
一种改进的相控阵雷达TAS目标跟踪算法
2022-09-21 01:34陈凌,商凯,郑坚
新技术新工艺 2022年7期
陈 凌,商 凯,郑 坚
(南京莱斯电子设备有限公司,江苏 南京 210007)
雷达是现代战场中掌握空情的重要设备组成。传统的机扫雷达是利用机械转动天线系统的方式使波束扫过一定的空域,在天线波束扫过空域时,既对空域进行搜索,也对空域内已发现目标进行跟踪,采用的是TWS(Track While Search)[1],即“边搜索边跟踪”的方式,目标的跟踪数据率与空域搜索数据率一致。由于天线转动1圈需要数秒或数十秒的时间,因此受此限制,目标难以达到较高的跟踪数据率。随着观测对象的发展,如战机机动性能的提升及导弹观测需求[2]等,低数据率机扫雷达已逐渐无法满足目标对象的观测需求。
随着雷达技术体制的发展,出现了一种以电子技术控制阵列天线各辐射单元的馈电相位来改变波束方向的雷达[3],即相控阵雷达,它通过电子方式控制波束,而非传统的机械转动天线阵面方式,相较于传统机扫雷达,相控阵雷达对波束的控制更为灵活[4],可以在空间范围内无惯性扫描[5],因而具备目标搜索、跟踪等多种功能,一个显著特点是TAS跟踪方式。
TAS(Track And Search),即搜索加跟踪的方式[6],目标通过搜索波束发现、起始后,可以通过跟踪波束对目标进行照射、跟踪;目标的跟踪数据率一般高于空域的搜索数据率。根据波束资源及目标特性可以对不同目标设置不同的跟踪数据率:如对威胁程度高、机动性强的目标设置较高的数据率,反之,则设置低数据率,甚至通过搜索波束,即TWS的方式进行跟踪,不占用跟踪波束的资源;对于RCS较小的目标可以增加照射脉冲数,通过多波束联合检测的方式提高目标的检测概率,尽可能发挥相控阵体制雷达波束捷变的优势。
本文主要讨论TAS目标的关联、跟踪算法。
1 传统TAS航迹关联
TAS跟踪一般采用独立通道,相当于单目标跟踪,因此TAS目标的关联、跟踪流程为:接收到TAS点迹后,将其与目标航迹进行关联,判断其是否在波门范围内,若在波门范围内,则进行跟踪滤波,否则做丢点、外推处理;若波门内存在多个点迹,则选择与目标预测最接近的点迹进行跟踪,流程如图1所示。
目标的关联波门根据目标运动特性及探测误差设置,在实际工程应用中,若出现目标连续丢点,会适当扩大关联波门,防止因目标机动或滤波偏差导致目标失跟的情况;但扩大关联波门时,非目标的干扰点可能会进入波门,引起目标错跟。
图2所示为国内某雷达使用TAS模式(跟踪周期约为0.2 s)对某目标的跟踪截图,图2中航迹右侧远距离突出的一小节(圆圈标注)为跟错的情况。经数据分析,跟错原因如下:目标在远距离切向飞行时,观测点消失,在目标同方位距离相差约500 m处存在干扰点,因目标连续丢点,关联波门扩大,目标跟到干扰点上,持续12个跟踪周期,形成了图2中远距离突出的一小节,后因干扰点消失,目标点复现,又重新跟回到目标上。
上述跟错是由于目标点连续多个周期消失,关联波门扩大,干扰点进入关联波门引起;但若不扩大关联波门,则难以应对目标机动等情况。这是相互矛盾的方面。
查阅相关文献资料,基本通过波门的设置来滤除杂波点,文献[7]通过残差统计设置跟踪波门,对抑制跟踪过程中的噪声和野值起到了较好的效果,但难以应对目标突然机动的情况;文献[8]与文献[9]均以最大机动水平设置跟踪波门,并通过量测信息协方差扩大关联门,能很好地应对目标机动,但目标观测点消失时,易跟到附近杂波点上。文献[10]通过设置径向速度波门滤除了更多杂波点,但同样未考虑目标观测点消失的情况。单纯通过波门设置,难以兼顾机动目标跟踪及目标连续消失、附近出现干扰点引起的跟错问题。
本文提出了一种通过提前主动对目标附近干扰点建立航迹,再利用航迹竞争的方法,判断跟踪波门内点迹属于目标还是干扰,对属于干扰的点迹取消其与目标的关联,有效降低目标跟到干扰点上的概率。
2 TAS目标关联、跟踪改进
通常干扰点进入目标跟踪波门前会与目标共存若干个周期,在这段时间内,通过多周期关联,对干扰点建立航迹,形成干扰航迹,后续对目标跟踪波门内的点迹进行关联时,比较点迹与目标以及点迹与干扰航迹的关联程度,若点迹与干扰航迹关联度更高,则取消该点迹与目标的关联;在剩余与目标关联度更高的点迹中,选取最优匹配点作为目标的跟踪点,若无与目标关联度更高点迹,则对目标进行丢点、外推处理。
在进行点航关联度计算时,为了更好地区分点迹属于目标还是干扰,以及各点迹与目标的关联程度,在传统方位、距离关联基础上,增加仰角、幅度、径向速度(测速雷达[11])及方位宽度、距离宽度等回波特征信息的关联,将这些多维特征信息的关联结果按一定权重加到方位、距离关联计算中,形成综合统计距离,依据综合统计距离对点迹的隶属度进行判定,提升点迹关联的准确性。计算综合统计距离时,各特征的权重依据雷达系统对各特征的探测误差及置信度进行设置。点航关联距离计算式如下:
Z=a1(P预-P点)2+a2(Q预-Q点)2+a3E关联+
a4M关联+a5V关联+a6W关联+a7R关联
(1)
改进的TAS关联、跟踪流程如图3所示。
为了提前对干扰建立航迹,但又不过多增加计算量,通常设置一个比目标跟踪波门略大的“干扰关联波门”,对该波门内的干扰点建立“航迹”,并和目标航迹一样进行更新、滤波等,当干扰航迹离开“干扰关联波门”时,即进行撤销、删除处理,节省系统资源。
3 TAS跟踪改进算法效果
采用改进后的关联、跟踪方法对前述某雷达TAS点迹进行重新跟踪,效果如图4所示。
从图4可以看出,目标跟踪轨迹中没有了原航迹(见图2)中因持续12个周期跟到干扰点上产生的那段类似于“尾巴”的错误轨迹,表明目标在远距离处未因观测点持续消失、干扰点进入关联波门而跟错,并且在目标观测点复现时即跟到了目标上,而原航迹由于干扰点消失才跟回目标上,干扰点消失晚于目标观测点复现2个周期,即改进后目标多跟踪了2个周期的正确点迹。
采用传统算法,目标在远距离处持续12个周期跟在干扰点上,即跟错了12个点,而采用改进算法后目标全程跟踪稳定,没有跟错情况,并且比传统算法多跟踪了2个周期的正确点迹。改进算法与传统算法比较见表1。
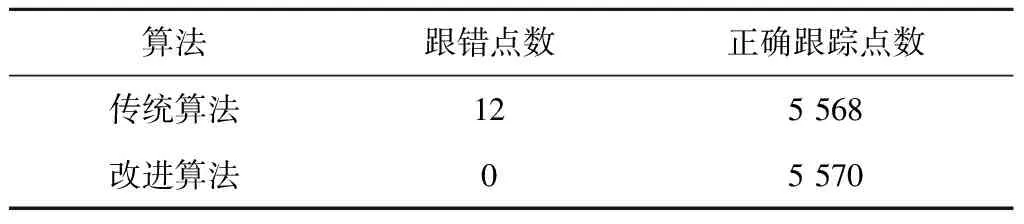
表1 改进算法与传统算法比较
从表1可以看出,改进算法提高了目标正确跟踪的点数,减少了跟错的点数,表明改进算法有效提升了目标跟踪的准确性与稳定性。
值得一提的是,该改进算法对相控阵雷达TAS跟踪双批或多批编队目标及空战情形同样具有适用性,即通过将目标临近范围内其他目标建立“航迹”,作为目标的“干扰航迹”,利用航迹竞争方式对点迹归属进行判别,可以有效降低目标航迹跟到其他目标上的概率,提高目标跟踪的稳定性。
4 结语
本文基于机动目标跟踪对波门的需求及波门扩大引起的跟错问题,提出了一种通过提前对干扰点建立航迹,利用航迹竞争方式滤除干扰点的方法,在保持机动目标跟踪能力的同时,提高了目标跟踪稳定性,并通过多特征信息提高关联的准确性,采用实测数据对算法有效性进行了验证。该算法对TWS航迹跟踪亦具有借鉴意义。
猜你喜欢
北京航空航天大学学报(2022年7期)2022-08-06
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
信息通信技术(2022年2期)2022-05-31
现代农村科技(2021年2期)2021-03-15
成都信息工程大学学报(2021年6期)2021-02-12
数字海洋与水下攻防(2020年6期)2020-12-25
雷达科学与技术(2020年4期)2020-09-11
舰船科学技术(2020年3期)2020-04-22
绿色科技(2019年12期)2019-07-15
