六自由度磁悬浮电机研究进展
2022-11-10 04:30黄子纳曹广忠黄苏丹王丽佳
微电机 2022年10期
黄子纳, 曹广忠, 黄苏丹, 王丽佳
(深圳大学 机电与控制工程学院,广东省电磁控制与智能机器人重点实验室,广东 深圳 518060)
0 引 言
极紫外(Extreme Ultraviolet,EUV)光刻是目前最前沿、最高水平的光刻技术,已成为目前最高端光刻机亟需攻克的关键技术。使用EUV光源开发的光刻系统须在高真空环境中暴露硅晶片以防止光学元件的污染和空气对EUV光的吸收。六自由度磁悬浮电机采用磁浮技术实现空间的六自由度运动,从而摆脱机械摩擦,可在真空环境中运行,且具有直接驱动、可靠性高、高精度运动等特点,已成为EUV光刻机等须在高真空、高洁净环境下运行的高端装备的一种前沿关键技术。
六自由度磁悬浮电机最早由美国麻省理工学院W.J.Kim等人提出,动定子分别采用一维Halbach永磁体阵列与励磁绕组实现了电机的六自由度运动[1]。六自由度磁悬浮电机自诞生以来,以其突出的潜在价值引起学术界的广泛关注。国内外学者对六自由度磁悬浮电机进行了一系列研究,并取得了突出的研究成果。国外研究机构主要包括美国麻省理工学院[1]、荷兰埃因霍芬理工大学[2-4]、西班牙TEKNIKER工业研究中心[5]、韩国电工技术研究所[6]、加拿大英属哥伦比亚大学[7]、新加坡国立大学[8]等。我国在六自由度磁悬浮电机研究方面起步较晚,也取得了一系列的研究成果,主要研究机构包括清华大学[9]、西安交通大学[10]、哈尔滨工业大学[11]、华中科技大学[12]、深圳大学[13]等。近十几年来,工业界先后推出六自由度磁悬浮电机产品,其中包括加拿大Planarmotor公司、德国BECKHOFF公司、ABB集团下的B&R公司等。迄今为止,已有多种型式的六自由度磁悬浮电机被公开报道,根据永磁体阵列和线圈阵列的结构特点,主要分为组合式六自由度磁悬浮电机、半组合式六自由度磁悬浮电机、对称式六自由度磁悬浮电机以及层叠绕组式六自由度磁悬浮电机四大类[14]。
本文首先介绍六自由度磁悬浮电机的工作原理与结构,分析四大类六自由度磁悬浮电机的研究现状与特点,最后探讨六自由度磁悬浮电机的发展趋势并指出未来研究方向。
1 六自由度磁悬浮电机的原理与结构
六自由度磁悬浮电机由永磁体阵列和线圈阵列组成基本的电磁结构。根据动子与定子的安装位置,可将六自由度磁悬浮电机分为动圈式和动磁式两大类。动圈式六自由度磁悬浮电机的励磁线圈安装在动子上,励磁线圈随动子运动而运动;动磁式六自由度磁悬浮电机的永磁体装在动子上,永磁体随动子运动而运动。两种结构各有优缺点,动圈式六自由度磁悬浮电机建模时不需要考虑永磁体阵列的边缘效应,但是动子外部的电气连接将引入一定的扰动,并且动子线圈工作时产生的热量不容易消散。动磁式六自由度磁悬浮电机可在定子线圈附加散热装置具有较好的散热性能,且动子与外部无电气连接实现了真正的无接触悬浮,但是不能忽略动子永磁体阵列的边缘效应,进而增加了电机建模的难度。
动圈式和动磁式六自由度磁悬浮电机的工作原理大体相同。图1为六自由度磁悬浮电机结构运动原理图。永磁体产生的永磁磁场与线圈绕组中的励磁电流相互作用,会产生多组电磁力,包括沿水平方向运动的推力(Fx1、Fy2、Fx3、Fy4)以及竖直方向运动的悬浮力(Fz1、Fz2、Fz3、Fz4)。将不同方向的推力和悬浮力合成为动子平移运动(沿坐标轴x、y、z平移)的三个相互垂直的力以及旋转运动(绕坐标轴x、y、z旋转)的三个相互垂直的力矩。采用合适的控制策略对三个力和三个力矩进行有效地控制,就可实现动子在空间的六自由度运动。
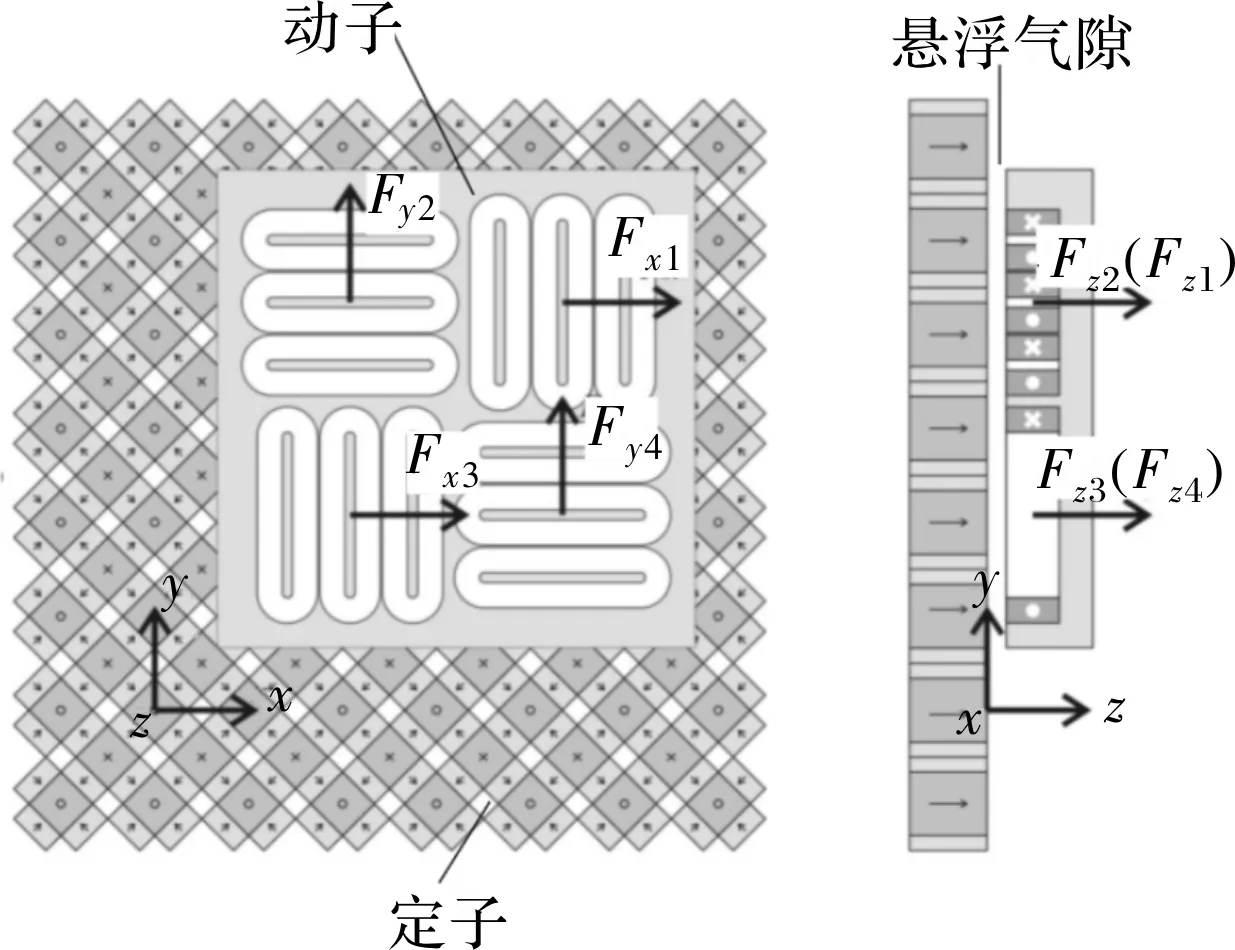
图1 六自由度磁悬浮电机结构运动原理图
此外,根据永磁体阵列和线圈阵列的结构特点,六自由度磁悬浮电机主要可分为组合式、半组合式、对称式以及层叠绕组式四大类。组合式六自由度磁悬浮电机用一维永磁体阵列和组合形式线圈阵列;半组合式六自由度磁悬浮电机采用二维永磁体阵列和组合形式线圈阵列;对称式六自由度磁悬浮电机的永磁体阵列和线圈阵列均为对称结构,且均能产生二维平动磁场;层叠绕组式六自由度磁悬浮电机的采用一维或二维永磁体阵列和由两套绕组相互垂直排列的线圈阵列。六自由度磁悬浮电机的性能主要决定于永磁体阵列与线圈阵列的结构,不同结构的永磁体阵列与线圈阵列使这四类六自由度磁悬浮电机具有显著不同的特点。
2 六自由度磁悬浮电机的分类及特点
2.1 组合式六自由度磁悬浮电机
美国麻省理工学院的W.J.Kim于1997年研制出第一台六自由度磁悬浮电机,其具体结构如图2所示,该电机属于动磁组合式六自由度磁悬浮电机[1]。电机动子由4个一维Halbach永磁体阵列组成,定子由4个励磁线圈组合而成;电机动子的六自由度测量方案采用测量水平方向距离的激光干涉仪和测量垂直方向距离的电容传感器;电机运动行程为50 mm×50 mm×0.4 mm,实现了5 nm的定位精度。由于只有靠近永磁体一侧的线圈对动子有力的作用,线圈励磁电流的利用率较低,并且电机动子的运动行程受机械结构的限制使其难以实现大行程运动。
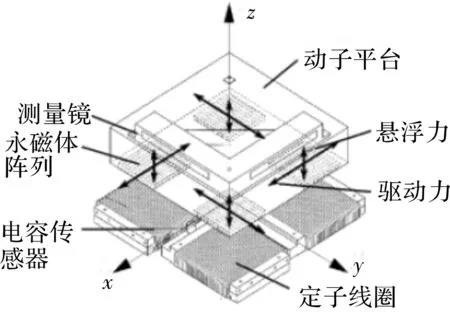
图2 W.J.Kim等人提出的动磁组合式六自由度磁悬浮电机结构
新加坡国立大学的C.K.Pang于2017提出了如图3所示的动磁组合式六自由度磁悬浮电机。电机动子由4个一维Halbach永磁体阵列组成,定子由多个方形励磁线圈组成,通过增加定子励磁线圈的数量可实现动子行程的拓展[8]。
组合式六自由度磁悬浮电机的动子一般采用一维Halbach永磁体阵列组合而成,容易实现水平推力的物理解耦,进而控制策略较为简单,且由于一维Halbach永磁铁阵列相比于二维Halbach永磁体阵列的磁场谐波分量更小,因此动子具有更小的力脉动。
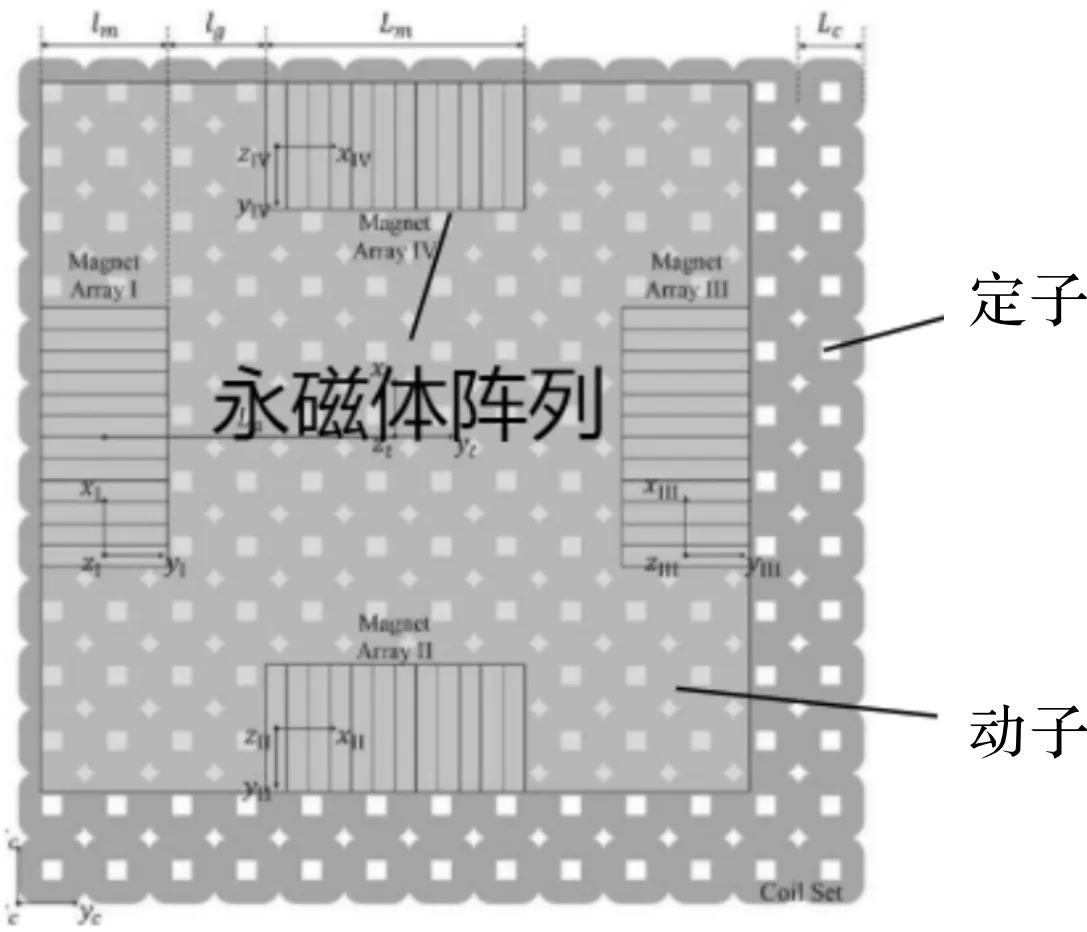
图3 C.K.Pang等人提出的动磁组合式六自由度磁悬浮电机
2.2 半组合式六自由度磁悬浮电机
荷兰埃因霍芬理工大学的J.C.Compter 等人于2004年提出了一种动圈半组合式六自由度磁悬浮电机,其结构如图4所示[2]。电机动子由4套绕组组合而成,定子采用二维Halbach永磁体阵列。永磁体阵列与线圈阵列设置成相差45°角的结构,从而实现水平推力的物理解耦,为后续六自由度磁悬浮电机设计提供了新思路。电机的位姿传感器为测量水平方向距离的霍尔传感器阵列和测量垂直方向距离的电容传感器,实现了10 μm的定位精度。
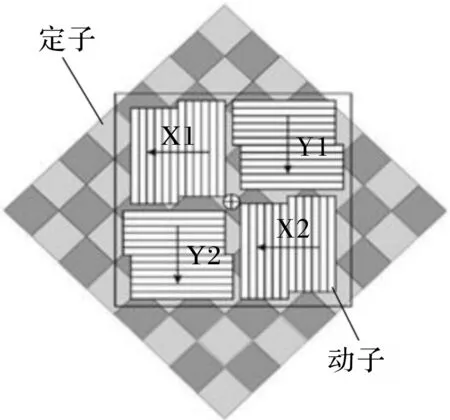
图4 J.C.Compter等人提出的动圈半组合式六自由度磁悬浮电机结构
2008年,荷兰埃因霍芬理工大学的J.W.Jansen等人提出了如图5所示的动磁式半组合式六自由度磁悬浮电机[3]。电机动子为二维Halbach永磁体阵列,定子为改进的二维扁平线圈阵列,线圈按鱼骨型排列,线圈之间的长边相互垂直以减少水平推力的耦合。
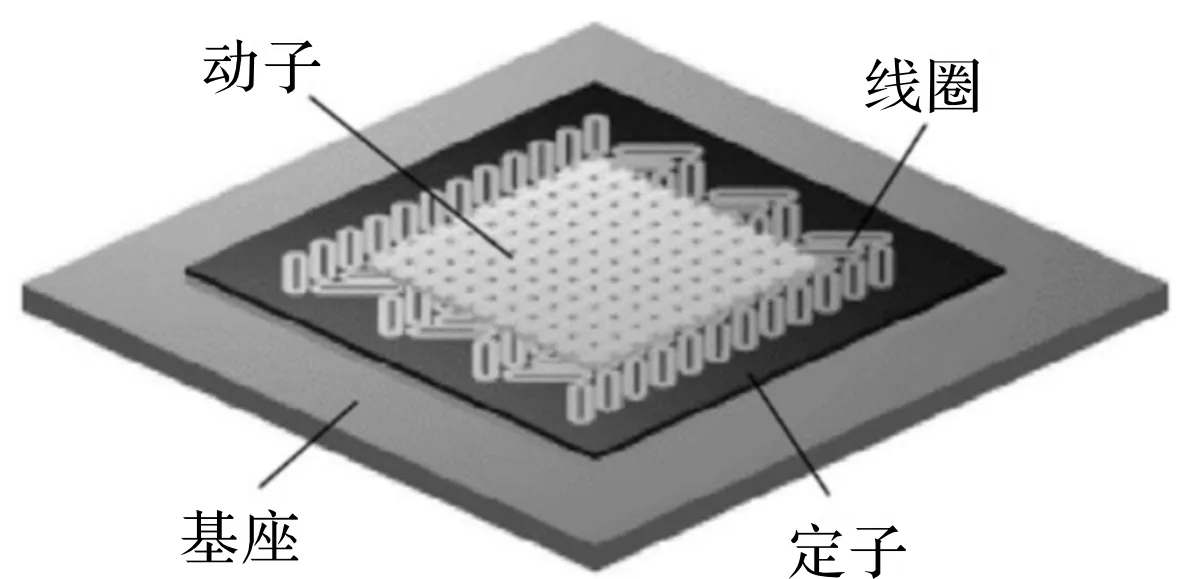
图5 J.W.Jansen等人提出的动磁半组合式六自由度磁悬浮电机
半组合式六自由度磁悬浮电机的永磁体阵列采用二维Halbach永磁体阵列,所有驱动单元共用一个Halbach永磁体阵列的磁场,集成度高;通过增加定子永磁体阵列或定子线圈阵列可拓展动子运动行程;由于推力具有耦合特性,因此控制策略较为复杂。
2.3 对称式六自由度磁悬浮电机
荷兰埃因霍芬理工大学的J.D.Boeij等人于2006年提出了如图6所示的六自由度磁悬浮电机[4]。该电机为动圈对称式六自由度磁悬浮电机,定子由对称排列的方形线圈阵列组合而成,动子采用二维Halbach永磁体阵列。
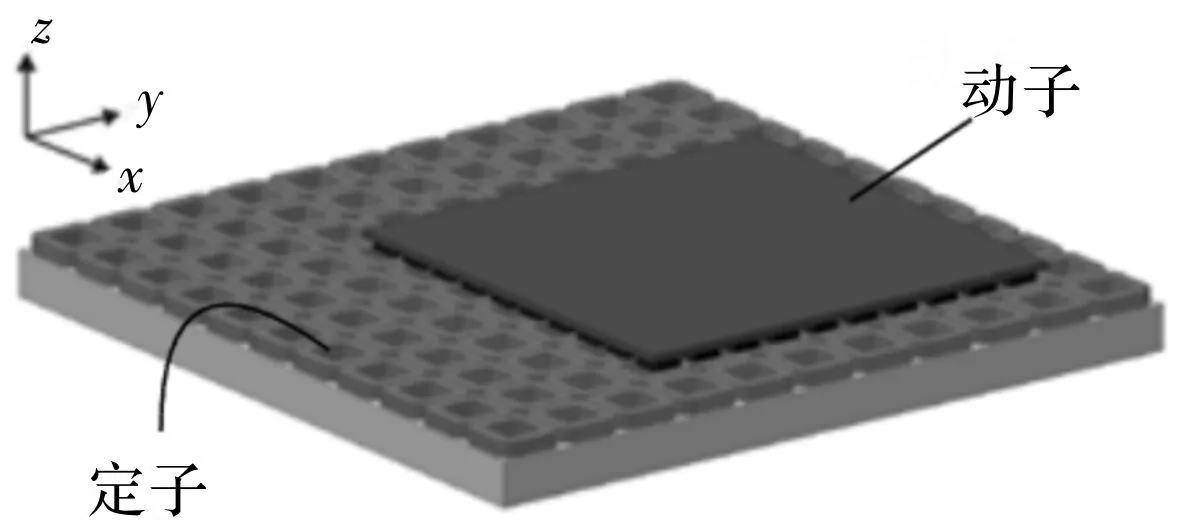
图6 J.D.Boeij等人提出的动磁对称式六自由度磁悬浮电机
对称式六自由度磁悬浮电机的动子和定子均采用对称式结构,因而电机结构更加紧凑,能产生更大的悬浮力;但电机单个励磁线圈产生的电磁力有可能分解为六个自由度上的电磁力和电磁转矩,加剧了电磁力与电磁力矩之间的耦合,使得控制策略更为复杂。
2.4 层叠绕组式六自由度磁悬浮电机
加拿大英属哥伦比亚大学的X.Lu于2012年提出了一种动磁层叠绕组式六自由度磁悬浮电机,其结构如图7所示[7]。电机动子由4个一维永磁体阵列组成,定子由2个正交方向的励磁导线层叠排列组成,定子励磁导线以印制线路板(Printed Circuit Board,PCB)的形式制作而成,具有槽满率高、推力密度大的优点。
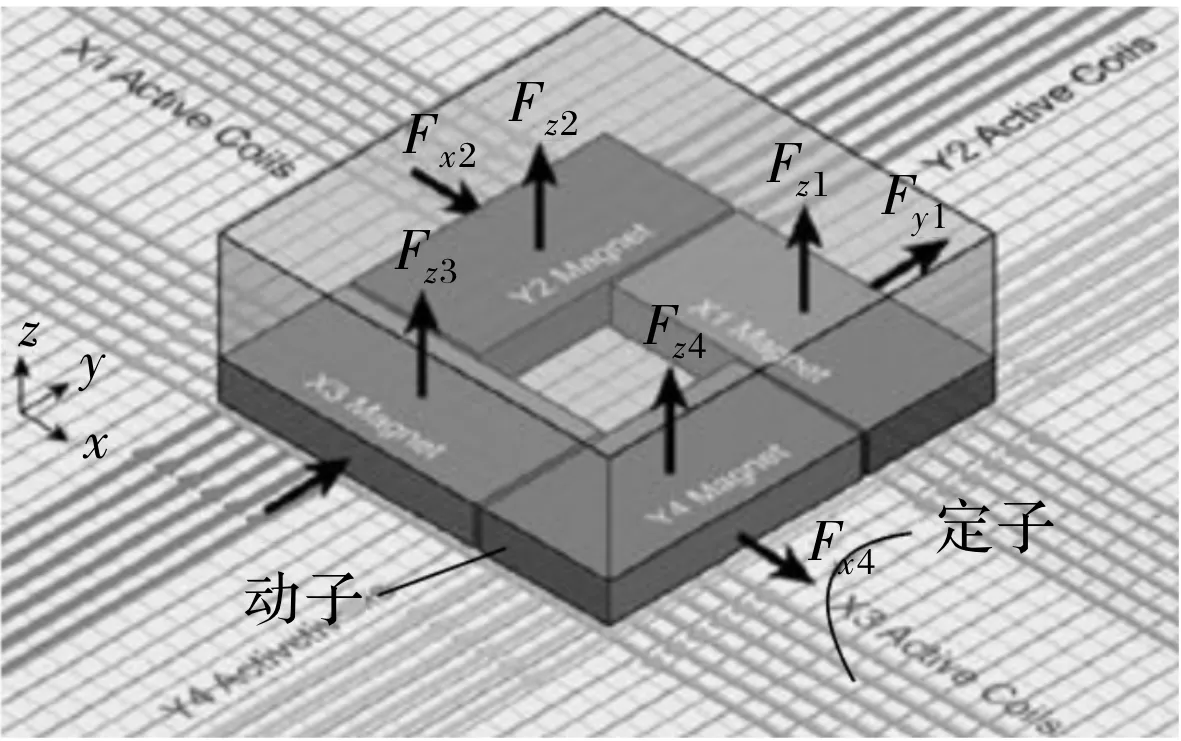
图7 X.Lu提出的动磁层叠绕组式六自由度磁悬浮电机结构
2020年,我国深圳大学的曹广忠团队在X.Lu提出的动磁层叠绕组式六自由度磁悬浮电机的基础上,提出并研制了一种动磁层叠绕组式六自由度磁悬浮电机,其结构如图8所示[13]。电机动子由4个一维Halbach永磁体阵列两两相互垂直拼装而成,定子为层叠绕组式线圈阵列组成的PCB板。
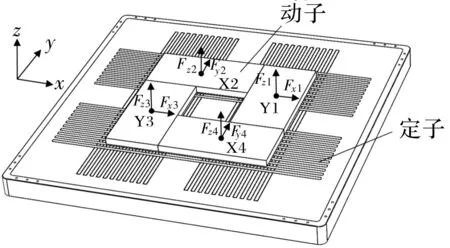
图8 曹广忠等人提出的动磁层叠绕组式六自由度磁悬浮电机结构
电机动子的Halbach永磁体阵列与定子的励磁导线的结构示意图如图9所示。通过采用呈2个周期排列方式的Halbach永磁体阵列,X(或Y)永磁体阵列产生的推力和悬浮力只受x(或y)方向的励磁电流控制,进而实现了水平推力的解耦。电机采用4相电流的励磁方案,相对于X.Lu所提出电机的3相电流励磁方案,减小了磁场谐波分量在电磁力解耦中产生的力脉动。
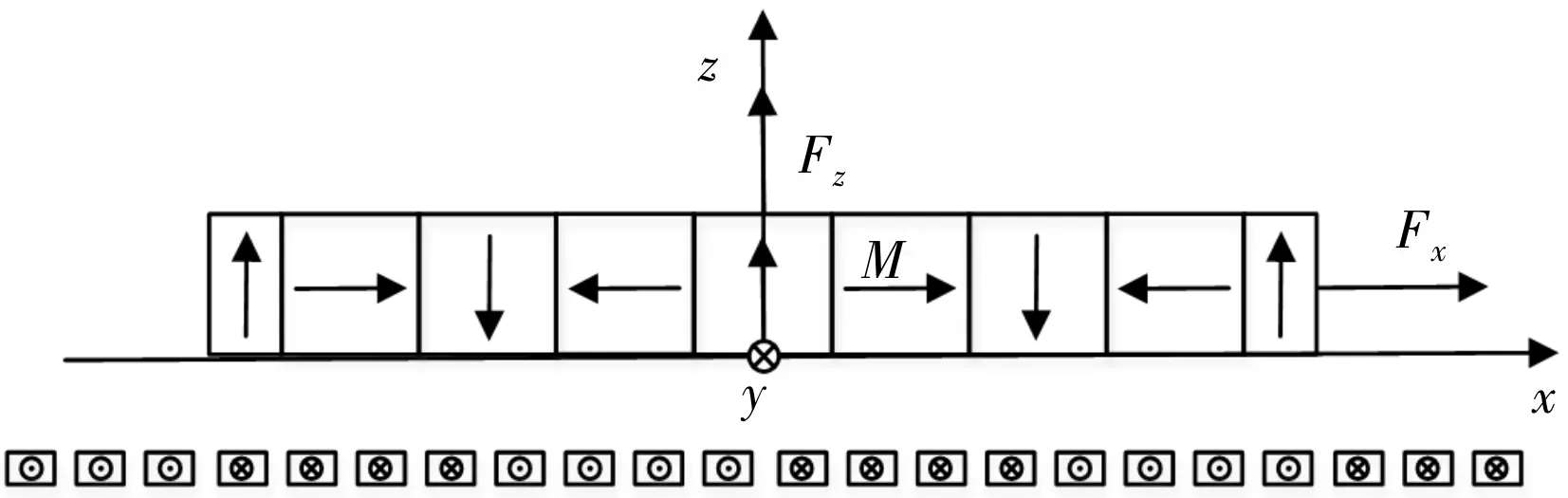
图9 曹广忠等人提出的电机动子Halbach永磁体阵列与定子励磁导线结构示意图
永磁体阵列边缘磁场的衰减是影响动磁式磁悬浮电机定位精度的重要因素之一,一般采用在线性区域给励磁电流的解决方案,在一定程度上可减少磁场边缘效应,但是其磁场利用率太低。根据文献[15]提出的场折叠理论,在永磁体阵列两端附加额外的励磁线圈,补偿永磁体阵列在图8所示x方向两端永磁体磁场的衰减,进而简化了控制策略。
电机的位姿传感器为激光位移传感器,传感方案示意图如图10所示。在动子上添加辅助定位装置,在电机基座的水平方向和垂直方向各安装3个激光测距仪,根据检测得到的6个平移距离并采用位姿解算方法,从而获得动子六自由度的位姿信息。
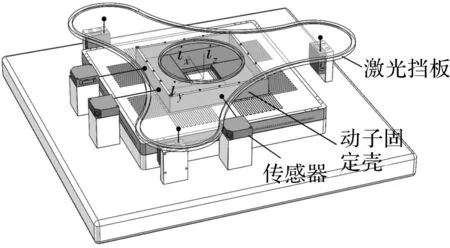
图10 曹广忠等人提出的电机位姿测量方案示意图
层叠绕组式六自由度磁悬浮电机的励磁绕组由两套相互垂直排列的绕组排列而成,相对于矩形和方形线圈等短距励磁绕组,一般不需要考虑线圈圆弧端部引起的附加转矩补偿控制问题。采用PCB板代替传统的铜线或漆包线绕组作为定子线圈绕组阵列,能极大提升电机槽满率与装配精度。动子运动时需要对动子投影所覆盖的导线束进行励磁,而只有动子正对的部分导线可有效励磁,进而导致能量利用率低。
3 六自由度磁悬浮电机的未来研究方向
国内外已经研制了多种型式的六自由度磁悬浮电机,部分类型已经投入工业应用,但是六自由度磁悬浮电机的研究仍处于起步阶段,难以满足高端光刻机等先进制造装备的需求,未来需要深入研究的方向包括:
(1)六自由度磁悬浮电机的新型结构设计与优化。寻找一种综合性能最优的电磁结构需要从永磁阵列和线圈阵列两个方面着手。六自由度磁悬浮电机的永磁体阵列多采用Halbach阵列,设计磁通密度大,基波含量小的永磁体阵列是六自由度磁悬浮电机永磁体阵列设计的关键。电机的电磁力由线圈阵列与永磁体阵列相互作用参数,线圈阵列需要配合永磁体阵列的设计进行合理的设计,尽可能实现电磁力的结构上的解耦。电机的发热主要集中在励磁绕组,绕组温度过高会带来电机模型的变化甚至损毁电机。特别是动圈式磁悬浮电机,需要设计合理的散热装置,既保证线圈的温度不过高,同时对动子运动的影响尽可能小。
(2)六自由度磁悬浮电机的高效鲁棒解耦控制策略。六自由度磁悬浮电机的电磁力通常是有多个驱动单元的电磁力合成,各个驱动单元的电磁力都不同程度影响着动子的合成电磁力或力矩,一般通过力分配的方式将动子的期望电磁力或力矩分配成各个驱动单元的期望电磁力实现电磁力解耦。然而,在磁悬浮电机设计中,驱动单元提供的可控的电磁力的自由度数往往多于动子的电磁力或力矩的自由度数,因此存在着无穷多个解。对于这类问题,需要通过增加约束条件来获得驱动单元的电磁力的最优解。与此同时,磁悬浮电机的驱动单元本身的电磁力在不同维度的分量也存在耦合的情况,其耦合情况与励磁电流空间分布与大小直接相关。通常采用电流矢量控制的方式来对励磁电流实现解调,使得解调后的励磁电流独立控制驱动单元电磁力在不同维度的分量,该方法与永磁同步旋转电机的DQ分解方法同理。然而,对于短距绕组结构的磁悬浮电机,还需要考虑电流解调控制中引起的附加转矩的补偿控制。
(3)六自由度磁悬浮电机位置的精准检测。为实现六自由度磁悬浮电机的六自由度驱动和高精度运动控制,需要对电机的动子进行实时和无接触的位置检测。随着光刻机等芯片制造领域的技术要求不断提高,六自由度磁悬浮电机的定位精度需达到纳米级水平。采用激光干涉仪作为传感器是实现六自由度磁悬浮电机动子无接触测量最有潜力的纳米级测量方案之一,但激光干涉仪也存在诸多限制,比如非线性误差,激光光源的波动,温度等非周期性扰动都对其精度造成一定的影响。目前,激光干涉仪的非线性误差补偿领域已经有了诸多成果,大大提高了其性能,结合信号处理等其他技术来补偿其余非周期扰动成为提高激光干涉仪精度的一种解决方案。
(4)六自由度磁悬浮电机的高精度综合运动控制。六自由度磁悬浮电机的多自由度耦合以及其磁场具有高度非线性和关于位置的不确定性特点,动子平台任一方向上位置的变化会导致系统模型参数摄动和其余方向位置扰动,磁悬浮平面电机是一个多输入多输出非线性耦合系统。在平面电机常规的控制器设计中,通常过度依赖被控制对象精确的数学模型。然而六自由度磁悬浮电机的电磁力以及磁场强度具有很强的非线性,并且随着电机连续工作时间的增加,由于发热、散热不均匀等其它因素,会导致磁场强度以及电磁力产生波动。因此六自由度磁悬浮电机的控制器设计中,必须考虑电机模型的不确定性,以及内部和外部的干扰,并且针对上述问题设计鲁棒控制器。国内外学者对此也提出了很多的控制策略,比如滑膜控制,鲁棒控制,自抗扰控制等作为控制器,以及采用前馈补偿,重力补偿策略来提高控制性能。采用不过度依赖电机模型的控制算法,同时考虑电机的具体特性加入合适的补偿策略来提高控制器性能,将成为六自由度磁悬浮电机控制器设计的主要方向。
4 结 论
六自由度磁悬浮电机在先进制造装备领域具有广阔的应用前景,尤其适用于EUV光刻机等须在高真空、高洁净环境下运行的前沿高端装备。动磁式六自由度磁悬浮电机由于具有散热设计简单易行、动子受外界干扰小等优点将成为六自由度磁悬浮电机的未来发展的重点。动磁层叠绕组式六自由度磁悬浮电机,可采用成熟的PCB板技术制作定子,使其更适合于工业应用。目前,国外的六自由度磁悬浮电机技术水平领先于国内,六自由度磁悬浮电机的研究仍不够完善,还不能满足高端制造装备的需求。未来随着六自由度磁悬浮电机设计技术与控制技术的不断完善,电机性能将取得突破性提高,六自由度磁悬浮电机在高端装备等诸多领域将得到进一步的应用。
猜你喜欢
重庆理工大学学报(自然科学)(2022年9期)2022-10-26
冶金设备(2022年1期)2022-06-10
小猕猴智力画刊(2022年4期)2022-05-23
计算机仿真(2022年1期)2022-03-01
防爆电机(2021年5期)2021-11-04
河北农机(2021年3期)2021-03-31
科技视界(2020年19期)2020-07-30
东西南北(2018年14期)2018-10-16
军事文摘(2017年16期)2018-01-19
都市家教·上半月(2017年8期)2017-08-29