
带相关噪声异步采样系统的分布式最优线性递推融合估计
2022-09-17 07:31孙书利
控制理论与应用 2022年7期
姜 帅,孙书利
(黑龙江大学电子工程学院,黑龙江哈尔滨 150080)
1 引言
随着传感器技术的发展,多传感器信息融合技术已经广泛应用于目标跟踪与识别、故障诊断与医疗等领域.由于异步采样系统能够提供目标更丰富的信息,而引起了国内外学者的广泛关注.目前,多传感器融合算法主要有集中式和分布式两种基本结构.尽管集中式融合具有更高的精度,但鲁棒性和可靠性较差.由于分布式融合具有较好的鲁棒性和可靠性,因而被广泛地应用于工程实践[1].经典Kalman滤波通常假设系统噪声不相关,然而相关噪声普遍存在于实际系统中,如相同的噪声源、广义系统转化为正常系统、带随机滞后和丢包的网络化系统模型转化时可引入相关噪声[2-3].因而,研究带相关噪声异步采样系统的分布式融合估计问题具有重要意义.
目前,对分布式融合的研究已经获得了许多成果.文献[4]针对带相关观测噪声的系统,利用矩阵伪逆和集中式信息滤波器提出了一种分布式Kalman融合滤波算法,该算法与集中式融合具有相同的精度.文献[5]针对带相关噪声的离散时变随机不确定系统,提出了一种按矩阵加权分布式融合滤波器.文献[6]研究了一类带丢失观测、随机传输滞后和丢包系统的分布式融合滤波问题.文献[7]考虑了具有不同数据丢失率多传感器系统的观测加权融合估计问题.对带时间相关乘性噪声的离散随机系统,文献[8]提出了一种按标量加权的分布式融合滤波器.对带未知通信干扰、丢包和乘性噪声的不确定系统,文献[9]提出了一种不依赖未知干扰的分布式融合滤波器.然而,以上文献[5-9]中的分布式融合估计算法都没有考虑利用先验融合估值的信息.近期,文献[10]考虑了一种具有Kalman递推结构的分布式最优线性融合滤波器,它具有精度高和可靠性好等特点.对带随机参数和相关噪声的系统,文献[11]提出了分布式最优线性融合预报器和滤波器,所提出的带反馈的分布式最优线性融合滤波器与集中式融合精度完全相同.然而,以上文献所研究的系统是同步采样的系统,而没有考虑异步采样系统.
对于异步多速率采样系统信息融合估计的研究,文献[12]综述了近年来对多传感器多速率系统的研究方法与进展.文献[13]对带丢失观测的多速率采样系统提出了一种多速率Kalman滤波器.文献[14]利用数据块方法研究了异步非均匀采样系统融合估计问题.对带相关噪声的异步非均匀采样系统,文献[15]应用状态加权的方法解决了异步估计问题.对带相关噪声和不可靠观测的异步均匀采样系统,文献[16]提出了一种基于白噪声估值器的融合算法,有效提高了对不确定系统的估计性能,对带不同衰减观测的异步均匀采样系统,文献[17]提出了按矩阵加权分布式融合滤波器,给出了周期稳态的概念并证明了滤波器的周期稳态特性.对带相关噪声的异步均匀采样系统,文献[18]和文献[19]分别采用迭代状态方程和伪观测的方法实现对异步系统同步化,提出了相应的分布式融合算法.文献[20]研究了带相关噪声和丢包补偿的异步均匀采样系统的分布式融合估计问题.文献[21]研究了观测噪声自相关且与系统噪声的前一时刻相关的异步多速率系统的融合估计问题.文献[22]研究了带相关噪声和不可靠观测多速率系统的异步融合估计问题.然而,以上对多速率系统的融合估计的研究结果大都采用局部估计进行矩阵加权融合方法[5],没有考虑利用先验融合估值[10-11].
本文针对带相关噪声的异步均匀采样系统,应用文献[10]的分布式递推融合算法,提出了分布式递推融合预报器和滤波器.通过引入Bernoulli分布的随机变量将系统同步化,并给出局部估值器.推导了局部估值间的估计误差互协方差阵,以及先验融合估值与局部估值间的估计误差互协方差阵.进而提出了不带反馈的分布式最优线性递推融合预报器和滤波器.然而,所提出的不带反馈的分布式融合估值器与集中式融合估值器相比具有精度损失.为改善估计精度,又提出了带反馈的分布式最优线性递推融合预报器和滤波器,并证明了带反馈的分布式融合估值与集中式融合估值具有相同的估计精度.
2 问题阐述
考虑多传感器异步均匀采样线性离散随机系统

其中:t1,2,3,···,i1,2,···L,T是系统状态更新周期,x(tT)∈Rn为系统在tT时刻的状态,u(tT)∈Rp为系统在tT时刻的控制输入,yi(nitT)∈为系统在nitT时刻的观测输出.Φ,B,Γ,Hi分别为适当维数的常矩阵.w(tT)∈Rr为过程噪声,vi(nitT)∈为观测噪声.系统状态以高速率h0更新,第i个传感器以低速率hi均匀采样,且满足状态更新速率与传感器采样速率的比值nih0/hi为正整数.为了表达方便且不失一般性,令T1.
假设1过程噪声w(t)与观测噪声vi(nit)为零均值相关高斯白噪声,即

其中QviiQvi,δtk是Kronecker Delta函数.
假设2初值x(0)与过程噪声w(t)和观测噪声vi(nit)不相关,且满足

图1给出了系统状态更新与两传感器采样间关系示意图.系统状态以高速率均匀更新,传感器1和传感器2以低速率均匀采样,且有n12和n23.关于此类异步均匀采样系统已得到了广泛研究[17-21].
根据图1可知,传感器在状态更新点处采样主要有以下3种情况:1)所有传感器均在状态更新点处采样,如时刻6;2)传感器1和传感器2只有一个在状态更新点处采样,如时刻2,3,4;3)所有传感器均不采样,如时刻1和时刻5.

图1 状态更新与传感器采样间关系示意图Fig.1 Diagram of state updating and sensor sampling
本文的目的是:对带相关噪声的异步均匀采样系统,基于各传感器的局部估计设计具有Kalman递推结构的分布式线性无偏最小方差融合估计算法,它具有图2所示的融合结构,其中实线表示没有反馈的分布式融合,包括虚线的表示带反馈的分布式融合.

图2 带反馈和不带反馈的分布式融合结构Fig.2 Structures of distributed fusion with/without feedback
3 分布式最优线性递推融合滤波器
3.1 模型转化和预备引理
针对式(1)和式(2)所描述的系统模型,为了便于获得对系统状态的最优估计,首先将异步采样系统转化为传感器均在状态更新点采样的同步系统,即

其中定义yi(t)0,,l1,2,3,···.vi(t)是均值为零、方差为Qvi的高斯白噪声.
通过引入满足伯努利分布的随机变量
那么,本文有如下预备引理.
引理1[11]在假设1和假设2的条件下,系统状态的递推局部Kalman预报器计算如下:

其中新息可以计算为

且有新息方差

预报增益计算为

相应的预报误差方差阵计算为
引理2[11]在假设1和假设2的条件下,系统状态的局部Kalman滤波器计算为

其中局部Kalman滤波增益计算为

相应的局部滤波误差方差阵计算为

注1根据引理1与引理2,当传感器在状态更新点处有采样时,即γi(t)=1,采用局部滤波估值作为当前时刻局部估值.当无采样时,即γi(t)=0,采用基于最近采样时刻的滤波估值的一步或多步预报值作为当前时刻的估值.
引理3[10]在假设1和假设2的条件下,分布式最优线性递推融合状态估值器为

相应的分布式最优线性融合估计误差方差阵计算为

3.2 局部估值间的估计误差互协方差阵
定理1基于引理1和引理2,第i个传感器与第j个传感器间局部预报误差互协方差阵计算为

第i个与第j个传感器的滤波误差互协方差阵计算为
证式(5)减去式(8)并利用式(6)和式(9),可得局部预报误差方程
由x(t)减去式(13)并利用式(6)和式(9),可得局部滤波误差方程
这引出式(21). 证毕.
3.3 不带反馈的分布式融合预报器与滤波器
定理2在假设1和假设2的条件下,基于引理1-3和定理1有如下不带反馈的分布式最优线性递推融合状态预报器:

融合预报增益矩阵Lp(t+1)计算为

其中

相应的分布式最优线性融合预报误差方差阵计算为

其中定义:

Σ(t|t-1)(Pij(t|t-1))是一个Ln×Ln维矩阵,其第(i,j)位置的块元素是局部预报误差协方差阵Pij(t|t-1).先验两步预报误差方差阵计算为

先验与局部预报估值间的估计误差互协方差阵为

证由引理3的式(16)有


其中先验预报估值计算为

将式(33)代入式(32)引出式(25).由引理3可获得式(26)-(28).
由式(5)减去式(33)得到先验预报误差方程
将式(22)进行增广得到

由式(34)和式(37)可以推出先验预报估值与局部预报估值间的估计误差互方差阵为

这引出式(30).由式(36)-(37),不带反馈的分布式最优线性融合预报器与局部预报器之间的估计误差互协方差阵推导如下:

这引出式(31). 证毕.
定理3在假设1和假设2的条件下,有不带反馈的分布式最优线性融合递推状态滤波器

融合滤波增益矩阵Lo(t)计算为
不带反馈的分布式滤波器的滤波误差方差阵为

不带反馈的分布式最优线性融合预报估值与局部滤波估值间的估计误差互方差阵计算为

其中

证由引理3可得式(40)-(43).对式(23)增广可得

这引出式(44). 证毕.
注2由引理3可知,不带反馈的分布式融合预报器和滤波器是将局部预报器和滤波器作为观测数据进行融合处理的.因为估计误差是时间相关的,所以线性最小方差最优估值器不具有式(16)的形式.而本文所设计的是具有式(16)递推形式的线性无偏最小方差估值器.与集中式融合相比,不带反馈的分布式融合预报器和滤波器具有精度损失.为了提高估计精度,下面将给出带反馈的分布式融合预报器和滤波器.
3.4 带反馈的分布式融合预报器与滤波器
本节考虑从融合中心到传感器局部估计存在反馈的分布式融合估计算法.
定理4在假设1和假设2条件下,有带反馈的分布式最优线性融合递推预报器和滤波器为

其中带上标f的项表示带反馈的向量或矩阵.带反馈的融合预报和滤波增益矩阵计算为

带反馈的融合预报和滤波误差方差矩阵计算为


证当局部估值从融合中心获得反馈的预报值(t|t-1)时,根据引理1-2和定理2-3,可立即得到带反馈的局部估值器式(56)-(61)和带反馈的分布式最优线性融合估值器式(48)-(49).
因此,带反馈的局部预报误差方程可以写为

根据式(33)有带反馈的先验预报估值

根据定理2,带反馈的先验预报误差方差阵计算为

带反馈的先验与局部预报估值间的互协方差阵为

分布式最优线性融合预报估值与局部预报估值间的误差互协方差阵可以重新写为
根据式(63)有带反馈的局部预报误差协方差阵为

将式(65)-(68)分别代入到定理2的式(26)-(28)中,整理可得式(50)(52)(55).同理,根据式(46)可以推导出带反馈的局部滤波误差互方差阵


将式(67)(69)代入式(41)-(43)得式(51)(53)-(54).
证毕.
注3由定理4可见,带反馈的分布式融合预报器和滤波器不要求局部估计误差互协方差阵的计算,以及先验融合估计与局部估计互协方差阵的计算.因而,带反馈的分布式融合估计比不带反馈的融合估计具有更小的计算负担.
3.5 最优性分析
这一节将证明带反馈的分布式最优线性递推融合预报器和滤波器与集中式融合预报器和滤波器具有相同的估计精度.为了证明这一结果,首先给出集中式融合预报和滤波算法.
引理4在假设1和假设2的条件下,有集中式融合预报器和滤波器如下:

定理5当和列满秩时,在初值相同的情况下,带反馈的分布式最优线性融合预报器和滤波器与相应的集中式融合预报器和滤波器是数值等价的,即它们具有全局最优性.
证当局部预报器从融合中心获得融合预报反馈时,式(56)可以重写为
对上式增广得到
再将上式代入式(48)中,得到带反馈的分布式最优线性融合预报器的另一种形式
根据式(50)(55)可得

在相同的初始条件下,上式与引理4的集中式融合预报增益Kpc(t)完全相同.进而引出预报估值相同,即
再将式(55)代入式(52)中得到

将式(82)代入式(83)即可得集中式融合的预报误差方差阵式(76),即(t+1|t)Pc(t+1|t).
类似地,可证明带反馈的分布式融合滤波器与集中式融合滤波器是数值等价的. 证毕.
注4定理5证明了带反馈的分布式融合预报器和滤波器与集中式融合预报器和滤波器的数值等价性,即(t+τ|t)=(t+τ|t)和(t+τ|t)=Pc(t+τ|t),τ=0,1.众所周知,当观测增广的系统状态完全能观时,集中式最优融合预报器和滤波器是稳定的.因此,在观测增广的系统能观的条件下,且在局部预报和滤波增益列满秩的情况下,带反馈的分布式融合预报器和滤波器是稳定的.
4 仿真研究
考虑如下的带3个传感器的跟踪系统:

其中:u(tT)0.1 cos(2πtT),过程噪声w(tT)与观测噪声vi(nitT)分别是零均值的相关高斯白噪声,且有vi(nitT)βiw(nitT)+ηi(nitT),其中β15,β24,β33.ηi(t)为零均值的高斯白噪声,且与w(t)不相关.H1H2H3[1 0 0].状态x(t)[s(t)˙s(t) ¨s(t)]T,其中s(t),˙s(t)和¨s(t)分别表示目标在t时刻的位置、速度和加速度.令T0.1 s,n12,n23,n34,Qw0.09,Qη10.25,Qη20.16,Qη30.09.取初值x(0)[0 0 0]T,P00.1I3.仿真步数设置为200.为了表示方便,用LF表示局部估值器,MWFF表示采用的矩阵加权融合算法[5,20-21]获得的融合滤波器,DOLFF表示本文的不带反馈的分布式最优线性融合滤波器,DOLFFWF表示带反馈的分布式最优线性融合滤波器,CFF表示集中式融合滤波器.图3给出了不带反馈的分布式最优线性递推融合滤波器的估计效果图.从图中可以看到,算法能很好地对系统的位置、速度和加速度进行估计.图4分别给出了140步到200步间各个滤波器在进行了100次Monte Carlo实验后,对系统状态估计的均方误差(MSE)曲线对比.从图中可以看出,DOLFF 和DOLFFWF均比MWFF和LF的估计精度更高,且DOLFFWF和CFF具有完全相同的精度.


图3 DOLFF对状态的跟踪效果图Fig.3 Tracking performance of DOLFF for the state
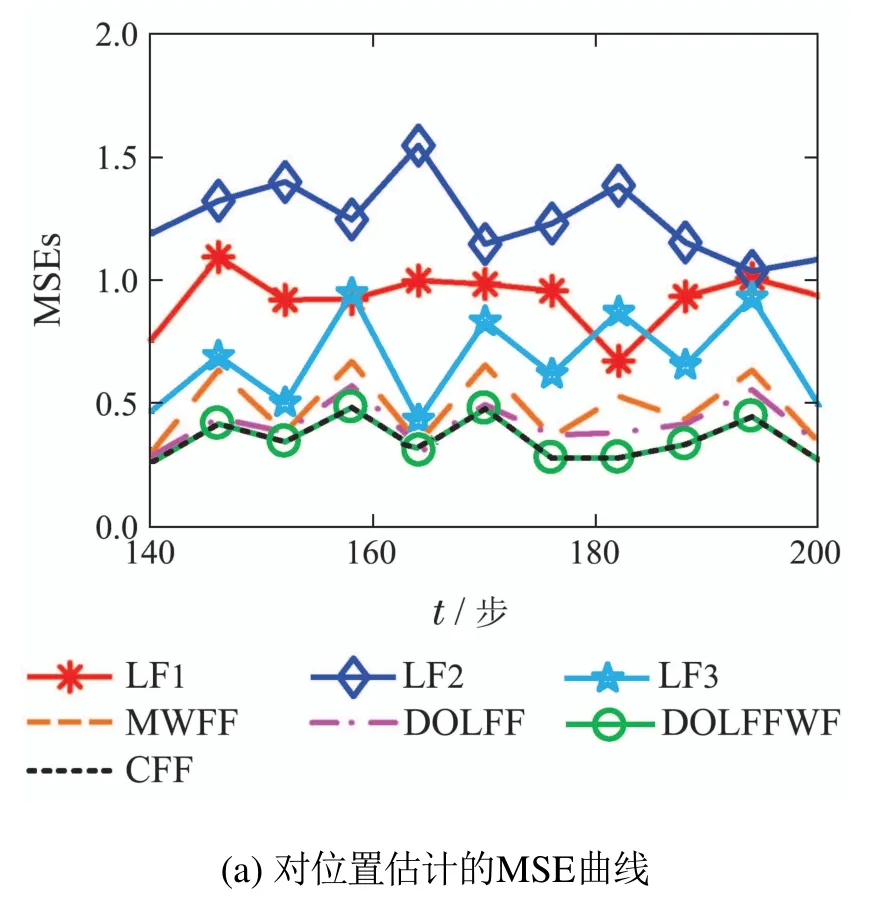

图4 各滤波器的MSE曲线对比图Fig.4 Comparison of MSE curves for different filters
5 结论
本文针对带相关噪声的多传感器异步均匀采样系统,通过引入虚拟观测将系统同步化,提出了一种新的具有Kalman递推形式的分布式线性无偏最小方差最优线性融合预报和滤波算法.与局部估计矩阵加权融合算法相比,所提出的融合算法提高了估计精度.所提出的不带反馈融合算法由于忽略了估计误差的时间相关性,因而具有一定的精度损失.因此,一种带反馈的分布式最优线性融合预报器和滤波器也被提出.在局部估计增益列满秩的条件下,所提出的带反馈的分布式融合估值器具有与集中式融合估值器相同的估计精度.然而,由于通过引入虚拟观测将系统同步化,导致本文所提出的算法要求广义逆矩阵的计算.未来将考虑其他同步化方法,避免广义逆的计算;此外,考虑异步非均匀采样系统的分布式估计问题也是未来需要深入研究的一个方向.
猜你喜欢
中学生数理化·高一版(2021年2期)2021-03-19
铁道通信信号(2020年7期)2020-02-06
电子制作(2019年11期)2019-07-04
中央民族大学学报(自然科学版)(2018年3期)2018-11-09
电子制作(2018年16期)2018-09-26
能源(2018年8期)2018-09-21
卷宗(2018年14期)2018-06-29
电子制作(2018年1期)2018-04-04
汽车零部件(2017年4期)2017-07-12
