
压缩机回流阀自动控制研究
2022-12-29 12:02伍星光潘慧洁周子翔黄壹暄
天然气与石油 2022年6期
伍星光 贺 宏 梁 凡 潘慧洁 周子翔 黄壹暄
1. 国家管网集团西南管道有限责任公司南宁输油气分公司, 广西 南宁 530000;2. 国家管网集团西南管道有限责任公司昆明输油气分公司, 云南 昆明 650501;3. 国家管网集团西南管道有限责任公司兰成渝输油分公司, 四川 成都 610037
0 前言
随着经济的发展,用户对天然气需求持续增长,尤其在冬季,天然气保供任务更加艰巨,往往需要2台或多台压缩机组并联运行为天然气进行增压。当管道运行处于多机组投用、低流量或压缩机出入口压力有明确限制等工况下,容易使压缩机组发生喘振,损坏压缩机的密封和轴封,破坏压缩机的整体结构,甚至引发火灾爆炸事故[1-3]。为避免进口流量低于喘振流量,通常在压缩机出口处设置防喘阀,实现对压缩机喘振的监测和预防。当进口流量逼近或低于喘振设定流量时,防喘阀迅速打开,使出口天然气回流,补充进口流量,从而避免压缩机发生喘振。通常情况下,防喘阀几乎是预防压缩机喘振最关键的也是唯一屏障,当流量较低或多机组运行时,压缩机容易进入喘振工况,但防喘阀的频繁启动工作会显著降低设备的运行可靠性,增加设备疲劳损坏和故障失效的风险。因此,在压缩机出口处增设旁通回流阀对压缩机喘振进行超前预防是一种有效的工艺设计方式[4]。压缩机出口加装回流阀为压缩机系统提供了一道新的屏障,当压缩机运行工作点靠近喘振区域时,首先控制打开回流阀补充进口流量,使工作点远离喘振区域,若回流阀不足以使压缩机脱离喘振危险,此时防喘阀开启使压缩机逐渐回到正常运行状态。这种双重预防机制在预防喘振后果的同时也为防喘阀提供了有效保护,增强了压缩机防喘振性能的可靠性。但目前回流阀的控制只能通过手动操作,非常依赖于技术人员的经验,回流量过低无法有效缓解喘振风险,回流量过高又会造成资源浪费和压缩机效率低下。因此,有必要对回流阀进行自动控制研究,在保证安全的前提下,最大限度减小回流量,实现降本增效。
1 回流阀应用现状
本文以中缅管道某压气站为研究对象,对压缩机回流阀应用现状进行了调研。该压气站采用2台离心式电驱压缩机组并联运行方式对天然气进行增压,总装机功率22 MW,压缩机防喘振控制系统见图1。当压缩机正常运行时,防喘阀处于关闭状态,当压缩机有喘振风险时,首先开启回流阀补充进口流量以预防喘振现象,当回流阀功能不足以使工作点偏离喘振区域时,防喘阀打开避免压缩机喘振。目前该压气站内压缩机回流阀控制方式属于手动控制,通过值班人员对压缩机防喘振界面进行监视,主观判断压缩机工作点与喘振控制线的距离,调节回流阀的开度。该压气站站控值班室监视界面见图2,其中白线为喘振线,工作点处于白线附近时压缩机进入喘振工况,红线为防喘振线,工作点进入红线左边区域时防喘阀自动开启使工作点向右偏移远离喘振区域。鉴于回流阀超前保护的设计目的,对回流阀的控制趋于保守,通常当工作点与防喘振线的喘振裕度在10%内时,值班人员就会开启回流阀,使工作点远离防喘振线,每次以5%的开度向上调整;当上游流量很小,且工作点与防喘振线非常接近时,值班人员通常会每次以10%的开度调节回流阀。

图1 压缩机防喘振控制系统图Fig.1 Compressor anti-surge control system diagram
为探究回流阀的工作性能,在工作点接近防喘振线时进行了现场开度试验,见图2。当工作点逼近防喘振线时,将回流阀开度设置为10%,随着回流阀开度的增加,压缩机工作点逐渐偏离防喘振线,但进口流量处于波动状态,压缩机运行尚不稳定,在20%开度时,压缩机工作点已经远离防喘振线,稳定运行一段时间发现进口流量逐渐趋于稳步增长状态,此时继续增加开度至30%,虽然又进一步偏移了一点,但实际对压缩机运行并无实质影响。因此在该工况下,20%~30%的开度就足以使压缩机运行趋于稳定,而在趋于稳定后,即可逐渐关闭回流阀。但事实上,出于保守考虑,人工控制仍然会倾向于再观察一段时间再逐渐关闭,同时值班人员也会出现因为工作忙碌而忘关回流阀的情况。为进一步探究该压气站回流阀应用情况,搜集整理上下游基础数据和站场实时数据,对2021年5~6月回流量进行统计分析,见图3。由图3可看出,2021年5~6月这段时间回流量达到35×104~400×104m3/d,回流比最高达13%,压缩机入口流量中回流量占比很大,驱动功率存在大量浪费。因此,压缩机回流阀自动控制研究对于提质增效大有裨益。

a)靠近喘振线a)Near the surge line
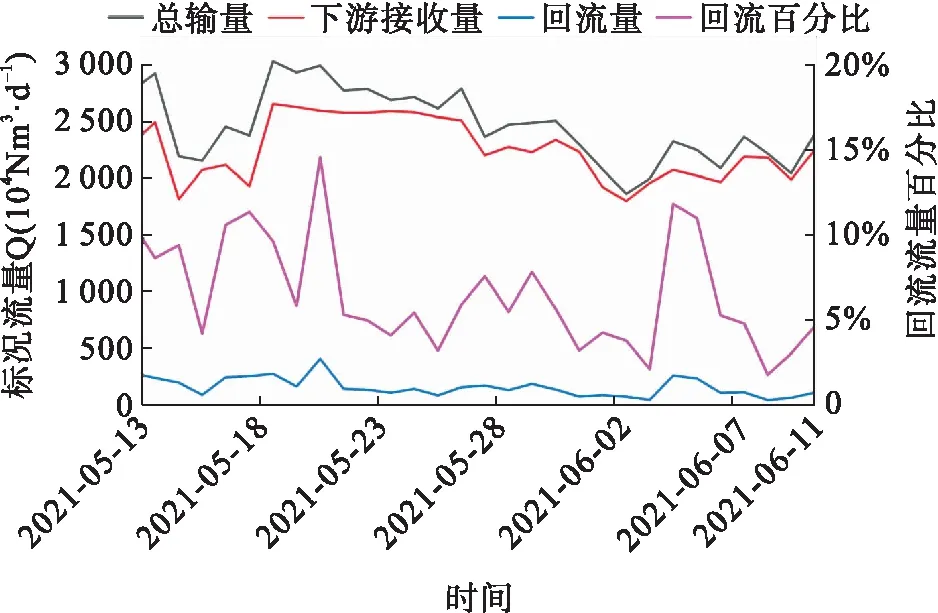
图3 压缩机组回流量分析图Fig.3 Analysis of the return flow of the compressor unit
2 回流阀自动控制方法
当前,国内外采用的防喘振控制方法主要有固定极限流量法[5-7]、可变极限流量法[5-7]、主动控制法[8-10]和模糊控制法[11-13]。固定极限流量法以固定临界流量为限,只要使压缩机入口流量不超过此固定临界流量,压缩机就不会发生喘振,该方法虽简单易行,但会使喘振区域显著增加,造成回流量和能耗增大[14]。对于采用变频驱动的压缩机或压缩机负荷波动频繁的场合,通常采用可变极限流量法进行防喘振控制[15],该方法回避了固定极限流量法能源浪费的缺点,但控制实现较为复杂。主动控制法能使压缩机工作范围扩展至喘振线左侧,使运行效率得以提升,但喘振检测技术的不完善和主动控制算法的复杂性制约了主动控制技术的进一步发展[16-17]。模糊控制法是一种新兴的智能控制方法,无需对控制对象建立精确的数学模型,且对于工况波动和随机干扰具有较好的控制效果[18-20],该方法既保留了自动控制的特点,又回避了人工控制的不精确性,对于实现回流阀自动控制具有经济性、实用性和可操作性。一方面,在实际生产中,压缩机运行状态受设备本体、气质参数和环境变化等多种因素影响,难以建立精确的数学模型,在一定程度上会使传统PID防喘振控制效果难达预期[21];另一方面,回流阀是压缩机喘振预防的辅助设备,主要作用在于控制和缓解恶化或趋向恶化的工况,对其进行精确的自动控制设计是不必要的。因此,本文基于模糊控制思想对回流阀进行自动控制设计。
如图2所示,回流阀启停和开度的控制与工作点到防喘振线的距离有关,因此,对回流阀的控制应首先确定压缩机的特性曲线。人工控制回流阀的策略主要基于工作点与防喘振线的距离以及工作点向防喘振线方向移动的速率这两种情况。一方面,当工作点靠近防喘振线时,人工开启回流阀使工作点远离防喘振区域,向正常运行区域移动;另一方面,即使工作点离防喘振线有一定的距离,但当工作点向防喘振线移动的速率增大,并且有持续恶化的趋势,此时也会开启回流阀进行工况调节。由此可知,进口流量与防喘振设定流量的偏差值和偏差变化率大小是回流阀控制的两个关键参数。因此,本文以这两个关键参数为研究对象进行回流阀自动控制研究。
3 压缩机特性曲线分析
对回流阀进行自动控制研究首先需要明确压缩机特性曲线。初始的特性曲线是基于厂家提供的性能试验工况分析绘制的,不能准确反映工况变化时的压缩机性能,需要将设计条件下的特性曲线转换为实际工况下的特性曲线。由于压缩机实际运行过程中工况多变,很难通过现场实测得到各种工况下的特性曲线,通常采用相似原理对压缩机进行性能换算,计算得到实际工况下的特性曲线[22-25]。由于该压气站压缩机实际运行压比<2.5,采用绝热指数相等、特征马赫数不等的近似性能换算方法。算法具体公式如下:
(1)
(2)
(3)
(4)

根据最小二乘法原理,对经过相似变换后的出口压力(p)、压比(ε)、多变能头(Hpol)、多变效率(η)进行拟合,分别得到转速4 916 r/min、4 500 r/min和4 015 r/min时的特性曲线,见图4。
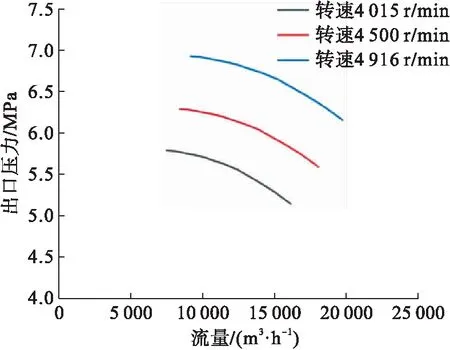
a)出口压力—流量曲线a)p-Q curve
由于回流阀是作为防喘阀前的一道保护屏障而设计的,因此,在分析回流阀调节前,需要先确定喘振线。通过对拟合曲线的进一步分析,确定喘振线和防喘振线,由于该压气站的防喘振线是在喘振线的基础上向右平移10%的喘振裕量,因此确定了喘振线的曲线方程就能相应确定防喘振线的曲线方程。压比—流量曲线的喘振线和防喘振线见图5。
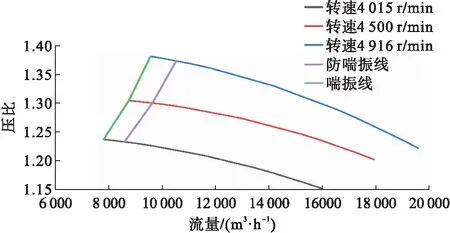
图5 带喘振线的压比—流量曲线图Fig.5 ε-Q curve with surge line
选用该压气站压缩机实际运行参数对拟合的压缩机特性曲线进行验证。对所采集的70个样本点的实测压比和预测压比进行对比,发现两者的误差均不超过1%,见图6。因此,拟合的特性曲线与实际相符合,可以用来进行压缩机运行数据的运算和预测。

图6 特性曲线预测与实测压比对比图Fig.6 Comparison of predicted pressure ratio andactual pressure ratio of characteristic curve
4 回流阀模糊控制算法
对回流阀模糊自动控制算法进行了设计和研究,设计了关于阀门开度的二维模糊控制器,算法计算原理见图7(a、b代表输入信号,c代表输出信号)。首先通过将输入信号进行模糊化处理,基于已有知识和现场经验建立模糊控制规则,最后将规则推理的结果进行清晰化处理转换为数字信号输出。

图7 模糊控制算法原理图Fig.7 Principle of fuzzy control algorithm
4.1 模糊化处理
取压缩机进口流量与其对应的设定流量值偏差(E)及偏差变化率(EC)为输入。由于回流阀是压缩机喘振预防的辅助设备,从实用性和经济性角度没有必要进行精确自动控制设计,因此E范围的设定只需满足工程实际需要即可,如果初始偏差较大,则回流阀初始开启程度较大,如果初始偏差较小,则回流阀初始开启程度也较小。根据现场实际和操作经验,一般在工作点离防喘振线10%左右的工况下开启回流阀进行调节,而该压气站进口流量通常情况下维持在11 000~18 000 m3/h,综合历史调节经验,设定E变化范围为[0,1 300],EC变化范围为[-1 000,1 000](单位均为m3/h)。由于回流阀开度不宜过大,根据工程经验,确定回流阀开度(U)范围为[0,0.35]。E、EC和U的论域分别取为[0,12]、[-6,6]、[0,12],则E和EC的量化因子为KE=12/1 300=0.009,KEC=6/1 000=0.006,U的比例因子为KU=0.35/12=0.029。
根据现场实际,E、EC和U的模糊语言变量值均取为{NB,NM,NS,ZE,PS,PM,PB},对应{负大,负中,负小,零,正小,正中,正大},分别用于描述各变量取值的状态和程度。3个模糊变量的隶属函数见图8~10,离散化后各变量的隶属度见表1~3。隶属函数用于表征一个元素隶属于一个模糊集合的程度,论域中某一元素对应的函数值即为该元素关于此模糊集合的隶属度,函数值越大,则隶属度越大。如本例中U的隶属函数和隶属度见图10和表3,论域元素12隶属于PM和PB的程度分别为0和1,即当论域取值为12时,回流阀开度将开到最大值。

图8 E的隶属函数图Fig.8 Membership function of deviation E

图9 EC的隶属函数图Fig.9 Membership function of deviation change rate EC
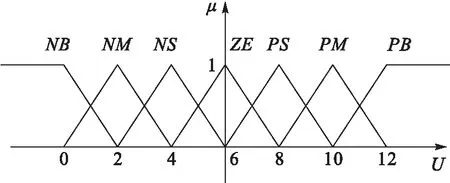
图10 U的隶属函数图Fig.10 Membership function of valve opening U

表1 E的隶属度表

表2 EC的隶属度表

表3 U的隶属度表
4.2 建立模糊控制规则
对输入、输出值的关系进行分析,设计了阀门开度模糊控制规则,总体原则为当进口流量靠近防喘振线时,回流阀开启以补充进口流量,进口流量越靠近防喘振线,即E越小,则阀门开度越大;当E较大时,综合考虑EC的大小对阀门开度进行调节。分析得到的49条模糊控制规则见表4,表4中的模糊控制规则可转化为“IF-THEN”条件语句模式。表5展示了对部分模糊控制规则的解释,如表5所示,第1条规则是“IF(E is NB)and (EC is NB)Then (U is PB)”,即如果偏差距离很小且偏差有向防喘振线方向靠近的强烈趋势时,则回流阀开启程度非常大;第2条规则是“IF (E is NB)and (EC is ZE)Then (U is PB)”,即虽然此时偏差变化率为零,但由于偏差距离很小,此时应将回流阀开到足够大以防止情况恶化;第3条规则是“IF (E is NB)and (EC is PB)Then (U is PS)”,表示如果偏差距离很小,而偏差有回到正常工作区域的强烈趋势,考虑到此时偏差距离很小,保守起见仍将回流阀需开启到中偏上的程度;第4条规则是“IF (E is ZE)and (EC is NB)Then (U is PB)”,即如果偏差距离适中且偏差有向防喘振线方向靠近的强烈趋势时,则回流阀开启程度非常大;第5条规则是“IF (E is PB)and (EC is NB)Then (U is PS)”,表示虽然偏差有向防喘振线方向靠近的强烈趋势,但由于此时偏差距离很大,先将回流阀需开启到中偏上的程度,视后续情况再行调整;第6条规则是“IF (E is PB)and (EC is NS)Then (U is ZO)”,即如果偏差距离很大且偏差有向防喘振线方向靠近的趋势时,则回流阀需开启到中等程度;第7条规则是“IF (E is PB)and (EC is PB)Then (U is NB)”,表示虽然偏差有向远离防喘振线方向变化的强烈趋势,但由于此时偏差距离很大,只需稍微开启回流阀即可。值得注意的是,这里所提到的偏差距离远近只是在论域范围讨论,如果工作点与防喘振线的距离非常远,已经超出论域范围,说明此时压缩机工况稳定,也就无需开启回流阀。其他模糊控制规则可参照表5的示例解释,本文不再赘述。
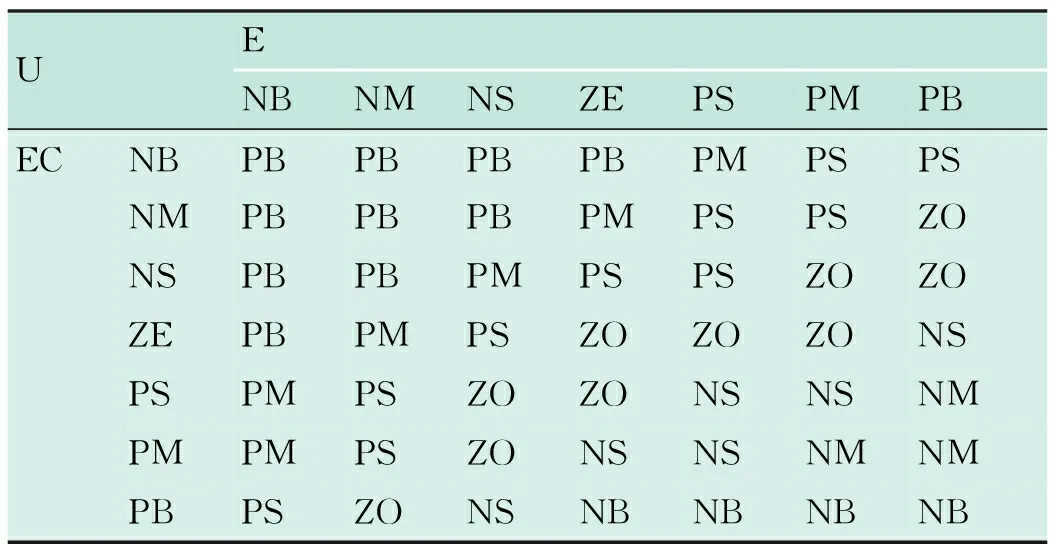
表4 阀门开度模糊控制规则表

表5 模糊控制规则的解释表
15
4.3 清晰化处理
通过对模糊控制规则进行编程计算,将模糊控制规则清晰化,建立模糊控制查询表输出系统能够识别的数字信号。阀门开度模糊控制查询见表6。通过查询表6得到论域范围的阀门开度值,乘以比例因子即可得到实际的阀门开度输出值。

表6 阀门开度模糊控制查询表
5 回流阀模糊控制系统设计
回流阀控制系统设计原理见图11。首先,系统实时监测进口流量和设定流量的状态,对二者的偏差值进行检测,判断是否需要对回流阀进行调节,其中不同转速下的防喘振设定流量值通过第3节“压缩机特性曲线”拟合所得的特性曲线计算得到。如果偏差值大于设定值,则无需开启回流阀,如果偏差值不大于设定值,则触发模糊控制器,模糊控制器根据E和EC对U进行调节,防止进口流量进一步靠近防喘振线。
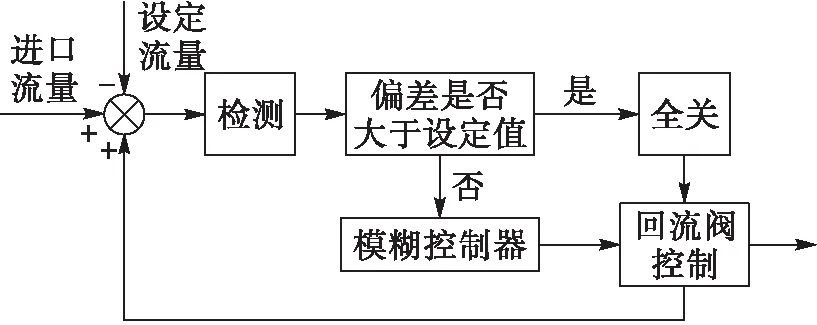
图11 回流阀控制系统原理框图Fig.11 Principle diagram of the return valve control system
基于MATLAB Simulink软件建立回流阀模糊控制系统仿真模型,实施回流阀开度状态动态模拟。回流阀模糊控制系统仿真模型见图12,该系统包含两个子系统,分别是图13所示的大偏差子系统和图14所示的模糊控制子系统。控制系统对进口流量和设定流量进行在线采集,通过条件判断控制器判断偏差值是否>1 300 m3/h,如果>1 300 m3/h则无需开启回流阀,否则触发模糊控制子系统对回流阀进行调节。

图12 回流阀模糊控制系统仿真模型图Fig.12 Simulation model of the return valve fuzzy control system

图13 大偏差子系统仿真模型图Fig.13 Simulation model of large deviation subsystem

图14 模糊控制子系统仿真模型图Fig.14 Simulation model of fuzzy control subsystem
6 结果分析
6.1 回流阀开度仿真结果
为验证模糊控制系统的有效性和可靠性,对自动控制效果和手动控制效果进行对比,模拟采集了1 000 min的数据,通过实时检测、判断和模拟得到该时间段回流阀开度调节过程,见图15。在实际手动控制的1 000 min数据中,回流阀在不同时间段分别粗略地开启到10%、15%、20%、25%和30%的开度,而图15的自动控制结果显示,回流阀能根据压缩机实际工况实时动态调整开度,回流阀最大开度达到27%,不需要开启的时候保持关闭状态,避免资源浪费。仿真结果显示,该控制系统能对回流阀状态进行有效控制。

图15 回流阀开度仿真结果图Fig.15 Simulation results of the return valve opening
6.2 自动控制与人工控制对比
通过搭建的控制系统采集模拟了1 000组数据,结果显示所搭建的自动控制系统能根据实际工况变化有效控制回流阀开度状态。图16显示了部分人工控制和自动控制的数据对比。由图16可看出,该时间段内,回流阀开度被人为设置为30%,而自动控制模拟过程回流阀开度远小于30%,且能根据工况变化逐渐减小开度,最后完全关闭回流阀。该时间段对应的现场实际是,压缩机工作点非常接近防喘振线,值班人员将回流阀调至30%开度操作后,工作点逐渐远离防喘振线,且运行在较为舒适的正常工作区域,此时,值班人员因为忙于事务却忘记关闭回流阀。表7显示了所采集模拟的1 000组数据下回流阀开度情况,其中,人工控制的数据是实际操作过程中值班人员凭经验设置的开度,而自动控制数据是实时动态变化的,表7中自动控制数据是在某一特定人工控制开度状态下,通过自动控制方式所得到的同一时间段的平均开度值。例如,在人工控制方式下回流阀开度设置为10%的期间,自动控制方式所得到的回流阀平均开度为12.5%,而在回流阀开度被人为设置为30%的期间,自动控制方式所得到的回流阀平均开度为14.3%。对比结果显示,自动控制比人工控制平均回流量减少了6.3%,节能降耗效果显著。

图16 人工控制和自动控制结果对比图Fig.16 Comparison of manual control and automatic control results
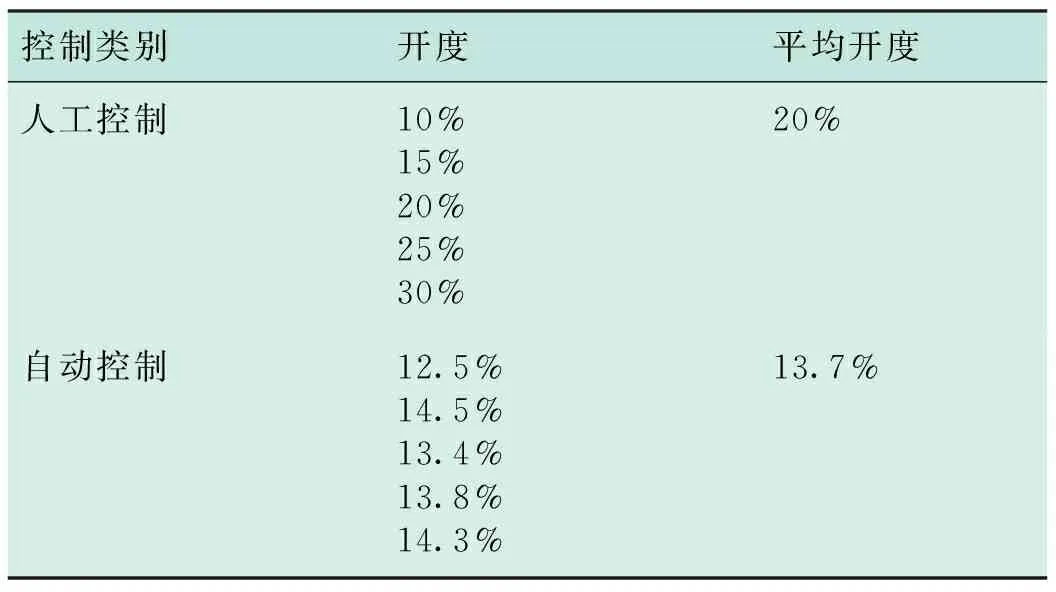
表7 不同控制类别回流阀平均开度对比表
6.3 经济效益分析
根据该压气站天然气输送情况,以2 300×104m3/d的转供量计算,压缩机组电能损耗约21.56×104kW·h,相当于每100×104m3的转供量需要消耗电能0.937 4×104kW·h。而回流阀开度30%情况下,回流量约200×104m3/d,以自动控制实现回流阀开度减小5%计算,即每天减少回流量约33.33×104m3,节约电能则为3 124.67 kW·h。因此,全年节约电能可达到114.05×104kW·h。根据当前电价0.573 1元/(kW·h)计算,全年预期节约电费65.36万元。
7 结论
1)本文以提质增效、节能降耗为目的,对回流阀进行自动化控制设计,在深入调研分析回流阀应用现状基础上,通过现场大量实测数据分析站场每日回流量情况,论证了回流阀自动控制设计的必要性。
2)基于相似原理对设计条件下的压缩机特性曲线进行性能换算,得到实际工况下的特性曲线,通过与现场实测数据进行对比,发现预测误差不超过1%,验证了换算后特性曲线的可靠性和适用性。
3)综合考虑进口流量与设定流量的E和EC对U的影响,建立了关于阀门开度的二维模糊控制器,基于MATLAB Simulink软件建立了回流阀控制系统仿真模型。仿真分析结果显示,自动控制较人工控制平均回流量减少了6.3%,预期节省电费65.36万元/a,仿真分析成果可为后续离心式压缩机防喘振设计和运行优化提供理论参考和技术指导。
猜你喜欢
科学与财富(2021年33期)2021-05-10
北京汽车(2021年2期)2021-05-07
成都信息工程大学学报(2021年6期)2021-02-12
发电技术(2020年3期)2020-06-29
电子制作(2019年22期)2020-01-14
电子制作(2019年16期)2019-09-27
戏剧之家(2018年21期)2018-10-19
电子制作(2017年13期)2017-12-15
学苑创造·C版(2016年10期)2016-11-19
海峡科技与产业(2016年3期)2016-05-17
