
城市地表建筑物密集区的微动探测方法
——以成都市某海鲜批发市场的 浅表精细探测为例
2022-08-04 14:19张陈张伟易永杰姚世民何全华
科学技术与工程 2022年19期
张陈, 张伟, 易永杰, 姚世民, 何全华
(1.成都理工大学地球物理学院, 成都 610059; 2.中国地质调查局成都地质调查中心, 成都 610082; 3.四川省川冶陆零伍工程物探检测有限公司, 成都 610082)
中国城市轨道交通行业发展迅猛,截至2020年底,有44座城市已经开通运营轨道交通线里程达7 715.31 km,此外,规划将要修建的轨道线路总里程达6 701 km,行业发展潜力巨大[1]。轨道交通工程建设必须有完备的轨道沿线地质资料做支撑,城市内的地质勘探往往受到众多人文因素干扰,常规地质勘探手段难以达到设计要求,目前常用的勘探方法是钻探和原位测试相结合的综合勘探方法[2],这类方法因为对人工建筑有损,在许多情形下不能使用,造成局部地质资料的缺失。
微动勘探作为一种利用天然源的面波勘探技术,具有无损、抗干扰能力强、能适应多种特殊工作环境、效率高成本低等多种优点[3-4],它利用低频天然源信号,因此常用它来解决一些深部地质问题[5],例如,侯超[6]用微动勘探方法探查压煤区的深层地质情况;付微等[7]用微动勘探圈定深部含水破碎带和热储水层的区域分布取得了良好的效果;程建设等[8]等将微动勘探方法应用在病险水库的隐患探测上,为堤坝隐患治理提供了精确的指导;李巧灵等[9]用微动测深技术探明了新生界厚覆盖层的地质结构。一般来说,微动勘探利用的信号频率较低,因此,它对高频信号的信息获取能力不足,所以往往浅表层是探测盲区,黄真萍等[10]通过对比分析主动源与被动源的面波勘探方法后,认为可以通过主动源与被动源相结合的方式进行面波勘探;李凯[11]从理论上系统阐述了主动源与被动源相结合的面波勘探方法的有效性和可行性。在城市建成区的实际工作中,主动源面波勘探方法存在产生噪声、损伤人工建筑结构、物权条件不允许等弊端,对城市居民生活造成影响,常不被允许使用。
在此基础上,现提出一种新的微动观测技术,仅使用被动源信号对城市建成区进行浅部精细化探测,并结合实际案例分析微动勘探方法在城市轨道交通领域应用的实用性和有效性。
1 微动方法技术
微动勘探的理论基石是建立在平稳随机过程理论和弹性波场理论上的,根据平稳随机过程理论提取出采集时间段内的有效信号,再依据弹性波场理论中面波的频率与波速随时间和空间的变化而变化的特性,用相应的方法找出频率与速度的关系,即提取频散曲线,进而对频散曲线反演估算地下介质的横波速度结构,最终推断地层分布情况。
1.1 扩展空间自相关法
根据Aki[12]提出了空间自相关法(spatial auto-correlation,SPAC)的理论,其基本原理是假定台阵周围不同方向入射的信号具有平稳随机特征,在同一频率具有相同的相速度,在此前提下,考虑两个不同位置的台站接收到的信号空间坐标的互相关,然后对不同方位相同距离的台站对求方位平均,可以得到方位平均后的空间自相关系数,用空间自相关系数去拟合第一类零阶贝塞尔函数,从而计算出不同频率的相速度,最终得到面波的频散曲线。
SPAC法的观测台阵需要布设成规则多边形,对于多个不同半径的圆形阵列,空间自相关法要求分别计算各自半径的频散曲线,再合并成完整频散曲线,效率比较低,并且在实际工作中,施工场地往往不能满足布设规则台阵的条件。为解决这个问题,扩展空间自相关法(extended spatial auto-correlation, ESPAC)[13]被提出,这一方法的理论基础与SPAC方法大致相同,即将采集的微动信号代入式(1),可解出某一组的空间自相关系数ρ(ω,r)。
(1)
式(1)中:ω为角频率;r为半径或者指参与计算的两点之间的距离;θ为方位角;Sox(ω,r,θ)为圆心到圆周的空间自相关函数;Re[·]表示取复数的实部;So(ω)和Sx(ω,r,θ) 分别是圆心和圆周上微动记录的功率谱[13]。
空间自相关系数中有频率ω和半径r两个变量,若两个变量同时存在,则式(1)是多解的,SPAC法的思想是,由于台阵是规则的,相同的半径r对应多个接受点,于是先固定半径r,分别解出与之对应的所有ω,再换新的r,重复之前的操作。与之相对的,ESPAC的思想是,先固定频率ω,把半径r作为唯一变量。具体来说就是,对于某一频率ω,不同半径r和对应的空间自相关系数ρ(ω,r)组成r-ρ(ω,r)序列,通过最小二乘法寻求最优化贝塞尔函数来拟合r-ρ(ω,r)序列,并求出贝塞尔函数的宗量rk,接着由式(2)求出瑞雷波相速度c(f),重复上述过程,计算其他频率的瑞雷波相速度,最终获得频散曲线。

(2)
式(2)中:rk为零阶贝塞尔函数宗量;c(f) 为瑞雷波的相速度;f为波的频率。
这种思路可以同时处理多个半径的圆形阵列,提高了数据处理效率,这就为非规则台阵的应用打下了基础,推动微动勘探方法从理论走向实用[14]。此后,学者们对ESPAC法进行了深入研究,Okada[15]详细研究了ESPAC法,Ohori等[16]将 EPSAC法应用到线性阵列中。
1.2 新型微动观测台阵
一般来说,地震勘探观测系统的设置要满足3个要求:一是采集数据的质量符合相关规范,二是探测有效深度要达到设计要求,三是实地施工要方便、高效、适应性强。
传统的微动勘探观测方法中,SPAC法与ESPAC法各有优势,圆形或嵌套三角形台阵采集的数据波场方向性较强,精度较高,但台阵布置需要较宽阔平坦的场地,线型、L形或T形台阵布置灵活,能适应狭窄的采集环境,但它接收信号的方向较单一,采集的数据抵抗不规则人为干扰的能力差,会影响频散谱的能量集中度,给相速度频散曲线的提取带来一定的误差[17],为提高数据质量,往往需要更长的采集时间。其次,无论是SPAC法还是ESPAC法,一个多道的观测台阵只对应一个测点,要想得到一幅二维剖面图,则必须将台阵整体平移以测出测线上每个点的数据,这样施工效率较低;此外,微动勘探利用的是低频信号,一般用来探查深部地质构造,若想探明浅部地层的地质结构,对地层精细划分,则必然要获取有效的相对高频的信号,即要获取前文提到的因人类活动产生的常时微动信号。
针对上述问题,借鉴于分布式高密度电阻率法的布极方式和常规地震勘探方法中多次覆盖的原理,提出设置连续滚动的线性观测台阵,如图1所示,至少有两种类型的布置方式,它们都有一条沿测线方向的主线,另外还有一条旁侧线,主线检波器的间距为a,旁侧线检波器间的间距为b,旁侧线的检波器布置频率低于主测线检波器的频率。图1中,类型1类似十字形台阵,适用于车流量较少的步行街、巷道等;类型2类似于T形台阵,适用于车流量较大的街道。通过调整侧方向检波器间的间距b,使车辆可以从中间顺利通过,这样既不影响道路上车辆的正常行驶,还可获取更多常时微动信号。在实际操作中,可根据现场情况混合使用两种类型。
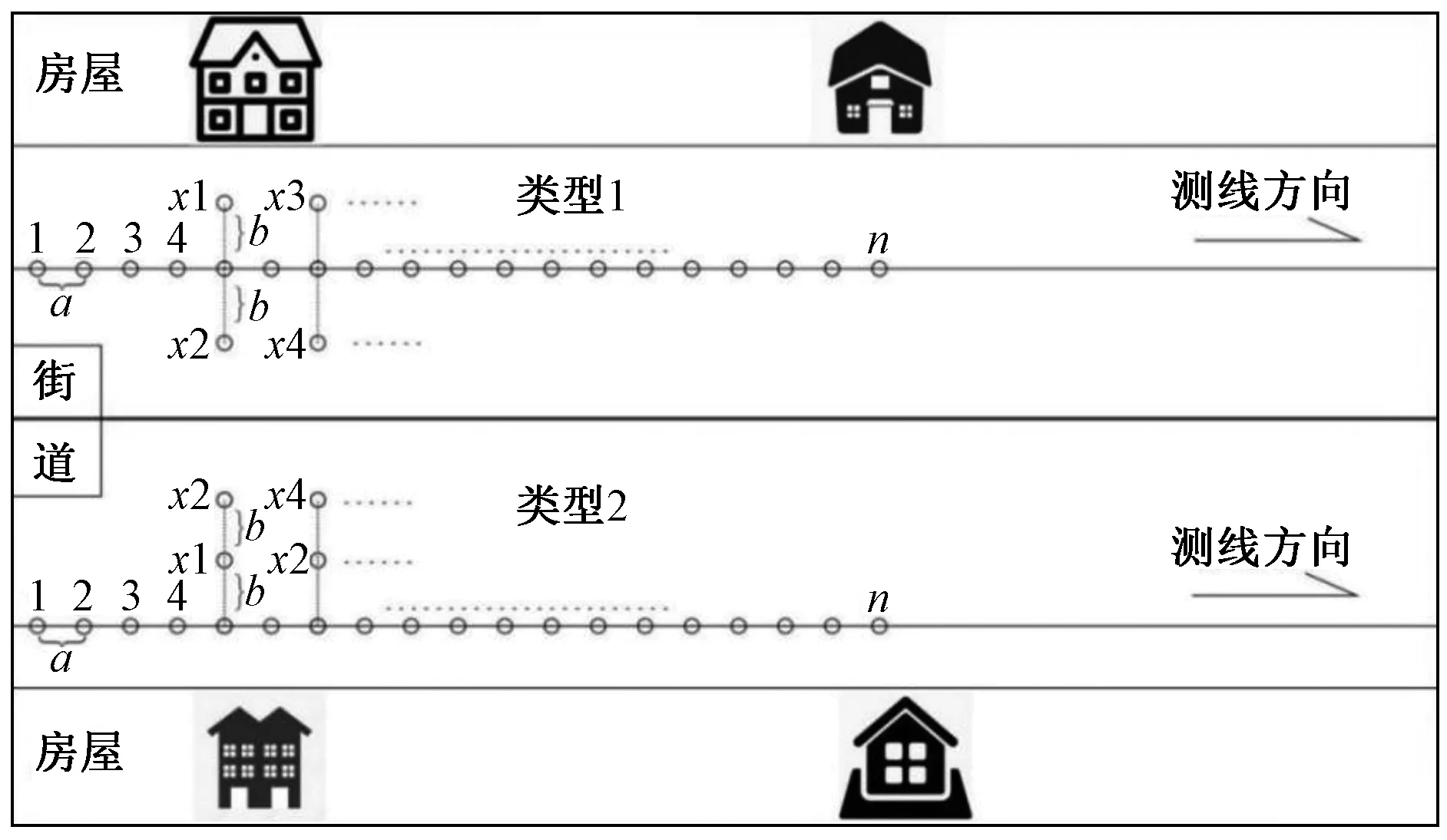
图1 新型观测台阵Fig.1 New type of observatory array
对单独一个测点来说,由于是多个检波器组成的台阵同时采集数据,在对某一个测点进行自相关运算时,参与计算的检波器个数是可以任意选择的。

图2 检波器组合模式Fig.2 Geophone combination mode
如图2所示,该方法的台阵组合模式并不是单一的,有多种台阵组合模式可以选择,在室内资料处理之前,可以先选定一种检波器组合模式作为本测区资料处理的标准模式,在满足对大多数点处理效果质量达标的同时,还要兼顾处理效率,检波器参与运算少,处理速度越快。对重点探测区域可以选择多种台阵组合模式进行运算,相互印证以提高处理精度;对于某些检波器的数据受到干扰质量不佳时,由于检波器布置密度较大,可直接剔除坏道,从周围较远处选择更多检波器参与运算,获取更多有效信息,因此只要现场操作符合规范,一般不存在对坏点重测的情况,即它的容错率较高。
此外,根据面波传播的规律,当深度z与波长λ接近相等时,其能量迅速衰减,这表明,某一波长为λ的面波速度与深度小于λ的地层物性有关,通常认为,面波的勘探深度约为半个波长。
大量实验表明,微动勘探的最大有效深度H与检波器的自然频率、工区地层环境、台阵的最大计算距离D有关,最大计算距离D指在进行自相关计算时,计算中心与离中心最远检波器之间的距离。在工作中能灵活调整的参数只有D,线性滚动台阵的检波器排列是连续的,对单点的运算,选用更多主线上的检波器就意味着更大的计算半径,也就增加了探测深度。
对一整条测线来说,由于同时布置多道检波器,它的优势在于:
(1)检波器的利用率显著提高,同一时间可以测量多个测点的数据,大大提高了采集的效率。
(2)侧方向检波器的存在,可以获取更多方向的信号,可以压制单一方向上人为因素的干扰。
(3)通过调整检波器间距b,能很好地适应城市建成区内的公路、步行街、小巷道等复杂采集环境。
(4)与常规微动台阵相比工作效率大幅提高,施工人员更少,更轻松。
1.3 台阵对比实验
在城市建成区这样的特殊工况背景条件下,干扰源众多,工作时间一般只能选择在夜晚,数据的采集不仅要保证质量,还要保证效率,因此选择一种合适的采集台阵非常重要。近年来,相关地质工作者已经把微动方法应用在多种勘探环境中,并取得了显著的成果,圆形、三角形、L形、T形等多种台阵布置方法已经被证实是有效的方法。为验证本文提出的连续滚动台阵的有效性,在市内某宽阔街道上设计一条实验测线,分别用嵌套三角形台阵、线性滚动台阵进行测量,提取各类型的单点频散图谱做对比分析。
从图3可以看出,在各类型台阵单点频散能量谱清晰收敛的范围内,特别是低频区域,具有较高的相似度,因此据此反演后的视横波速度及地层划分也将大致相同,探测深度均能达到30~35 m。但在高频区域,存在一定差异。
如图3(a)所示,嵌套三角形台阵采用3层嵌套,共使用10个检波器,最外层三角形外接圆的半径约为6.93 m。从频散图谱中可以看出,嵌套三角形台阵的能量谱连续性好,它对应的信号高频端收敛范围已经大于预设的频带限制,因此,嵌套三角形或者说圆形台阵的抗干扰性能最强。
如图3(b)、图3(c)所示,T形和十字形台阵选用11个检波器,最大计算半径为12 m。在相同的采集时间内,T形台阵与十字形台阵频散谱亦能明显收敛,且连续性较好,在图示频率范围内,高频端收敛效果较好,有效压制外界人为干扰,对浅部地层结构的精细划分有重要意义。
如图3(d)所示,线型台阵选用9个检波器,最大计算半径为12 m。从频散图谱中可以看出,线型台阵相对低频端能量谱收敛效果好,但对于高频端能量谱收敛效果差,可能是受到外界干扰导致的,要想达到与前者相似的效果,应该需要更长的采集时间。
因此,在条件允许的情况下,应该优先选用嵌套三角形或圆形台阵,但在城市建成区的微动勘探工作中很难达到此阵型的布置条件,如本试验中,需要最大半径约为7 m宽的场地,还需要满足车流量少、行人少、足够长的条件,这是很难实现的。因此,线型滚动台阵的排列方式以其足够强的环境适应力、容错性、高效率、高分辨率,应该是一种较好的微动台阵布置方式。
2 工况特征与测线布置
成都市位于四川盆地西部,介于东经102°54′~104°53′和北纬30°05′~31°26′之间,该轨道交通工程位于成都市平原区,整体北东高,南西低,地势平坦,起伏小,地形地貌条件简单,地面高程434~462 m。根据成因类型不同,沿线依次跨越川西平原岷江水系Ⅰ、Ⅱ、Ⅲ级阶地,工区地貌单元为岷江水系冲积平原Ⅱ级阶地,地势平坦,场地整体起伏微小。
2.1 工作区的工况背景
工区位于成都市内某海鲜市场内部,由图4可见,市场周围道路众多,车流量大,建筑物密集,市场内部巷道四通八达,路面普遍很窄,大多在3 m以内,地面为水泥硬化路面,水产品商铺较多,地面潮湿,低洼处有积水,地表下污水管道纵横交错,不间断的有水流流过。整体来看,工区地势平坦,高程均在439~440.5 m。在白天,顾客络绎不绝,完全没有布置微动台阵的空间,因此,勘探工作只能在晚上进行。
2.2 测线位置与外业施工
该轨道交通线路穿过此海鲜市场内部,由于物权原因,市场内部不能开展钻探作业,为查明市场内部地下地质构造、不良地质体等地质情况,划分地层层位,测线布置在海鲜市场内部巷道内。此外,为验证微动方法的准确性,在离工区最近的3口钻孔处,采用相同的检波器、道间距及采集时长,布置十字形台阵作对比试验,测得结果经过处理后与钻孔层底划分作对比,评价微动方法的准确性。
如图4(a)所示,共布置两条测线,分别命名为P1线、P2线,由于场地条件狭窄,利用线型滚动排列布置不规则台阵采集数据。其中,P1线位于双车道上路面较宽,布置成类似十字形的线性滚动台阵,总长为180 m,点距为5 m,主线上道间距为2.5 m,旁侧线上道间距为2.5 m;P2线位于商铺间的窄巷道中,布置成类似T形的线性滚动台阵,总长为110 m,点距为5 m,主线上道间距为2.5 m,旁侧线上道间距为2 m。从更大比例尺的图4(b)和图4(c)可看出,测线布置在密集的建筑群内,施工条件并不理想。
排列布置如图5所示,两线单次排列均是共用31道检波器,一次可同时测6个测点,单次采集记录时长为45 min,搬站时长为5~15 min,一个排列的采集时间确保在1 h以内,搬站按照高密度电阻率法滚动方式向前移动,同时记录下每个排列内各位置的检波器编号。
数据采集工作使用深圳面元智能科技有限公司的SmartSolo地震勘探数据采集系统及配套的IGU-16HR节点振动传感器,其自然频率为5 Hz,采样率为0.5 ms,各道坐标使用搭载千寻知寸-FindCM厘米级精度定位服务的RTK设备采集。数据经节点仪搭配的数据采集系统分割后,使用北京骄佳技术公司的Geogiga Surface Plus软件中提供的ESPAC处理模块进行处理。

图3 不同台阵类型对比分析Fig.3 Comparison and analysis of different array types

图4 分级工区影像图Fig.4 Image map of graded work area

图5 单次排列布置示意图Fig.5 Schematic diagram of single arrangement
3 工作区地质背景与物性特征

由于微动研究的物性主要是介质的剪切横波速度,根据轨道工程在工区附近的钻探工作资料,整理的目标区内,地下各层介质横波速度见表1。
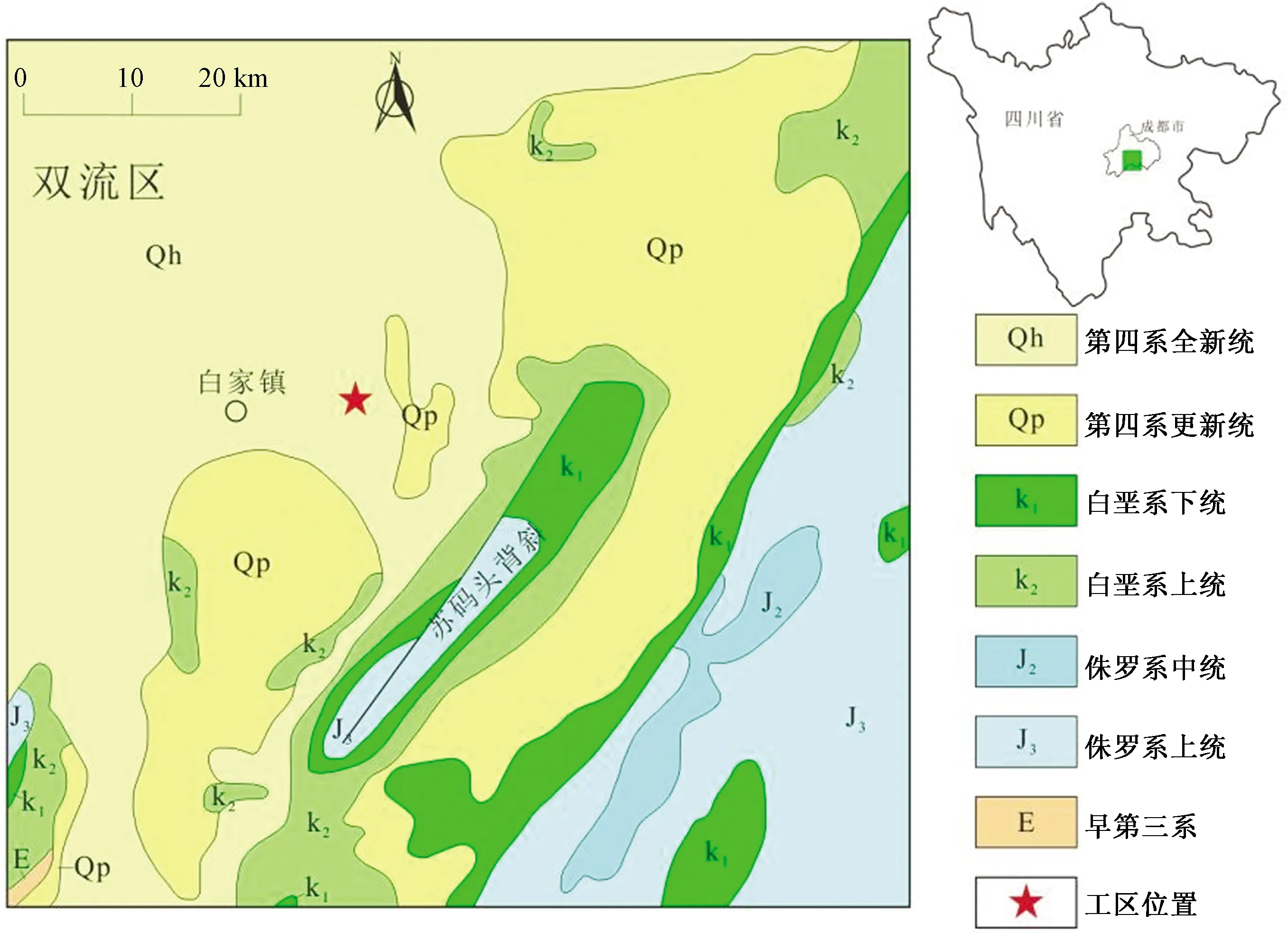
图6 工区地质背景图Fig.6 Geological background of the working area
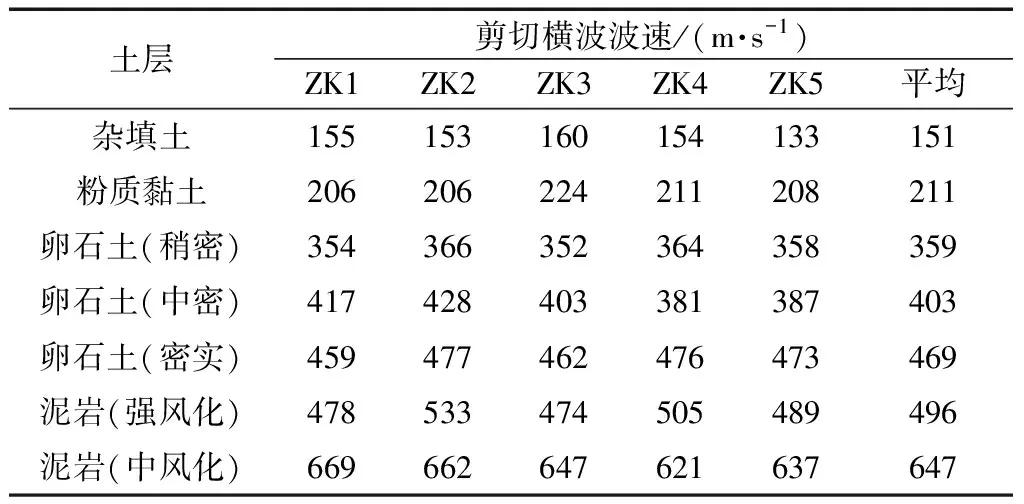
表1 工区钻孔剪切横波波速统计表Table 1 Statistical table of shear wave velocity of borehole in working area
4 勘探成果与钻孔验证分析
4.1 微动推测结果与钻孔层底划分对比
为验证微动方法的准确性,在工区附近一口钻孔处,采用相同的检波器、道间距及采集时长,布置十字形台阵做对比试验,测的结果经过处理后与钻孔层底划分作对比,对比结果如图7所示。
如图7所示,通过微动单测点的横波反演速度结构与测点处钻孔柱状图对比可见,单点探测结果能清晰区分覆盖层、卵石层、基岩层的界线,与钻探成果大致吻合,这说明在钻探施工不便的情况下,微动方法是一种有效的替换方法。
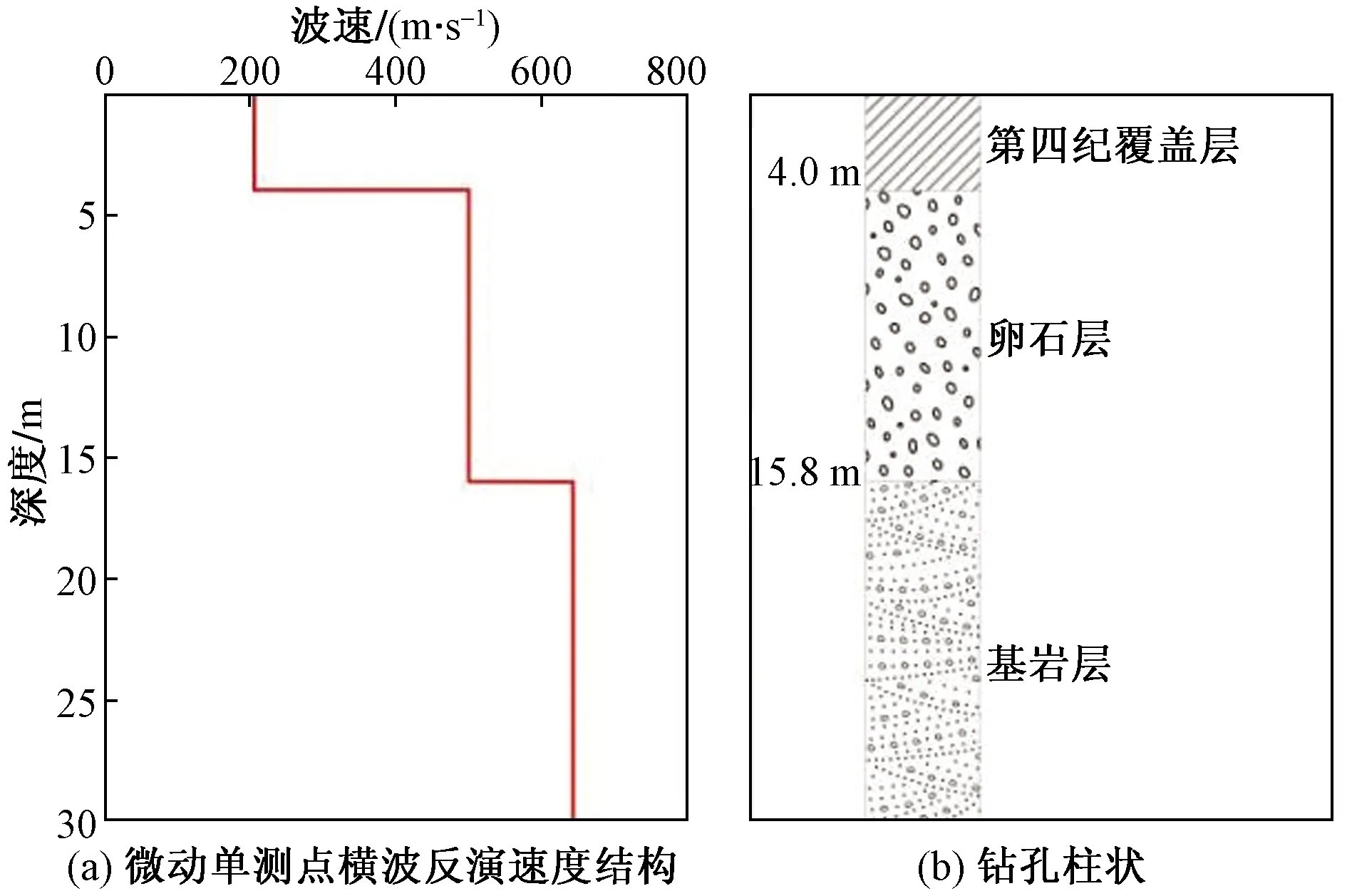
图7 单测点S波速度结构与钻孔验证Fig.7 S-wave velocity structure at single measurement point and borehole verification
4.2 P1线成果分析
P1线位于市场边双车道上,路面较宽,微动视横波速度剖面如图8所示,该区域地层由浅至深视横波速度逐渐增大,浅部地层较平缓,图上可见存在明显的波速突变界面,从上至下可明显看出4个岩性界面,分别是,杂填土层,冲积、沉积粉质黏土,沉积卵石土层,风化泥岩层,再根据工区周围岩土工程资料及收集的介质波速信心,沉积卵石土层可细分为稍密、中密、密实三层,风化泥岩层可分为强风化、中风化两层。
由图8可见,杂填土层海拔437.5~440 m,层厚不均匀,是市场建设时,施工平整过的土层,厚度在0.5~3 m,图8中里程120~160 m杂填土层较薄,主要成分为砂砾、卵石,部分为粉土、粉质黏土,局部上部含大量混凝土块等建筑垃圾,表层多为沥青混凝土路面,划分的标志是视横波速度小于170 m/s。

图8 P1线视横波速度剖面图Fig.8 P1 apparent s-wave velocity profile
粉质黏土层海拔435.5~438.5 m,工区末端埋深较深,整体来看地层较平,黏土层主要由黏粒组成,土质较均匀,层状构造,结构致密,具有弱-中等膨胀性。
卵石土层是成都平原常见的地层结构,海拔约在423~435 m,按压实程度从上至下可细分为稍密、中密、密实三层,在图8中,卵石土细分层界面用洋红色线条区分,厚度分布不均匀,其中稍密层层厚2~4 m,中密层层厚1~3 m,密实层层厚4~7 m,黏土层与卵石层界面划分的标志是速度大于290 m/s。
图9中基岩层为白垩系上统灌口组泥岩,颜色呈紫红色、褐红色,主要由黏土矿物组成,泥质结构,中厚层状构造,按风化程度分区强分化和中风化。强风化泥岩层与卵石层界面海拔在423~428 m间,界面起伏不平,测线末端界面埋深较深,与卵石层界面区分的速度标志是速度大于500 m/s。中风化泥岩层与强风化泥岩层界面划分标志为波速大于700 m/s,其界面起伏明显,深度变化大。
4.3 P2线成果分析
P2线位于市场内部小巷道上,路面窄,地面有积水,地下有排水管道,微动视横波速度剖面如图9所示,该区域地层由浅至深视横波速度逐渐增大,浅部地层较平缓,可见存在明显的波速突变界面,从上至下可明显看出4个岩性界面,分别是,杂填土层,冲积、沉积粉质黏土,沉积卵石土层,风化泥岩层,再根据工区周围岩土工程资料及收集的介质波速信心,沉积卵石土层可细分为稍密、中密、密实三层,风化泥岩层可分为强风化、中风化两层。
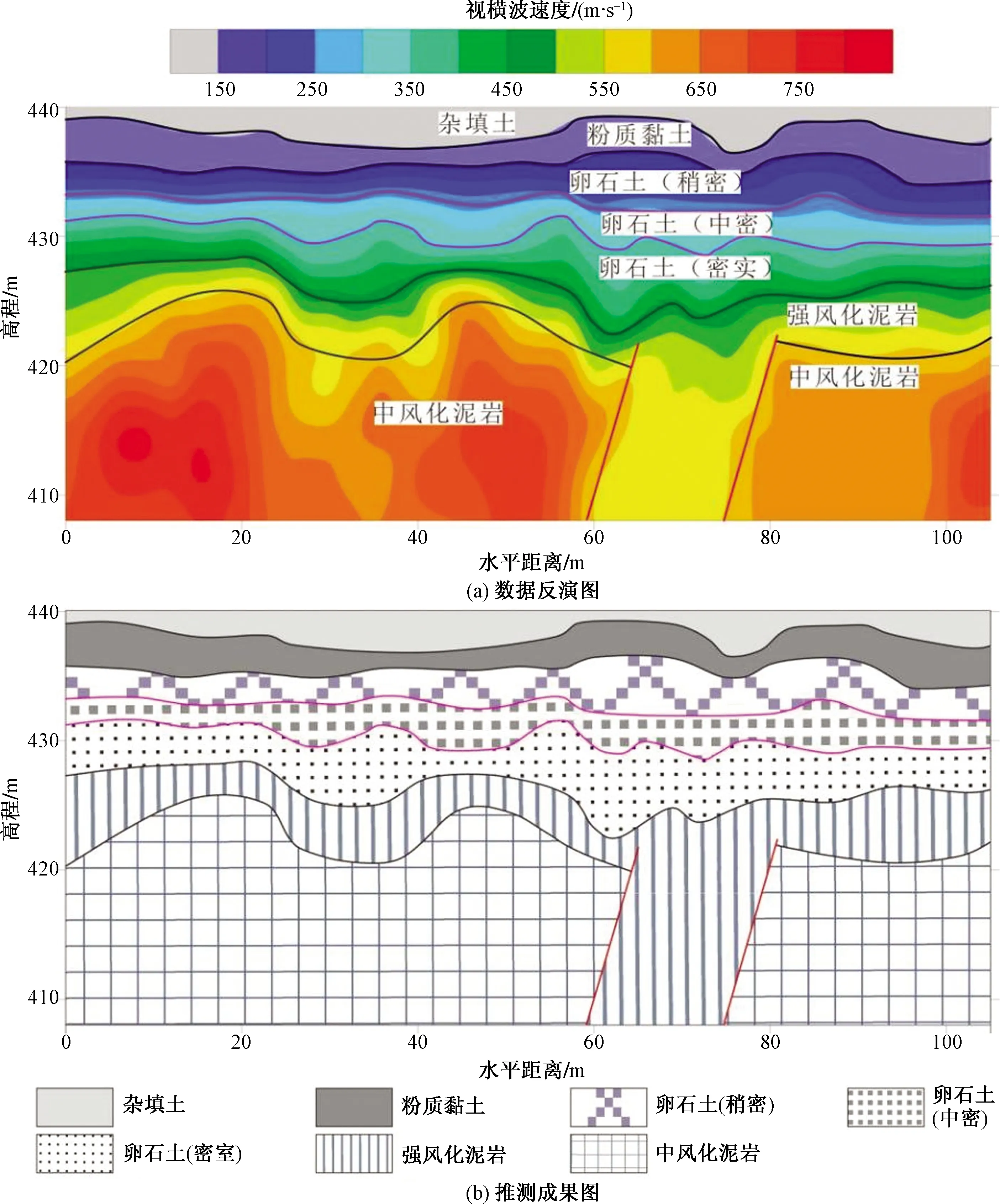
图9 P2线视横波速度剖面图Fig.9 Apparent s-wave velocity profile of P2 line
杂填土是市场建设前平整场地堆砌而成的,海拔437.5~440 m,层厚不均匀,厚度在0.5~3 m,划分的标志是视横波速度小于170 m/s。
粉质黏土层海拔436~438.5 m,层厚分布不均匀,相较于P1测线,此区域黏土层相对较厚,整体来看地层较平,平均厚度约为2 m,黏土层主要由黏粒组成,土质较均匀,层状构造,结构致密,具有弱-中等膨胀性。
卵石土层是成都平原常见的地层结构,卵石层与黏土层界面较平,界面海拔为434.5~436 m,按压实程度从上至下可细分为稍密、中密、密实三层,在图9中,卵石土细分层界面用洋红色线条区分,厚度分布不均匀,其中稍密层层厚2.5~4 m,中密层层厚2~3 m,密实层层厚3~7 m,黏土层与卵石层界面划分的标志是速度大于290 m/s。
强风化泥岩层与卵石层界面海拔在423~427 m,划分的速度标志是速度大于500 m/s,界面起伏不平,在水平里程60~68 m,地层横向不连续,波速呈“下凹”趋势,故推测为一处断裂。中风化泥岩层与强风化泥岩层界面划分标志为波速大于700 m/s,其界面起伏明显,深度变化大。
5 结论与建议
(1)微动方法具有无损探测、抗干扰、设备轻便的优点,能轻松适应建筑物密集,交通线路复杂,强背景干扰的工作环境,在钻探工作难以开展的地区,能够成为一种有效的替代手段,为城市地下空间探测工作提供有力技术支撑。
(2)借鉴分布式高密度电阻率法的布极方式和常规地震勘探方法中多次覆盖的原理,提出的线性滚动台阵采集装置,经过单点和整条测线的检验,在探测精度、施工效率、容错性等方面均有其独特的优势。
(3)传统微动方法中,高频信号难以提取,造成浅部盲区,往往采用主动源方式补齐浅部地层的高频信号。经过实验,配合具有较高的自然频率的检波器及较小的检波器间距,可以清晰提取到50~10 Hz范围内高频信号,有效减小了微动方法的浅部盲区,同时也提高了微动方法的分辨率。这不仅消除了主动源施工对环境的干扰,还符合城市地下空间探测中,探测深度相对较浅,探测精度高的要求。
(4)与高密度电法一样,文中提出的新型台阵布置方法对单点进行计算的过程是一种按特定规律的重复运算,因此可通过编程实现自动化的数据运算流程。
猜你喜欢
石油管材与仪器(2022年6期)2023-01-03
信息技术时代·中旬刊(2019年1期)2019-10-21
雷达学报(2018年5期)2018-12-05
雷达学报(2018年5期)2018-12-05
宇航计测技术(2018年3期)2018-09-08
中国公路(2017年9期)2017-07-25
科学与财富(2017年1期)2017-03-17
经济(2017年4期)2017-03-13
中国煤层气(2015年2期)2015-08-22
中国科技纵横(2014年14期)2014-08-27
