
一种新型水下垃圾打捞机器人设计
2022-10-12 08:05郭志明陈子暄戴娟龚雄曾广胜
长沙大学学报 2022年5期
郭志明,陈子暄,戴娟,龚雄,曾广胜
(长沙学院机电工程学院,湖南 长沙 410022)
随着工业化和城市化进程的推进,海洋环境污染问题也越来越严重,绝大部分陆地垃圾污染物通过各种途径最终进入海洋。这些有害物质进入海洋环境而造成的污染,会损害生物资源,危害人类健康。据估算,每天约有八百万件垃圾被排放到海洋中,预计到2025年,海洋塑料垃圾的数量相比2010年将增加一个数量级[1]。当前海洋环境中的垃圾以塑料垃圾为主,由于塑料垃圾在水中难以自然降解,进入海洋中的塑料垃圾至少能够保留数百年,不仅会威胁海洋环境,还会逐步进入食物链中,对生物资源造成巨大危害[2-3]。
目前针对水下垃圾的清理方式主要包括人工打捞和机械打捞[4]。人工打捞不仅成本高、效率低,还具有一定的危险性。而机械打捞则主要是以垃圾清理船为主的机械产品在人工的遥控指挥下进行清理。例如刘伯运等研制的MC120号水面清洁船,采用双螺旋筒式推进装置,可通过远程遥控的方式实现对水面垃圾的快速清理[5];严苏豫等设计的一种水上垃圾清理船,可通过垃圾收集装置实现对油类垃圾和固体垃圾的分类清理[6];张国洲等研发的双体船式水面垃圾清理机器人,依靠水泵提供动力,使垃圾自动流入舱体,实现水域清理[7]。
上述垃圾清理船主要适用于近海、江河等水域中,体积较为庞大,制造成本较高,难以应用在中小型水域中。因此,为机动解决湖泊、池塘等中小型水域中垃圾污染的问题,我们设计了一款新型水下垃圾打捞机器人。该机器人三维结构如图1所示,采用了框架式外形设计,搭载了胶囊式耐压舱、图像采集装置等,能够快速高效地执行水下作业,针对中小型水域中的塑料垃圾进行准确识别和打捞。
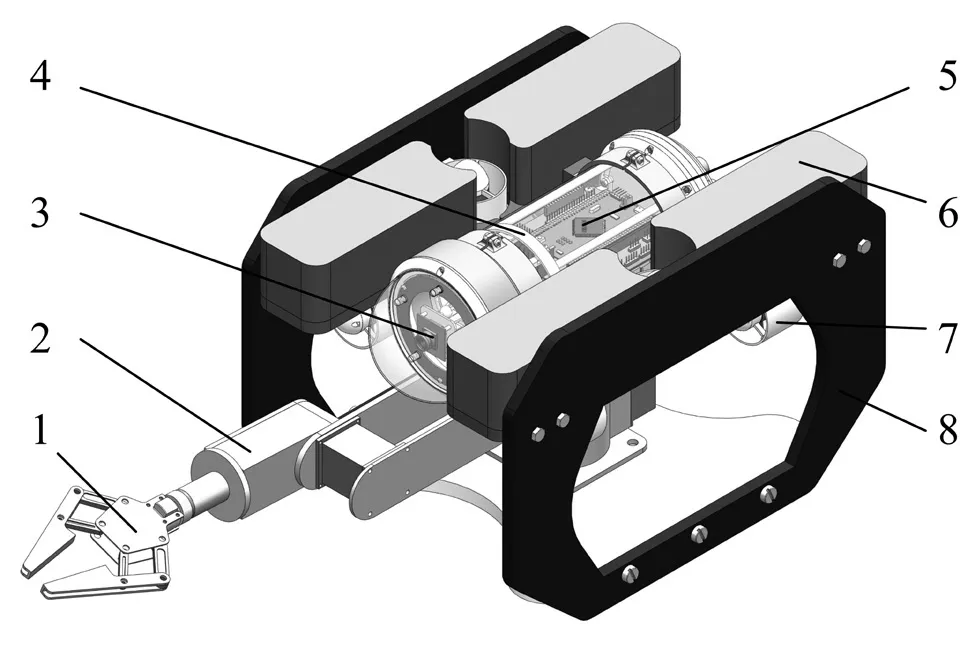
图1 水下机器人三维结构
1 机器人整机结构设计
我们所设计的水下打捞机器人在外形上采用了框架式概念设计,总长684 mm,总宽275 mm,总高256 mm,主要由水下驱动装置、图像采集装置、水下打捞装置以及胶囊式耐压舱构成(见图1)。
为了防止机器人在工作过程中出现损坏,电子控制模块和照明等元器件被安装在胶囊式耐压舱中,耐压舱固定在框架中心。耐压舱前端安装了摄像头,用于提供工作视野,后端设计了脐带缆接口,在工作时可通过脐带缆与母船进行连接,从而进行远程控制与数据传输。耐压舱的正下方安装了水下打捞装置,包括一个三自由度水下机械臂,可进行大范围转动,同时在机械臂末端装配了夹持式机械手,可实现对水下垃圾的打捞清理。
在机器人的工作过程中,我们首先在母船上通过耐压舱后端连接的脐带缆向控制模块发出信号使推进器启动,保证机器人平稳下潜,调整作业深度后,开启耐压舱前端的摄像头进行水下图像采集,必要时可启动摄像头周围的LED灯环进行补光,采集到的图像信息可通过尾部的脐带缆传输给水面上的母船。当发现需要打捞的垃圾时,母船向控制模块发出信号,控制机械臂运动至合适位置,指挥机械手进行抓取,成功抓取垃圾后,再控制机器人上浮至水面进行垃圾回收。
我们通过调整机器人自身重量、浮力和推进力等影响因素,确保机器人在水下处于相对平衡状态,从而能实现平稳运动。由于机器人整体上配置了较多机械结构装置,自身重力较大,易沉入水中,需要选择合适的材料来产生浮力。我们采用轻质、高强度材料制作耐压舱,这样可以有效增加机器人的浮力,但若只用耐压舱的壳体产生机器人的浮力,必然要增加壳体体积,增大流动阻力,因此要在机器人框架式结构上布置合适的浮力材料。
目前大部分机器人采用人工合成的固体材料来提供浮力,这主要是将玻璃微球以一定比例填充到环氧树脂中,在合适的温度、压力下经反应合成的复合材料。相比于其他浮力材料,这种材料密度低、承受静水压强能力好、弹性模量与海水相近。我们所设计的新型垃圾打捞机器人根据工作环境与水深条件,选用牌号为CFC-400的固体材料,布置在耐压舱周围,为机器人提供必需的浮力。该材料主要参数如表1所示。

表1 浮力材料参数
2 机器人关键部件设计
2.1 胶囊式耐压舱设计
机器人在水下作业的过程中会受到静水压力和流动阻力等多种载荷。耐压舱作为主要承压部件,能够保护电控模块,为机器人在水下作业提供密封和安全保障[8],因此需要设计合理的耐压舱结构,保证机器人水下工作时的安全。
图2为机器人耐压舱的结构,为了减少流动阻力,同时最大程度利用内部空间,耐压舱外形采用胶囊式结构,即采用圆柱形内部舱室与半球形封头组合。在舱室前端采用了螺栓将前透明罩、前部支架与前圈固定,后端采用螺钉将后圈、尾部支架、尾盖固定。

图2 水下机器人耐压舱结构
舱室内部安装了支撑杆与环形支架,可承受较大静水压力和撞击力等,有效提高了舱体的结构强度。圆柱形舱室设计了半圆形凹槽,并装配了O形密封圈进行旋转密封,以保证内部控制模块能够正常工作。
2.2 水下驱动装置设计
为保证机器人在水下正常推进和沉浮,同时补偿机械手在工作过程中产生的扰动使其保持稳定,必须配置高效可控的驱动装置。我们设计的机器人的驱动装置主要由耐压舱周围布置的水下推进器和中间的控制模块组成,如图3所示。机器人总共有6个水下推进器,在外部框架上成对布置,通过推进器之间的协同作用使机器人在水下完成不同动作。其中,推进器3、4垂直安装在耐压舱两侧,当它们以相同速度转动时,机器人可实现上浮、下沉动作,差速转动时可实现翻转动作;推进器1、2、5、6水平安装在机器人框架下方,当它们以相同速度转动时,机器人可实现前进、后退,差速转动时可实现机器人的转向。考虑到制造难度和应用场景,我们选用了螺旋桨式推进器。每个推进器的内部都安装了直流电机,通过控制电机的正反转即可实现螺旋桨顺时针、逆时针的转动。

图3 水下推进器布局
2.3 图像采集装置设计
机器人的图像采集装置主要由耐压舱前部的摄像头、二自由度云台、LED灯环组成。摄像头用于拍摄水下杂物,LED灯环用于补光,二自由度云台则用于改变摄像头的拍摄角度,减小工作时的视野盲区。
传统的水下机器人往往采用固定式摄像头的设计,通过控制机器人的移动来采集图像。这样的设计对机器人的运动控制系统要求较高,并且摄像视野有限,在实际应用中易出现较大的视野盲区。而云台可使摄像头绕固定轴线转动,为机器人提供更广泛的视野。考虑到耐压舱的内部空间有限,一般的云台难以放置[9],我们设计了一种新型二自由度摄像云台,如图4所示。
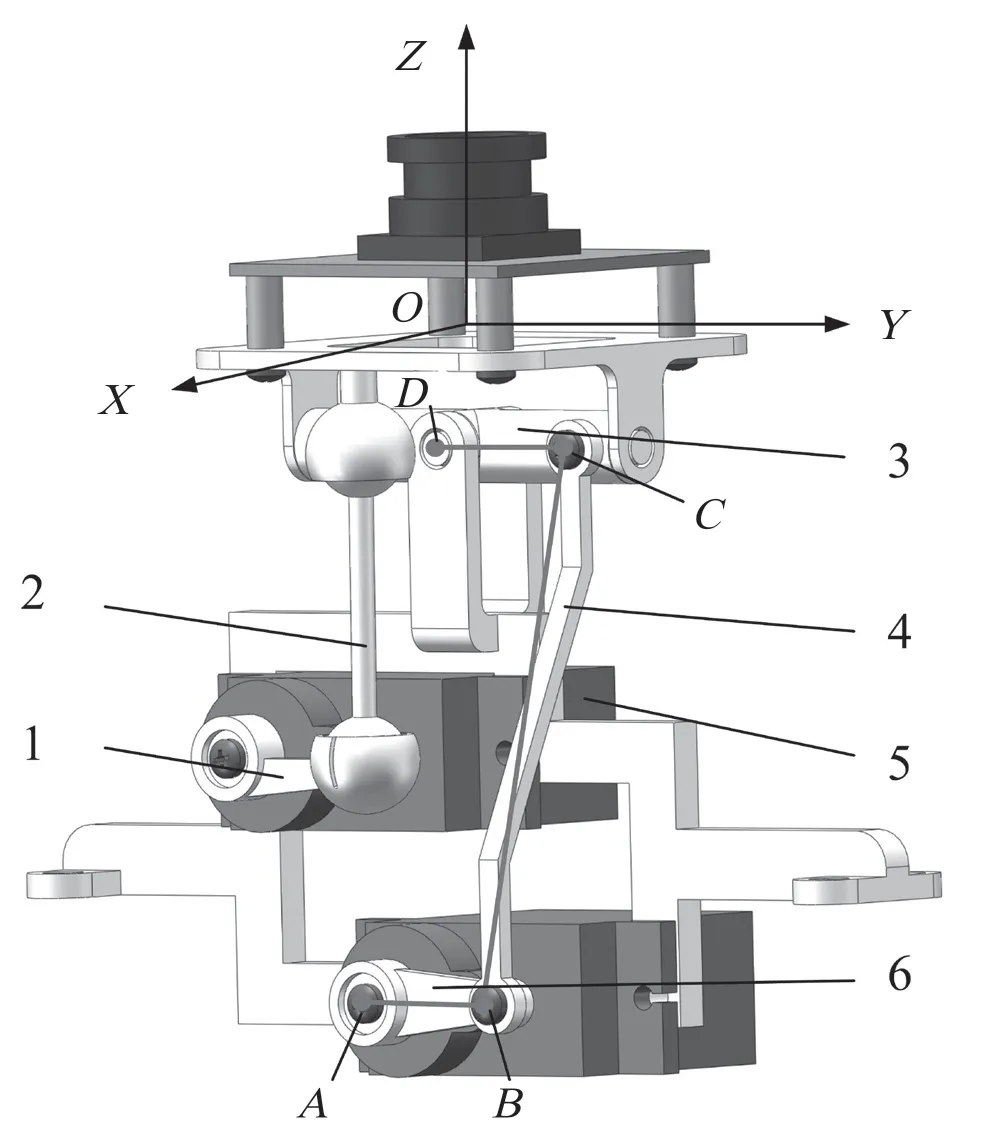
图4 二自由度摄像云台结构
为保证摄像头能够实现复杂的空间转动,我们采用机构学中并联机构的形式进行设计,即将动平台(摄像头)与定平台(机架)采用两个独立的运动链相连接。如图4所示,摇杆3、连杆4、下曲柄6之间通过铰链连接,在平面上组成曲柄摇杆机构,通过舵机驱动下曲柄6的转动可实现摄像头在YOZ平面上进行90°摆动。为避免发生运动干涉,在上曲柄1与连架杆2以及摄像头平台之间均采用球面副连接,通过舵机驱动上曲柄1的摆动即可实现摄像头在XOZ平面上进行90°摆动。水下机器人在实际应用中,可以通过控制上曲柄1与下曲柄6的协同作用,使摄像头完成复杂的空间运动,进一步减少其视野盲区。
由于摄像头的摆动幅度与各杆长度有关,为保证摄像头的摆动幅度尽可能大,获得更大的工作视野,需要确定各杆最优长度。下面将对组成摄像云台的两个独立杆组的尺寸进行计算分析。
2.3.1 下曲柄、连杆、摇杆长度计算
图5即为二自由度摄像云台中下曲柄6、摇杆3、连杆4组成的曲柄摇杆机构运动示意。假设其中,曲柄AB为原动件,在其转动一周过程中会出现两次曲柄AB与连杆BC共线的情况,此时摇杆CD分别处于两极限位置C1D和C2D,原动件AB所在两个位置之间所夹锐角θ为极位夹角,摇杆CD所在两个极限位置之间所夹角φ为摆角。由图5中几何关系可知:
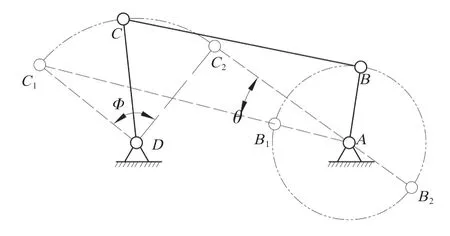
图5 摄像云台中的曲柄摇杆机构运动示意
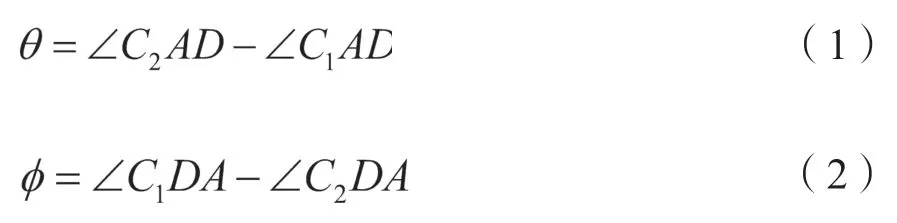
即有:
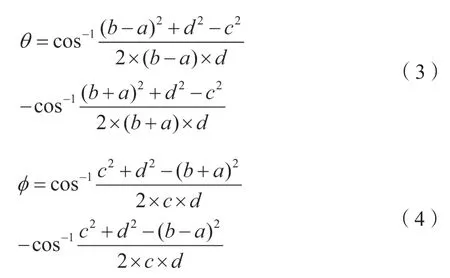
曲柄摇杆机构具有急回运动特性[10],则有:

其中,K为行程速比系数,θ为极位夹角。极位夹角决定着机构的急回运动特性。θ越大,K越大,急回运动越明显,摄像头摆动效率越高,所以在设计过程中应保证极位夹角尽可能大。
在图5所示机构ABCD中,令lBC为最长杆,lAB为最短杆,摇杆lCD= 17.5 mm,机架lAD= 55 mm。为满足曲柄摇杆机构的杆长条件,则有:

同时为保证lCD能够在平面上进行90°往复摆动,摆角φ取为90°,带入式(4)中,得:

通过MATLAB编程计算满足杆长条件式(6)以及摆角约束式(7)时,当lAB= 10.1 mm,lBC= 47.6 mm时,极位夹角θ达到最大,为17.6°。此时,lCD摆动效率最高。
故 图4中,l下曲柄=10.1 mm,l连杆=47.6 mm,l摇杆=17.5 mm。
2.3.2 上曲柄、连架杆长度计算
在摄像云台的实际装配中,图4中的上曲柄与下曲柄均作为舵机摇臂,由舵机直接驱动。为保证设计简便,设定舵机摇臂长度相同,即l上曲柄=l下曲柄=10.1mm。由于空间连杆运动的复杂性,难以直接求解杆长,故通过SolidWorks对摄像云台结构进行建模,通过模拟分析得到连架杆长度。经不断建模优化后最终确定,l连架杆=33.7 mm时,可使摄像头在另一垂直平面上进行90°往复摆动。
综上可得到摄像云台各构件尺寸,如表2所示。
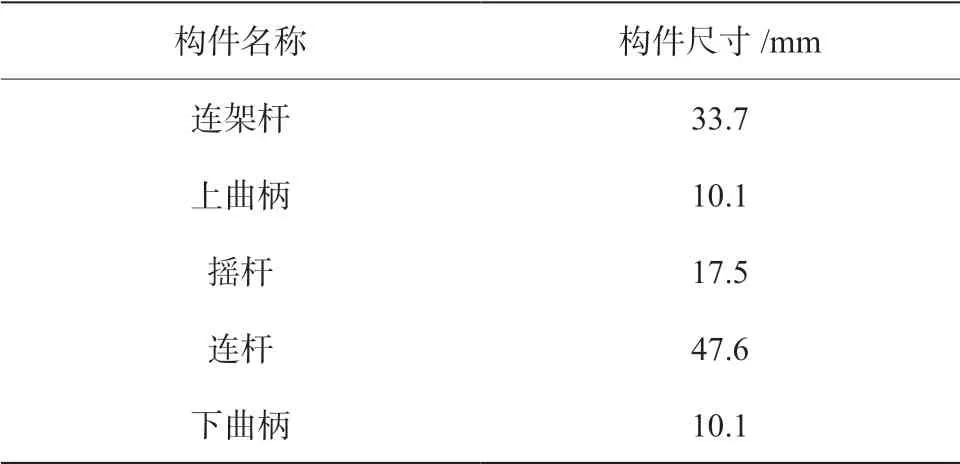
表2 摄像云台各构件尺寸
2.4 水下打捞装置设计
机器人的水下打捞装置主要由三自由度水下机械臂和末端的夹持式机械手组成。机械臂是水下打捞装置中重要的运动机构,通过各关节的转动配合调整机械手的位置,再通过控制机械手的夹持实现对物品的打捞。
为了将机械手运动到指定位置,水下机械臂需要具备一定的自由度。我们综合考虑选择了“4功能”,即“三自由度+机械手”组成的水下机械臂作为设计目标。如图6所示,水下机械臂主要由基座5、大臂4、小臂2以及末端的机械手1组成。在基座处安装了直流伺服电机,使大臂以及之后的部分能在X1O1Y1平面上转动。同样地,在大臂间的套筒内部以及小臂内部也安装了直流伺服电机,使小臂及之后的部分能在X2O2Z2平面上转动、机械手能绕着Z3轴转动。

图6 机械臂结构
机器人的机械臂中各关节转动角度参数如表3所示。

表3 机械臂各关节转动参数
为保证机器人的顺利作业,我们在机械臂末端安装了一个夹持式机械手。如图7所示,机械手末端安装了驱动电机8,通过电机固定座7与丝杠相连,丝杠带动传动螺母5沿着丝杠轴线直线运动,再带动连杆6转动,从而实现折杆1的摆动。由于折杆1、机械手指3、连架杆2构成平行四边形机构,折杆1摆动时,连架杆2会进行同步摆动,从而驱动机械手指3实现平行对捏运动。
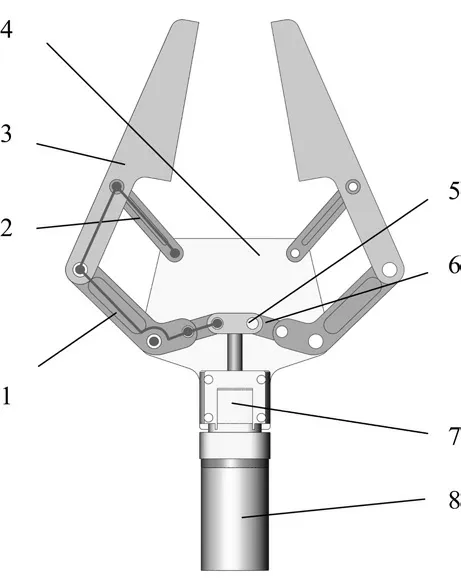
图7 夹持式机械手结构
考虑到机械手结构上的对称性,只需对其左侧机构进行分析即可确定机械手各杆长度及运动参数。
图8为机械手左侧机构运动示意,图中机构可视为偏心曲柄滑块机构与曲柄摇杆机构的串联,其中滑块为主动件。为保证机械手指能够实现平行对捏运动,在上方曲柄摇杆机构中,令,使之成为平行双曲柄机构。在下方偏心曲柄滑块机构中,取偏距为如图8中虚线表示机械手指在运动过程中的初末位置,铰链E运动的水平距离X即为单个机械手指的捏合距离。
所以,上述几何参数应满足关系式:

令e=5 mm,lAB=a=10 mm,lBC=b=15 mm,机械手捏合2距离H=60mm则代入上式可得,摆动角度θ2= 84.7°,lAD=lEF=l2= 33.1 mm。由上方推导知l1大小不影响捏合距离与摆动角,为保证结构的合理性,取lAF=lDF=l1= 30 mm。
综上分析可得,图7所示夹持式机械手最大张开距离为60 mm,最大摆动角度为84.7°。
3 结论
我们针对当前海洋塑料垃圾污染问题,设计了一款新型胶囊框架式水下垃圾打捞机器人,主要包括胶囊式耐压舱、螺旋桨式推进器、宽视野摄像装置和抓取执行机械手。此外,基于机械原理对摄像云台和机械手机构进行了运动分析。主要结论如下。
(1)设计的机器人可实现水下的前进、后退、上浮、下沉、翻转等运动,有效提高了机器人的灵活性。通过将摄像头与曲柄连杆机构和球面副连杆并联,设计了一种二自由度摄像云台,使摄像头能够在两个垂直平面内完成90°摆动,有效减少了水下机器人工作时的视野盲区。
(2)水下打捞装置主要由三自由度机械臂与夹持式机械手组成。机械臂的各关节能在一定角度内转动,从而使机械臂实现大范围的空间摆动。在机械臂的末端安装了机械手,能够配合摄像装置实现对水下垃圾的识别和清理打捞。通过对机械手机构的运动分析,可得机械手最大张开距离为60 mm,最大摆动角度为84.7°。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
舰船科学技术(2021年12期)2021-03-29
南方农机(2021年3期)2021-02-07
中阿科技论坛(中英阿文)(2020年2期)2020-05-27
新商务周刊(2017年5期)2017-10-16
世界博览(2017年1期)2017-04-19
中国新技术新产品(2015年3期)2015-07-19
中国自行车·骑行风尚(2014年2期)2014-05-07
汽车与新动力(2013年6期)2013-03-11
