
压缩空气弹射系统实验与仿真
2023-07-03 01:16张新敬李笑宇徐玉杰陈海生
储能科学与技术 2023年6期
刘 夏,张新敬,李笑宇,徐玉杰,徐 谦,陈海生
(1江苏大学流体机械工程技术研究中心,江苏 镇江 212013;2中国科学院工程热物理研究所,北京 100190;3中国科学院大学,北京 100049;4中科院工程热物理研究所南京未来能源系统研究院,江苏 南京 211135;5中国科学院轻型动力创新研究院,北京 100190;6江苏大学能源研究院,江苏 镇江 212013)
无人机压缩空气弹射技术是利用压缩空气的内能转化为活塞的动能,进一步带动无人机运动,它能在短时间内实现无人机的加速,达到无人机的飞行速度。无人机应用范围广泛,涵盖多个领域,但其起飞阶段能量消耗占比较高,缩短了无人机续航时间以及降低了无人机的有效载荷[1-2],因此亟需合适的助力发射方式。目前无人机常用的起飞方式包括火箭助推、滑跃起飞、垂直起飞、弹射起飞、手抛发射及空中投放等[3-4]。压缩空气弹射技术相较于其他弹射方式,如弹力弹射、液压弹射、蒸汽弹射及电磁弹射等[5-6],具有能量密度高、结构简单、机动性强、红外暴露小、成本低廉以及重复性好等优点[7]。相较于无人机自力起飞,压缩空气弹射可以有效地避免高温排焰,延长发射设备的寿命;减少对场地的约束,提高无人机停放数量,增强无人机群战斗力[8];并且可以降低无人机起飞过程的能量消耗,提升其有效载荷且增加巡航里程。
由于压缩空气弹射作用时间很短,在较高气源压力下,瞬时流量大[9],弹射器的参数选择及整体设计是一大难点。因此,基于实验与仿真方法,把握弹射过程中的弹射体运动状况以及腔室、气路中的气体流动规律显得尤为重要。
目前国外在压缩空气弹射器研发方面比较领先的有美国、英国、芬兰以及西班牙等少数发达国家。如美国的Mark4弹射器,应用于美国“扫描鹰”和“综合者”无人机系统。英国梅吉特防务系统公司的“大力士”气动弹射器,采用低压充气系统,可以实现以55 m/s 的速度发射250 kg 无人机的目标。芬兰罗伯尼克公司研制的“孔蒂奥”弹射器,可以发射重量50~500 kg 全系列飞行器,包括战术无人机及发射靶机等;其开发的MC系列弹射器可支持以37 m/s的速度完成500 kg无人机的弹射起飞作业。此外,西班牙Aries公司研制的HERCULES AH-01型号弹射器,可以实现最大弹射质量500 kg,最大速度65 m/s的弹射任务[5,10]。
国内学者主要围绕压缩空气弹射内弹道特性研究、弹射器结构设计以及弹射系统控制等方面展开相关理论及实验研究。尤其在内弹道特性研究方面,主要针对筒式发射,基于不同的研究方法并且面向不同发射对象,进行了大量弹射器影响参数研究。方九如[11]和丛龙腾[12]都以超近程防御武器系统压缩空气发射为背景,利用流固耦合仿真方法对不同空气压力、泄流面积以及内弹道长度等参数条件下的内弹道特性展开研究。李军等[13]利用有限元分析软件建立了大口径火箭弹压缩空气发射装置的仿真模型,从能量角度出发进行参数分析,并考虑了泄漏带来的能量损耗。谢磊等[14]利用Fluent软件建立了直筒式压缩空气弹射装置1/4 网格模型,在先前研究基础上考虑了初始温度对弹射装置内弹道特性的影响。李博平等[15]建立直筒式压缩空气弹射装置内弹道数学模型,在MATLAB中实现了发射阀全开时间以及阀最大流通面积等参数的仿真计算。刘南宏等[7]开展筒式压缩空气弹射系统仿真与实验研究,通过初始参数设计搭建原理实验台并完成不同质量下的弹射实验,验证了其仿真模型的准确性,为压缩空气弹射器样机的研制提供有效理论参考。范奥博[16]以一种巡飞无人机的压缩空气单兵弹射为研究背景,基于流固耦合仿真软件分析了泄流因素对单兵筒式武器内弹道特性的影响以及弹射击发时的活塞碰撞应力情况,并在此基础上试制样机展开试验,最终实现4.5 kg巡飞无人机以52 m/s左右的速度发射。此外,Ren等[17]针对高压气动弹射器工作时面临的气压、温度急剧变化情况,建立了基于Peng-Robinson方程的真实气体理论模型,该模型考虑了动态泄漏及气体与金属壁之间强制对流传热的影响并得到了试验验证,为研究高精度高压气动弹射器提供了方法。徐张宝[18]针对高压气动弹射过程中存在的强非线性以及模型不稳定等控制问题,结合理论与实验方法深入研究并提出了一种子系统控制策略。相较于大量的筒式发射研究,李德庚等[19]、张钊[20]、黄国勤等[21]、李士军等[22]、罗江雪等[23]则针对无人机发射,基于仿真分析方法开展了导轨气压弹射装置研究。其中,李德庚等[19]基于数学仿真方法进行了主要影响参数分析,并关注了发射倾角对无人机加速过程的影响。张钊[20]进行了无人机弹射系统设计以及批量化弹射方案的研究。黄国勤等[21]、李士军等[22]则主要针对一种楔形轨道弹射装置进行系统结构上的仿真优化设计。罗江雪等[23]基于Ansys Workbench进行了弹射架风振研究。
国外在压缩空气弹射领域已具备相对成熟的产品加工技术,并已应用于军事领域。而国内的大多研究仍处在筒式发射的理论研究或关键部件实验阶段,相较于筒式发射,导轨弹射增设了增速滑轮组、牵引装置、缓冲装置以及导轨等部件,在实现牵引无人机平稳加速和滑车制动以及完成样机组装及运输等方面,增加了理论设计以及实验实施难度,迄今也未形成具有一定市场规模的导轨式无人机用压缩空气弹射器产品[24]。因此,基于上述研究,本工作开展了无人机用压缩空气弹射器样机的研制以及实验与仿真研究,成功研制适用于中小型固定翼无人机的压缩空气弹射器样机并开展了性能测试,进一步建立仿真模型进行动态分析,结合实验结果,详细分析弹射器瞬态工作过程的气动作用原理,揭示了压缩空气弹射器气动作用机理。
1 压缩空气弹射系统
1.1 系统工作原理
无人机压缩空气弹射系统如图1所示。在弹射准备阶段,无人机及滑车被固定在初始位置,压缩机向高压储气罐充气,达到目标压力时停止充气。弹射开始时,闭锁机构释放滑车及无人机。通过气阀控制,压缩气体瞬间从储气罐充入动力气缸推动活塞做功并通过增速滑轮组带动滑车及无人机加速,加速后期无人机达到失速速度离开小车实现起飞,滑车则在缓冲装置作用下实现减速制动。

图1 无人机压缩空气弹射系统Fig.1 UAV compressed air ejection system
1.2 热力学模型
由于在压缩空气弹射实际作用过程中,真实气体的流动情况较为复杂,为简化模型,本研究中均采用理想气体模型,且不考虑泄漏。
在储气装置充放气过程中,根据质量守恒定律和能量守恒定律可得[25]:
式中,ṁin、ṁout为储气室(储气罐、储气缸)充放气时的空气流量。储气罐释气过程中ṁin= 0。m为储气室内的气体质量,t为时间,u为空气比内能,h为空气比焓,T为储气室内空气温度,Tenv为环境温度,kc为储气室内空气与环境的换热系数,A为储气室的换热表面积。
储气罐气体流向气缸过程中,空气流经气阀,该过程为一维等熵流动,并由质量流量计算方程可将其进一步分为亚声速流动和超声速流动[26-28]:
式中,β为流量修正系数,S为阀流通截面积,Ph为储气罐气体压强,ρh为储气罐气体密度,κ为空气绝热指数,πr为进出口压比。
无人机及气缸活塞运动情况的运动学公式如下:
其中不考虑无人机所受发动机推力及所受空气阻力,获得的无人机受力分析:
式中,m1为无人机质量,m2为滑车质量,l1为无人机运动位移,t为无人机运动时间,F为无人机及滑车所受牵引力,fs为滑车及无人机所受摩擦阻力,G为无人机及滑车所受总重力,θ为发射倾角。
活塞受力分析:
式中,m3为活塞质量,l2为活塞运动位移,A'为活塞截面积,Δp为活塞两侧压差,f's为活塞与气缸壁间的摩擦阻力,G'为活塞所受重力,FZ为活塞所受负载。
二者之间的联系:
式中,n为传动比。
2 实验与仿真研究
2.1 压缩空气弹射器设计
针对50 kg 固定翼无人机用压缩空气弹射器,通过建立热力学模型,并在MATLAB中进行设计参数仿真计算。其计算结果表明:在一定参数范围内,储气罐体积、初始压强、弹射筒直径及轨道长度与弹射速度呈正相关,并且在上述参数中仅轨道长度与弹射过载呈负相关,弹射角度对弹射器性能影响较小。此外,因为本实验的设计目标在于实现20 m/s以上的弹射速度,即该值不小于弹射无人机的失速速度,在该衡量标准下进行弹射器参数选取,因此综合考量,最终得到的参数选取结果见表1。

表1 50 kg无人机压缩空气弹射器参数选取结果Table 1 Parameter selection results of compressed air catapult for 50 kg UAV
设计的无人机用压缩空气弹射器样机如图2所示,该弹射器包含的实验部件主要有高压储气罐、气缸、增速滑轮装置、弹射导轨、缓冲机构等。其他实验设备及零部件还包括压力传感器、速度传感器以及数据采集系统等。
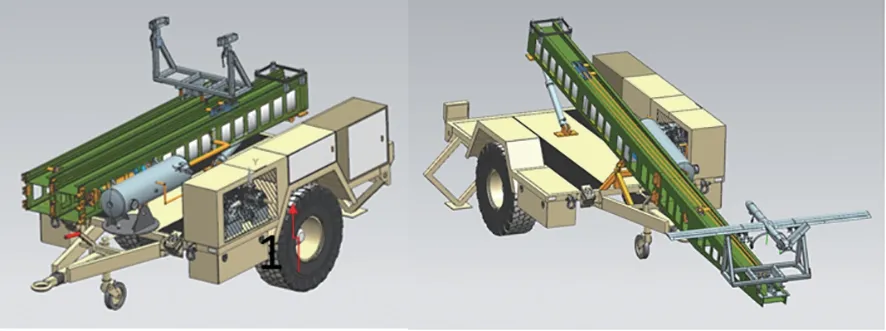
图2 无人机压缩空气弹射器结构示意图Fig.2 Structure diagram of UAV compressed air catapult
2.2 实验测试及数据采集方案
本实验测试主要分为三个阶段,即弹射准备阶段、弹射起飞阶段以及弹射完成阶段,如图3所示。在弹射准备阶段,展开弹射架并调整到适当弹射倾角,无人机位于弹射起始位置。弹射起飞阶段,开启电磁阀,同时释放无人机滑车,实现无人机加速飞行。无人机离开弹射轨道即弹射完成。

图3 无人机压缩空气弹射过程示意图Fig.3 UAV compressed air ejection process diagram
实验记录的数据主要包括压力及无人机运动过程参数等。压力测量选用美国通用电气UNIK5000型压力传感器(图4)。运动参数的获取主要通过加速度传感器实现。实验直接测得的数据为加速度,而速度和位移分别通过对加速度计算间接求得。

图4 UNIK5000型压力传感器Fig.4 UNIK5000 pressure sensor
2.3 仿真模型搭建
对无人机弹射系统进行仿真分析,在流固耦合仿真软件中建立包括储气罐、连接管、气缸以及活塞等部件对应的仿真模型,模拟气路作用过程。流体域均建立为欧拉域,在该软件系统中欧拉域默认边界为刚性边界,在气缸模型最右端进行出口边界设置,活塞所在固体域则建立为拉格朗日域。最终通过传动比折算由活塞的运动情况间接得到无人机的运动参数。此外,由于管路为轴对称结构,为简化分析,在仿真软件中搭建网格模型进行计算,该模型运行的总节点数为115110,如图5所示。

图5 无人机压缩空气弹射2D仿真模型示意图Fig.5 Schematic diagram of 2D simulation model of UAV compressed air ejection
3 实验与仿真结果分析
3.1 压力变化分析
图6~10显示了仿真与实验结果。如图6所示,可以看出当阀门开启后,储气罐内的高压空气在短时间内释放,使得储气罐内的压力变化近似线性下降,至弹射终了,储气罐内的剩余气体压强仍占初始压强的68.3%。并且仿真与实验结果吻合较好,该仿真方法能够应用于弹射器的气动作用过程分析。

图6 储气罐压力变化曲线对比Fig.6 Comparison of pressure change curves of gas storage tanks
3.2 无人机运动参数分析
图7所示为无人机的加速度变化曲线,弹射开始时加速度值骤增并迅速上升到峰值,随后逐渐下降,实验与仿真条件下的加速度曲线变化趋势较为一致。加速度的变化主要由活塞两侧的压差决定,弹射初始时刻,由于阀门开启,储气罐内的高压空气在短时间内涌入储气缸,使得活塞左侧的压力迅速增加,活塞两侧的压差迅速增加到最大值。随着活塞的进一步运动,储气缸容积增加,活塞左侧压力下降,活塞两侧压差减小,从而使得加速度减小。仿真与实验结果相比,加速度的响应时间提前,这是由于仿真相较于实验更趋向于理想过程,在弹射开启瞬间即刻响应;而在实验过程中由于电磁阀完全开启需要一定的时间,因此造成了初期加速度变化上的滞后。并且在弹射后期,实验加速度的变化还出现了一定的波动,考虑这是由于在实验过程中部件间振动等因素导致。

图7 无人机加速度变化曲线对比Fig.7 Comparison of UAV acceleration curve
图8所示为无人机的速度变化曲线,无人机的弹射速度随着时间的增加不断增大,同时速度增幅减小。仿真结果与实验结果二者吻合较好。在弹射初期,由于响应时间的影响,与加速度变化曲线相对应,同时刻下的仿真速度较实验速度增长较快。仿真条件下的弹射末速度为24.74 m/s,实验值为25.11 m/s,误差约为1.5%,在容许误差范围内。

图8 无人机速度变化曲线对比Fig.8 Comparison of UAV velocity curve
图9所示为无人机位移随时间的变化曲线,仿真与实验的变化趋势一致,位移与时间呈近二次函数关系,前期位移增长速度较缓,后期不断增加。

图9 无人机位移变化曲线对比Fig.9 Comparison of UAV displacement curve
此外,结合图10所示的位移速度曲线分析,弹射速度随位移变化不断增大,且加速过程主要集中在弹射行程的前期,后期速度增长变缓,这仍是受活塞两侧的压力变化影响,因为随着活塞位移的不断增加,储气容积不断扩展,活塞左侧压力进一步下降,从而造成相同位移变化下的速度增长逐渐放缓。
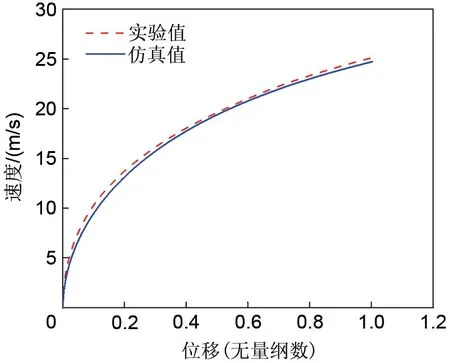
图10 无人机速度-位移变化曲线对比Fig.10 Comparison of UAV velocity-displacement curve
3.3 压缩空气流动过程分析
3.3.1 设计参数分析
对于无人机压缩空气弹射系统而言,影响无人机运动特性的主要因素来自于活塞两侧的气体压力变化,而活塞右侧为常压区,因此为了更好地把握无人机的运动规律,只需对储气缸内的气体变化情况进行分析。图11 展示了不同时刻储气缸内的气体压力云图以及速度矢量分布情况。

图11 储气缸各时刻气体压力云图及速度矢量分布Fig.11 Gas pressure cloud diagram and velocity vector distribution at each time of cylinder
由图11 可知,储气缸内的气体压力在弹射初期达到最大,随后逐渐降低。并且几乎在整个弹射阶段,气缸内的高压区分布都在局部与整体之间往复变化。这是由于在不同弹射阶段,活塞左端面处的气体运动不同程度受阻集聚,从而形成局部的高压区,并在压差的驱动下不断改变分布区域。而在355 ms之后,气缸内的压力变化逐渐趋于稳定,直至388 ms 弹射结束,气缸内的压力分布再无明显变化,如图11(c)所示。
弹射初期5~10 ms 内,来自储气罐的高压空气尚未到达活塞壁面,具有较大的来流速度,并且越靠近轴心处的气体流速越大,易产生较大的速度波动,如图11(a)所示。随着弹射时间的不断推移,到达活塞左侧的流体在活塞端面减速升压,并进一步驱动活塞运动,同时流体在活塞端面由中心向四周扩展,进而沿着气缸壁面回流,到弹射中后期,在整个空间内形成涡流,流体速度分布也逐渐均匀,如图11(b)、(c)所示。
3.3.2 参数敏感性分析
为了进一步分析储气缸初始压力对无人机运动的影响情况,搭建三组仿真模型,设定储气罐初始压力无量纲数为1.25,储气缸初始压力无量纲数分别为1.25、0.9以及0.55,以位移为横坐标,分析不同初始缸压下的储气缸压力变化以及无人机运动情况。
如图12 所示,储气缸压力变化整体呈先上升后下降的趋势,随着初始值降低,压力变化曲线逐渐变缓。

图12 不同初始缸压下储气缸压力变化曲线Fig.12 Cylinder pressure change curve under different initial cylinder pressure
图13 所示为三组参数下的无人机速度及加速度变化曲线。不同初值条件下完成弹射所需的时间依次为340 ms、388 ms 和489 ms,气缸充气压力不同,其弹射时间不同。此外,从图中可以看出,加速度变化曲线与储气缸压力变化曲线基本一致,加速度峰值随初始缸压的增加而增大,同时更高压力下的加速度衰减也更快,变化更为剧烈。速度与初始缸压呈正相关,但随着缸压的进一步提升,同时刻下速度的增幅将会减小。如缸压从0.55 提升到0.9,末时刻速度提升了20.5%;但从0.9提升到1.25,末时刻速度只提升了12.2%。因此在具体实验过程中,需要综合考虑发射条件,即无人机发射目标、无人机所能承受的最大过载、气缸承压以及预充气压的经济性,进行合理的初始缸压设定。

图13 不同初始缸压下运动变化曲线Fig.13 Motion curves under different initial cylinder pressures
由于储气缸压力变化在前期有明显差异,故截取10 ms时刻的速度矢量分布图进行对比分析,如图14 所示,在弹射初始时刻,当储气罐压力一致时,储气缸压力越小,靠近轴心处的流体速度越大,这是因为在更大的压力梯度下气体的流速增大。因此反过来当初始缸压越大,储气罐气体的流入速度更慢,而活塞两侧又由于压差增大,位移更快,使得储气缸容积扩展更快,两方面因素共同作用使得较高缸压下的气体压力衰减加剧。

图14 10 ms时不同初始缸压下速度矢量分布Fig.14 Velocity vector distribution under different initial cylinder pressures at 10 ms
4 结 论
本工作介绍了压缩空气弹射器的研制、实验以及仿真分析,成功研制基于压缩空气动力的无人机弹射器样机,并开展了详细的实验与仿真分析,解析了弹射器工作过程参数变化以及气动作用过程,同时研究了不同参数对弹射器性能的影响,得出的主要结论如下。
(1)成功研制了无人机压缩空气弹射系统样机,并开展实验研究,实现了50 kg无人机以25.11 m/s的速度弹射。
(2)仿真模型的运行结果与实验值吻合较好,储气罐压力变化基本一致,无人机弹射速度误差控制在1.5%内,验证了仿真模型的准确性。
(3)研究获得了压缩空气弹射器工作过程的压力、速度、加速度等参数的变化规律,进一步分析把握了气缸内部压缩空气对活塞的作用过程,揭示了弹射过程中压缩空气的作用机理。
(4)在一定范围内,储气缸压力与无人机速度、加速度变化呈正相关。储气缸压力设定过高,对气缸及无人机的结构强度要求增加,加速度峰值过高且衰减较快,不利于弹射过程的平稳运行;设定过低,弹射时间延长,弹射速度减小。因此需要综合考虑,设定合理的储气缸初始压力。
猜你喜欢
设备管理与维修(2019年9期)2019-09-12
上海铁道增刊(2017年3期)2018-01-22
石油化工建设(2017年2期)2017-06-05
兵器知识(2017年2期)2017-02-21
现代工业经济和信息化(2016年5期)2016-05-17
船海工程(2015年4期)2016-01-05
海军航空大学学报(2015年4期)2015-02-27
压缩机技术(2014年3期)2014-02-28
机电信息(2014年32期)2014-02-27
河南科技(2014年10期)2014-02-27
