
电流过零比较与动态时滞的无线电能传输频率跟踪方法
2023-05-08 03:55徐笑娟陈兆权冯德仁
安徽工业大学学报(自然科学版) 2023年2期
罗 进 ,徐笑娟 ,陈兆权 ,冯德仁 ,沈 浩
(安徽工业大学 电力电子与运动控制安徽普通高校重点实验室, 安徽 马鞍山 243032)
无线电能传输(wireless power transfer,WPT)技术是借助磁场[1]、电场[2]、激光[3]、微波[4]等载体实现电能从电源端到用电设备端的无电气连接传输,具有安全、可靠、灵活、便捷等优势[5]。近年,磁耦合谐振式无线电能传输(magnetically coupled resonant wireless power transfer,MCR-WPT)技术已成为国内外最受关注的研究课题之一,研究成果已成功用于电动汽车、水下供电、生物医疗、机器人等领域[6-9]。
在MCR-WPT 系统中,当传输距离、负载参数变化时,系统处于失谐状态,导致传输效率降低[10-12]。因此,准确检测系统谐振频率和调节开关频率是解决失谐问题的一个重要环节。目前,常用锁相环自动锁频技术实现频率跟踪,确保一次侧电压和电流同相[13]。但锁相环技术需使用相关模拟芯片,增加了电路设计的复杂性,同时降低电路抗噪声能力和可靠性[14-15]。采用现场可编程逻辑门阵列(field programmable gate array,FPGA)能实现全数字化的频率跟踪控制,提高系统可靠性[16],但系统频率变化范围有限,传输效率也有待提高。赵禹等[17]采用单片机设计了一种基于接收电压最大原理的频率自动跟踪方法,但在大功率场合应用时具有一定局限性。进一步地,完全谐振的串串(series series,SS)补偿拓扑对耦合系数比较敏感,耦合系数过小时,系统易出现过电流问题,存在安全隐患,且二次侧不能工作在开路状态[18-19]。胡宏晟等[20]设计了一次侧失谐的串串补偿拓扑,能够提高一次线圈和二次线圈的有效耦合区域,也不存在轻载安全隐患,但未考虑负载的变化特性。然而,相关研究[21-22]表明:开关频率大于一次侧谐振频率且等于二次侧谐振频率时,系统工作在准谐振状态,即不存在频率分裂现象,同时开关管工作在零电压开关(zero voltage switch,ZVS)状态。综上,针对MCR-WPT 系统频率失谐问题,设计一种基于数字信号处理(digital signal processing, DSP)技术的电流过零比较与动态时滞的数字锁相环和系统阻抗角调节的控制方法,实现电压电流频率和相位跟踪,结合输出电压和电流的双闭环控制,达到恒流或恒压输出。
1 MCR-WPT 系统的理论分析
1.1 MCR-WPT 系统等效模型
设计的MCR-WPT 系统主要用于补给自动导引运输车(automated guided vehicle,AGV)等智能机器人。为简化系统结构、降低成本,采用串串补偿网络的无线电能传输系统,如图1。系统由全桥逆变器、一次侧串联补偿网络、松耦合变压器、二次侧串联补偿网络和全桥同步整流器组成。无线电能传输过程:高频逆变器将直流电压Ui转换为高频交流电压UAB,作为一次侧串联补偿电容C1和松耦合变压器一次侧线圈L1的激励;L1将高频电能转换为高频磁能,通过二次侧线圈L2与二次侧串联补偿电容C2组成的磁耦合谐振系统转化为高频电能;再经全桥同步整流器将能量转移给负载RL。

图1 串串补偿的无线电能传输系统Fig.1 SS compensated WPT system
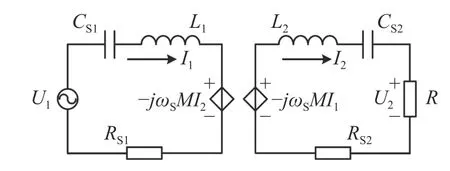
图2 WPT 系统等效电路Fig.2 Equivalent circuit of WPT system


1.2 MCR-WPT 系统频率跟踪控制原理
当一次侧逆变器采用频率跟踪和移相控制时,输出电压与电流波形如图3。

图3 逆变器驱动与输出波形Fig.3 Drive and output waveform of inverter
其中:G1,G2,G3,G4分别为图1 逆变器4 个开关管T1,T2,T3,T4的驱动信号;td为同一桥臂开关管的死区时间;φ1为基波电压U1与谐振腔内电流I1'的相位差;φ2为UAB的上升沿与电流的正向过零点之间的相位差;φp为移相控制输出的移相角。则有
根据分析:当工作于图3 的状态一时,逆变器开关频率ωS与一次侧谐振频率ω1相等,逆变器输出的基波电压与电流同相位,系统无功功率最小。但此时4 个开关管T1,T2,T3,T4均工作在硬开通状态,系统开关损耗、开关管电压应力较大、电磁干扰严重,且存在频率分裂现象,影响系统的稳定性。当工作于图3 的状态二时,逆变器开关频率ωS大于一次侧谐振频率ω1,逆变器输出的基波电压超前电流相位φ1,即系统工作在弱感性状态,有φ2>0,便于系统工作在软开关状态。以下分析均基于状态二进行。
由式(5)可得

综上,为实现ZVS 工作状态,一次侧逆变器应工作在弱感性状态,即逆变器开关频率大于一次侧谐振频率(ωS>ω1),故仅考虑开关频率ωn>1 的情况。如图4,在φ2>0 的区域内,当负载电阻较大时,耦合系数k越小,开关频率越接近谐振频率;当负载电阻较小时,开关频率偏移谐振频率较大。由计算结果知:当φ2>0 时,保持k,RL恒定,即可确定系统开关频率的工作范围。根据全桥等效电路,可进一步求得
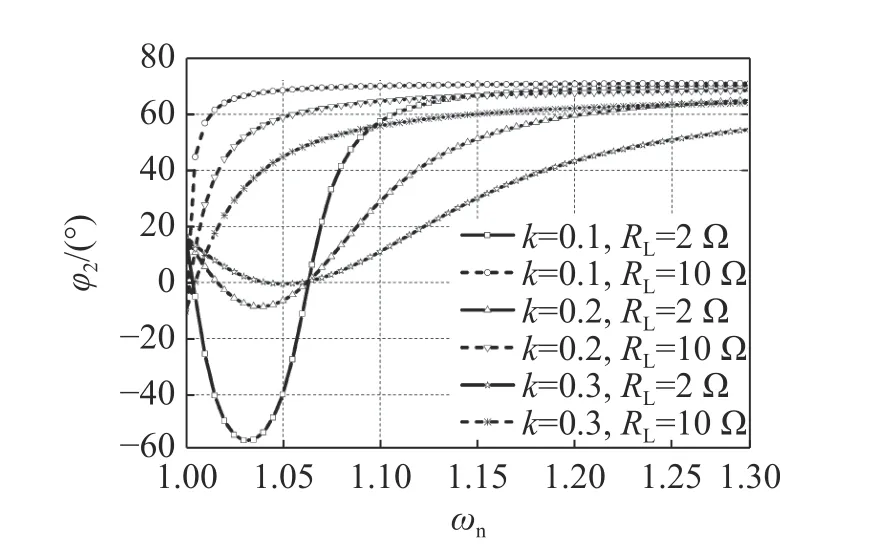
图4 D=0.8 时φ2 与k,RL 的关系Fig.4 Relationship between φ2 and k, RL when D=0.8
结合式(2),(3),(5),(9)的推导可知:SS 谐振补偿式WPT 系统的跨导增益为通过负载电阻RL的电流Io与输入直流电压Ui的比值,即

根据式(10)和表1 的参数可知:当k=0.2 时,跨导增益Giu与占空比D、开关频率ωn、负载电阻RL的关系如图5。保持占空比D=0.8、负载电阻RL=10 Ω,当耦合系数变化时,跨导增益Giu与开关频率ωn的关系如图6。由计算结果可知:当输入电压不变时,且开关频率ωn>1,输出电流随占空比D的增大而增大,随开关频率ωn的增大而减小,随负载RL的增大而减小。当耦合系数越大时,Giu随ωn的变化较小。

表1 MCR-WPT 系统电路仿真参数Tab.1 Simulation parameters of WPT system
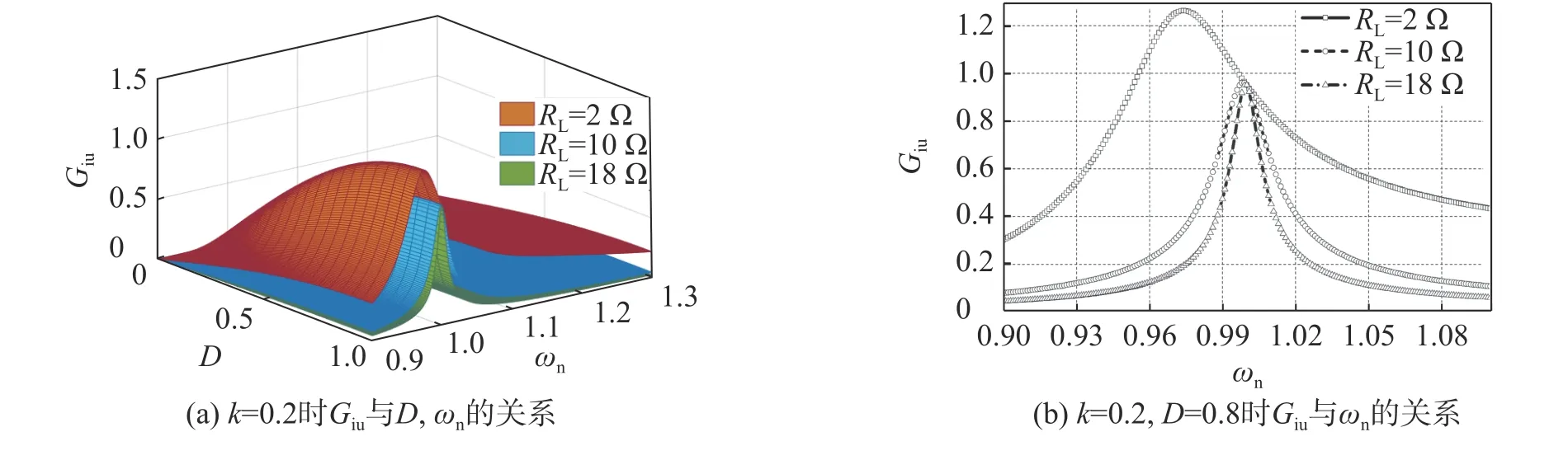
图5 跨导增益与占空比、开关频率及负载的关系Fig.5 Relationship between transconductance gain and duty cycle, switching frequency, load

图6 跨导增益与开关频率之间的关系Fig.6 Relationship between transconductance gain and switching frequency
综上,MCR-WPT 系统的电压增益为负载RL两端的电压Uo与输入电压有效值Ui的比值,即
根据式(11)和表1 的参数可知k=0.2 时,电压增益Guu与占空比D、开关频率ωn、负载电阻RL的关系,结果如图7。由图7 可知:当输入电压不变时,且开关频率ωn>1,输出电压随占空比D的增大而增大,随开关频率ωn的增大而减小,随负载RL的增大而增大。

图7 电压增益与占空比、开关频率以及负载的关系Fig.7 Relationship between voltage gain and duty cycle, switching frequency, load
综上可知:在负载电阻RL较小的情况下,当系统二次侧谐振频率大于一次侧谐振频率(ω2>ω1)时,增益的最大点向ωn<1 偏移。因此,在仅考虑ωn>1的区域内(k=0.2),通过文中设计的参数可得出:在恒流充电过程中,随电池等效电阻的增大,需减小开关频率以确保电流增益不变,此时输出电压增益越来越大,满足恒流充电时电池电压增大的特性;在恒压充电过程中,随电池等效电阻的增大,需增大开关频率以确保电压增益不变,此时输出电流增益越来越小,满足恒压充电时电池充电电流逐渐减小的特性。观察发现:在电流增益或电压增益一定的情况下,耦合系数越大,工作频率越高。因此,根据充电电压与充电电流的大小,通过选择合适的输入电压,系统的工作频率能在较大范围内变化。
2 MCR-WPT 系统的频率跟踪方法
为保证一次侧逆变器的工作频率始终跟随谐振频率,系统需对一次侧线圈电流进行跟踪,使线圈电流与逆变器输出电压同相位,还需满足充电系统恒压或恒流输出。因此,控制系统需采样一次侧线圈电流、输出电压和电流,具体的系统框图如图8。一次侧控制系统包括DSP 控制器、驱动电路、电流采样电路和无线通信电路;二次侧控制系统包括单片机控制器、输出电压、电流采样电路和无线通信电路。一次侧与二次侧通过无线通信方式进行数据交换。

图8 MCR-WPT 系统框图Fig.8 Block diagram of MCR-WPT system
2.1 频率跟踪控制
文中提出的电流过零比较数字锁相环可实现对一次侧线圈电流频率的快速跟踪,能够控制逆变器工作在谐振状态,结合动态时滞方法控制逆变器工作在可设定相位差的失谐状态。根据图9 逆变器的输出电压和电流波形可知

图9 逆变器输出的电压和电流波形Fig.9 Voltage and current waveform of inverter output
式中:T为逆变器的半个周期时间;tp为移相时间;t1为移相全桥控制器超前臂上管驱动信号输出时间。图9 中Δt为超前臂上管驱动信号与电流过零点的时间差。当电流过零点超前驱动信号,且Δt=t1时,逆变器输出电压电流同相位处于谐振状态。因此,通过控制Δt能够使系统工作在谐振状态或失谐状态,能够调节系统阻抗。为使开关管工作在ZVS 状态,还应满足电流过零点滞后驱动信号。图10 为MCR-WPT 控制系统框图。
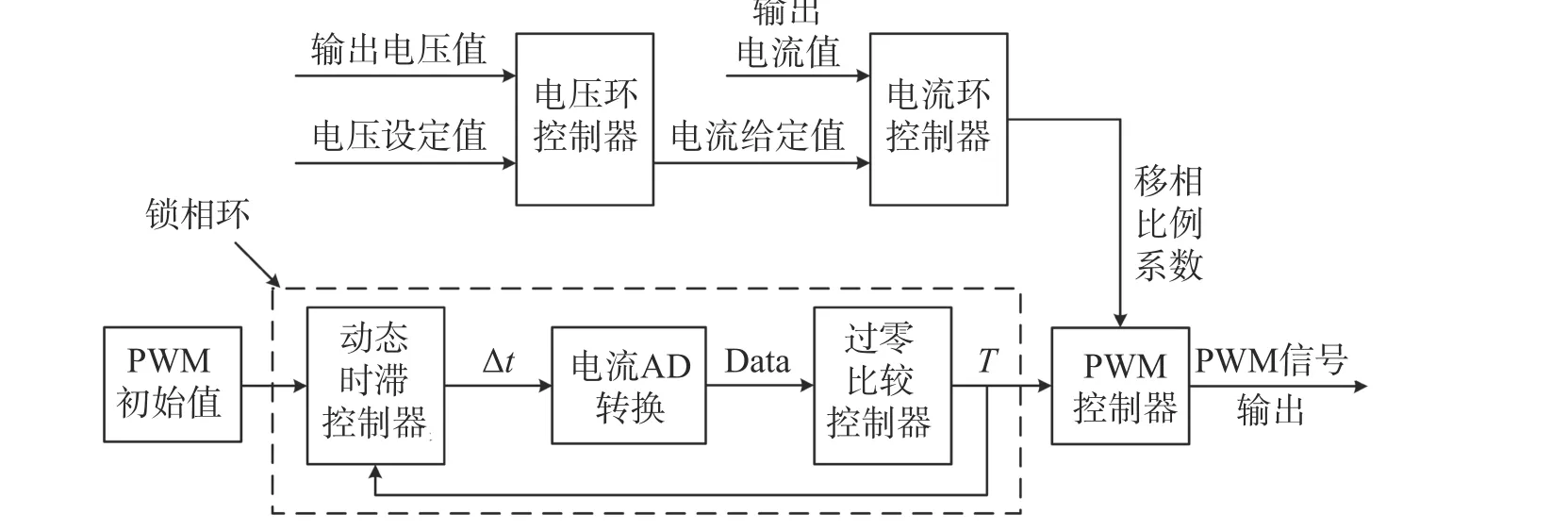
图10 MCR-WPT 系统的控制框图Fig.10 Control block diagram of MCR-WPT system
MCR-WPT 控制系统由电压环控制器、电流环控制器、数字锁相环和脉冲宽度调制(pulse width modulation, PWM)控制器组成。数字锁相环由虚线框内的流程实现,具体过程:动态时滞控制器根据PWM初始周期值计算得到线圈电流的转换时间Δt,启动模数(analog-to-digital, AD)转换,将AD 转换的电流值Data 送入过零比较控制器,调节PWM 信号的周期T;再将T反馈至动态时滞控制器参与计算,控制电流值在零点附近波动,实现频率与相位的跟踪控制。当系统传输特性变化时,系统谐振频率发生偏移,在当前时滞和周期下,电流将偏离零点位置。具体过程:系统谐振频率增大时,过零点位置电流大于0;系统谐振频率减小时,过零点位置电流小于0。因此,当前采样的电流值通过过零比较控制器进行相应的PWM 周期值调节。过零比较控制器工作过程:当Data 值大于0 时,输出T减小一个定值,即系统工作频率增大;当Data 值小于0 时,输出T增加一个定值,即系统工作频率减小。动态时滞控制器工作过程:确定PWM 周期后,超前臂上管的驱动时间即为T/2,则根据设定的滞后角度θ 可计算出AD 转换启动时间t,即启动时间与超前臂上管驱动时间差为Δt,表达式为:
2.2 频率跟踪实现
综上分析,使用TI 公司TMS320F28035 型号的DSP 芯片作为一次侧控制器,实现频率跟踪控制与恒压或恒流输出控制,控制方法软件流程如图11。
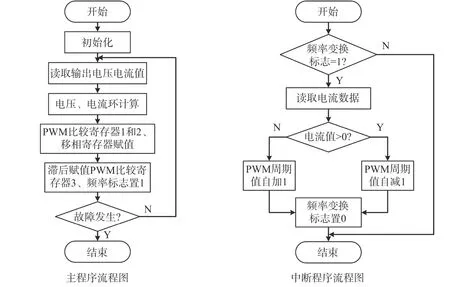
图11 控制方法流程图Fig.11 Flowchart of the control method
具体实施过程如下:
1) DSP 控制器初始化设定的AD 模块启动时间由DSP 的PWM 比较器3 决定,完成PWM 模块、AD 模块、中断模块等配置。
2) 通过无线通信方式得到二次侧输出电压和电流数据,设定每帧数据传输时间为0.5 ms。
3) 根据给定电压和电流值完成电压外环与电流内环的双闭环计算,结果作为移相角的比例系数。
4) 将周期值的1/2 赋值PWM 比较寄存器1 和2,产生PWM 驱动信号;将移相角的比例系数与周期值相乘的结果赋值移相寄存器,并置位频率调节允许标志,即PWM 中断发生时允许频率调节。
5) 根据PWM 比较寄存器1 和3 确定驱动信号1 和3 的输出时间;根据式(13)计算时间t,赋值PWM比较寄存器3,确定AD 转换的开启时间。
中断程序主要完成周期值调节,即频率调节。当PWM 中断产生后,若允许频率调节,则读取电流值且将其与电流零点值进行比较,根据比较结果对周期进行相应变化,最后将频率调节允许标志清零。
3 实验验证
为验证一次侧线圈电流过零比较和动态时滞的无线电能传输频率跟踪控制方法的可行性,设计一套基于DSP 技术的MCR-WPT 系统实验平台,如图12。实验平台包括48 V 直流供电电源、一次侧控制器、松耦合变压器、二次侧控制器、负载电阻和示波器等。能量从直流电源到负载电阻单向传递,通过2.4 GHz 无线通信模块将二次侧输出电压和电流数据发送至一次侧控制器。其中,一次侧控制器由全桥逆变器、DSP 控制电路和补偿电容组成。全桥逆变器开关管采用FDP045N10A 型号,驱动芯片采用IR2110 型号,无线通信芯片采用NRF24L01 型号,2 个线圈外径均为12 cm,一次侧和二次侧线圈自感均为23 µH,一次侧和二次侧补偿电容分别为1.4,1.0 µF,气隙距离3,5 cm 时耦合系数分别为0.3,0.1。

图12 MCR-WPT 系统实验平台Fig.12 MCR-WPT experimental system
调整Δt使逆变器输出电压和电流同相位,且处于谐振状态。系统输出电流10.1 A、电压25.45 V,气隙距离2,3 cm 时,逆变器输出电压UAB与发射线圈电流I1的波形如图13。由图13 可看出:UAB的基波电压U1与电流I1同相位,开关管工作在硬开关状态,且开通时存在电压尖峰,使开关管存在较大的电压应力,电磁干扰较大。气隙距离2 cm 时,逆变器工作频率为36.34 kHz;气隙距离3 cm 时,逆变器工作频率为30.56 kHz。

图13 谐振状态下,改变气隙距离得到的电压和电流波形Fig.13 Waveforms of voltage and current obtained by changing air gap distance in resonant state
调整Δt使电流过零点滞后驱动信号,逆变器输出电流滞后输出电压,呈弱感性。在系统的输出电流10.1 A、电压25.45 V,气隙距离2,3 cm 时,逆变器输出电压UAB与发射线圈电流I1的波形如图14。由图14可看出:UAB的基波电压U1超前电流I1,开关管工作在ZVS 状态,且开通时无电压尖峰,电磁干扰小。气隙距离为2 cm 时,逆变器工作频率为43.98 kHz;气隙距离为3 cm 时,逆变器工作频率为34.94 kHz。

图14 弱感性状态下,改变气隙距离得到的电压和电流波形Fig.14 Waveforms of voltage and current obtained by changing air gap distance in weak inductance state
采用恒流输出方式时,输出电流10 A,在如下2 种状态下对MCR-WPT 系统的传输效率进行实验对比:系统定频工作时,f=30 kHz,且工作频率不随间隙距离变化而变化;采用频率相位跟踪控制方法使逆变器工作频率跟随系统谐振频率变化,逆变器输出电流滞后输出电压,呈弱感性状态。传输效率定义为二次侧输出功率与一次侧输入功率之比。在发射线圈与接收线圈处于平行、同轴状态下,改变两线圈之间的气隙距离,得到固定频率与频率跟踪控制方法的传输效率,结果如图15。由图15 可看出:当气隙距离较大时,频率跟踪控制方法得到的系统传输效率优于定频工作状态。

图15 2 种工作状态下传输效率与气隙距离的关系Fig.15 Relationship between transmission efficiency and air gap distance in two working states
上述实验结果表明:采用电流过零比较和动态时滞的MCR-WPT 频率跟踪控制方法可实现频率的动态跟踪与相位调节;当调整Δt使电流过零点滞后驱动信号,逆变器工作在弱感性状态时,开关管工作在ZVS 状态,降低了开关管的开关损耗,减小了开关管的电压应力,且降低了系统的电磁干扰,提高系统可靠性。与固定频率工作状态进行对比,所提频率跟踪与相位调节的控制方法能够有效提高系统的传输效率。
4 结 论
在分析MCR-WPT 系统拓扑结构、耦合电路模型和频率跟踪控制原理的基础上,提出一种基于DSP 技术的电流过零比较与动态时滞的数字锁相环和系统阻抗角调节的控制方法,实现电压电流频率和相位跟踪;结合电压外环、电流内环的双闭环控制满足电池恒压或恒流充电方式,通过实验验证控制方法的可行性和有效性。结果表明:气隙距离发生变化时,提出的控制方法能够自动跟踪系统谐振频率,且工作在弱感性状态,为开关管的ZVS 状态提供了条件;在相同工作条件下,频率跟踪控制方法的传输效率优于定频方法,同时逆变器工作在弱感性状态,不存在感性、阻性和容性3 种状态的切换,确保系统工作的稳定性。
猜你喜欢
大电机技术(2022年4期)2022-08-30
中国特种设备安全(2021年5期)2021-11-06
北京航空航天大学学报(2021年6期)2021-07-20
电子制作(2019年19期)2019-11-23
模具制造(2019年7期)2019-09-25
电子制作(2018年19期)2018-11-14
西南交通大学学报(2016年3期)2016-06-15
通信电源技术(2016年4期)2016-04-04
汽车维护与修理(2015年6期)2015-02-28
城市轨道交通研究(2015年3期)2015-02-27
