
基于ADS-100航空影像的北京市正射影像数据制作
2023-03-09 07:06郑岳泽李楚钰王梓琪王建楠
北京测绘 2023年8期
郑岳泽 李楚钰 周 庆 王梓琪 王建楠
(1.北京市测绘设计研究院,北京 100038;2.城市空间信息工程北京市重点实验室,北京 100038)
0 引言
数字正射影像图(digital orthophoto map,DOM)长期以来被认为是标准地图的补充或替代,不仅可以直观地反映城市地貌的现状信息,高分辨率的正射影像数据还可以弥补地形图数据在困难地区更新不及时、大比例尺地形图不全等问题[1-4]。北京市作为全国的政治、经济、文化中心,开展全市域正射影像生产工作对于自然资源调查、城市规划、城市基础设施建设、重大工程项目施工选址等具有一定的实际意义。本次全市域航空影像获取采用的ADS-100(airborne digital sensor 100)航摄仪是徕卡公司在2013年推出的一款推扫式航空相机,与传统的框幅式相机相比,每条扫描线均有相应的外方位元素,在影像制作时所用的地面控制点较少,且高程精度高[5-7],对像控点依赖小且同名点匹配无须像传统航片一样对点位位置和数量有严格限制,因此不受航片落水影响,详细参数见表1。
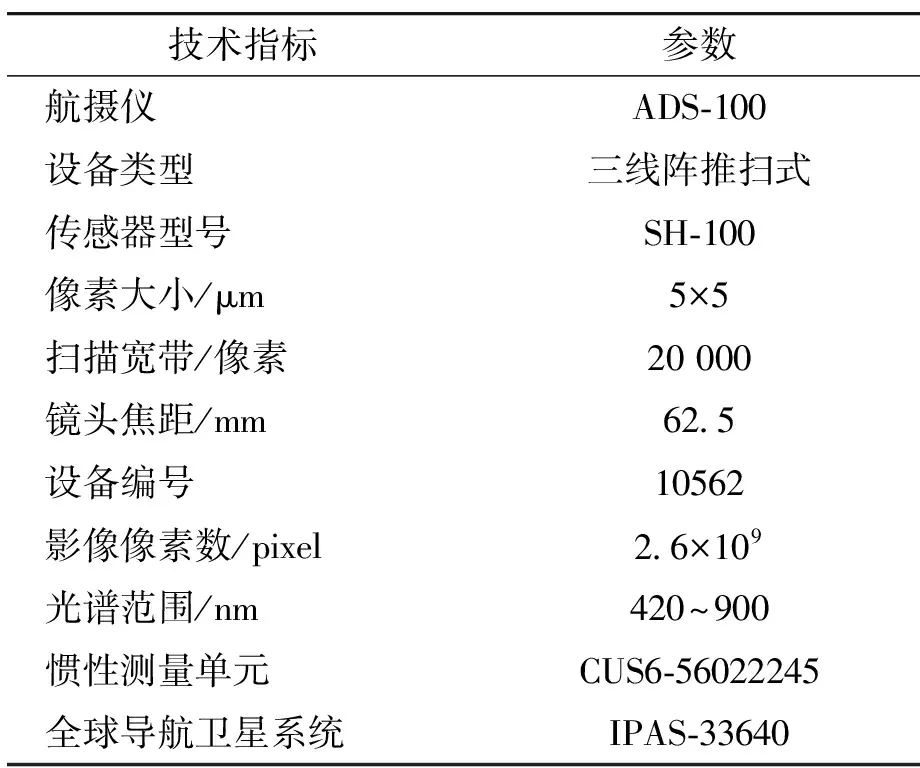
表1 ADS-100航摄仪主要技术指标
1 研究区概况
北京摄区总面积为16 410.54 km2,其中山区面积10 200 km2,约占总面积的62%,平原区面积为6 200 km2,约占总面积的38%。航飞路线总长度14 020.73 km,航摄时间总计约74 h,根据每架次航摄位置以及航线长度,将全市域分为18个空三加密分区,逐个进行平差计算。为保证数据处理精度,采用对应航摄时间、对应覆盖范围内16个北京市连续运行参考站(continuously operating reference stations,CORS)数据对原始航飞的定位定姿系统(position and orientation system,POS)数据进行校正。
2 正射影像制作流程
ADS-100正射影像生产作业流程如图1所示。

图1 ADS-100正射影像生产流程
2.1 数据预处理
数据预处理阶段首先是对ADS-100下载的原始航飞数据进行质量检查,一是检查原始数据覆盖范围,确保航线完全覆盖测区,将补飞、作废航线数据进行统计整理;二是检查航飞数据是否满足质量要求,确保影像纹理清晰,无明显的拉花、扭曲、变形、云雾遮盖等。其次,将全球定位系统(global positioning system,GPS)/惯性测量单元(inertial measurement unit,IMU)数据与地面CORS基站数据进行联合处理[8],获取高精度外方位元素的初始值,利用该数据将原始的影像进行解压、预处理、生成金字塔(Lov)等处理步骤得到L0级影像数据,用于空中三角测量作业。
2.2 空三加密
空中三角测量前首先根据空三分区合理进行像控点布设[9],ADS-100航摄仪携带的高精度GPS/IMU数据可以确保影像在曝光时获取照片准确的姿态数据,因此可以实现少量地面控制点的条件下完成目标的三维定位。其次,利用XPro软件为各个分区新建空三加密工程进行连接点自动匹配,连接点的数量根据影像纹理特征由程序自动匹配生成,匹配连接点一般情况下应均匀分布在影像上,对于地物特征不明显的山区,应适当调整连接点选取方案[10-11],保证有足够的连接点参与平差。自由网平差并优化中连接点取舍应满足一定的规则:
(1)高于亮度重叠。
(2)连接点平面、高程中误差应在一个像素以内(≤0.20 m)。
(3)连接点不足的区域应人工添加少量连接点。
完成自由网平差后进行人工控制点转刺并进行约束网平差和控制点残差检核工作,进行测区之间空三加密接边工作后输出空三加密成果,空三精度应满足表2中的数据。
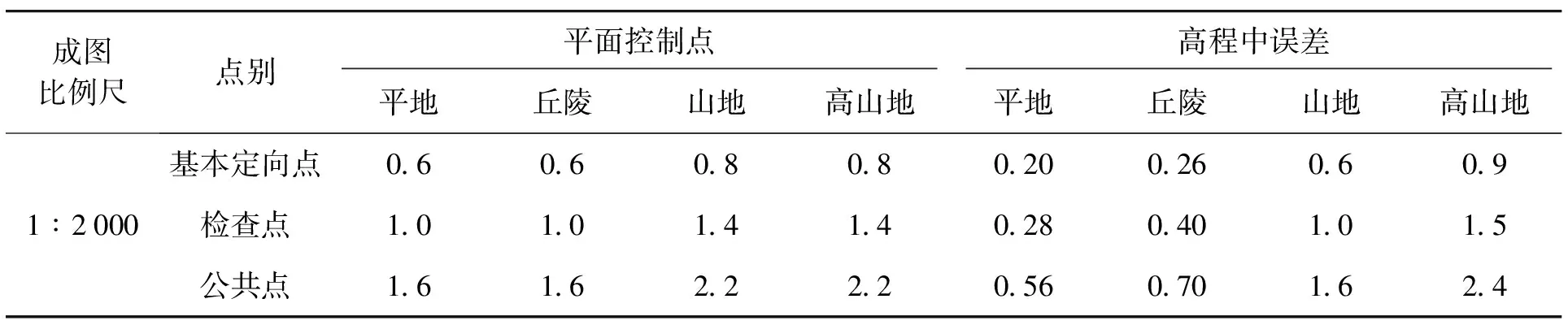
表2 像控点和检查点精度评价 单位:m
2.3 影像制作
影像制作部分主要是对空三加密后的L1数据结合数字高程模型(digital elevation model,DEM)进行正射纠正并对纠正后的数据进行编辑[12],该过程实现平台为法国像素工厂摄影测量数据处理软件[13-14]。
2.3.1正射校正
通过将坐标从像方空间转换到物方空间,并消除倾斜和起伏位移,将透视图像几何调整为正射图像的过程,在该过程中数字高程模型是正射校正处理的主要输入,数字高程模型中的垂直和水平误差都会传播到生成的数字正射影像中,在正射影像中表现为平面(水平)误差,随着局部地形的增加,数字高程模型的质量对正射校正过程变得更加重要[15-16]。因此,在本项目中,采用我院2015年激光雷达点云生成的2 m分辨率数字高程模型作为正射校正的基础数据。
2.3.2镶嵌线编辑
影像镶嵌是正射影像制作中较为关键的一步。正确的镶嵌线应该避免建筑物、构筑物等区域形成几何错位,并且保证镶嵌线两侧颜色过渡自然。本项目中,编辑镶嵌线时绕开了人工建筑物、水体、桥梁等,尽量沿着边界清晰处进行编辑,如图2所示。
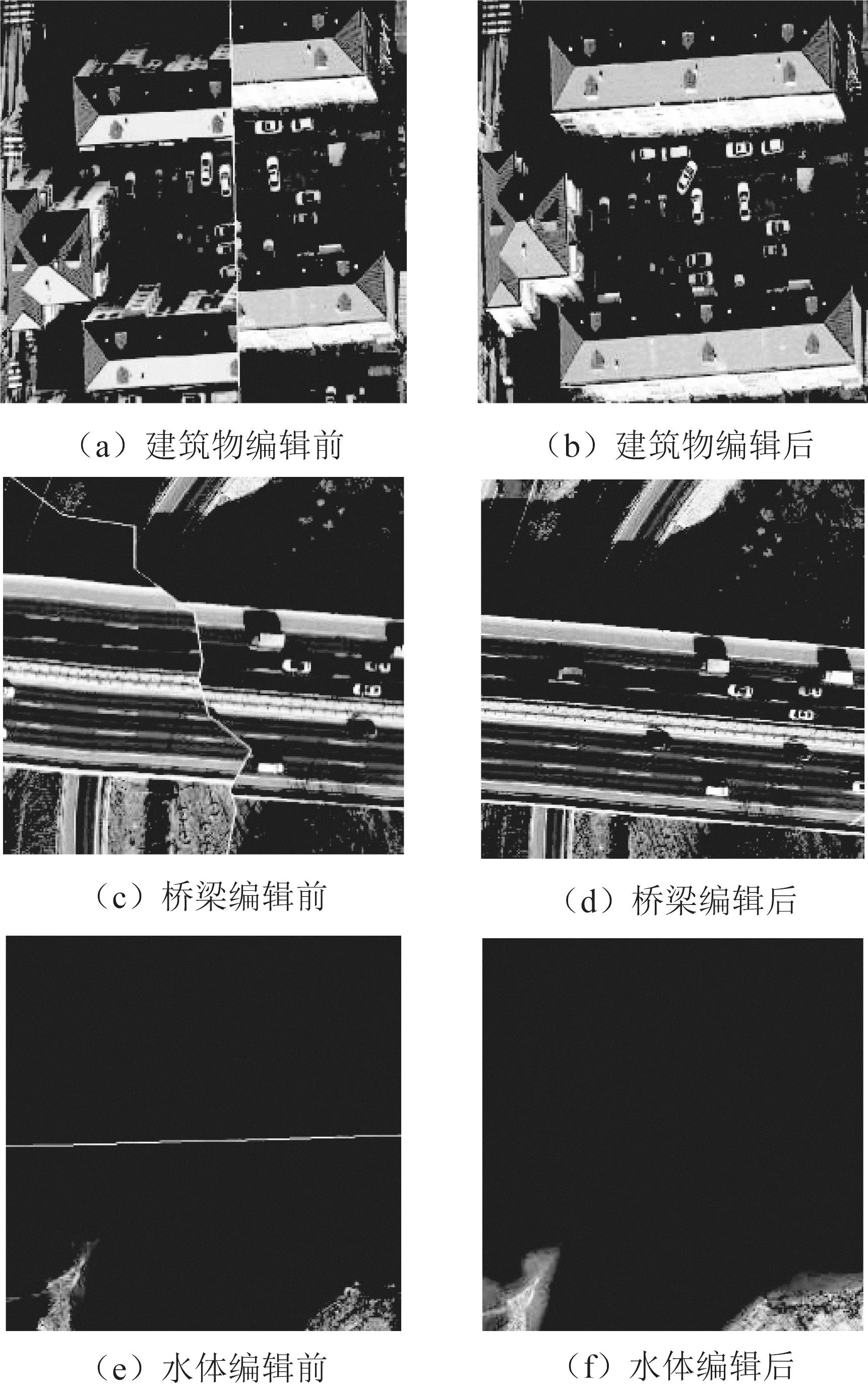
图2 镶嵌线编辑示意图
2.3.3影像编辑
影像编辑部分使用我院自主研发的影像编辑软件对影像进行局部的编辑处理工作。北京市三面环山,地势起伏大,受限于中心投影的影像获取方式,在经过正射纠正后,地形剧烈变化的区域会产生影像拉花现象。由于项目中使用我院2015年DEM成果进行正射纠正,虽然节约项目成本,但DEM实效性较差,土地利用有变化的区域会在纠正后产生区域内房屋、道路等地物扭曲的情况。为解决以上问题,满足正射影像生产标准,通常需要人工寻找问题区域,并到相应的纠正影像或原始影像中寻找对应区域的原始纹理,使用Photoshop软件进行影像替补贴图,以此进行影像问题修正,完成影像编辑工作,如图3所示。
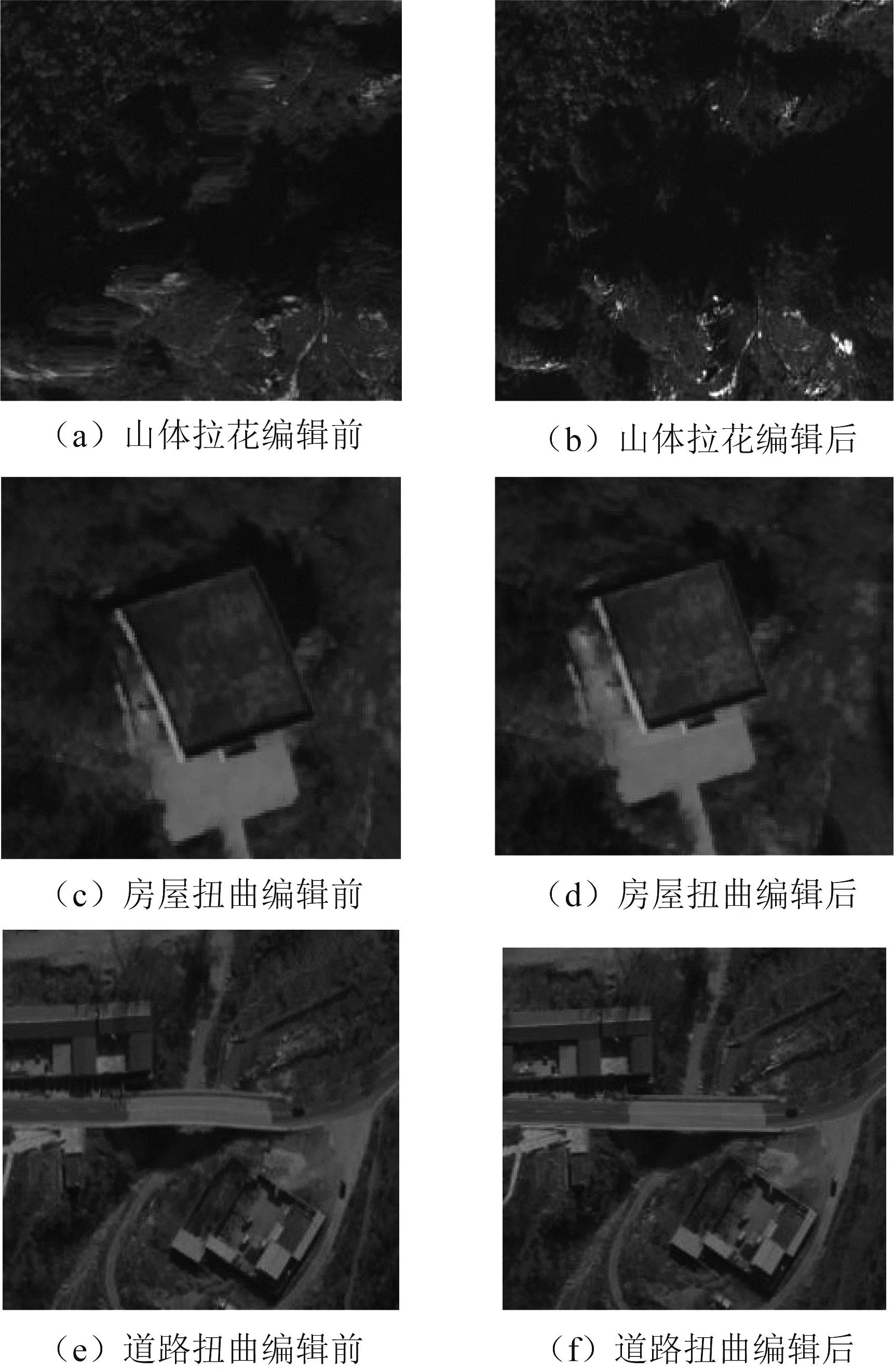
图3 影像编辑示意图
3 精度分析
3.1 空三精度分析
为了检查ADS-100空三加密精度,本项目将外业测量的225个控制点坐标作为理论值,利用MapMatrix软件测量其在立体模型下的坐标,从而对空三加密结果的精度进行验证,对原始外业坐标与立体量测坐标进行统计,可以计算本项目中各分区控制点平面与高程中误差精度统计结果,如表3所示。
各区控制点误差分布情况如图4所示。
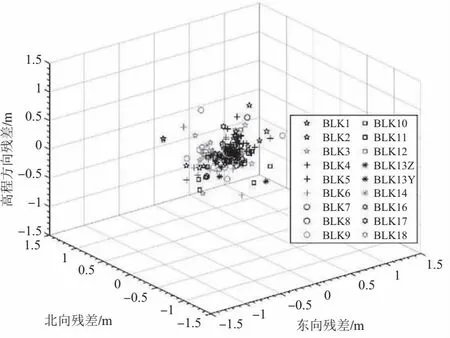
图4 各分区控制点误差分布图
本项目中选取153个检查点对外业坐标实测值与立体模型量测值进行统计,可得检查点平面X中误差为0.197 m,平面Y中误差为0.223 m,高程中误差为0.198 m,满足表2中相关精度要求。检查点坐标误差分布情况如图5所示。
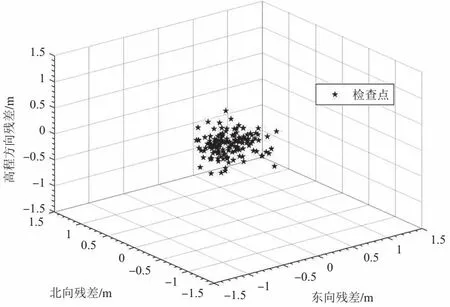
图5 检查点误差分布图
航区公共点接边平面和高程较差中误差不得大于表2中规定的数据,各分区接边精度如表4所示,满足相关精度要求。
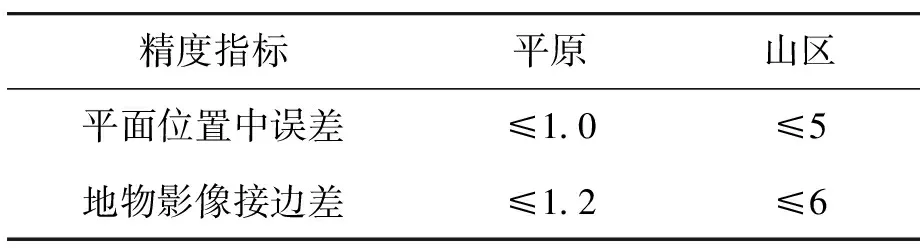
表4 正射影像成果精度评价表 单位:m
接边公共点坐标误差分布情况如图6所示。
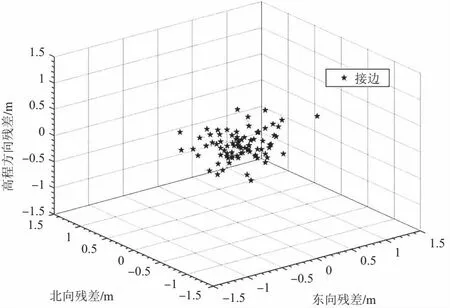
图6 接边误差分布图
3.2 DOM成果精度分析
为达到国家相关技术标准成果成图要求,还需要在北京市市域范围内选取平均分布的若干检查点,将选取的检查点的真实坐标与正射影像中的观测坐标相比较,验证正射影像成果平面精度。
本项目共选取215个检查点进行正射影像精度验证可得,检查点的真实坐标与正射影像观测坐标的差值一般在0~2个像素范围内,平面误差最大值为0.66 m,最小值为0 m,中误差为0.28 m,满足成果数据平原区平面位置中误差不大于1 m的精度要求。正射影像数据精度要求见表4。
图7为检查点的真实坐标与正射影像观测坐标差值分布情况。
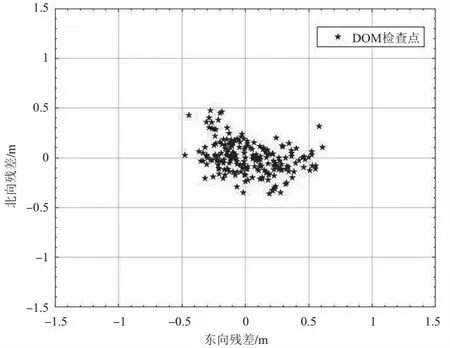
图7 正射影像成果误差分布
相比于以往采用362个控制点、成图面积为582 km2的传统框幅式DMC项目,本项目在成图面积增加27倍的情况下,控制点个数减少了37.85%。
4 结束语
开展高分辨率航空摄影是确保城市规划管理、应急指挥、资源调查和环境监测等业务工作有序进行不可或缺的重要基础数据,具有很强的时效性。使用ADS-100推扫式航摄仪在特大型城市中开展大面积航飞作业能有效地减少外业控制点的布设工作,提升工作效率。同时推扫式航摄仪较传统框幅式航摄仪,具有成图面积大、作业效率快、数据质量高的特点,能够减少内业影像拼接工作,解决像主点落水问题,在北京市等空域限制性较强的地区具有很好的应用前景。该项目的实施对今后开展大面积快速成图工作积累了成熟的作业经验。
猜你喜欢
写真地理(2020年39期)2020-12-23
理论与创新(2020年15期)2020-10-09
河南城建学院学报(2020年3期)2020-08-14
辽宁省博物馆馆刊(2020年0期)2020-08-13
企业科技与发展(2018年5期)2018-09-10
华东师范大学学报(自然科学版)(2018年3期)2018-05-14
汽车文摘(2016年6期)2016-12-07
遥感信息(2015年3期)2015-12-13
电测与仪表(2015年22期)2015-04-09
电测与仪表(2015年3期)2015-04-09
