基于信息融合的移动机器人全局避障路径规划算法
2023-01-17 09:26周婷
宁夏师范学院学报 2022年10期
周 婷
(安徽三联学院 基础实验教学中心,安徽 合肥 230071)
移动机器人被广泛应用于多个领域,其工作环境也日益复杂化.在包含众多障碍物的环境中,为了保证机器人正常工作,需要采用路径规划算法建立一条可行路线,避免与障碍物发生碰撞[1].根据规划路径控制机器人行驶方向,辅助移动机器人顺利完成工作任务[2].目前,为了实现全局避障路径规划,已经涌现了多种规划算法.
文献[3]采用栅格法描述全局障碍物分布情况,按照机器人投影面积,设置栅格大小,并针对每一个栅格,建立多阶障碍物矩阵.根据障碍物分布状态,通过邻域搜索方式生成一条机器人运行路径.同时,引用改进代价函数,根据地形条件更新路径规划方案.但是,该算法规划路径避障效果较差.文献[4]参考传统规划算法生成的路径,提取出关键转折点,以此为圆心采集周围区域环境信息.根据障碍物距离信息,通过变距离算法优化关键点,重构移动机器人运行路径.但是,该算法规划路径总里程较长.文献[5]构建两棵搜索树,在全局范围内交替搜索避障关键点,并对每个节点进行目标偏置扩展.针对选定的节点进行布线,并运用增强算法计算障碍物对节点的影响.最后,通过碰撞检测和冗余节点修剪等处理方式,验证布线路径的可行性.但是,该算法规划路径的平滑性较差.
文中为了解决传统路径规划算法的不足之处,提出采用信息融合算法,融合不同传感器采集的环境信息,精准定位移动机器人所处位置,以此为基础建立全局避障路径规划算法.尤其面对密集障碍区,文中提出根据机器人动态位置信息,从障碍物之中,建立一条安全可行的行驶路径,达到缩短规划路径总里程的目的.
1 基于信息融合的移动机器人全局避障路径规划算法设计
1.1 构建全局环境栅格模型
为了实现全局避障路径规划,文中采用栅格法建立机器人运行环境场景模型[6].栅格大小直接影响环境建模效果,本文以移动机器人直径为依据设置栅格长度,全局环境地图的总栅格数可以通过以下公式计算,
(1)
上式中,N表示环境地图总栅格数,W表示地图长度,A表示地图宽度,f表示栅格长度,也是移动机器人直径.全局环境地图的总栅格数N的计算是根据全局地图的长度、宽度与栅格长度之间的比值相乘计算,获得了总栅格数.
通常情况下,全局环境模型的单元栅格包含两种状态,分别是包含障碍物的栅格以及空白的自由栅格.为了将不规则形状的障碍物在栅格中描述出来,文中提出采用膨胀处理的方式,通过元素“探针”进行平移探索,生成膨胀后的障碍物栅格,障碍物栅格膨胀处理模式如图1所示.
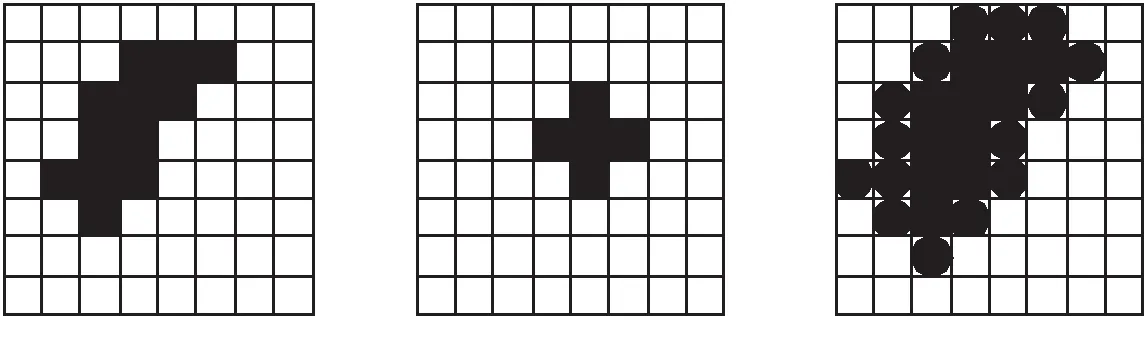
(a) 目标图像 (b) 结构元素 (c) 膨胀结果
按照图1所示的膨胀处理模式,将障碍物所处位置直观表示出来,考虑到膨胀法的运用,会形成部分未清扫区域,影响路径规划结果[7].因此,提出在全局环境栅格模型构建过程中,栅格主要包括四种状态,分别是大型障碍物完全占据栅格、大型障碍物边界占据栅格、小型障碍物栅格以及不含障碍物栅格.其中,全局避障路径规划过程中,障碍物边界占据栅格与小型障碍物占据栅格,可以当作自由栅格来看,便于避障路径的规划.
1.2 设计信息融合定位方法
为了避免环境特征信息片面性现象,引发的移动机器人定位不精确问题,提出信息融合定位方法,融合多个传感器的定位信息,精准定位机器人所处位置,面对障碍物较为集中的区域[8],不再从外侧绕行,而是从障碍物群中间安全穿行,实现规划路径总里程的缩短.文中提出在移动机器人上布置里程计和麦克风阵列,移动机器人运动后,得到图2所示的示意图.
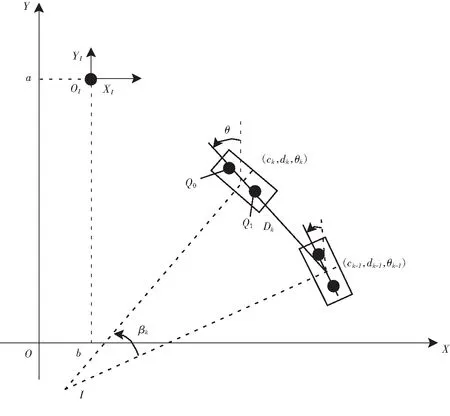
图2 移动机器人运动示意图
为了结合里程计和声源信息,需要先分别计算二者所描述的机器人定位值.如图2所示,机器人的位姿变化,主要是沿着圆弧运动[9],依托于上一时刻的里程计定位值,得到当前时刻里程计定位值.
(2)
公式(2)中,k表示时刻,(c,d,θ)表示机器人位姿,(ck,dk,θk)表示k时刻机器人位姿,(ck-1,dk -1,θk-1)表示k-1时刻机器人位姿,D表示机器人移动距离,β表示机器人方向角变化值,cos表示余弦函数,sin表示正弦函数.其中
Pk=Pk-1+Sk,
(3)
公式(3)中,P表示里程计显示的机器人位姿,S表示位姿增量.
采用声源定位技术,根据麦克风阵列的平面投影和距阵列中心距离等参数信息,得出声源在二维平面上的坐标信息.
(4)
公式(4)中,(x,y)表示声源平面坐标,v表示声速,δ1、δ2、δ3、δ4表示声源到达时间延迟,η表示麦克风到阵列中心的距离.
图2中,(a,b)表示麦克风阵列的位置,Q0、Q1表示两个声源,XIYIOI表示声源定位坐标系.两个声源呈现出对称分布特点,在全局坐标系中,机器人位姿表示为
(5)
公式(5)中,(xQ0,yQ0)表示声源Q0的坐标,(xQ1,yQ1)表示声源Q1的坐标,arctan表示反正切函数.
里程计定位信息与声源定位信息的融合本质上是当某一项定位技术所得信息不可靠时,采用另一项技术所得的定位结果为参考,确保最终定位结果误差范围较小.依托于机器人历史定位信息,和里程计显示数据,得出当前位姿估计结果,再结合麦克风阵列测量的定位值,将机器人位姿表示为
ψ=φ″+t×μt,
(6)
公式(6)中,ψ表示当前机器人位姿,φ″表示麦克风阵列测得的机器人位姿,t表示最后获取声源定位信息的时刻,μ表示里程计测得的位姿增量.
1.3 建立移动机器人避障方案
根据机器人当前位置信息,文中采用人工势场法,提出引力势函数和斥力势函数[10],建立移动机器人避障方案.其中,引力势函数可以表示为
(7)
公式(7)中,H表示引力势函数,e表示大于零的引力势场常量,ω0表示机器人位置向量,ω1表示目标位置.
斥力势函数可以表示为
(8)
公式(8)中,G表示斥力势函数,λ表示常量系数,z表示机器人与障碍物的最短距离,z0表示障碍物在市场中影响范围.
通过引力和斥力的共同作用,得到一条安全的运动路线.为了避免移动机器人避障路径规划结果出现局部最小点问题,本文进一步改进了传统的人工势场算法,实现全局避障路径规划.根据机器人定位结果,以其所处位置为原点设计一个坐标系,并引出一条与目标点相切的直线,以机器人到切线的长度为半径,生成避障路径规划范围扇形图,并将其划分为两个区域,如图3所示.
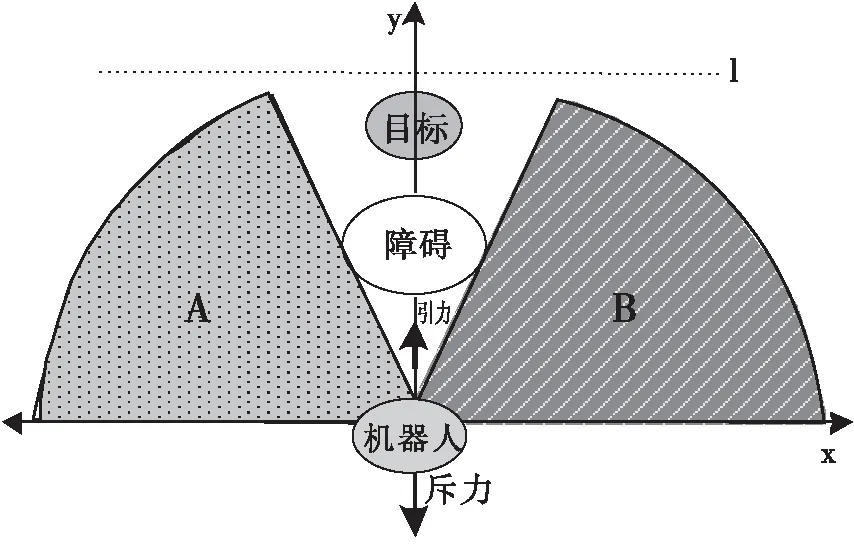
图3 避障路径范围规划
如图3所示,明确避障路径规划范围后,采用人工势场法编写避障方案.首先判断两个避障路径规划区域内是否包含其他障碍物,若没有则可以直接计算机器人与目标点直接的距离,以及机器人与障碍物之间的间距,搜索到最优避障方向.若区域内包含其他障碍物,需要求解障碍物坐标向量,计算出该障碍物产生的斥力,重新得出合力方向.按照上述方案,完成移动机器人避障路径规划.
1.4 生成全局路径规划结果
依托于机器人避障方案生成初始全局避障路径后,针对转弯问题设计相应的防碰撞策略,生成最终路径规划结果根据机器人转弯半径和圆心,得到圆心转动方向,以及位置.
(9)
公式(9)中,J表示移动机器人转弯圆心,R表示转弯半径,(xJ,yJ)表示圆心坐标,M0表示圆心方向,M1表示起始点方向,ξ表示圆心转动方向.
机器人顺时针方向转弯过程中,可以根据圆心方向和转弯点坐标,求解转弯起始点与转弯目标点之间的间距,以及转弯斜率和转弯角度.
(10)
公式(10)中,τ1表示转弯起始点,τ2表示转弯目标点,E表示两点间距的长度,FL表示圆外切线,ϑ表示斜率,κ1表示离开第一段弧的角度,κ2表示到达第二段弧的角度.
按照上述转弯策略,将机器人转弯问题拆分为两个分段,确保转弯角度平缓,避免移动机器人运行出现碰撞问题.至此,完成移动机器人全局避障路径规划算法的整体设计.
2 实验
2.1 实验准备
为了验证本文设计算法的可行性,以扫地机器人为实验对象,进行全局避障路径规划.本次实验选定的机器人直径和高度分别为30 cm和12 cm,在该机器人顶部位置安装雷达,并在下方电路板上连接编码器、麦克风阵列等传感设备.在空旷的场所内,应用多种物品充当障碍物,设置实验场景.将扫地机器人放置在实验环境中,进行避障路径规划,部分实验环境实景图如图4所示.
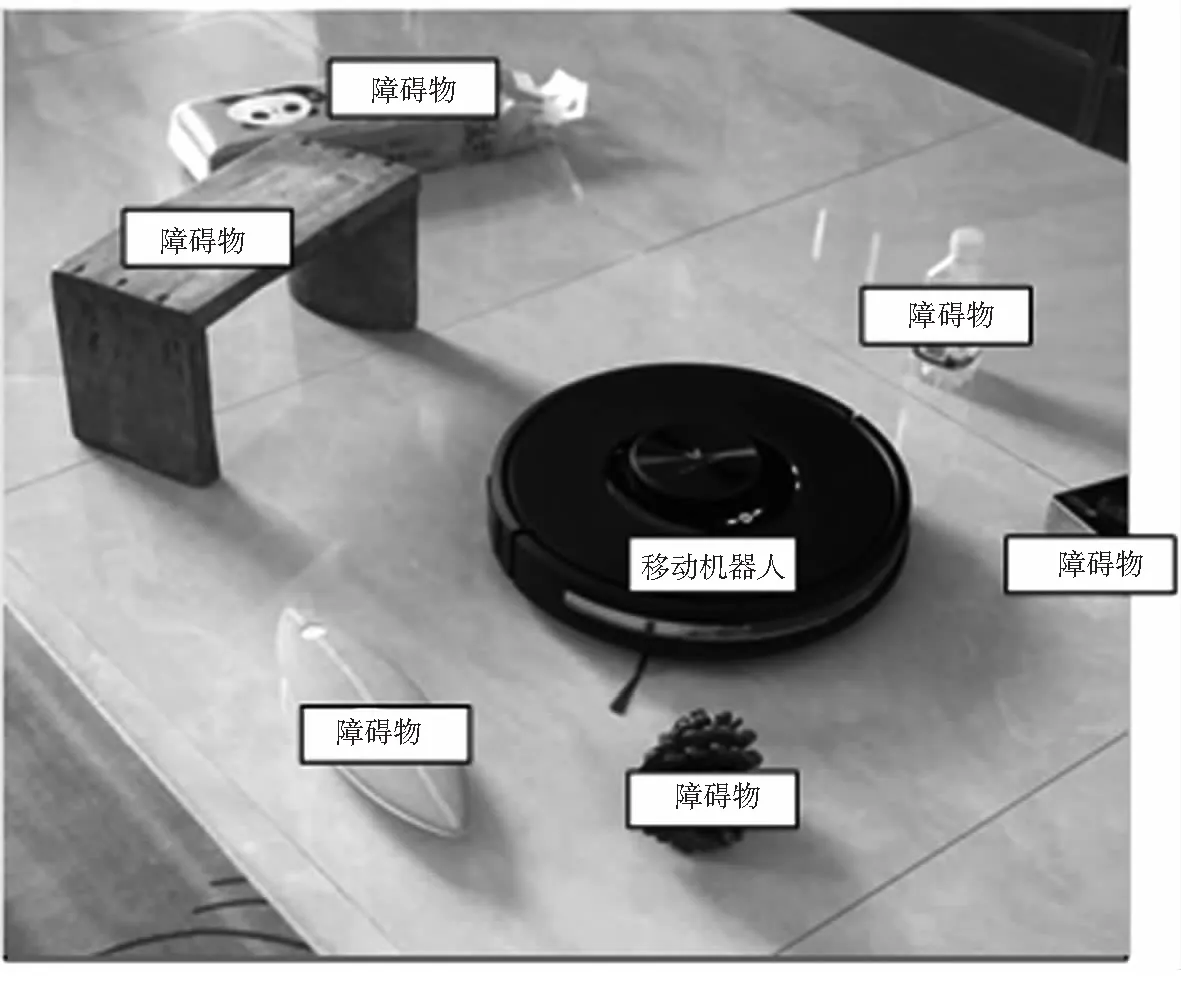
图4 部分实验场景图
根据本文研究内容,在实验开始之前,启动扫地机器人在实验场景内行走一周,获取环境栅格地图.再将机器人放置在起点位置,明确机器人运行终点生成全局避障路径.
2.2 实验环境栅格图
为了保证路径规划结果的全局性,通过栅格化技术,模拟实验场景障碍物分布图,得到图5所示的实验环境栅格图.

图5 实验环境栅格图
从图5可以看出本次实验环境中障碍物大小不一,分布范围广泛,符合机器人全局避障路径规划实验要求.其中左下角圆形标注单元格为机器人起始点,右上角五角星标注的单元格,为移动机器人运行的目标点.
2.3 避障路径规划结果
在实验场景中,运用文中提出的路径规划算法得出全局避障路径.为了表现文中设计算法的优越性,选用基于动态窗口算法DWA和基于免疫机理的路径规划算法作为对照组,同样进行全局避障路径规划,得到图6所示的规划路径对比图.
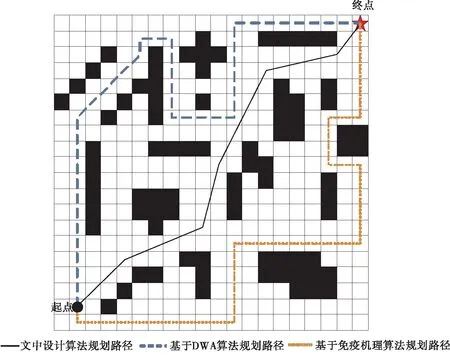
图6 不同算法规划路径对比图
根据图6所示的规划路径对比图可以看出,三种算法所规划的路径,均避开了障碍物,呈现出了良好的避障效果.其中,基于DWA算法和基于免疫机理算法由于无法精确定位机器人实时位置,面对密集的障碍物区域,均选择向上或向下绕行,虽然达到了避障效果,但规划出的路径总里程较长.本文提出的算法由于引入了信息融合理念,结合了里程计和声源信息,完成了机器人运行位置的精确定位,再进行全局避障规划,从障碍物群中间穿行而过,达到避障效果的同时,缩短了规划路径的总里程.为了便于定量分析,汇总三种算法规划路径总里程信息,得到表1所示的总里程对比表.

表1 不同算法规划路径总里程统计表
根据表1可知,文中设计算法规划路径的总里程为15.7 m,基于DWA算法、基于免疫机理算法规划出的路径,总里程分别达到了21.5 m和23.1 m.综上所述,以信息融合技术为基础,建立的避障路径规划算法,与其他算法相比总里程缩短了26.97%和32.03%.
3 结束语
移动机器人的发展直接促进了工业自动化的进步.随着人们对机器人的要求越来越高,机器人全局避障路径的规划成为关键的研究问题之一.本文以该问题为研究重点,参考传统路径规划算法,针对定位误差引发的避障路径总里程较长的问题,提出运用信息融合技术,结合里程计定位信息和声源定位信息,获取实时精确定位信息,以此为基础,得到一种新的全局避障路径规划算法.
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
北京航空航天大学学报(2022年6期)2022-07-02
科技创新与应用(2021年31期)2021-11-09
中北大学学报(自然科学版)(2020年4期)2020-07-13
电子制作(2019年23期)2019-02-23
制造技术与机床(2017年3期)2017-06-23
噪声与振动控制(2016年5期)2016-11-09
弹箭与制导学报(2015年1期)2015-03-11
舰船科学技术(2015年8期)2015-02-27
雷达学报(2014年4期)2014-04-23