
一种摇臂路侧停车位清扫设备与自动控制*
2022-10-28 04:26谷春山徐利奇孙晨阳崔华胜
机械工程与自动化 2022年5期
谷春山,徐利奇,孙晨阳,崔华胜
(北京市城市管理研究院,北京 100028)
1 系统概述
随着北京市车辆保有量的增加,路侧停车影响道路清扫保洁作业的现象逐渐增多,矛盾日益显著。路侧停车位[1]处污染严重,现有作业设备均无法有效清洁,当路侧停车离开后,污染物暴露严重影响市容美观,也可能造成扬尘污染。本文介绍了一种利用一根可伸缩的摇臂,伸入车辆下方,并做扇形摇摆,一边摇摆一边回缩,从而实现对停车位的清扫。其具体操作如下:可伸缩的摇臂带动吸尘头伸入到车辆下方,碰到路缘石或达到伸缩极限为止,随后吸尘头吸尘的同时摇臂左右摆动,完成一个扇形轨迹后,摇臂回缩一定距离,然后再次进行左右摆动,如此循环直至摇臂全部收回,完成一次停车位的清扫。通过实现摇臂的自动化控制,该路侧停车位清扫保洁设备在基本保证覆盖范围及作业速度的基础上,降低了整机成本及操作难度,更加具备使用价值,从而针对性地解决了路侧停车位这一特定场景的清扫保洁问题。
2 设计思路与方案
我们使用一根专门设计的链排作为摇臂,该链排不进行清扫时卷在一个卷筒上,清扫作业时伸出,伸出后链排各节间通过弹簧销轴自动锁定,形成一个具有一定刚性的支臂,作业完成后链排回收,此时由挡块将弹簧销轴压回,使链排恢复可弯曲状态,并重新盘卷在卷筒上。链排前端安装1个吸尘头,该吸尘头使用1台电机驱动1个全向轮,伸出时全向轮不旋转,被动滚动,到位后电机驱动全向轮[2]滚动,带动链排摇摆完成清扫。
3 清扫设备结构及电控设计
根据链排结构方案对清扫设备进行了详细设计,包括样机机械结构设计和电控设计。
3.1 机械结构设计
根据初步技术方案,机械结构主要包括吸尘小车1、链排摇臂2、卷筒机构3、升降机构4,如图1所示。

1-吸尘小车;2-链排摇臂;3-卷筒机构;4-升降机构
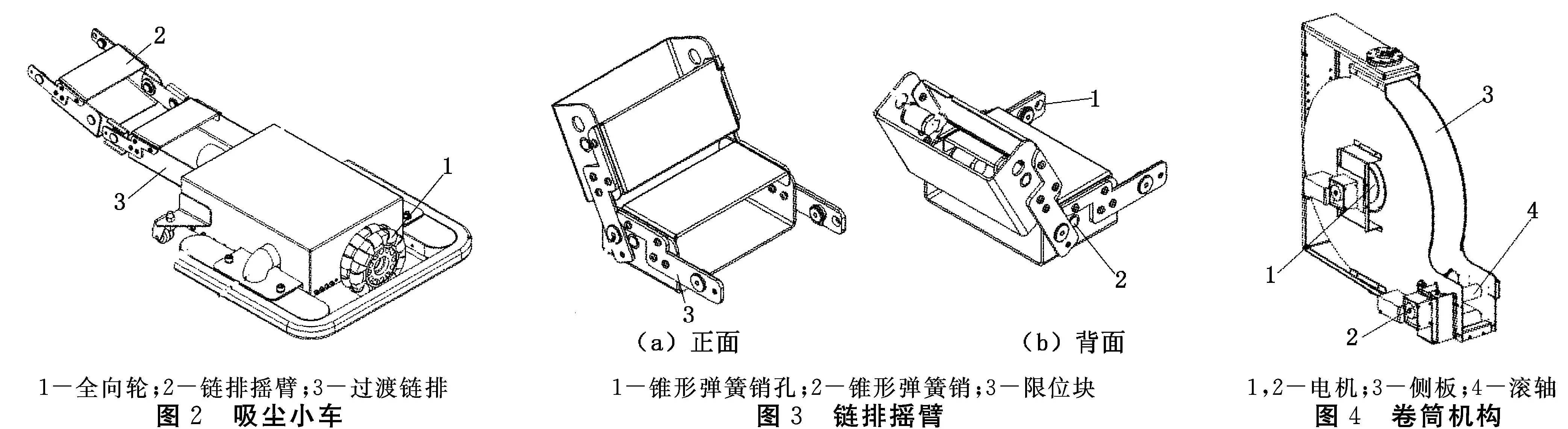
3.1.1 吸尘小车
吸尘小车如图2所示,摇臂方案所用吸尘小车使用一个全向轮1,该轮由两组小滚轮组成,每组小滚轮固定在一个轮盘之上,两组轮盘交叉固定,确保在全向轮滚动时至少有一个小滚轮与地面接触。当全向轮不滚动时,如果受到轴向推力,由于有至少一个小滚轮与地面接触,全向轮可以依靠小滚轮的滚动而沿轴向顺畅移动;在全向轮后安装驱动电机,用于驱动全向轮主动转动,并带动链排摇臂2在地面上摆动。底板后方安装1节过渡链排3,用于连接链排摇臂。
3.1.2 链排摇臂
链排摇臂是清扫设备的核心部分,它由多节链节组成,链节之间由销轴连接,链排盘绕在卷筒机构上,一端固定在卷筒机构的侧板上,另一端连接吸尘小车。链排结构设计为只能向一个方向弯曲,另一个方向有限位块3,限位块3上还设计有锥形弹簧销孔1,如图3所示。链排侧面设计有锥形弹簧销2,当链排伸出时,卷筒机构的导向筒使链排伸出部分达到水平状态,此时弹簧销滑入弹簧销孔,在一定程度上限制链排弯曲,使链排保持为平直状态架在卷筒机构导向筒与吸尘头之间,避免拖地。链排中间穿有吸尘软管、吸尘头电机电源线以及吸尘头上各碰撞开关线缆。
3.1.3 卷筒机构
卷筒机构如图4所示,它由旋转板、侧板3、衬板、桶芯、电机1、电机2、滚轴4等组成。侧板3及桶芯形成特定空间,限制链排中弹簧销伸出,使得链排的各个链节可以转动。当链排离开卷筒机构时,滚轴将链排压平,链排中弹簧销对准弹簧销孔,当链节离开卷筒机构后,弹簧销不再被侧板限制而弹出,插入弹簧销孔实现锁定。减速电机1与内置桶芯连接,可带动桶芯旋转使链排盘卷在桶芯上,实现链排回收,减速电机2与链排滚轴连接,电机带动滚轴旋转,滚轴推动链排向外运动实现外放,链排的收放带动吸尘小车实现前后移动。
3.1.4 升降机构
升降机构如图5所示,由升降导柱1、升降滑块2、卷筒机构安装板3、升降电推杆4、升降框架5、平移安装板6、平移滑块7、平移导轨8、主体框架9、平移电推杆10及扫路机连接板11组成。卷筒机构主体支架安装在卷筒机构安装板上,通过升降电推杆带动,可实现卷筒机构(含链排摇臂及吸尘小车)沿升降导柱及滑块上下运动。升降框架与平移安装板连接,通过平移电推杆带动,可实现卷筒机构(含链排摇臂、吸尘小车及升降部分零部件)沿平移导轨及滑块水平运动,完成作业部件水平收放。
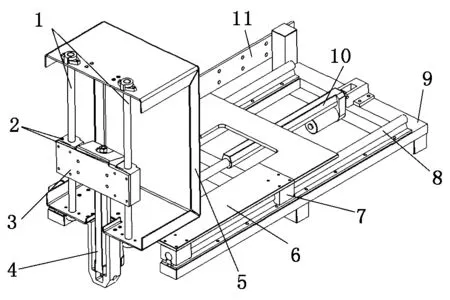
1-升降导柱;2-升降滑块;3-卷筒机构安装板;4-升降电推杆;5-升降框架;6-平移安装板;7-平移滑块;8-平移导轨;9-主体框架;10-平移电推杆;11-扫路机连接板
3.2 电气系统框架
根据链排摇臂机构结构特点,选择一台PLC(三菱FX3GA-60MT)[3]作为控制核心,需实现的动作包括:手动伸出链排摇臂、手动收回链排摇臂、手动向左摆动链排摇臂、手动向右摆动链排摇臂、手动升起卷筒机构、手动降下卷筒机构、自动运行摆动循环。
3.2.1 电气元件
电气元件主要包括1台PLC、2个链排步进驱动器[4](包括伸出和收回)、小车步进驱动器、220 V转48 V直流电源、220 V转24 V直流电源、220 V转5 V直流电源、接触器及按钮等。
3.2.2 自动化编程
通过对电气元器件进行接线,制作了一个简易的控制板,如图6所示。

图6 电气控制板
组装完电气元器件后,通过三菱PLC软件GX Works2编写程序[5],下载到三菱FX3GA-60MT里,点动按钮实现手动动作后,点击自动启动实现自动动作。PLC程序如图7所示。

图7 PLC程序
3.2.3 样机及功能测试
为验证样机是否能够完成所需的摇臂伸出、摆动、吸尘的动作,项目组对其进行了功能性测试,包括作业时间、作业面积及尘土吸净率,测试情况如图8所示。

图8 样机性能测试情况
性能测试结果表明:摇臂方案样机平均单次作业面积7.96 m2,而单个车位总面积约为13.25 m2,因此单次作业车位面积覆盖率为60.1%,大于60%,达到了项目指标要求;单车位平均作业时间约3′25″,小于4 min,达到了项目指标要求;平均尘土去除率88.7%,大于70%,达到了项目指标要求。
项目组还对改进后样机进行了车下实际作业测试,结果表明,改进后样机可以很好地完成车下清扫任务,基本达到预期设计需求。
4 结语
本文介绍了一种摇臂式路侧停车位清扫设备,设计了控制系统,实现了吸尘小车、链排摇臂、卷筒机构、升降机构等的自动控制[6],并对其进行了功能性测试。结果表明:摇臂方案可以实现车下区域的清扫,吸尘小车伸出与回收比较顺畅,链排伸出后可以依靠弹簧销较好地锁止,形成具有一定刚性的摆臂,控制系统可以较好地控制样机各部分动作,自动运行较为平稳顺畅。通过本次研究可有效地解决路侧停车位这一特定场景的清扫保洁问题,提高了作业效率、降低了作业强度,在路侧停车位区域初步实现机械化作业,对于提升北京市道路清扫保洁水平、降低工人劳动强度、促进城市精细化管理具有重要意义。
猜你喜欢
航天制造技术(2022年4期)2022-09-30
汽车实用技术(2022年14期)2022-07-30
中国修船(2022年2期)2022-04-28
现代信息科技(2021年21期)2021-05-07
家庭影院技术(2020年8期)2020-09-11
重型机械(2020年2期)2020-07-24
电子制作(2017年1期)2017-05-17
创新时代(2016年10期)2017-05-06
科学启蒙(2016年8期)2016-09-27
新疆钢铁(2016年1期)2016-08-03
