V2V三维宽带信道建模与统计特性分析
2023-05-05 03:00张治中邓炳光胡玲玲
重庆邮电大学学报(自然科学版) 2023年2期
何 港,张治中,邓炳光,胡玲玲
(重庆邮电大学 通信与信息工程学院,重庆 400065)
0 引 言
车对车(vehicle-to-vehicle,V2V)通信技术作为无线智能交通系统[1]和第五代移动通信技术[2]的重要组成部分,可不借助基站而实现车辆间通信,能够有效提高车辆行驶安全与效率,因而受到广泛的关注。多输入多输出(multiple-input and multiple output,MIMO)技术具有提高频谱利用率以及系统信道容量的巨大优势,因而在V2V通信系统中广受青睐[3]。MIMO信道的时间和空间相关特性对信号传输和通信系统性能有显著影响[4-5]。因此,建立准确的V2V信道模型并研究相关统计特性至关重要。
现有V2V信道模型可分为几何确定模型[6]、几何随机模型[7-8]和非几何随机模型[9]三类。其中,几何随机模型兼顾了几何确定模型的高精确性和非几何随机模型的低复杂性,因而被广泛用于V2V信道建模研究中。文献[10]提出了一个单环几何随机模型,用于各向同性的瑞利信道,并研究了空-时相关特性。文献[11]引入冯·米赛斯分布描述各向异性环境,利用双环模型表征收发端周围的动态散射体,但忽略道路周围静止的树木、路灯和建筑等散射体对信道特性的影响,并且只考虑了二次散射(double bounced,DB)分量。文献[12]假设收发端局部散射体分布在不规则的双环上,提出一种改进的双环模型,称为双玫瑰环模型。文献[13]在双环模型的基础上添加用于表征路边静止散射体的椭圆模型,并同时考虑了视距(line of sight,LoS)分量,一次散射(single bounced,SB)分量和DB分量。
单环、双环和椭圆模型均为二维模型,其假设电波仅在水平面上传播,忽略了垂直平面上的信号变化,这仅在收发端充分分离的情况下才有效。文献[14-16]的研究和测量表明,二维模型会高估无线通信信道的空间相关性,低估通信系统的吞吐性能,因此,利用二维信道来评估V2V通信系统是不准确的。
文献[17]结合二维双环模型和三维(3D)半椭球体模型,其假设收发车周围的动态车辆分布在双环模型上,路边的静止散射体分布在半椭球体上。但假设收发端同移动的车辆处于同一平面并不十分准确,因为收发车周围的动态车辆可能具有不同的高度。文献[18]提出一个结合双球和椭球体的几何随机模型,利用双球模型表征收发端周围的道路交通动态散射体,但没有考虑V2V信道的非平稳特性,而V2V信道由于收发端的快速移动和信号传播环境的快速变化,因此是非平稳的[19]。
上述研究工作大都聚焦于窄带信道,其不同的射线具有相似的延迟。真实的V2V通信环境中,从发送车(transmit vehicle,TV)到达接收车(receive vehicle,RV)的无线电波可能经过不同的散射体和不同的传播链路,因此,需要建立宽带模型以研究不同传播延迟下的信道统计特性。此外,前述的所有V2V信道建模,均假设V2V通信信道的一个重要参数,即莱斯因子在收发车的运动过程中是不变的,然而由于车载通信信道的非平稳特性,该假设是不成立的[20-22]。
针对上述问题,提出一种改进的3D MIMO宽带几何随机模型。利用双球和多共焦半椭球体分别表征V2V通信环境中的动静有效散射体。引入半椭球体模型研究不同传播延迟对信道特性的影响。结合时变的路径长度和莱斯因子表征V2V信道的非平稳特性。利用冯·米塞斯分布[23]描述散射体的分布情况,使模型能够同时模拟各向同向和各向异性环境。根据模型中信号出发角和到达角的确切几何关系,导出并研究了城市和高速场景下时间自相关函数(temporal auto-correction function,ACF)、空间互相关函数(spatial cross-correlation function, CCF)和多普勒功率谱密度(Doppler power spectral density, DPSD)的区别。分析了车流密度、天线角度对信道相关统计特性的影响。通过与实测数据的对比,验证了模型的正确性。
1 信道模型
1.1 模型结构描述
当收发端分别位于椭圆模型的两焦点时,椭圆内所表征的散射区域内每一射线都具有相似的传播延迟,半椭球体是椭圆在三维平面的扩展,这使其成为了构建三维频率选择性信道的物理基础[23]。基于此,提出一种改进的三维宽带MIMO几何随机模型,使用抽头延迟线结构对V2V信道进行建模。
图1和图2分别展示了所提双球-多共焦半椭球体几何随机模型第一抽头和第二抽头的几何结构。为了给出清晰的线条关系和角度,图1a中仅给出了经过双球模型的射线;图1b中给出了经过第一个半椭球体模型的射线。双球模型用于表征V2V通信环境中的道路交通动态散射体,半椭球体模型用于表征路边环境静止散射体。每个半椭球体模型对应于TDL结构中的一个抽头(tap),第l个半椭球体的底面半长轴记为al,其范围内的传播延迟记为τl。其值可记为τl=τ0+lτ,l=0,1,2,…,L-1。其中,τ0为LoS分量的传播时延,τ是经过相邻2个半椭球体的电波的时延差。第(l+1)个半椭球体在水平面的投影椭圆半长轴长度可表示为al+1=al+cτ/2,其中,c=3×108m/s。文献[24]指出,宽带信道的延迟分辨率近似为带宽的倒数。在本文中考虑一个带宽为50 MHz的宽带信道,因此,延迟分辨率为20 ns,即τ=20 ns。由2al+1-2al=cτ得,经过第l+1个半椭球体的电波的链路长度至少比经过第l个半椭球体的电波的链路长度长6 m。基于此,所提模型可以分析不同传播时延下的信道统计特性。

图1 所提模型第一抽头的几何结构Fig.1 Geometry of the first tap of the proposed model

图2 所提模型第二抽头的几何结构Fig.2 Geometry of the second tap of the proposed model
图1中,模型第一抽头包含LoS分量、一次散射分量和二次散射分量。其中,一次散射分量是经过一个双球体和第一个半椭球体的电波,分别用SB1,1,SB1,2,SB1,3表示。二次散射分量是同时经过双球体的电波,用DB表示。图2中,模型第l(l>1)个抽头包含经过第l个半椭球体的一次散射分量SBl,3和分别经过一个双球和第l个半椭球的二次散射分量DBl,1和DBl,2。
考虑一个3D宽带MIMO V2V通信系统,假设TV和RV分别配置MT和MR全向天线(为示图清晰,图1和图2以MT=MR=2为例)。双球模型分别围绕TV和RV,假设有N1,1个散射体分布在围绕TV的球体表面,第n1,1(n1,1=1,2,…,N1,1)个表示为Sn1,1,有N1,2个散射体分布在围绕RV的球体表面上,第n1,2(n1,2=1,2,…N1,2)个表示为Sn1,2。类似地,对于模型中的第l(l>1)个半椭球体,假设有Nl,3个散射体分布其上,第nl,3(nl,3=1,2,…,Nl,3)个表示为Snl,3。模型中各参数及其物理意义如表1所示。
1.2 系统激击响应
TV和RV之间的MIMO衰落信道可以由矩阵H(t)=[hpq(t,τ)]MT×MR完全表示。其中,TV端发射天线Tp和RV端接收天线Tq间的复冲激响应hpq(t,τ)可表示为
(1)
(1)式中:l和L分别表示抽头编号和抽头总数。hl,pq(t)则表示第l个抽头的复时变系数。值得注意的是,hl,pq(t)与传播延迟无关,它其实表示的是一个窄带过程。

表1 模型参数及其意义
1.2.1 第一抽头
基于所提几何模型,链路Tp→Tq在第一抽头的复时变系数是LoS分量、SB1,i(i=1,2,3)分量和DB分量的叠加。
(2)

(3)
(4)

(5)
(3)—(5)式中:K(t)为时变的莱斯因子;λ为载波波长;路径长度εpq,n1,1n1,2(t)=εpn1,1(t)+εn1,1n1,2(t)+εn1,2q(t),εpq,n1,i(t)=εpn1,i(t)+εn1,iq(t);ηSB1,i和ηDB分别是各散射分量占第一抽头散射功率中的比重,其总和为1。
1.2.2 其他抽头
Tp和Tq在第l(l>1)个抽头的复时变系数为
(6)
(7)
(8)
(9)
(7)—(9)式中:ηSBl,3,ηDBl,1/2表示各分量占第l个抽头总散射功率的比重,其总和为1。εpq,nl,1nl,3(t)=εpnl,1(t)+εnl,1nl,3(t)+εnl,3q(t),εpq,nl,3(t)=εpnl3(t)+εnl,3q(t),εpq,nl,3nl,2(t)=εpnl,3(t)+εnl,3nl,2(t)+εnl,2q(t)。
1.3 非平稳时变参数
1.3.1 时变的路径长度和信号角度
对于TV天线阵列的第p天线元素,其到天线阵列中心的距离可表示为kp=(0.5MT+0.5-p)。对于RV天线阵列的第q根天线元素,其到天线阵列中心的距离可表示为kq=(0.5MR+0.5-q)。
假设TV和RV的初始距离为D0,在t时刻的距离为D(t),根据余弦定理,可得
D(t)=D0+VRtcosγR-VTtcosγT
(10)

由两点间距离公式可得
(11)
(12)

kpδTcosφTcosθT)2+(kqδRcosφRsinθR-
kpδTcosφTsinθT)2+(kqδRsinφR-
kpδTsinφT+RR-RT)2
(13)
(14)
kpδTsinφT+RR-RT)2
(15)

(D(t)+kqδRcosφRcosθR-
(16)
(17)

(18)
(19)
εpq(t)≈D(t)-kpδTcosφTcosθT-kqδRcosφRcosθR
(20)
(21)
(22)
(23)
(24)
(26)
(27)
在所提几何模型中,各一次散射分量的出发方位角(azimuth angle of departure, AAoD)、出发仰角(elevation angle of departure, EAoD)、到达方位角(azimuth angle of arrival, AAoA)、到达仰角(azimuth angle of arrival, EAoA)间存在确切的几何关系,可表示为
(29)
假设移动散射体同收发车具有相同的速度。因此,对于LoS,SB1,i和DB分量,其方位角和仰角均可视为是固定的。
对于SBl,3(l≥1)分量,时变的角度可表示
(30)
(31)

(32)
(33)

(34)
(35)
(36)
1.3.2 时变的莱斯因子
莱斯因子作为无线电传播模型中的重要参数,其描述了视距分量和散射分量的线性比值,被广泛用于描述无线信道的特性。在之前长期的V2V信道建模过程中,均假定其在车辆运动过程中为定值。文献[20-22]表明,莱斯因子在不同场景中表现出不同变化,但均可建模成与距离相关的线性函数。
对于城市场景即高VTD场景,表示为[21]
K(t)[dB]=4.269-0.0345D(t)
(37)
对于高速场景即低VTD场景,可表示为[23]
K(t)[dB]=39.832-0.288D(t)
(38)
2 模型统计特性
2.1 空-时相关函数
任意2个时变复脉冲响应hpq(t,τ)和hp′q′(t,τ)之间的空-时相关特性完全取决于每个抽头的hl,pq(t)和hl,p′q′(t)。因此,不同抽头的空-时相关特性相互独立,归一化ST-CF可表示为[22]
ρhl,pq,hl,p′q′(t,δT,δR,Δt)=
(39)
(39)式中:E[·]意为取期望;(·)*意为进行复共轭数学运算。
LoS分量以及各一次散射分量和二次散射分量均是独立的复高斯随机过程。因此,根据(2)式可得第一抽头的ST-CF。
(40)
根据(6)式可得第l(l>1)抽头的ST-CF。
(41)
将(3)式代入(39)式,可得LoS分量的ST-CF。
(42)
(42)式中:
将(4)式代入(39)式,可得SB1,i(i=1,2,3)分量的ST-CF。
(43)
(43)式中:
将(5)式代入(39)式,可得DB分量的ST-CF。
(44)
(44)式中:
将(7)式代入(39)式,可得SBl,3分量的ST-CF。
(45)
(45)式中:
将(8)式代入(39)式,可得DBl,1分量的ST-CF。
(46)
(46)式中:
将(9)式代入(39)式,可得DBl,2分量的ST-CF。
(47)
(47)式中:
2.2 空间互相关函数
在(39)式中,通过设置Δt=0即可得2个时变负脉冲响应hpq(t,τ)和hp′q′(t,τ)之间的归一化空间CCF,其表达式
(48)
因此,通过将(42)—(47)式中的Δt置零,即可得各分量的空间CCF。
2.3 时间自相关函数
在(39)式中,通过设置δT=δR=0即可得信道的时间ACF,其表达式为
(49)
同理,通过在(42)—(47)式中置δT=δR=0,即可得各分量的时间ACF。
2.4 多普勒功率谱密度
信道模型相应的DPSD是时间ACF的傅里叶变化,其表达式为[25]

(50)
3 数值结果与分析
3.1 参数设置
V2V通信经常在较短的距离内发生,因此,收发车大概率处于一个相似的场景中,典型的V2V通信场景包括城市、郊区、高速公路,其主要区别在于各场景中车流密度、道路间距、各散射分量功率的不同。
城市场景,即高VTD场景。莱斯因子K普遍较低,散射分量占主要成分。收发车周围移动车辆更加密集,散射环境趋于各向同性,电波经过2次弹射到达RV的概率大于只经过一次弹射,所以二次散射分量的功率应该高于一次散射分量,这表明,ηDB>max{ηSB1,1,ηSB1,2,ηSB1,3}&min{ηDBl,1,ηDBl,2}>ηSBl,3。
高速场景,即低VTD场景。莱斯因子K普遍较高,LoS分量占主要成分。收发车周围几乎没有移动的车辆,散射环境趋于各向异性。电波经过一次弹射到达RV的概率大于二次弹射,这表明,min{ηSB1,1,ηSB1,2,ηSB1,3}>ηDB&ηSBl,3>max{ηDBl,1,ηDBl,2}。
为符合真实场景,根据文献[26]的实际测量结果并结合现实情况,设置仿真所用参数。如无特殊说明,下文仿真均采用以下参数。
3.2 结果与分析
图3和图4给出了城市和高速场景下,不同抽头即不同传播延迟下的归一化时间ACF绝对值。

图3 不同场景下第一抽头的归一化时间ACF绝对值Fig.3 Normalized absolute temporal ACF of Tap1 in different scenario

图4 不同场景下第二抽头的归一化时间ACF绝对值Fig.4 Normalized absolute temporal ACF of Tap2 in different scenario
综合图3和图4来看,在不同传播延迟下,时间ACF均有相同的下降趋势,即随着时间间隔Δt的增大而逐渐减小,最终趋于平缓。另外,无论VTD的高低,第一抽头和第二抽头的时间ACF呈现显著差异,并且第二抽头的时间ACF显著低于第一抽头,这表明时间ACF随着多径传播延迟的增加而减小。这是因为随着传播路径的增加视距成分几乎不可见,并且信号功率也会随着传播路径的增加而衰减。同时,图3和图4对比了不同时刻的时间ACF,其中,t=0 s和t=1 s分别表示为平稳和非平稳状态。可以看出,所提模型在时域上表现出明显的非平稳性,即时间特性曲线随着时间t的变化而变化,这是收发端和散射体的移动,传播环境和信道参数发生变化而造成的。无论是第一抽头还是第二抽头,城市场景的时间ACF始终低于高速场景,在相同的时间间隔内,城市场景的ACF比高速场景下降得更快。其物理原因为城市场景的VTD较高,收发端周围存在大量散射体和多样的散射子路径,散射分量贡献主要功率,通信环境更加复杂,传播环境的变化比低VTD环境更快。因此,高VTD环境有更低的时间ACF。
图5展示了城市场景下TV和RV的运动方向对时间ACF的影响。可以看出,车辆运动方向也会对信道相关统计特性造成一定影响。具体而言,当TV和RV相互靠近时,ACF最高;当TV和RV反向运动时,ACF最低;当TV和RV同向运动的时,ACF处于两者之间。这是因为相向运动时收发端距离快速减小,时变莱斯因子数值增大,LoS分量的功率增大,导致时间相关性增加;与此相反,当收发端反向运动时,收发端距离快速增大、时变的莱斯因子数值减小、LoS分量占总功率的比重下降、散射分量的占比增加。
图6和图7分别描述了城市高速场景第一/第二抽头的空间CCF。由图6—7可见,空间CCF在不同传播延迟下均有相同的下降趋势,较大的传播延迟会导致更小的空间相关性。同时,低VTD场景拥有更高的空间相关性,并且空间CCF在时域上亦表现出明显的非平稳性。结合图3—7可以看到,不同传播延迟下的时间相关特性和空间相关特性均有明显区别,信道的时空相关特性与多径传播延迟呈现明显的负相关,更大的传播延迟会导致更小的时间和空间相关特性。
图8以k1,1和SB1,1分量为例研究了散射体分布对空间相关特性的影响。实值参数k1,1控制着散射体Sn1,1方位角和仰角的分布情况,当k1,1→0时,散射体在传播空间的分布更均匀;散射环境趋于各向同向环境。当k1,1→∞时,散射环境趋于各向异性。从图8可以看到,随着k1,1逐渐增大时,空间相关特性曲线随之上移,并且波动更小。其原因在于随着k值的增大,散射体大概率分布在同一区域,不同天线的接收信号都经过该同一个散射区域,这导致了MIMO天线阵元间的空间相关性增加。

图7 不同场景下第二抽头的归一化空间CCF绝对值Fig.7 Normalized absolute space CCF of Tap2 in different scenario


图8 k1,1对SB1,1分量空间CCF的影响Fig.8 Influence exerted by k1,1 on the space CCF of SB1,1 components
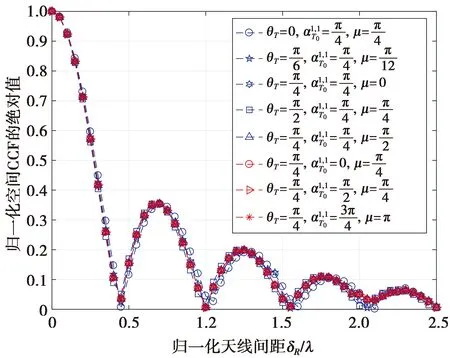
图9 θT在各向同性散射环境下对空间CCF的影响Fig.9 Influence exerted by θT on the space CCF in isotropic scattering environment
图11设置k1,1=0和k1,2=0探究了天线阵列仰角φT和φR在各向同性散射环境下是如何影响信道空间相关特性的。通过仔细观察图11可以发现,在天线间距约为0.5倍波长时,信道的空间CCF受天线阵列仰角而变化的趋势发生了改变。具体而言,当天线间距小于0.5倍波长时,空间CCF随着天线阵列仰角的增大而减小;然而,当天线间距大于0.5倍波长时,空间CCF随着天线阵列仰角的增大而增大。
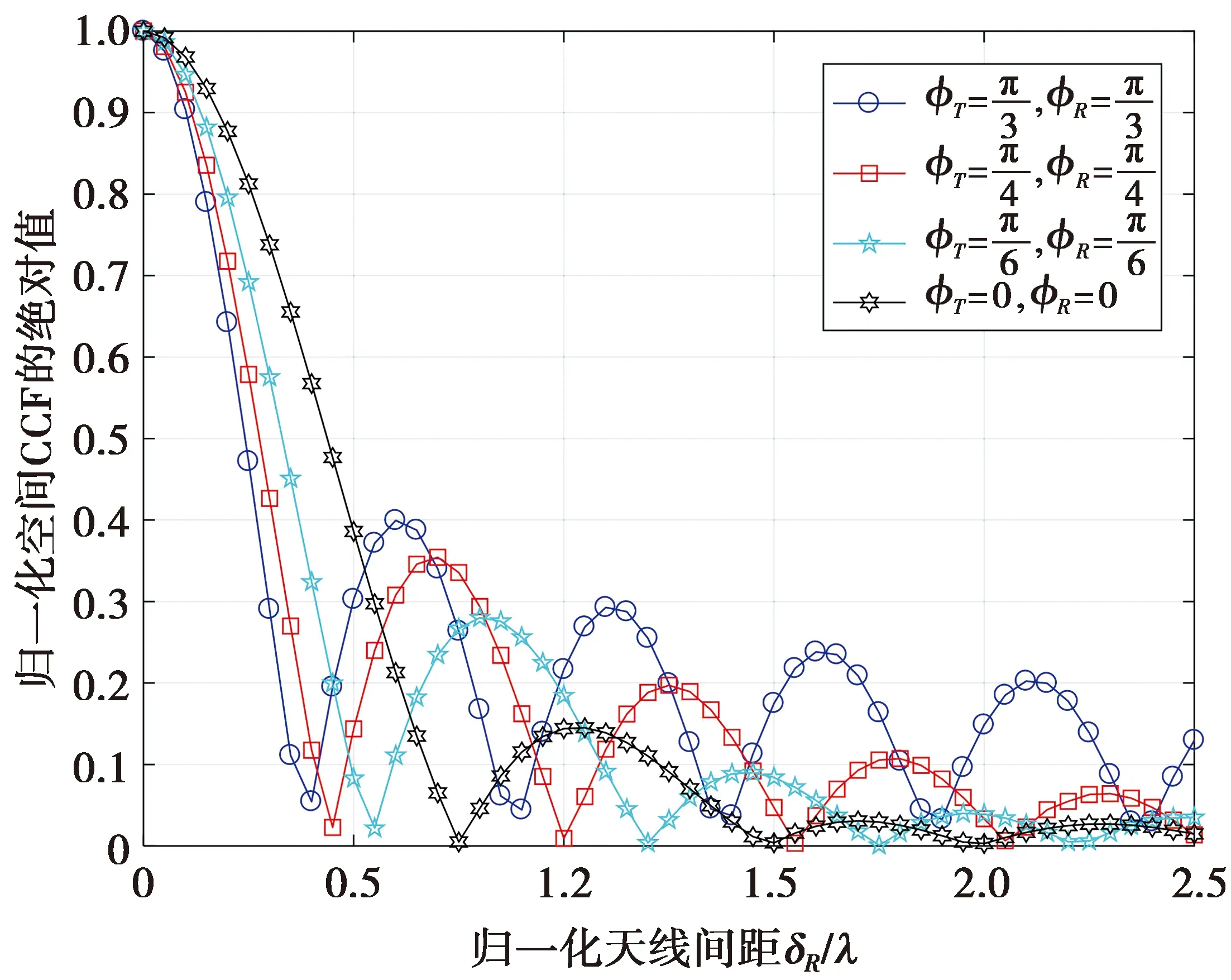
图11 φT,φR在各向同性散射环境下对空间CCF的影响Fig.11 Influence exerted by φT,φR on the space CCF in isotropic scattering environment
图12设置k1,1=10和k1,2=0探究了天线阵列仰角φT和φR在各向异性散射环境下对信道空间相关特性的影响。从图12可以看出,在各向异性散射环境下,信道的空间CCF随着天线阵列仰角的增大而增大。由于V2V通信中,车辆用于安装通信天线的空间小,因此,V2V天线阵列应该尽可能地小巧与紧凑,以便安置更多的天线元素。天线阵列的小型化必然导致天线间距的缩小,进而增加信道间的空间相关性,大部分MIMO系统为了解决此问题往往考虑增加天线仰角以获得更大的使用空间,但因此也带来了更大的空间相关性。因此,综合本节探讨的结论,在V2V通信系统设计中,需要权衡增加天线仰角而带来的使用空间增量和信道空间相关性增量间的利弊。

图12 φT,φR在各向异性散射环境下对空间CCF的影响Fig.12 Influence exerted by φT,φR on the space CCF in anisotropic scattering environment

图13 所提模型DPSD与实测数据对比Fig.13 DPSD compared between proposed model and measured data
从图13可以观察到,城市场景下的DPSD曲线的裙摆更大,更加平坦;高速场景下DPSP曲线更加陡峭,更加集中。其物理原因为在城市场景下,VTD较高,散射体较多,散射环境丰富,接收功率往往来自于各个方向的动态车辆,因此,相应的DPSD更加均匀且平坦。同时,仿真结果与实测数据较好地吻合,证明所提模型能准确表征V2V无线信道的相关特性。此外,仿真结果曲线未能与实测数据完全重合,这是因为模型中考虑的是有效散射体而不是全部散射体。但是在模型参数尽可能匹配实测场景时,仿真结果与实测数据之间有较高的吻合。
4 结束语
本文针对5G MIMO V2V通信系统,提出一个改进的3D宽带几何随机模型。利用双球模型和多共焦半椭球体模型分别表征动静散射体。经过不同半椭球体模型的射线具有不同的延迟,因此可研究不同传播延迟下的V2V信道统计特性。结合时变的路径长度和莱斯因子表征V2V信道的非平稳特性。通过调整模型参数,能适用于多种不同的V2V通信场景,兼顾准确性,灵活性。深入研究和分析了导出的信道统计特性,数值结果表明,信道的时空相关特性同传播延迟呈负相关关系,传输延迟越大,时间和空间相关性越小。城市场景的空间相关性和时间相关性均低于高速场景,并且随着时间的变化呈现不同的波动。信道空间特性受天线方位角和仰角的影响显著。此外,通过比较所提模型与实测的多普勒功率谱密度,验证了模型的正确性。
猜你喜欢
导航定位学报(2022年2期)2022-04-11
电讯技术(2022年1期)2022-02-12
智能制造(2021年4期)2021-11-04
无损检测(2019年11期)2019-11-20
制造技术与机床(2017年9期)2017-11-27
石油地球物理勘探(2017年2期)2017-11-23
北京航空航天大学学报(2017年3期)2017-11-23
城市勘测(2016年2期)2016-08-16
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
华东理工大学学报(自然科学版)(2015年4期)2015-12-01