[Ri],如式(3)所示:
[Ri=(r1, r2, …, rt, …, rk)] . (3)
式中:[Ri]表示一个由RSSI值组成的向量;[rt]表示在第[t]个时刻的RSSI值;在一段时间内,不同RFID信标对同一RFID标签能够感知到的RSSI值的数量不同,即不同[Ri]中[k]的大小不同。
在[T]时间内,RFID标签的位置状态预测结果如式(4)所示:
[L=f1(Ri)] . (4)
式中:[L]表示RFID标签所在位置的标识。当[Ri]对应的RFID标签在室内时,[L]取值为1,当[Ri]对应的RFID标签在室外时,[L]取值为0;[f1]表示RFID信号序列与位置状态拟合的关系函数,使用能够处理不同输入维度的LSTM神经网络来学习RFID信号序列,以降低RFID信号受环境影响出现的抖动性与不连续性。
若第一步辨识结果[L=1]时,则进行下一步的位置坐标估计。在T时间内,若同一RFID信标多次感知到同一RFID标签,即[Ri=(r1, r2, …, rt, …, rk)]中[k>1],则将多个RSSI值求平均值来代表该RFID标签的RSSI值,如式(5)所示:
[R'i=(r1+r2+…+rk)/k] . (5)
对于同一个RFID标签,将同一时间内不同RFID信标探测到的RSSI值构成一个向量[R],如 式(6):
[R=(R'1, R'2, …, R'i, …, R'k)] . (6)
其中:[R'i]是第[i]个RFID信标感知到该RFID标签的RSSI值的均值。由于单个RFID信标的感知范围有限,无法感知到距离偏远的RFID标签的信号,因此,[k≤n]。
RFID标签的位置坐标的预测结果如式(7)所示:
[(coordinateX, coordinateY)=F(R)] . (7)
式中:[coordinateX]表示RFID标签所在位置的[x]轴坐标,[coordinateY]表示RFID标签所在位置的[y]轴坐标,[F(R)]表示多信标RFID信号与位置坐标拟合的关系函数。
选择单个RFID信标感知到的信号序列[Ri]作为位置感知模型的输入,其对应的位置标识[L]作为模型的输出,使用LSTM神经网络对RFID位置感知模型进行训练。LSTM神经网络是循环神经网络(RNN)的特殊形式,引入“细胞记忆”的概念,利用门控制实现长期记忆与短期记忆的结合。每个LSTM单元包括遗忘门、输入门和输出门3种门结构。图2为[t]时刻的LSTM单元结构图,输入为当前时刻的输入[rt]以及上一时刻的输出[ht-1],[Ct-1]为上一时刻的单元状态[14]。
通过遗忘门来决定前一时刻的单元状态[Ct-1]有多少保留到当前时刻的单元状态,如式(8)所示:
[Ft=sigmoid(wf⋅ht-1, xt+bf)] . (8)
输入门决定当前时刻的网络输入[rt]有多少能加入到当前时刻的单元状态[Ct],如式(9)所示:
[Nt=sigmoid(wi⋅ht-1, xt+bi)×]
[tanh(wc⋅ht-1, xt+bc)]. (9)
更新单元状态由[Ct-1]转向[Ct],如式(10)所示:
[Ct=Ft×Ct-1+Nt] . (10)
输出门输出结果,如式(11)所示:
[ht=tanh(Ct)×sigmoid(wo⋅ht-1, xt+bo)] . (11)
其学习过程如图3所示。首先初始化网络中各门结构的权重和偏置,再初始化迭代次数以及隐层神经元数目;然后按照式(8)—式(11)进行前向传播,计算各层的输出;反向传播,计算各层的误差;根据误差更新权重和偏置,直至达到最大迭代次数。
1.4 基于PSO-BP的定位模型构建
向量[R]作为RFID位置辨识模型的输入,其对应的位置坐标[(coordinateX, coordinateY)]作为模型的输出,选用BP神经网络对RFID位置辨识模型进行训练[15]。BP神经网络结构如图4所示。
<G:\202203\图片\7方潜生\方潜生图4.tif>
d1、d2、…、dn为第1个、第2个、…、第n个RFID信标接收的RSSI值。
由图4可知,BP神经网络的输入层是RFID信标感知的RSSI值,输出层是位置辨识结果。对于该神经网络结构,其中隐含层神经元的激活函数如式(12)所示,输出层神经元的激活函数如式(13) 所示。
[f(x)=tansig(x)=21+e-2x-1], (12)
[f(x)=purline(x)=x] . (13)
模型训练过程中,传统BP神经网络收敛速度慢,容易陷入局部最优的情况。PSO算法具有自组织、进化、全局搜索能力强的特点,可以通过PSO算法来优化BP神经网络内部的权重与阈值[16]。对于PSO算法中每个粒子,由式(14)更新粒子的速度,由式(15)更新粒子的位置[17]。
[v(t+1)=ω×v(t)+c1×rand()×(pbest-x(t))+]
[c2×rand()×(gbest-x(t))], (14)
[x(t+1)=x(t)+v(t+1)]. (15)
设[t]时刻位置在[x(t)] 、速度为[v(t)]的粒子,在[t+1]时刻,其位置[x(t+1)]与速度[v(t+1)]按照式(14)、式(15)规定的策略更新。式(14)中,[ω]是惯性因子,[c1]、[c2]是学习因子,[rand()]是(0,1)的随机数,pbest是粒子的历史最优位置,而gbest为全部粒子的历史最优位置。
基于PSO-BP的RFID定位模型学习流程如图5所示。
由图5可知,PSO优化的BP神经网络构建RFID定位模型的流程是:首先,依据图4所示的BP神经网络结构,初始化输入层、隐含层和输出层的神经元个数以及各层之间的权重和阈值。再初始化粒子的位置、速度以及历史最优位置,计算每个粒子最优位置,根据式(14)、式(15)更新粒子速度和位置,依据适应度函数计算位置更新后粒子的适应度值,若更新后的适应度值比历史最优适应度更小,将粒子历史最优位置设置为粒子当前的位置,直到达到最大迭代次数,得到BP神经网络最优的权重与阈值。
由于单个RFID信标感知范围有限,在某一时刻,可能无法感知到某一个RFID标签的RSSI值,所以[n]个RFID信标在某一段时间感知到的向量[R'i]的长度不一,导致BP神经网络的输入不同。根据n个RFID信标对应的2n-1种组合方式,数据集可分为2n-1种情况,根据不同的输入数据,需要训练2n-1个模型,将不同RFID信标感知到的向量[R]输入对应的定位模型。
2 实验验证与性能分析
2.1 实验环境与实验配置
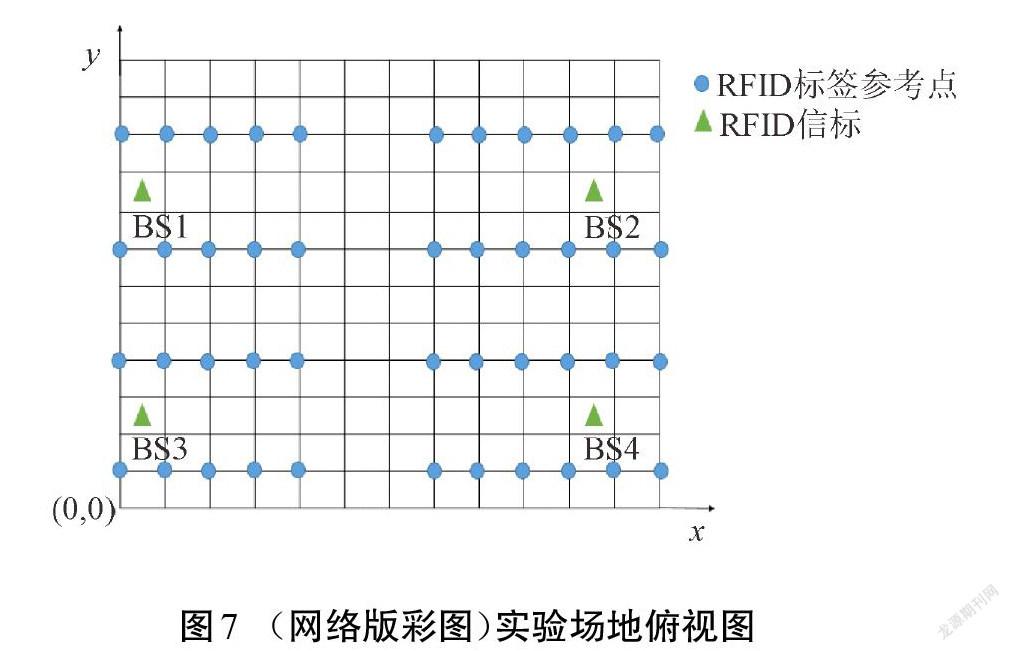
在某高校實验室开展实测实验,室内区域有办公设备等物品,且人员流动性大。实验场景如图6所示,其中虚线区域为定位区域,面积约为6 m × 6 m。将实验空间俯视图左下角标记为坐标原点,如图7所示。RFID感知识别装置所需设备包括4个RFID信标、1个定位基站和1台计算机,RFID信标的布设位置如图7中绿色三角形标记所示,对不同位置的RFID信标进行标号,分别为1号、2号、3号和4号。4个RFID信标均放置在同一水平面的货架上,距离地面1.8 m。在房间内布设44个标记点,每个参考点布设方式如图7中的蓝色圆圈标记所示。然后在每个参考点处分别采集4个RFID信标接收到的参考标签的RSSI值,记录参考点的坐标及其对应的RSSI值。
本实验使用的实验器材(除计算机外)全部为上海网频电子科技有限公司的货架产品,其中,RFID信标型号为NR-XBRD-03AB,RFID有源标签型号为NR-TGXK-10,定位基站型号为NR-RDM60B-11。图8(a)为RFID信标的实物图,图8(b)为定位基站实物图,图8(c)为RFID有源标签。计算服务器选用联想T420,CPU为:Inter(R) Core(TM) i5-2450M CPU @ 2.50 GHz,内存为12 GB,搭载Windows10的系统。图8(d)为定位服务器。
RFID信标无需任何配置,通电即可工作,其工作电压范围为5~12 V。定位基站需要根据服务器的网段修改本地IP地址和远程IP地址,将定位基站的IP地址和服务器配置于同一个网段下,远程IP地址设置为服务器IP地址,远程端口号在出厂时已经配置为8234,无需修改。
在本实验中,使用4个RFID信标,对应24-1种组合方式,数据集可分为15种情况,标记为data 1、data 2、data 3、…、data 15,具体数据集名称和样本数量如表1所示。
如表1所示,一共采集了45 007条样本。将采集的样本按照不同RFID信标的组合方法分别划分成15个样本集。对于每个样本集,其中20%作为测试集用于模型性能的测试,80%作为训练集进行模型的训练。
LSTM神经网络参数配置如表2所示。
由于序列[Ri]的维度为1,故LSTM神经网络的输入维度为1。输出层输出位置标识L,故输出维度也为1。隐含层节点数设置为100,训练批次量设为27,优化器使用adam,分类器选用softmax。
BP神经网络参数配置如表3所示。
对于BP神经网络,其输入层节点数为RFID信标的个数,例如样本集data 15,输入层节点数为4。输出层节点数为2,即二维坐标,隐含层设置为1层,其节点数为6,损失函数为mean squared error。
PSO算法参数配置如表4所示。
为评估RFID感知模型性能,选用[F1]值作为评估标准。式(16)为[F1]值的计算公式,其中P为精确率,R为召回率。
[F1=2PRP+R] . (16)
为评估RFID定位模型性能,选用定位误差和平均定位误差作为评估标准。本文构建的RFID定位模型预测得到的待定位坐标为[(x'i, y'i)],其对应的真实坐标为[(xi, yi)]。距离误差(distance error,DE)和平均距离误差(mean distance error,MDE)的计算公式如式(17)、式(18)所示。
[D=(xi-x'i)2+(yi-y'i)2], (17)
[M=i=1n(xi-x'i)2+(yi-y'i)2/n] . (18)
式中:[D]为DE值,[M]为MDE值。
2.2 实验结果与分析
2.2.1 基于LSTM的RFID感知模型性能
为验证基于LSTM的RFID感知模型的性能,选用1号RFID信标感知的数据作为训练和测试模型的数据集。为保证数据可靠,利用训练集进行100次学习,在这100次学习的模型下,测试集辨识结果的[F1]值的分布如图9所示。
图9展示了测试集在RFID感知模型下辨识结果的[F1]值分布直方图,横坐标为[F1]值,纵坐标为对应范围[F1]值出现的次数。从图中可以看出,分布在(0.99,1]内的[F1]值出现的次数最多。由统计结果可知,在100次实验中,[F1]值最大可达0.998 9,最小为0.898 0,平均值为0.985 3,标准差为0.015 0,验证了基于LSTM的RFID感知模型的有效性。
2.2.2 基于PSO-BP的RFID定位模型性能
为验证基于PSO-BP的RFID定位模型的性能,从表2中的数据集中抽取80%作为训练集来训练RFID定位模型,抽取20%作为测试集用于模型性能的测试。统计每个测试集的平均距离误差、距离误差最小值、距离误差最大值以及模型训练的耗时,统计结果如表5所示。
由表5可知,平均距离误差最小的是data 13训练得到的模型,其输入数据是1号、3号和4号RFID信标感知到的RSSI值。所有距离误差中,最小值为9.698 3×10-4 m,对应的数据集是data 8,其输入数据由2号和3号RFID信标感知到的RSSI值组成。在本文实验场景中,综合15个RFID定位模型的平均定位距离误差为0.512 8 m。
2.2.3 PSO-BP算法与BP算法性能对比
将本文所提PSO-BP算法與BP算法在相同配置环境下对15个训练集进行学习,每个训练集下的平均距离误差对比如图10所示。其中,BP神经网络的隐含层神经元数据设置为6,学习率[η]设置为0.001,迭代次数为1 000次。
由图10可以观察到,在15个RFID定位模型中,使用本文定位算法训练得到的定位模型比未优化的BP神经网络算法的表现更加优异。
将综合模型的测试结果进行误差累计分布对比,对比图如图11所示。
由图11中的数据曲线可知,当距离误差为0.62 m时,PSO-BP算法的距离误差比率约为70%,比BP算法的距离误差比率高32%左右,且PSO-BP算法的收敛速度更快,距离误差在1.39 m左右的比率达到了90%。与BP算法相比,本文所提的PSO-BP算法对RFID定位模型训练的影响更大。
2.2.4 与经典定位算法对比
利用RFID标签进行室内定位,主要通过接受信号强度、测量信号的收发时间和相位等信息,然后利用特定的算法估计出待定位标签的位置。其中,根据RSSI值进行RFID定位的方式应用最为广泛。常用的基于RSSI的RFID室内定位算法包括临近探测法、三边测量法、指纹定位法。在上述实验场景中随机选取4个不同位置的待定位RFID标签,如图12所示。
分别选用本文定位算法、临近探测法、三边测量法以及指纹定位法计算出A、B、C、D 4个点的坐标,实验结果如表6所示。
分别计算这4种定位算法在4个待定位点的定位误差,如图13所示。
由实验结果可知,本文定位算法的平均定位误差最小,精度高于其他经典定位算法。
衡量一个定位算法的优劣不仅要观察其定位精度,还需要考虑其定位成本,例如定位的时间、复杂度等因素。表7列出了4种定位方法的对比。
由表7可知,临近探测法对RFID标签的定位粗略,适用于对定位精度要求不高的定位场景。三边测量法在本文实验环境中定位精度较低,主要原因是受实际室内环境的多径传输干扰。本文定位算法和指纹定位法的定位精度相对高一些,但前期采集数据以及离线训练阶段比较繁琐,且定位精度受参考标签密度的影响较大。由于指纹定位法在在线定位阶段对比指纹数据库的工作量巨大,所以相对其他定位方法,其定位速度较慢。为平衡定位精度与定位速度2个指标,选用本文定位算法作为定位方法具有一定的优越性。
2.2.5 与商用RFID定位产品对比
随着物联网技术的兴起, RFID定位系统如雨后春笋般在市场上涌现,并广泛应用于企业、工业、机器人等领域,可对人员、物资、车辆进行实时精准定位,帮助企业解决远程监控、风险管理、存货物资管理等行业痛点。经过调研,选择市场上4个商用RFID定位产品与本文定位系统进行性能对比,如表8所示。
如表8所示,深圳市铨顺宏科技有限公司生产的仓储管理系统的货物定位精度可达0.5 m,其仅使用RFID作为物品身份标识技术,使用超宽带技术采集货物位置信息。使用超宽带信号的抗多径效应能力更强,但定位技术复杂性较高。苏州新导智能科技有限公司、上海优翊信息技术有限公司、内布拉斯加大学和上海网频电子科技有限公司生产的实时定位系统的定位精度较低,前三家公司的定位精度能达到1.0 m内,后一家公司的定位精度只能达到5.0 m内,但涉及的定位算法简单,可对定位系统进行二次开发,提供定位精度。综上对比,本文所提的RFID实时定位方法算法复杂度低,且能提供较好的定位精度。
3 结论与展望
本文设计并实现了一种基于RFID和机器学习的室内固定资产定位方法。该方法采用LSTM神经网络来处理RFID信号序列,有效解决室内复杂多径环境下RFID信号在时间尺度上存在的抖动性和不连续性,克服传统RFID感知模型对环境的依赖性;利用PSO算法优化BP神经网络,不仅收敛速度快,且不易陷入局部最优,较好地降低RFID信号间歇性对RFID定位模型的影响;在建筑空间部署多个RFID信标,使用不同RFID信标组合方法构建多个定位模型,提高了定位模型的鲁棒性。实测实验结果表明,固定资产位置状态的区域级感知识别结果F1值可达0.985 3,定位精度约0.5 m,且相比传统指纹定位法,能有效提高定位速度,满足在室内空间中快速寻找所需固定资产的需求。与市面上商用RFID定位产品对比,本文方法在定位精度和算法复杂度方面均体现一定的优越性。本文研究中,RFID信标的数量和部署位置尚未优化,模型的迁移性也未讨论,未来将对这些工作开展进一步研究。
参考文献
[1] PU Y C,YOU P C. Indoor positioning system based on BLE location fingerprinting with classification approach[J].Applied Mathematical Modelling,2018,62:654-663.
[2] MENESES F,MOREIRA A,COSTA A,et al.4-radio maps for fingerprinting in indoor positioning[M].CONESA J,PÉREZ-NAVARRO A,TORRES-SOS-PEDRA J,et al. Geographical and fingerprinting data to create systems for indoor positioning and indoor/outdoor navigation. New York:Academic Press,2019,69-95.
[3] WANG C Z,WU F,SHI Z C,et al. Indoor positioning technique by combining RFID and particle swarm optimization-based back propagation neural network[J].Optik,2016,127(17):6839-6849.
[4] 徐杨杰,王艳,严大虎,等.基于Newton插值与混合灰狼优化SVR的RFID定位算法[J].系统仿真学报,2017,29(9):1921-1929.
[5] 周字辉,朱晓强,曾丹.基于计算机视觉的室内定位系统设计与实现[J].电子测量技术,2022,45(2):43-47.
[6] 杨敏,刘思怡.一种基于先验信息的WiFi室内定位方法[J].电子测量与仪器学报,2020,34(6):163-168.
[7] 楊艳芳,王伟,王召巴.基于WSN室内定位的路径损耗模型参数算法研究[J].电子测量技术,2021,44(13):54-58.
[8] 赖朝安,龙漂.基于高斯过程回归和WiFi指纹的室内定位方法[J].电子测量与仪器学报,2021,35(2):186-193.
[9] ALVIN R,GEDE P K. Indoor positioning system using hybrid method of fingerprinting and pedestrian dead reckoning[J]. Journal of King Saud University-Computer and Information Sciences,2021:1319-1578.
[10] KEONG N Y,CHIEH K S,BURHAN M F,et al.RFID and ZigBee integrated environment for indoor localization[C]//2014 4th International Conference on Engineering Technology and Technopreneuship(ICE2T),2014:213-217.
[11] GHADGE K,ACHAR T,BHATT A,et al. Indoor positioning of metal parts by fingerprinting using passive RFID[J]. Procedia CIRP, 2020,88:60-63.
[12] AFUOSI M B,ZOGHI M R.Indoor positioning based on improved weighted KNN for energy management in smart buildings[J].Energy and Buildings,2020,212(1):109754.
[13] GUO H,LI H X,XIONG J,et al.Indoor positioning system based on particle swarm optimization algorithm[J]. Measurement,2018,134:908-913.
[14] 秦胜君,李婷.一种基于长短记忆模型的交通轨迹异常挖掘模型[J].广西科技大学学报,2021,32(2):58-64.
[15] 卢顺,李英顺.基于差分进化算法优化BP神经网络的镍镉电池寿命预测[J].广西科技大学学报,2020,31(2):93-98.
[16] 艾永冠,朱卫东,闫冬.基于PSO-BP神经网络的股市预测模型[J].计算机应用,2008,28(S2):105-108.
[17] 于军琪,井文强,赵安军,等.基于改进PSO-BP算法的冷负荷预测模型[J].系统仿真学报,2021,33(1):54-61.
[18] BRCHAN J L,ZHAO L L,WU J Q,et al. A real-time RFID localization experiment using propagation models[C]//IEEE International Conference on RFID.IEEE,2012:141-148.
Indoor fixed assets localization method based on RFID and
machine learning
FANG Qiansheng1,2, HUANG Jing1,2, WANG Ping*1,2, ZHANG Zhenya1,2, LI Shanshou1,2
(1. Anhui Province Key Laboratory of Intelligent Building and Building Energy Saving, Hefei 230022, China;
2. Department of Electronic and Information Engineering, Anhui Jianzhu University, Hefei 230601, China)
Abstract: An indoor fixed asset location method based on radio frequency identification technology and machine learning is proposed to deal with the shortcomings of long computing time, large localization error and high cost in traditional indoor fixed asset location methods. Firstly, a perception and recognition model based on long and short term memory neural network is constructed to achieve the rough zone-level localization of fixed asset equipment, which can realize automatic inventory of the number of fixed asset and equipment in a certain area of interest. Secondly, for the fixed asset equipment which have been determined inside the given area through the perception and recognition model, the back propagation neural network based on particle swarm optimization is used to estimate the precise location. Finally, the extensive experiments have been carried out in an university laboratory environment. The results show that the F1 value of the proposed LSTM-based recognition model for indoor fixed asset can reach 0.98, and the average localization error is about 0.5 meter, which can meet the requirements of indoor fixed asset management for intelligent building, and has the characteristics of low asset management cost, high positioning accuracy, and strong anti-interference ability.
Key words: radio frequency identification; machine learning; long and short term memory neural network; particle swarm optimization; back propagation; location recognition
(責任编辑:黎 娅)
猜你喜欢
现代电子技术(2016年23期)2017-01-12
电子技术与软件工程(2016年22期)2016-12-26
科技创新与应用(2016年34期)2016-12-23
时代金融(2016年27期)2016-11-25
科教导刊(2016年26期)2016-11-15
科学与财富(2016年28期)2016-10-14
科教导刊·电子版(2016年10期)2016-06-02
科教导刊·电子版(2016年6期)2016-04-19
