大阵面天线折叠机构的横展同步控制系统
2022-07-11 09:08郭亚奎吴影生余澍民
西华大学学报(自然科学版) 2022年4期
郭亚奎,吴影生,余澍民
(中国电子科技集团公司第38研究所,安徽合肥 230031)
雷达的机动性能对雷达的快速反应能力和战场生存能力有决定性影响。随着现代战争需求,地面军用雷达天线阵面越来越大,需要雷达在公路、铁路和空运中不拆分、不吊装,可快速高效远程投送[1]。本文针对一种新颖的高压缩比横展结构的大阵面天线折叠机构,设计了横展同步控制系统,解决了低频段大口径雷达天线快速架撤和高机动运输难题,可满足机动部署需求,提高战场生存能力[2]。该横展机构设计同步控制系统,能确保横展运动过程中天线列骨架不因形变损坏其内部元器件。
1 边块横展机构
天线阵面骨架由左边块、右边块和中块骨架组成,如图1所示。雷达天线工作状态尺寸为11900 mm ×8150 mm(长×宽),天线质量为16 t。边块可通过横展伸缩和翻转折叠实现天线快速架撤状态的转换。
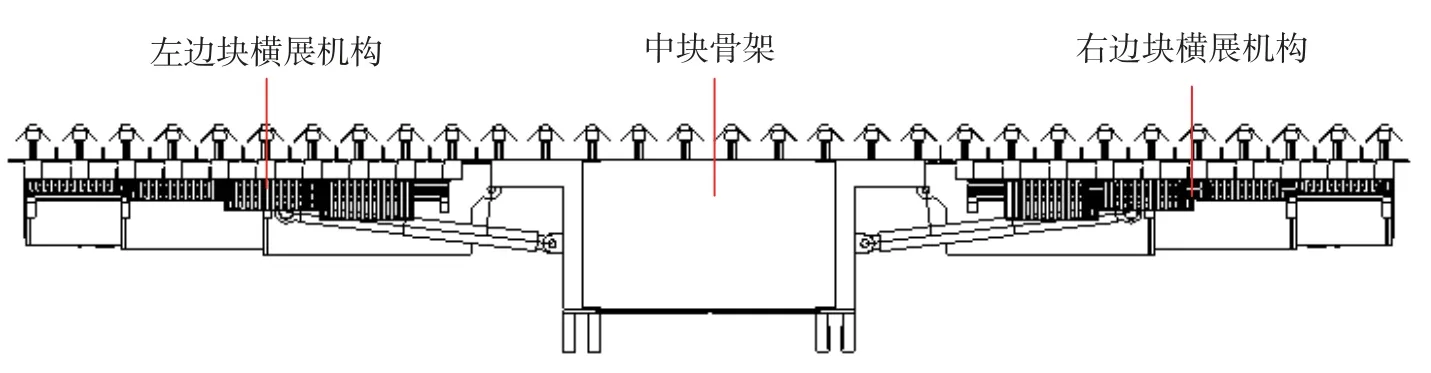
图1 阵面骨架机构示意图
单个边块骨架包含11根列骨架、可自动折叠的反射网、定位拉杆以及3组横展驱动机构。每组横展驱动机构由3节臂组成。展开过程中液压油由横展油缸的活塞杆端进油口进入油缸腔体,随着活塞杆端的伸长,驱动第二节臂展开,滑轮组固定于横展油缸的缸体端部,钢丝绳绕过滑轮组一段固定在第一节臂上,另一端固定在第三节臂上。缸体向前移动过程中,滑轮组也随之向右移动,通过钢丝绳组,带动第三节臂同步展开,如图2所示。边块骨架展开和收拢宽度分别为2900 mm和1360 mm,实现大于2倍的展收比。油缸两端安装了磁致伸缩位移传感器,实时反馈每根油缸位移量。边块骨架在展开过程中要确保两侧6个横展油缸精准动态同步,控制精度要求为3 mm以内,才能避免边块列骨架形变而损坏内部电子器件。针对该阵面具有大跨距、大承载、高精度等特殊需求,边块横展机构的伺服控制采用电液伺服系统,它具有大质量比、响应速度快和控制精度高等优点,且经过试验论证,其能满足边块横展机构的精准控制需求。
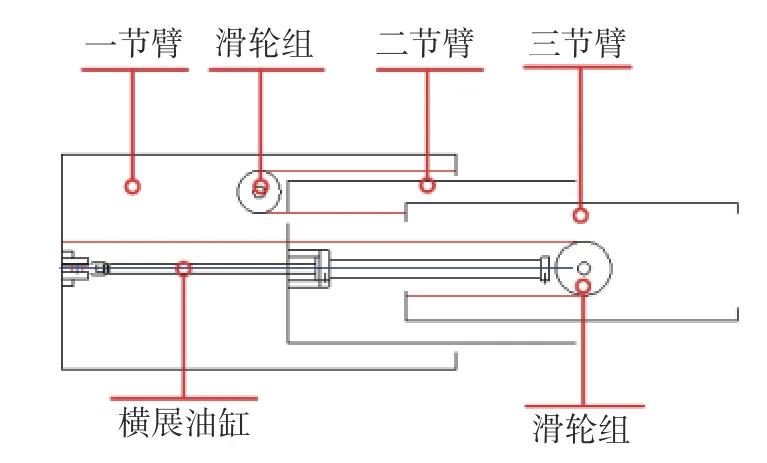
图2 横展同步伸缩原理
2 控制系统设计
控制核心采用功能强大、接口丰富的贝加莱可编程计算机控制器X20CP3586。通过RJ45端口与工控触摸屏传输指令和显示状态;通过扩展模块DO9322控制压力阀;通过AO4622及放大器处理模拟量信号,调控横展油缸运动方向和速度;通过扩展模块AI4622采集磁致伸缩位移传感器反馈信息,如图3所示。基于控制器强大的数据处理能力,采样控制周期仅为5 ms,为能精准控制6组油缸同步伸缩提供有力保障。

图3 横展同步控制工作原理图
横展机构液压系统原理如图4所示。执行横展动作时,启动液压泵组1.8,通过预设的溢流阀1.9,使系统压力达到设定值,压力表1.10显示压力值,油液通过单向阀1.11、高压过滤器1.12进入阀组。此时,压力油可通过比例换向阀2.2、平衡阀2.3,到达油缸2.4,实现油缸的动作:通过比例换向阀2.2的换向动作,实现油缸2.4的伸出和缩回动作切换;通过控制比例换向阀的开度,实现油液流量精准控制。每条油缸两端均安装磁致伸缩位移传感器2.5,伺服系统对横展机构液压缸进行PI同步算法控制,实现6个横展油缸精准同步。横展动作完成后关闭泵站,平衡阀在弹簧力的作用下自动将液压油缸锁止。
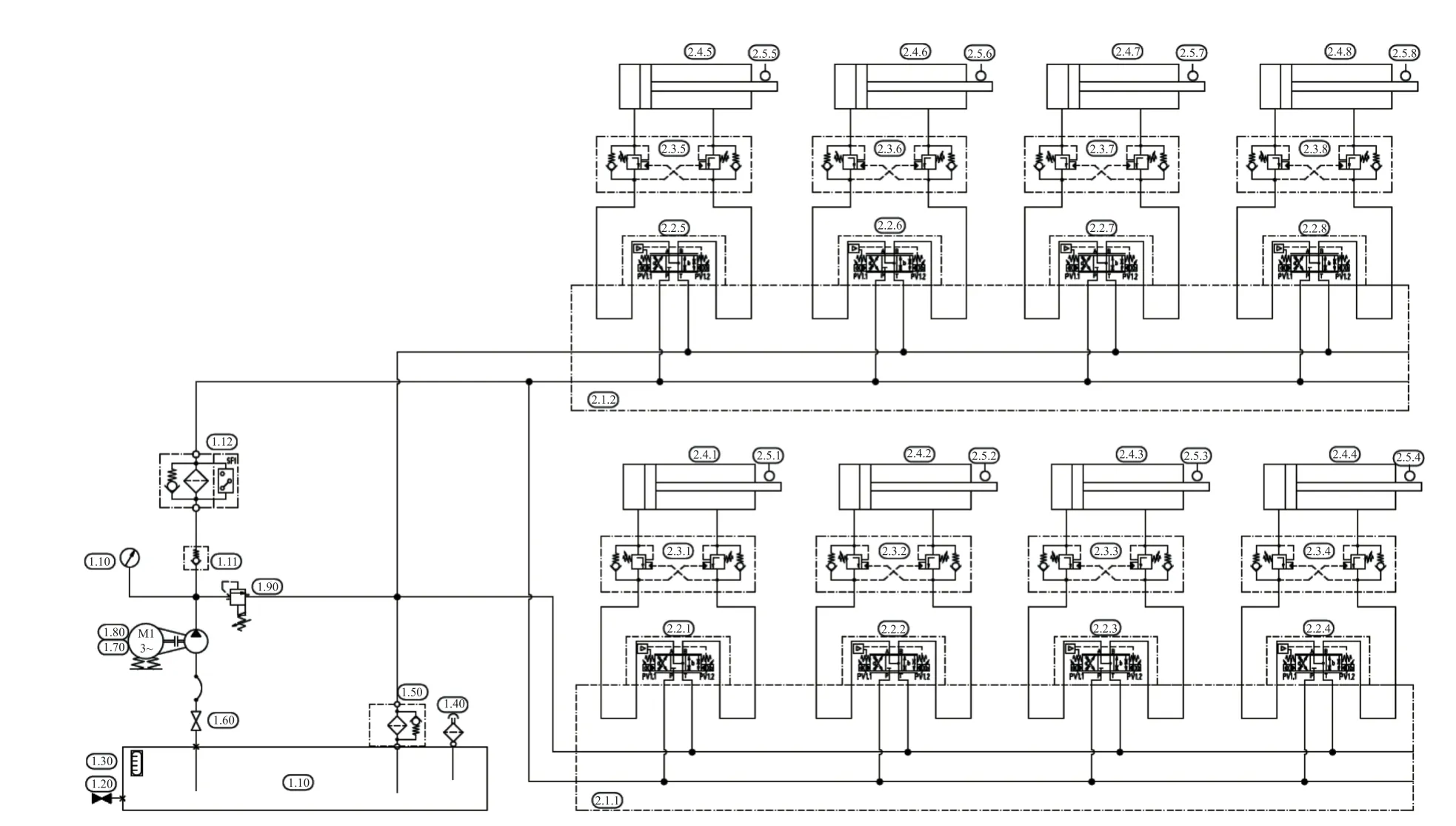
图4 横展机构液压系统原理图
油缸位移传感器采用磁致伸缩位移传感器,具有高精度、高可靠性和无磨损等优点。液压系统使用比例换向阀在精度控制、速度调节、环境适应性等方面有显著优点,可有效避免不同负载情况下的不同步现象[3−5]出现。由于天线横展驱动机构分布跨度大,为提高控制精度,减少信号衰减损耗影响,因此,所选型使用的放大器、换向比例阀和磁致伸缩位移传感器均采用电流式信号控制。
3 横展同步控制策略
相对于常规线性调节控制策略,采用PI控制策略能提高系统响应速度,具有超调量小、稳态误差小的优点。以横展伸出动作为例,按照油缸分布顺时针标为1—6号,给定2号油缸比例阀开口输出值为定值U2=U0,为保持1号和2号油缸同步,根据两油缸位移传感器反馈差值ΔS21K,实时计算1号油缸比例阀开口度的增益值,增益值加上基础值为比例阀开口度的输出值为U1K。PI同步控制原理图如图5所示。
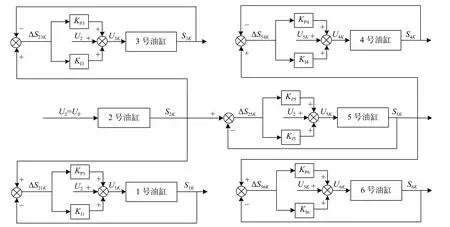
图5 横展机构PI同步控制原理
控制系统采样周期为5 ms,ΔS21K=S2K−S1K作为动作启动后控制器第k周期的偏差值,积分值为控制器从0到k周期ΔS21j的累加值,其中j=0,1,2,···,k,KP1和KI1分别为1号油缸的比例系数和积分系数,PI算法公式为

整理式(1),可得U1K,为

同理,3号和5号油缸为保持和2号油缸同步,可推出U3K和U5K的表达式,为:


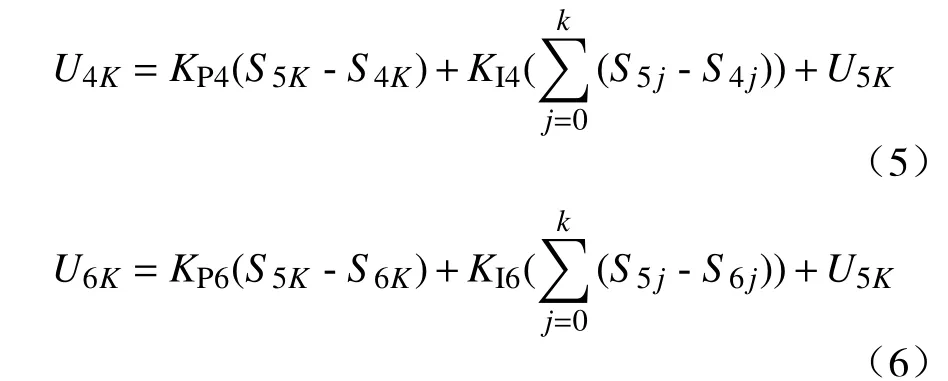
得出5号油缸比例阀开口度U5K后,4号和6号油缸均以U5K为基础值,为保持和5号油缸同步分别计算出增益值,进而用PI控制算法推导出U4K和U6K的表达式,为:
U0为给定2号油缸伸出动作时比例阀开口度的中位定值,对应的油缸运动速度满足架设机动性要求,同时也给开口度调节预留空间。PI算法控制须设置比例阀开口度上下限值,防止输出值溢出。完成PI同步控制算法程序后,使用调试笔记本与控制器X20CP3586网线连接通信,调用AS软件Trace功能跟踪横展伸出过程中各油缸位移差变量值,运动结束后生成位移差值变化曲线图,根据变化曲线图按照先调节1号和3号再调节5号最后调节4号和6号油缸的比例系数和积分系数的顺序调控。根据PI控制原理可知:比例系数偏大会引起系统振荡,偏小则调节速度慢;积分系数偏大消除偏差快、但稳定性减小,偏小则系统偏差波动周期长。本文先尝试预设各油缸系数值,再按照调试顺序依次根据位移差变化曲线图微调油缸比例系数和积分系数,直至横展展开运动过程中根据位移差值能快速响应且稳定在同步精度需求范围内,并将此组参数作为横展展开的PI控制参数,如1号油缸比例系数KP1=9.8、积分系数KI1=0.6。
区别于横展伸出动作,执行横展收回动作时油缸为有杆腔进油驱动,此时给定的2号油缸比例阀开口度值按照进油口有效横截面之比折算,其值要小于U0,再按照同样的调试过程整定横展收回各油缸的比例系数和积分系数。
4 横展控制界面设计
工控触摸屏采用型号为5AP1120.101E贝加莱10.1英寸彩色触摸屏,使用Automation Studio软件开发车载雷达伺服控制界面。其中横展控制界面左侧显示边块横展油缸状态,数字1—6旁边的圆圈为绿色表示相应横展油缸正在动作,对应文本框里的数值为该油缸位移传感器反馈位移值,中间部位5个文本框为连接线对应的两油缸位移差值。横展控制的故障报警信息位于界面右侧:控制器故障、5个位移超差故障、6个放大器故障和6个位移传感器故障;圆圈红色表示故障报警,绿色表示无故障。横展伸出运行过程中每个扫描周期循环检测:控制器自检是否有故障;两油缸位移差值是否超过设定报警值;放大器自检输入信号是否处于正常范围;位移传感器反馈值是否处于设定范围。控制界面下方有两行动作指令,其右侧圆圈的不同颜色标识该动作指令的状态:蓝色闪烁标识该动作正在运行;绿色常亮表示处于动作到位状态;灰色表示该动作既不正在运行也未动作到位。由于液压系统迟滞性,位移超差报警界限值设为2.5 mm,确保在调试和工作过程中不会因位移超差导致列骨架形变损坏其内部功能器件,横展控制界面如图6所示。
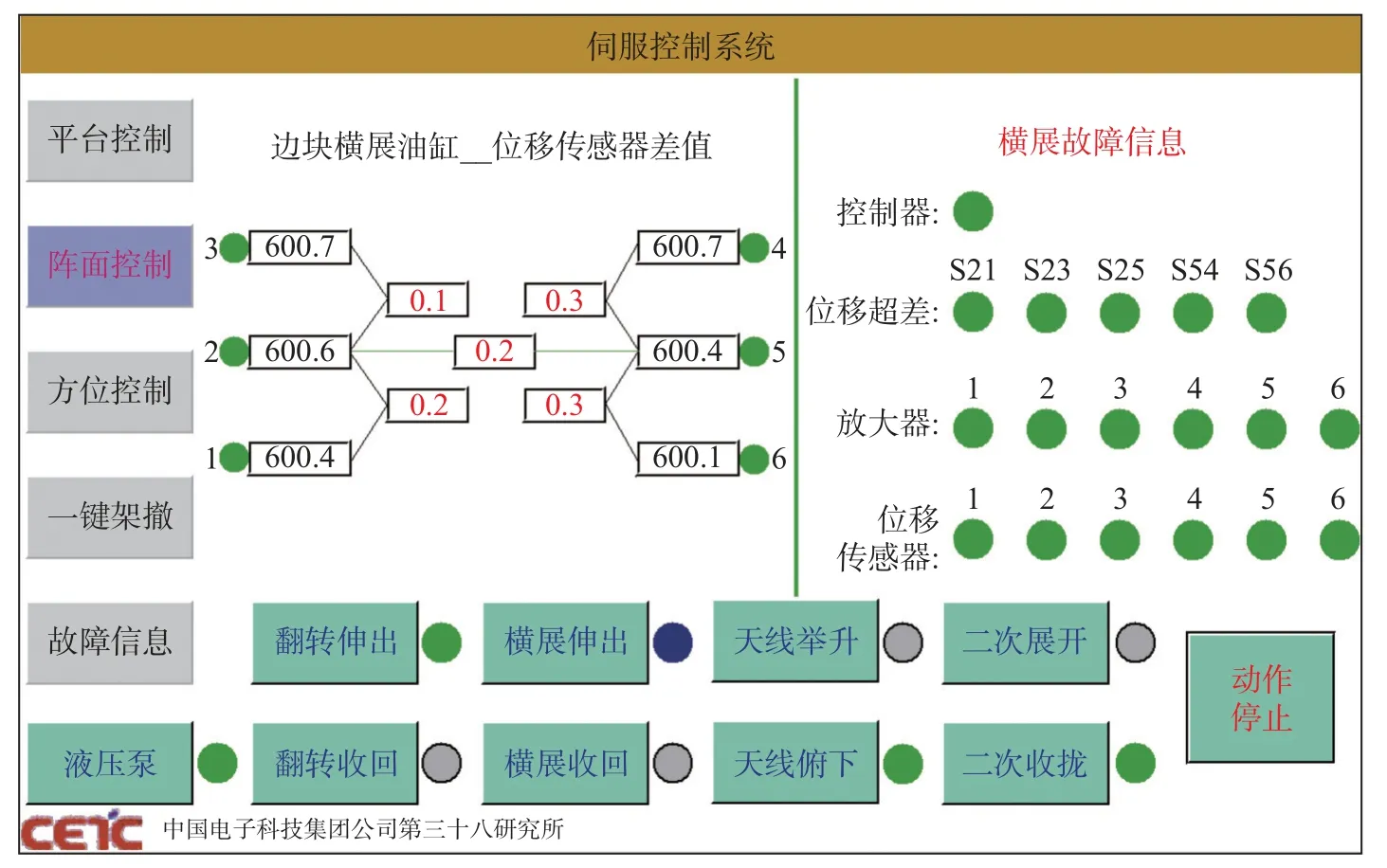
图6 横展控制界面
5 实验验证
对该控制系统进行了实验:执行横展动作指令,观察770 mm全行程过程中位移差值变化。实验结果表明,动作起始瞬间最大位移差值为1.5 mm,PI控制策略快速响应,在2 s内将位移差值动态调整到0.8 mm以内。同时,经过大量实践和环境试验验证结果表明,该横展同步控制系统能实现天线两侧六缸的精准同步控制,动态位移差值小于2 mm,满足某型雷达阵面精度3 mm的要求且有效保护边块列骨架,解决了低频段大口径雷达天线快速架撤和高机动运输难题,为某雷达项目的顺利研制解决了瓶颈问题。
6 结束语
针对某新颖的高压缩比横展结构的天线,本文设计了精准同步控制系统。该系统采用PI同步控制算法,实现了天线两侧六缸的精准同步,其PI算法具有可调性高、应用范围广等特点。同时该控制系统使用主流控制器件和C语言编程,其移植方便、通用性好、工程应用价值高。
猜你喜欢
汽车零部件(2022年5期)2022-05-30
电子乐园·上旬刊(2022年5期)2022-04-09
电子乐园·上旬刊(2022年5期)2022-04-09
科学与财富(2021年35期)2021-05-10
发明与创新·大科技(2020年6期)2020-06-22
高中时代(2017年7期)2018-02-24
南方农业·下旬(2017年8期)2017-10-23
科技创新与品牌(2017年9期)2017-10-20
农业工程技术·温室园艺(2017年3期)2017-07-13
集装箱化(2016年8期)2016-10-20