
一种无人机自动换电系统的设计
2022-10-28 04:26赵梓杰兰天翔邹红艳
机械工程与自动化 2022年5期
杨 睿,赵梓杰,兰天翔,邹红艳
(南京林业大学 机械电子工程学院,江苏 南京 210018)
0 引言
四旋翼无人机在当代社会已经有了较为广泛的应用,但是续航问题还没有得到很好的解决,一般无人机续航时间维持在10 min~20 min左右。因此,不少研究者提出一些方法以提升无人机的续航时间,例如利用无线充电等方式来延长无人机工作时间[1,2],或者是通过使用燃料电池进行续航[3]。张值勋等[4]提出通过算法提高无人机续航时间。但是有关无人机自动返回换电站更换电池的相关研究仍是较少。李海琳等[5]提出通过机器视觉和卫星-惯性导航组合定位来返回移动基站,但是成本较高。张帆等[6]对智慧换电平台的设计作了简要说明,但是缺少无人机返航方面相应的论述。
超宽带技术(Ultra-Wideband,UWB)由于拥有较低的系统复杂度、较低的发射信号功率谱密度、较好的测距能力等性能,近年来广泛应用于各种定位系统的设计中[7-15]。因此,本文将UWB技术与基于航轨推算法的IMU(Inertial Measurement Unit)定位技术相融合,作为无人机空间定位方式,并通过视觉识别换电站上图标的方式进行无人机停靠,弥补UWB技术和IMU技术在实际应用场合中容易产生较大误差的缺陷。
本文设计的飞行器首先使用UWB技术结合TDOA(Time Difference of Arrival,到达时间差)算法,通过4个地面基站与飞行器之间的通讯得出飞行器在空间中的坐标作大范围低精度的定位;然后使用摄像头作小范围高精度定位,通过对采集到的图像进行高斯滤波[16]结合霍夫变换法[17],得到换电站平面的图形信息,从而准确降落。
1 UWB和IMU融合定位系统
1.1 UWB定位
UWB定位系统主要用于无人机实时的空间坐标获取,由各自搭载NodeMCU-BU01开发板的4个基站和1个搭载NodeMCU-BU01模块作为定位信标的无人机组成。UWB定位系统结构如图1所示。
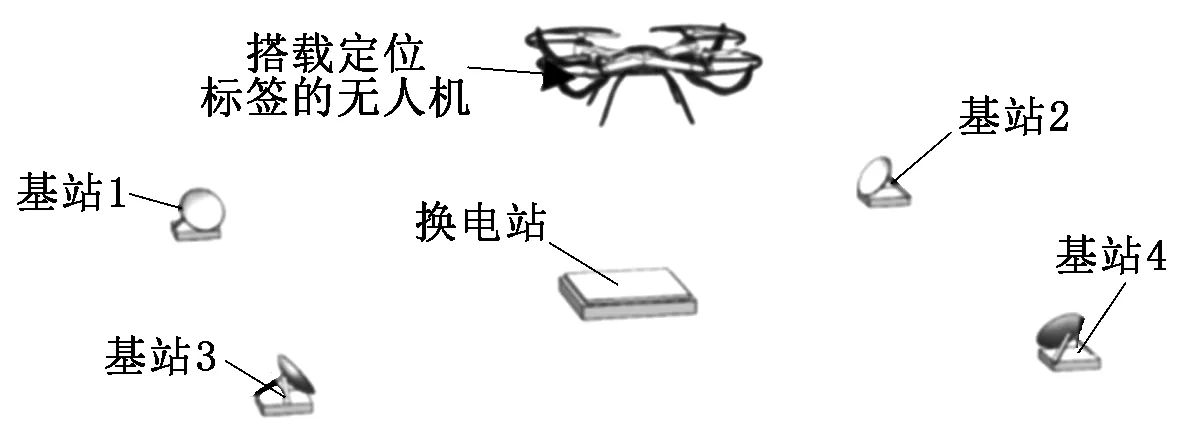
图1 UWB定位系统结构图
无人机标签坐标的获取采用TDOA算法,通过检测无人机发出信号到达多个时间戳精准同步的基站的时间差来计算无人机的实际坐标。根据数学规律,到达两个不动点的距离差为固定常数的点一定在以这两个不动点为焦点的双曲线上。现有基站1、2、3、4,则会有4条双曲线,且唯一都相交于无人机标签一点。算法示意图如图2所示。
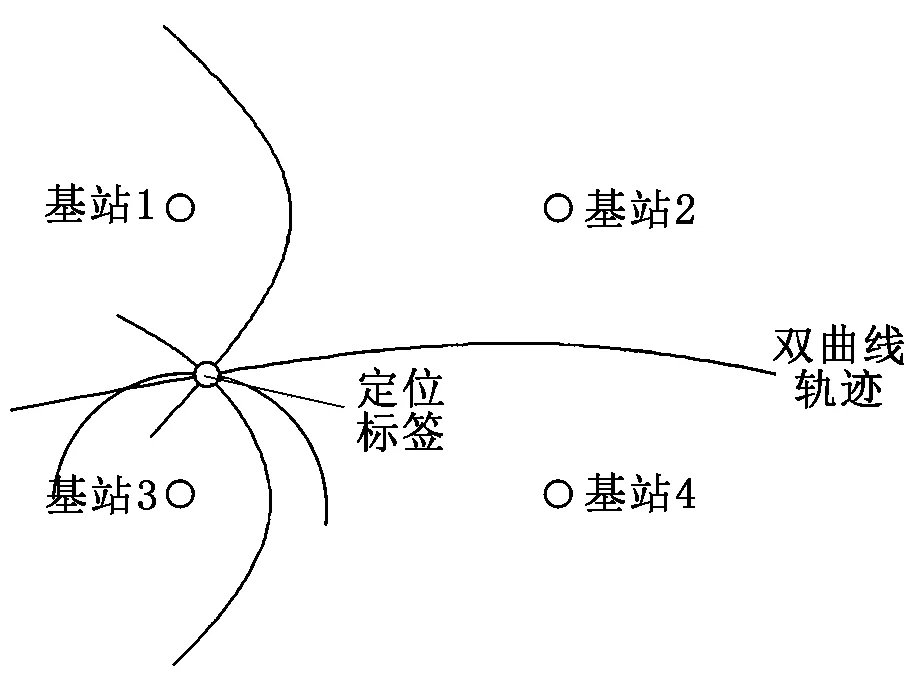
图2 TDOA算法原理示意图
现假设基站与无人机搭载的定位标签时间戳同步,将4个基站和换电站的空间位置人为设置好。规定换电站的空间坐标Sc=(xc,yc,zc)T。UWB定位解算出的无人机定位标签的空间坐标为Sf1=(xf1,yf1,zf1)T。基站i的空间坐标为Si=(xi,yi,zi)T,基站j的空间坐标为Sj=(xj,yj,zj)T。基站i、基站j与无人机定位标签间的距离分别为Ri、Rj;Rij为基站i、基站j与定位标签的距离之差。当定位标签发出信号后,基站i与基站j接收到的时间分别为ti、tj;tij为基站i收到定位标签发出信号的时间与基站j收到定位标签发出信号的时间之差。当i=4时,j=1;否则,j=i+1;i,j=1,2,3,4。规定电磁波的传播速度为C,则可以得到以下公式:
Rij=tij×C.
(1)
(2)
(3)
其中:Rij=Ri-Rj;tij=ti-tj。
(4)
(5)
由Rij=Ri-Rj可得:
(6)
将式(4)、式(5)代入式(6)中可得:
(7)
其中:xij=xi-xj;yij=yi-yj;zij=zi-zj。当i=4时,j=1;否则,j=i+1;i,j=1,2,3,4。
最终代入数据求解式(7),可解得无人机定位标签的空间坐标Sf1=(xf1,yf1,zf1)T。
1.2 IMU定位
IMU是惯性测量单元的缩写,IMU结合了陀螺仪和加速度计,可以测量运动物体的矢量加速度和三轴角速度,广泛应用于无人机飞行控制。
IMU定位基于航轨推算法,即通过无人机前一时刻位置坐标及运动状态推算出当前目标的位置坐标。反映在公式上表达如下:
(8)
其中:Sinit和Sf2分别为无人机的前一时刻位置坐标和IMU定位推算出的当前位置坐标,分别为(xinit,yinit,zinit)T和(xf2,yf2,zf2)T;v为IMU解算得到的无人机前一时刻空间速度矢量,为(vx,vy,vz)T;a为无人机前一时刻空间加速度矢量,为(ax,ay,az)T;T为系统采样时间。每一次计算出的当前位置坐标都作为下一刻的前一时刻坐标。
1.3 UWB和IMU融合
基于TDOA的UWB定位需要信标与基站的定位模块时间戳完全同步,且信号的传输会受到较大的环境影响。而IMU定位是基于运动积分进行的,因此历史中的定位误差会不断累积体现在新的定位数据中,随着时间的变化,定位精度不断下降。将UWB和IMU定位进行融合,可以很好地弥补各自的缺陷。UWB和IMU定位算法更新过程如图3所示。
UWB定位解算出无人机坐标Sf1=(xf1,yf1,zf1)T,IMU定位推算出无人机坐标Sf2=(xf2,yf2,zf2)T。Sf1乘以权值B,Sf2乘以权值A,两者求和得出无人机的解算坐标Sf=(xf,yf,zf)T,并将无人机的解算坐标作为下一次IMU定位坐标推算的前一时刻位置坐标。权值A、B根据实际系统调节而定。上述计算用公式表达如下:
Sf=ASf2+BSf1.
(9)
A=1-B.
(10)
无人机执行返航动作后,实时比较无人机的空间坐标和换电站的坐标数据;当xf≈xc,yf≈yc,zf-zc≈X时,开始执行视觉辅助定位。其中,X为无人机距离换电站的竖直高度,根据实际系统的情况而定,确保摄像头能捕捉到换电站上的图形标志。
1.4 实验数据
由于高度的测量难以进行,因此本系统在学校操场进行二维平面上的实验。由人拿着定位标签代替无人机。式(9)中的权值参数设置为:A=0.3,B=0.7。相关坐标设置如表1所示。

表1 实验系统坐标设置 m
系统启动后,对定位误差记录如图4、图5所示。
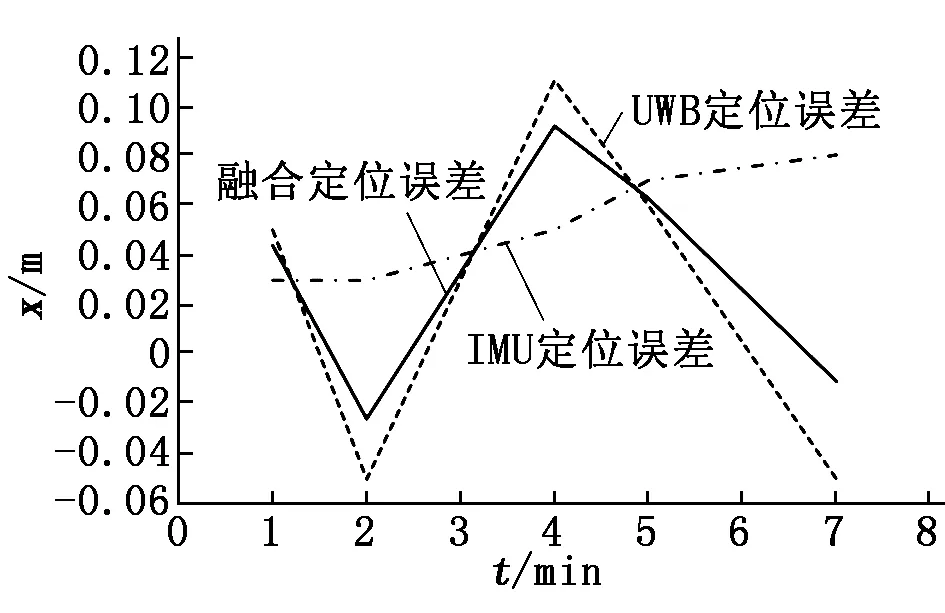
图4 实验数据横坐标推算误差
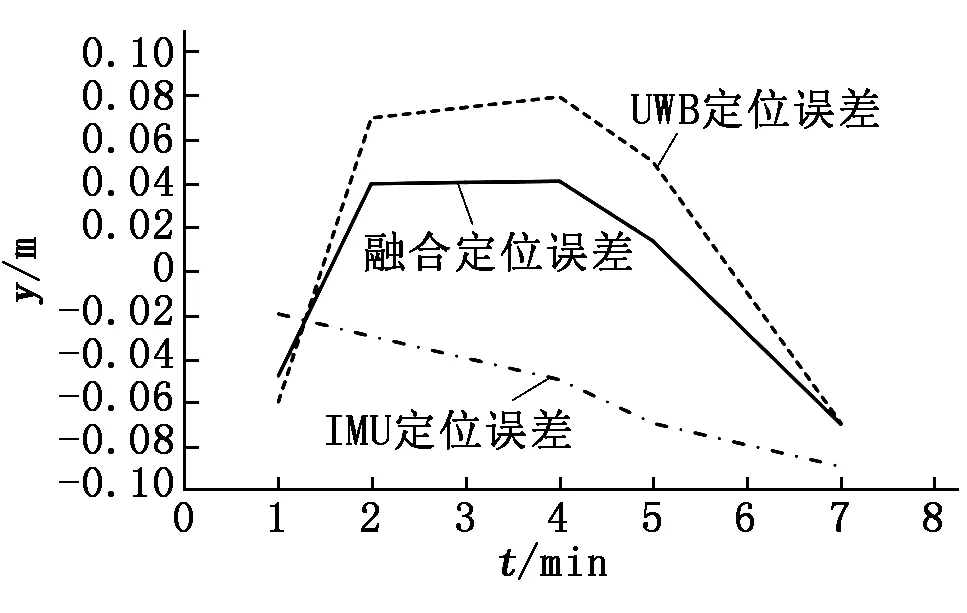
图5 实验数据纵坐标推算误差
图4、图5为实验数据误差。从图4和图5中可以得出,UWB系统解算得出的坐标误差不稳定,在0~11 cm左右。在采样时间为4 min时,横、纵坐标的解算误差达到最大,此时是由于基站2与无人机定位信标的信号直线传输路径被一挡板截断,由此可见UWB定位系统受环境条件影响较大。IMU系统推算出的坐标虽然一开始误差较小,但是随着时间变化,误差逐渐增大。将UWB和IMU定位技术融合后,补足了两种方法各自的缺陷,减小了系统误差,使其基本稳定在0~9 cm左右。
2 视觉辅助定位
2.1 识别系统及流程
视觉部分采用树莓派、摄像头结合OpenCV对换电站平台上的图形进行检测识别,平台表面示意图如图6所示。
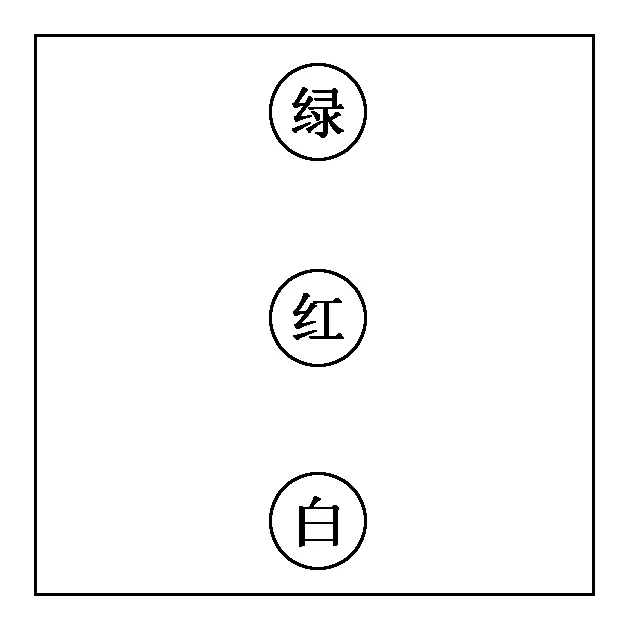
图6 换电站平台示意图
换电站正方形平台为全黑色,中间从上至下分别有绿、红、白三个圆形标记,红色圆心标记位于平台的正中央。检测识别流程如图7所示。
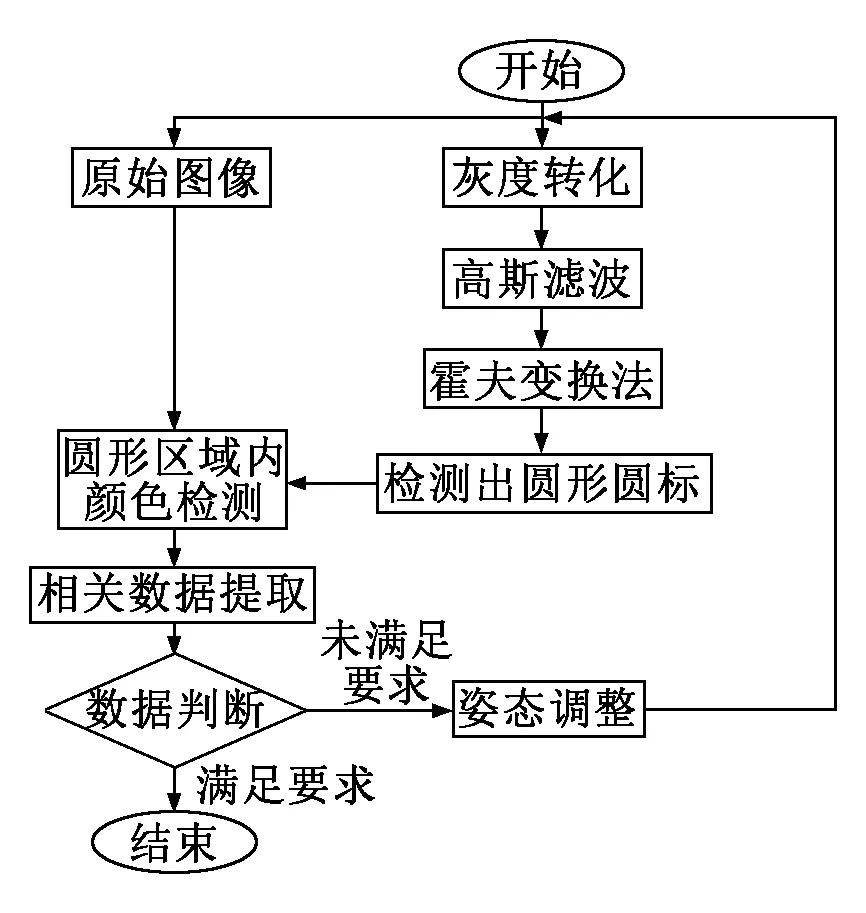
图7 视觉定位检测识别流程图
在摄像头开始工作后,将采集到的每帧图像拷贝一份,并将拷贝的图像灰度化,通过高斯滤波减少图像中的噪点。再通过霍夫变换法检测出灰度图中的圆。随后将圆在灰度图中的区域标记在原始图像上,并检测圆形区域内的颜色,同时提取三个圆的中心坐标。
当三个中心圆的横坐标未能保持在正方形平台的中间,或红色圆的圆形坐标未能处于正方形平台的正中心,或图像中从上至下并非是绿、红、白的顺序,则不满足要求,无人机需根据参数情况进行平移或者旋转直至要求满足,视觉辅助定位部分结束。
2.2 圆检测实验
通过霍夫变换法对图6中的圆进行检测,提取出中心坐标。检测数据如表2所示。根据图6,给图中圆自上而下编号为圆1、圆2、圆3。
由图6和表2可知,实验结果准确,视觉辅助定位方法可行。
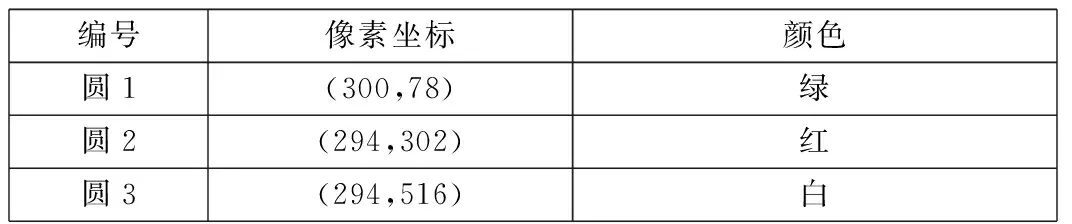
表2 圆检测实验数据
3 无人机电源系统设计
在无人机自动换电系统中,电源结构的设计与换电过程关联紧密,为保证换电过程的顺利进行,无人机端的微型处理器必须保持全程带电不停机的状态,为此设计大、小双电池方案来构建无人机的电源系统。
大电池为无人机的主电源部分,为11.2 V锂电池,为无人机上所有设备供电。该电池设计为由电磁卡扣与机身连接的快速拆卸形式,方便在换电时电池快速脱落以及新电池的安装。电池的两个电源触点与无人机电源系统之间使用接触式弹簧触点连接,在保证良好的电流供应前提下做到了电池的快拆卸设计,如图8所示。
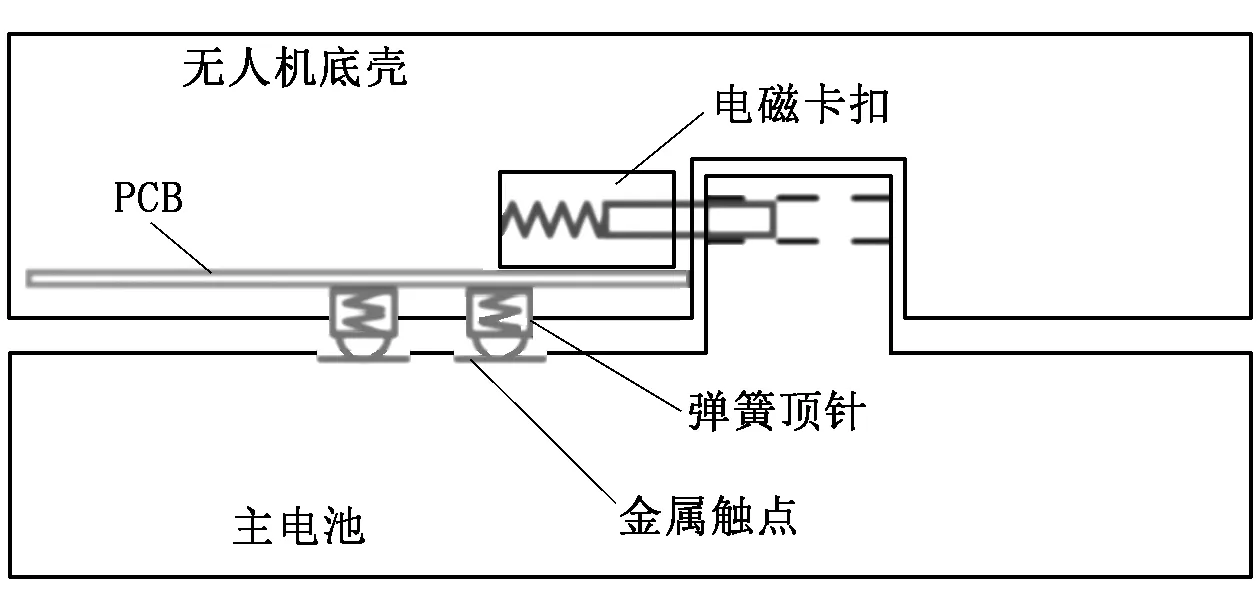
图8 无人机主电池部分结构图
副电池是无人机的备用电池,其容量较小。副电池保证无人机系统在大电池脱落的情况下,与换电过程直接相关的器件有充足的电力供应。在本系统中,以一块超级电容作为无人机的副电池,其最大的特点是支持的充放电电流极大,完全可以满足短时间大电流工作需求。
主电池需通过BUCK降压DC-DC电路[18]进行降压,从而为无人机内部所有低压器件进行供电。副电池的放电端需设置BOOST升压DC-DC电路[19],使输出到系统的电压维持稳定。主、副电池的电路结构如图9所示。
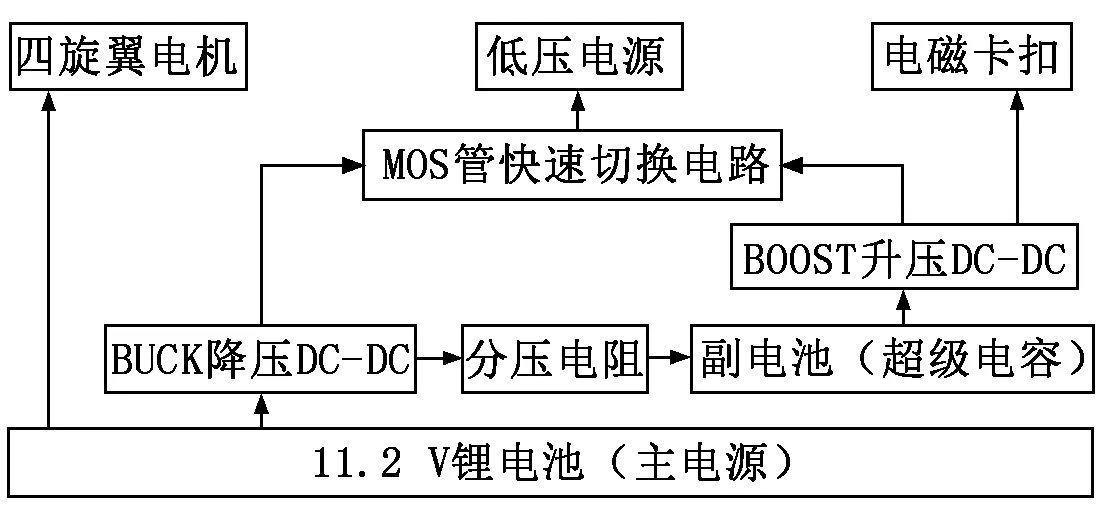
图9 主、副电池电路结构图
4 结束语
本文设计了一套无人机自动换电的理论定位系统,通过UWB和IMU融合定位技术和图像处理技术确保无人机在电池低压后能够自动地返回换电站进行电池更换。在室外环境下,UWB和IMU融合定位技术可以控制定位误差在0~9 cm左右,基本满足定位的需求。通过研究分析,本文提出的方案虽然仍未解决无人机延长供电时间等问题,但是可以通过自动检测并更换电池,达到更长时间持续执行任务的效果,对于无人机监测等领域具有一定的意义。
猜你喜欢
汽车实用技术(2022年13期)2022-07-19
中学生数理化·中考版(2021年12期)2021-12-31
汽车观察(2021年6期)2021-11-20
新能源汽车报(2020年32期)2020-09-27
新能源汽车报(2020年26期)2020-08-04
建材发展导向(2019年5期)2019-09-09
电子制作(2017年8期)2017-06-05
探索科学(2017年4期)2017-05-04
中国交通信息化(2016年8期)2016-06-06
移动通信(2015年17期)2015-08-24
