基于机载LIDAR的水库库容曲线计算方法
2022-08-27 07:35李明峰王亚梅王冬梅梁文广
江苏水利 2022年8期
方 聪,李明峰,王亚梅,王冬梅,梁文广
(1.南京工业大学测绘科学与技术学院,江苏南京 211816;2.江苏省水利科学研究院,江苏南京 210017)
水库库容是水利枢纽工程设计、运营管理的重要参数之一,为水库发电、灌溉、防洪等调度提供数据支撑[1]。传统库容计算方法是利用全站仪、水准仪对水库进行断面测量,效率较低,水库泥沙淤积与水域周边地形的变化,造成计算值与实际库容出现偏差。随着测量技术的发展,水库库容的计算方法取得进展。孟凡超[2]利用GPS技术获取水库周边数据,测算出官昌水库库容。与传统方法相比,在保证精度的同时,提高了作业效率;李鑫龙等[3]利用无人机倾斜测量,基于GIS技术,计算出黑龙江某水库库容曲线;王元超[4]提出通过多次空中三角测量,利用GIS空间叠加分析与CAD 辅助制图,实现水库库容的高效计算。然而上述的方法仍存在不足,GPS获取数据的效率提高有限,重复劳动量大;摄影测量虽然效率高,但对于植被覆盖度高的山区无法有效获取地面信息;空中三角测量无法实现上视拍摄,导致水库部分空间缺失,库容计算精度较低。
随着低空无人机的发展,机载激光雷达(Light Laser Detection and Ranging,LIDAR)应运而生。机载LIDAR凭借高密度、高效率、高精准的优势,能够在复杂地形下探测地理信息数据,进行地形图测绘[5]。针对大面积水库库容曲线的计算效率较低、精度不高等问题,本文利用机载LIDAR 点云数据,建立研究区域的DEM,通过水体积计算,构建出水库的水位高程-水域面积-水量体积模型,并对模型精度进行验证。
1 技术方法
1.1 机载LIDAR技术
机载LIDAR是一种集成了GPS、IMU、激光扫描仪等设备的主动对地观测系统[6]。通过激光雷达发射近红外激光脉冲,经地面反射由传感器接收并获得目标的距离,其原理如图1 所示。实现对地面信息的获取并以高精度密集点云的形式呈现,在多个行业得到广泛应用。
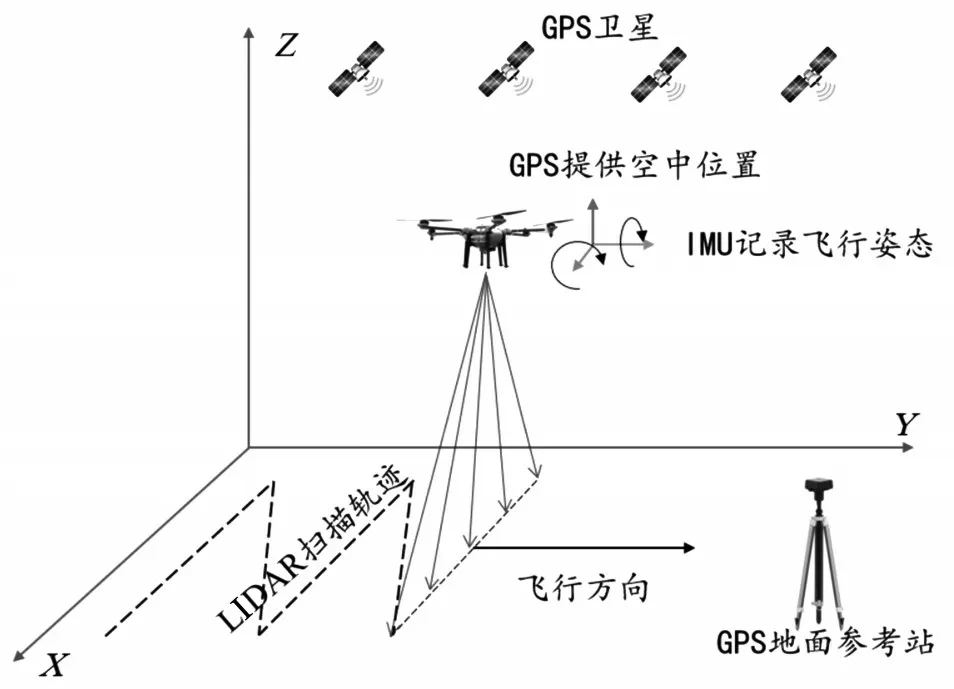
图1 机载LIDAR系统原理
相对传统测量方式,机载LIDAR最大的优势在于高效、高精度的数据采集能力,同时能够穿透植被叶冠获取高分辨率地面数字模型(DSM)。此外,机载LIDAR 一般采用波长在近红外波段的激光脉冲,由于纯净水体在近红外波段反射率极低,难以被激光传感器接收识别,因此在点云中,水体呈现为空洞或点分布特别稀疏的情况,这使得基于机载LIDAR 点云提取水体边界具备独特的优势[7]。因此,通过机载LIDAR点云数据研究水库库容曲线成为最有效的方法之一。
1.2 水库库容曲线构建方法
利用机载LIDAR 在水库低水位时段进行点云数据采集,并对点云数据进行预处理。由于点云中包含植被、房屋、人造设施等非地面点,无法准确构建水库DEM 模型,因此需要对点云数据进行滤波,保留地面点,剔除非地面点。通过高程选取,截取出不同水位H下的点云,利用不规则三角网插值建立不同水位下的DEM 模型,通过栅格计算,统计当前水位下的水域面积S。将不同水位的DEM 进行叠加,通过对多个不同水位下的面积进行积分,即可计算出在多个水位区间下的水量体积Vi,并构建出H-S-V的关系。
研究方法技术路线如图2所示。
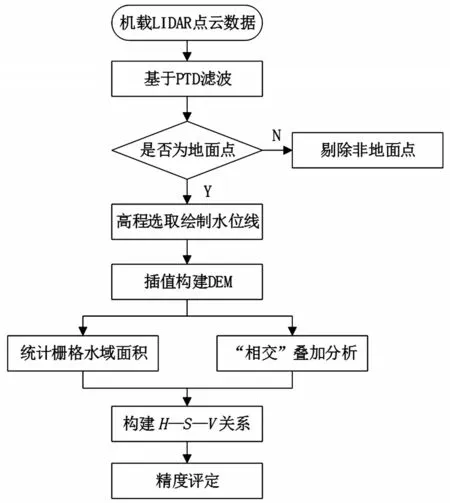
图2 水库库容曲线计算方法
1.2.1 基于PTD的点云滤波
机载LIDAR 点云数据滤波是获取水库及周边DEM的关键,对水库初始水域面积的率定精度起到重要作用。本文采用渐进三角网(PTD)滤波算法,该方法能有效滤除建筑物、低矮植被以及其他地物[8]。其原理是对点云建立格网索引,选取格网中的最低点为种子点建立不规则三角网(TIN),如图3所示。

图3 渐近三角网原理示意
设定阈值,若反复角和反复距离小于设定的阈值,则该点为地面点,予以保留;反之则为非地面点,予以剔除。
1.2.2 反距离加权插值构建DEM
滤波后的点云数据存在多处空洞与断裂,极大影响着DEM 的真实性与精度,因此需要对点云模型进行插值。
本文利用反距离加权插值[9](IDW),假定空间待插值点为Q,Q点邻域内散乱点P,利用反距离加权插值法对点Q的属性值ZQ进行插值。其插值原理是待插Zi为邻近区域内所有数据点Z值的加权平均,权重系数与待估点到采样点的距离的k(0≤k≤3)次幂成反比,即随着距离增大,权重呈幂函数递减,且对某一待估点而言,其所有邻域内采样点数的权重和为1。其计算式为

式中,di为待插点与其邻域内第i个点之间的距离。
1.2.3 水库库容计算方法
DEM 作为高程信息与平面信息相互转化的载体,将水库的水位与水域面积的变化从二维空间过渡到三维空间。以最低水面作为初始面,以初始水面高程向上对模型进行切片、排序,统计出相应高程的水位面积。将相邻的空间看作柱体,累加各个部分的面积,得到从初始水位开始的水量体积。测量中断面法常用的库容计算公式为梯形公式和截锥公式,即,

式中,V为水库蓄水体积,i为切片序号,h为切片间隔,Sm为第m层切片的面积。
式(2)为梯形公式,又叫一般计算公式,广泛应用于河槽式河流类型;式(3)为截锥公式,称之为严密计算公式。
水库地形更加符合截锥几何特征,本文可利用式(3)进行计算,蓄水体积计算的原理如图4所示。
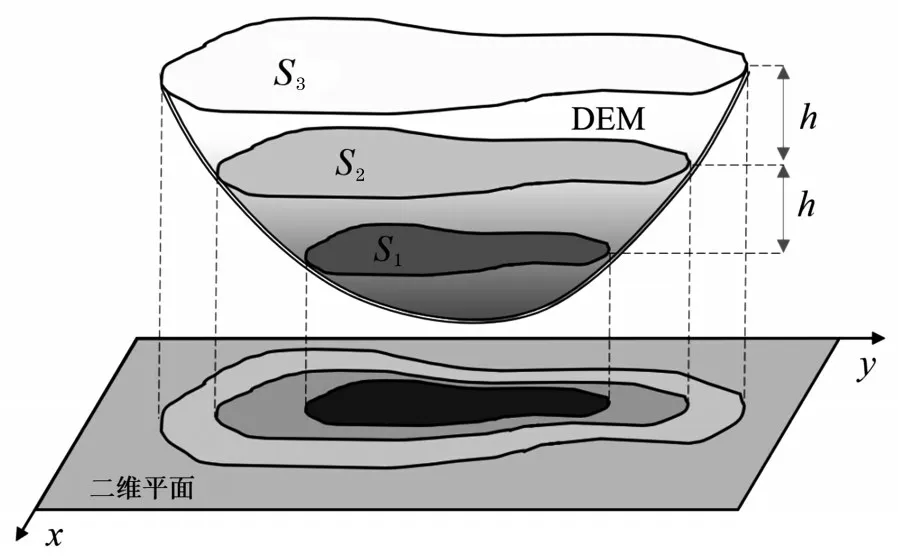
图4 水体积计算原理
2 实验与结果
2.1 试验区选取
研究示范区位于江苏省句容市东北部山区通济河支流,属太湖流域,地势低洼,易受洪涝灾害威胁[10]。水库集水面积24.5 km2,总库容约2 704万m3,属于中型山谷水库,水库主坝坝顶高程59.3 m,校核洪水位57.22 m。水库设计以防洪、灌溉为主,结合水产养殖,并向下游城镇供水。自2001年5月,南京水文自动化研究所安装了自动化水位、雨量遥测系统与水位雨量站,为验证库容曲线提供了参考数据。
2.2 DEM与库容曲线的构建
本研究利用terrasolid2019 软件,基于PTD 滤波后的点云数据,利用反距离插值法建立DEM。设置格网大小为0.1 m,权重为2,半径搜索阈值5 m,计算得到高精度数字高程模型。滤波结果与DEM 构建的结果如图5所示。
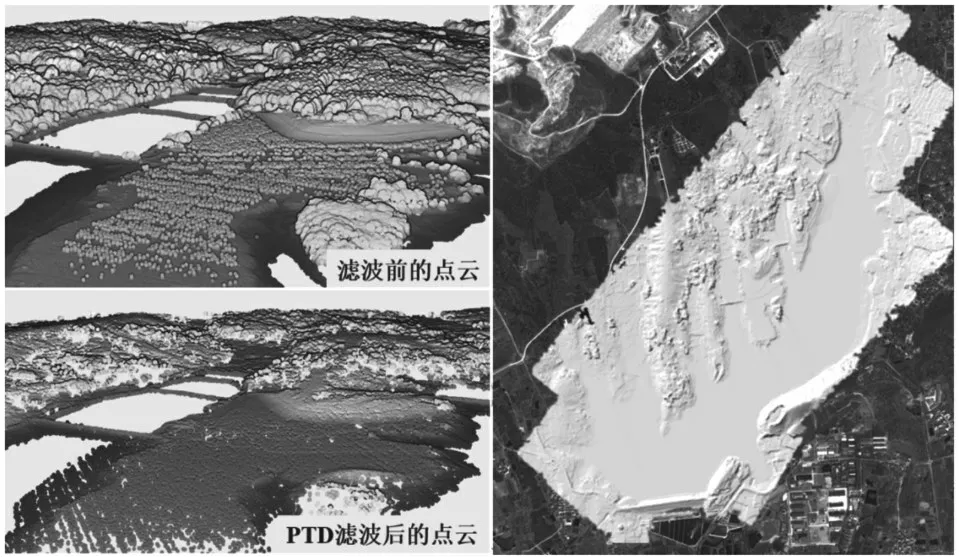
图5 PTD滤波与DEM构建成果
根据仑山水库及周边地形的DEM数据,对模型进行高程提取。提取出不同高程H下的河湖周边模型。利用式(3)计算不同水位高程差H下的蓄水容积Vi。本实验的水位高程设定0.5 m为间隔,利用ArcGIS10.2进行栅格计算获取不同水位下的水域面积。分别计算0.5 m 水位间隔下的水量体积,并将不同水位的蓄水容积Vi依次求和,绘制H-S-V关系模型,结果如图6所示。

图6 水库H-S-V关系模型
2.3 精度验证
为了验证所建水库库容曲线的可靠性,需要对库水位—水域面积—水量体积变化关系进行精度分析。仑山水库建设自动化水位、雨量遥测系统以及水位雨量站,参照水库管理所提供的H-S-V关系表,计算蓄水容积Vi与实际蓄水的差值(DV),以及水域面积Si与实际面积的差值(DS),结果如表1 所示。分析模型在不同水位与实际数据的相似度,判断库容曲线是否可靠。
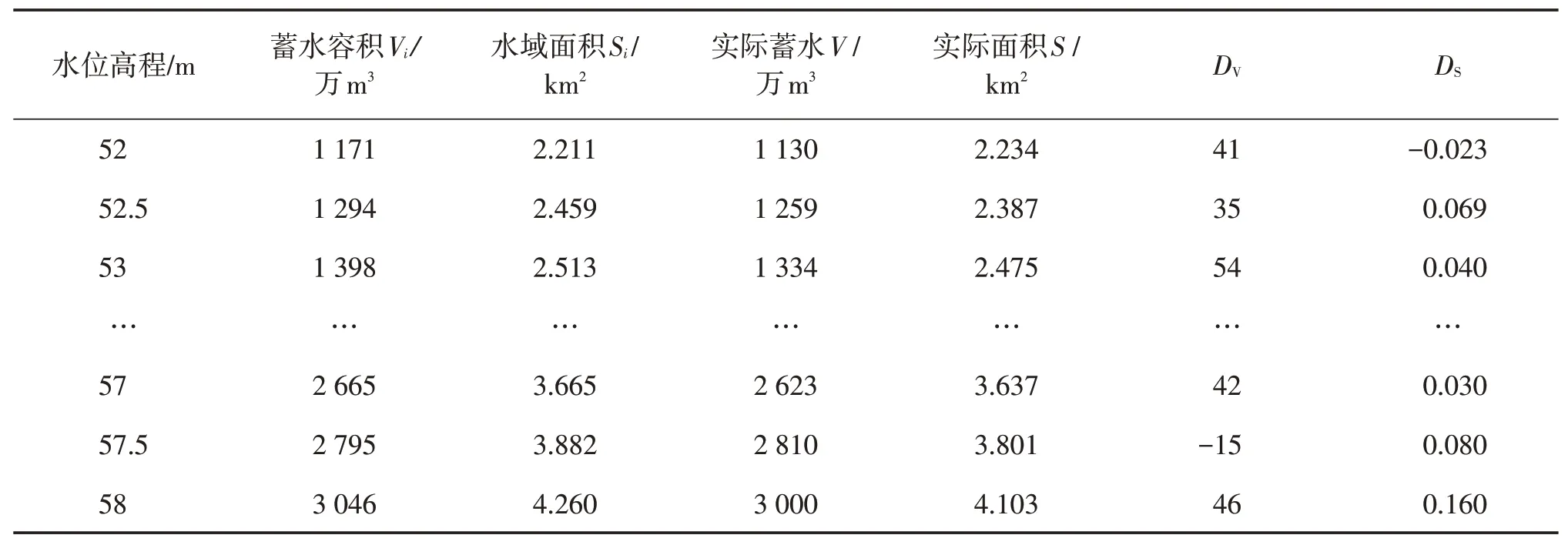
表1 计算模拟结果与实际结果对比
结果表明,计算水域面积与实水域面积相似度最低为96.10%,最高达99.46%,平均相似度为97.32%,误差在可接受范围内;模拟蓄水量与实际蓄水量相似度最低为96.14%,相似度最高达99.46%,平均相似度为97.08%。模拟蓄水量总体相较实际蓄水量偏大,属于合理范围,说明该方法的准确性较高,应用性较强。
3 结 语
本文对仑山水库约10.8 km2的范围展开研究,利用机载LIDAR获取的水库及周边点云数据,基于初始水位建立DEM。通过对水域面积进行提取与水量体积计算,构建从51.3~58 m 水位下的库容曲线。经过精度分析,得到以下结论。
(1)机载LIDAR技术在库容曲线计算相对传统方法,自动化程度高,可视化效果好,提高了测量效率和准确性。
(2)机载LIDAR 未能获取水下的地形数据,因此库容曲线是从获取数据时的水位开始算起。本文采用水量体积计算适用于静态或者水流较为平缓的水库。
(3)基于LIDAR 点云数据建立的三维模型,具有较好的可视化效果,可以模拟水位增长与淹没面积变化对周边环境的影响程度。
猜你喜欢
水利水电快报(2022年10期)2022-11-23
资源信息与工程(2021年5期)2022-01-15
水上消防(2021年3期)2021-08-21
当代陕西(2020年23期)2021-01-07
水上消防(2020年4期)2021-01-04
水上消防(2020年5期)2020-12-14
文史春秋(2019年11期)2020-01-15
消费导刊(2017年8期)2018-01-18
科学与财富(2017年28期)2017-10-14
全球定位系统(2015年4期)2015-02-28