
基于经验模式滤波与循环神经网络的水锤压力信号预测
2022-11-26 06:57张博徐卓飞李小周毛振凯郭鹏程
排灌机械工程学报 2022年11期
张博,徐卓飞,李小周,毛振凯,郭鹏程*
(1. 中国电建集团西北勘测设计研究院有限公司,陕西 西安 710065; 2. 西安理工大学水利水电学院,陕西 西安 710048)
长距离有压输水是最为常见的输水方式,由于在输水过程中经常会遇到关阀、停泵等情况,此时会产生水锤现象对管路造成严重的冲击[1-2].严重时会导致管路破裂损毁,甚至破坏泵站等输水设施.目前主要采用各类装置对管线进行水锤防护,例如通过单项调压塔、注气阀、空气罐等装置进行稳压,或利用水锤消除器、泄压阀等降低冲击等[3];在大流量、低扬程、长距离输水工程中还经常采用调压室进行防护,此时管路最小压力往往受调压室最低水位控制[4];针对各种水锤防护装置的选择问题,也可以基于特征线法开展长距离输水工程水锤仿真计算,以评估其在不同工况下的防护效果,特征线法以实际工况为基础,在工程中得到了广泛应用[5];除了各类装置外,也有学者对关阀策略进行了优化并评估水锤冲击效果,选取水锤影响较小的关阀方案或组合[6-7].
掌握水锤冲击的特性和规律,可为科学预防水锤、开展相关防护设计、计算仿真等提供关键支撑.水锤信号是一类典型的时间序列数据,其在时间维度上存在极强的自相关特性.若能准确预测水锤信号变化趋势,则可提前预判冲击强度,对管路进行预警或采取紧急措施[8-9].对水锤冲击进行预测的困难主要体现在3个方面:一是信号在噪声影响下难以对其进行准确建模;二是水锤信号属于瞬态冲击后产生的信号,不存在明显的周期特性或趋势;三是不同流速下的水锤信号之间也存在较为明显的差异,这要求模型必须具备较强泛化能力,给水锤信号的预测带来了较大的困难.
近年来随着统计理论与机器学习的结合和发展,具有更强非线性数据预测能力的支持向量机回归、隐马尔科夫模型等方法也在各类信号预测中表现出更好的回归效果[10].深度神经网络模型以数据驱动为基础,具有极强的适应能力,虽然它无法解释物理过程和发生机理,但仍凭借其强大的数据挖掘能力在语音识别翻译、自然语言处理、金融序列预测等领域取得了一系列突破性成果.
针对以上特点,文中提出基于经验模式分解(EMD)和循环神经网络(RNN)的预测模型,拟通过EMD对水锤信号进行分解,从解析结果中滤除高频噪声分量,对重构信号进行深度学习研究,依托循环神经网络实现其预测模型的建立.
1 基于EMD和RNN的预测模型
1.1 基于EMD的水锤信号去噪
采取经验模式分解将水锤信号转化为一系列具有不同频率成分的本征模式分量,筛选出其中的噪声分量,再经过重构实现滤波去噪.该滤波方式可以保证信号能量损失处于较低水平,避免预测信号与实际信号差异过大,消除由于错估峰值而造成的实际应用安全隐患.
水锤压力信号的噪声去除过程如图1所示,先将原始信号分解为一系列IMF分量;随后,去除能量所占比较小的分量,将主要分量进行重构得到滤波信号.

图1 水锤压力信号的去噪过程Fig.1 Denoising process for a pressure signal of water hammer
记水锤信号构成的时间序列为x(t),EMD过程如下:① 按顺序提取压力脉动信号x(t)的所有极大值和极小值点,并将其依次定义为极大值序列xmax和极小值序列xmin;② 利用三次样条插值方法对步骤① 获取的水锤信号极值序列进行插值,建立信号的上包络序列和下包络序列,再计算上、下包络线平均值序列m(t)=(xmax+xmin)/2;③ 用原始压力脉动信号减去平均值序列,记剩余序列为h1(t)=x(t)-m(t)并对其进行判定,如果h1(t)满足本征模式分量的定义,则将其记为一个分量结果,否则令x(t)=h1(t)并重复①—③步骤,直至新的h1(t)满足IMF分量定义;④ 用r1(t)=x(t)-c1(t)替代x(t)并重复上述步骤,x(t)最终被分解为n个IMF分量cn(t)和一个余项rn(t),即
(1)
通常将自身所包含极值点与过零点的总个数相等或相差1的信号定义为IMF分量,也可将IMF视为一系列调频调幅信号组合,计算式为
uk(t)=Ak(t)cosfk(t),
(2)
其中fk(t)为非递减函数,fk(t)≥0且包络Ak(t)≥0.
根据最大冲击幅值损失和能量损失来评估IMF分量的选取是否合理,当能量或幅值损失过大时,则该分量不应去除,文中设定阈值为90%,将代表信号主要成分的剩余分量重组即可得到滤波后信号.
1.2 RNN预测模型
RNN是一类用于处理序列数据的深度神经网络模型.其适用于以时间相关序列数据为输入的应用场景,并能够在序列时空发展方向上进行递归运算.RNN模型可以同时考虑当前的输入信息和此前多个时刻的输入信息的综合影响与内在关联,因此其对于历史数据具有很好地记忆功能,其给出的预测结果也充分考虑了前置数值的规律和特点,符合时间序列的特性.RNN的基本结构如图2所示.
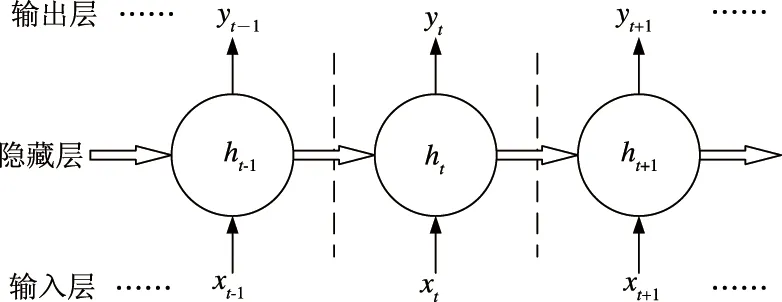
图2 RNN的基本结构Fig.2 Basic structure of RNN model
其中输入信息为xi,隐藏层为hi,输出信息为yi.其中每组单元的参数关系计算式为
ht=Hh[Wh·(ht-1,xt)+bh],
(3)
yt=Hy(Wy·ht+by),
(4)
式中:Wh,Wy分别为神经元的权值;bh,by分别为偏置量;Hh,Hy分别为2个激活函数;特定输出yt由输入值ht决定,RNN的最大特点则在于ht由新输入量xt和上一个神经元的隐藏层输出ht-1共同决定,通过这样的时序链接使其在信号预测中具备了天然优势.
在预测前对输入信号进行归一化处理,以提高模型的泛化能力,文中采用了最大值归一化方法,将每个分量的每个数值yi除以分量中最大值,即
y′i=yi/maxyi,
(5)
归一化后可将不同流速下的水锤冲击信号压缩到相同的尺度范围内,避免奇异值和数据波动等因素对模型参数训练造成的不利影响.
2 试 验
2.1 试验描述
为了探究瞬态流特性,设计并搭建了一套长距离输水管路试验平台,该平台主要由管路、水泵、阀门、水箱组成,利用压力传感器记录管路内部的压力信号,并配置了相应的NI数据采集卡和上位机.信号采集系统由NI-USB-6009采集卡、HM90A-H2压力传感器(HELM)和直流稳压电源构成,试验中采样频率设定为2 048 Hz,上位机为移动工作站Dell-M4800.试验装置设计和实物如图3所示.

图3 搭建试验平台Fig.3 Pipline system of test bench
整个装置选用钢质输水管道,模拟实际输水系统中的水锤冲击信号,其管径为DN100,管长合计160 m,顶部水箱容量1 m3,水泵功率7.5 kW.水泵将底部水箱的水抽到顶部水箱,再通过平行排列的回流管道流回底部水箱,形成完整的循环水路.
试验利用该系统模拟停泵水锤现象并获取相应时刻管路内部压力信号,试验过程如下:先打开水泵运行一段时间,确保整个管路系统已经注满水且运行稳定;观察流量计和压力传感器,确保流量和压力都处于相对稳定状态;迅速关闭水泵,并在1.5 s内迅速关闭水泵出口试验阀门,以获取停泵水锤压力信号;水流将在管路系统中产生巨大水锤压力,通过压力传感器采集距离试验阀门最近的水锤压力数据.通过停泵并关闭水泵出口阀门获取水锤压力信号,可避免水泵承受过大压力而损毁.
通过改变水泵频率,分别在5种不同流速v下采集水锤压力信号数据,试验数据流速及编号记录在表1中.预测模型建立阶段,以S1—S2为训练集进行训练,建立EMD-RNN预测模型,预测S3—S5为测试集,用于测试预测效果,所有信号选取长度为60 000个点,时间长度为30 s左右.

表1 试验数据编号Tab.1 Number of experimental data
2.2 滤波效果分析
分析各个IMF分量可知,管内压力信号主要以低频成分为主,而对于IMF分量而言,通常会先获取具有较高频率的分量,因此在选取分量时应当反向选取分量,高阶分量反而代表噪声成分,该特点为水锤信号的特性,这与IMF在机械振动、高频脉冲、通讯信号等领域的应用存在差异,IMF在上述应用中多依赖高阶分量信息.
去除IMF1—8分量,选取IMF9—18重新合成,形成滤波后信号,其滤波效果如图4所示,其能量损失不足0.1%,几乎可以忽略不计.

图4 滤波前后对比Fig.4 Comparison between filtered result and original signal
滤波后信号充分发挥了IMF包络平滑性的优势,所采用的方法很好地去除了高频噪声.为确认预处理效果,研究先后选取了滑移平均滤波、中值滤波和Savitzky-Golay滤波等3种常见信号预处理方法,从时域和频域2个角度评价滤波效果.
滤波后结果如图5所示.

图5 不同滤波器效果对比Fig.5 Comparison of different filters effects
图5a为时域滤波结果局部放大后对比图:由于EMD采用了3次样条插值,故重构信号平滑性较好;滑移平均滤波与五点三次滤波对于局部极值噪点的抑制效果不佳;中值滤波处理局部噪点效果好,但其滤波结果局部会产生持续振荡,这将给信号预测带来极大干扰.
图5b为滤波后频谱对比,由于压力信号多集中在较低频段,为便于观察采用了对数坐标.对比图5b可以看出,较高频段噪声经文中方法得到了有效消除,中值滤波次之,滑移平均滤波和五点三次滤波效果较弱.以图5b中标注的50 Hz工频噪声为例(该频率噪声通常由测试系统中电流引起),原始信号噪声幅值为0.001 7 mV,EMD滤波后该成分已经小于0.000 1 mV,几乎完全消除,验证了所提出方法的有效性.
2.3 预测模型分析
完成滤波后进行RNN模型建立及预测,在数据预测中,以每连续100个点为已知数据预测后续数据,通过已知连续点向前预测未知点数值,即输入层包含100个神经元.表1中每组数据共60 000个点,可划分为59 900个样本进行训练,预测时同样对S3,S4,S5每组数据中59 900个未知样本进行预测.设定模型隐藏层包含10个神经元,以完成模型学习.输出结果即为序列预测结果.激活函数设定为线性函数,模型中选择Adam优化器并设定均方差损失函数.
引入R2决定系数评估水锤预测结果,反映了所建立模型能够反映水锤信号变化的能力,其取值范围为0~1,通常认为越接近于1效果越好,模型训练的R2系数计算式为
(6)

3组预测信号结果的R2系数记录于表2,其值均大于0.990 0,反映出所建立的模型具有极高的准确度.预测信号与真实信号如图6所示,预测结果与真实结果的最大冲击幅值非常接近.

表2 预测结果评估Tab.2 Evaluation of prediction results

图6 预测信号与真实信号对比Fig.6 Comparison between predicted signal and original signal
3 结 论
1) 文中利用经验模式分解后的低阶分量进行重组,具有很好的滤波效果,滤波后信号能量损失不足0.1%,并具有较好的平滑性,且该方法无需依赖任何人工经验知识,具有自适应性.
2) 所提出RNN模型在训练和测试过程中表现出良好的性能和极强的泛化能力,在训练过程中实现了训练集样本的回归,通过对2组信号建立模型,成功预测了3组不同流速下的压力信号.
3) 研究为了客观评价信号预测效果,从能量损失、幅值损失、R2系数等多个指标进行评估,发现能量损失和幅值损失均低于1%,R2系数大于0.990 0,验证了方法的正确性和有效性.
4) 所提出滤波及预测方法对于水锤冲击信号有着极强降噪能力和一定泛化能力,可为各类风险评估、管路监测、健康管理提供有效手段.
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08
湖南水利水电(2021年6期)2022-01-18
节能技术(2021年5期)2021-11-22
北京汽车(2020年3期)2020-07-15
民用飞机设计与研究(2020年1期)2020-05-21
当代陕西(2019年19期)2019-11-23
智族GQ(2019年9期)2019-10-28
英美文学研究论丛(2018年1期)2018-08-16
中国水利(2015年7期)2015-02-28
太空探索(2014年4期)2014-07-19
