自动驾驶中基于透明度的人机界面设计研究
2023-07-25 06:48王建民汪巧凤张俊
包装工程 2023年14期
王建民,汪巧凤,张俊
自动驾驶中基于透明度的人机界面设计研究
王建民,汪巧凤,张俊
(同济大学 艺术与传媒学院,上海 201804)
选取自动驾驶中后方来车的典型场景,探究基于透明度人机界面(HMI)设计对驾驶员认知的影响。采取文献查阅、场景分析、实验评估等研究方法,使用态势感知的透明度(SAT)理论模型,设计了该场景下的HMI界面,并在驾驶模拟器上进行了设计验证。研究结果表明HMI透明度水平与驾驶员对系统的信任度呈正相关,但感知工作量无显著变化。另外,不同水平的透明度信息会影响驾驶员的态势感知能力,而驾驶员对当前情境的理解与信任度存在显著相关性。HMI的透明度设计会从三个方面影响驾驶员的认知,分别是态势感知、工作负荷和信任度。因此在对人机界面进行透明度设计时,需要重点考虑对这些因素的影响。
自动驾驶;HMI设计;透明度;信任度;工作负荷
随着自动驾驶技术的发展,搭载高级辅助驾驶系统(Advanced Driving Assistance System,ADAS)的智能汽车已实现产业化应用。这些ADAS可以给人类驾驶员提供认知和控制的合作,如:跟车距离过短警告、侧方来车、压线提醒等,这些功能都提高了人类驾驶员的认知能力,促进了驾驶安全。然而,自动化在交互上也给人带来了三个方面的变化,分别是反馈的变化(Changes in Feedback)、任务和任务结构的变化(Changes in Tasks and Task Structure)、操作员对变化的认知和情绪反应(Operators 'Cognitive and Emotional Response to Changes)[1]。这种变化使人类驾驶员与ADAS技术的交互成为一个新问题,在传统的手动驾驶中,需要驾驶员完成所有的驾驶任务,驾驶员会根据自己对环境的感知做出驾驶决策,而自动驾驶或部分自动驾驶功能开启的状态下(如L2、L3级别),ADAS完成了部分或全部的控制和认知任务,但是这种控制和认知的过程和结果需要人类监督,即驾驶员负责监督其驾驶,并在必要的时候完成接管[2]。换句话说,自动化本身成为人类关注的对象。
这种关注可以通过人机交互(Human Machine Interaction)来实现,而如何设计人与自动化或智能系统的交互成为最重要的问题。Parasuraman等[3]认为,成功的自动化通常是由适当的操作员心理负荷、高度的情境意识(SA)及对行为的不满意和技能退化来衡量的。因此,在对人机交互界面中的信息进行设计时需要考虑很多因素,比如态势感知、工作负荷、信任度等。为了让人类驾驶员更理解机器的认知和行为,HMI界面信息需要将更多更准确的机器认知信息传达给驾驶员,对信息进行适当的透明度设计成为智能系统的界面设计重点,尤其是在自动驾驶车辆中。
目前自动驾驶车辆中如何考虑透明度的界面设计尚需要深入研究。基于以上背景,本文以后方来车为研究场景,对中控屏幕中的信息进行了不同透明度水平的设计,期望这些设计可以有效提升驾驶员对行车环境的感知,并且可以影响人类驾驶员对自动化系统的信任。在本文中,第一部分,回顾了态势感知、透明度、信任度等重要概念,以及国内重要的车厂对自动驾驶车辆界面设计的桌面研究。第二部分,对自动驾驶中的后方来车场景进行了认知需求分析,用来确定驾驶员的信息需求。第三部分,在特斯拉 Model3中控界面的基础上结合透明度(SAT)模型进行了界面设计,最终形成了三种水平的透明度HMI设计方案。这三种方案主要向驾驶员传达了以下部分或全部信息:对当前环境的感知、对当前环境状态进行分析、对可能发生的结果进行预判。第四部分,通过实验对设计方案进行了评估并给出了结论。
1 理论基础
1.1 态势感知与透明度
态势感知或情景意识(situation awareness, SA)是指人对周围环境变化的感知能力,即当前发生了什么,这意味着什么以及该怎么做[4]。根据Endsley[5]的定义,它分为三个等级:SA 1为个体对周围环境中与任务相关的元素进行感知;SA2涉及对SA1等级中数据的解释,这有助于个体对当前任务和目标的理解;SA3涉及对系统或者环境中元素未来状态的预测。态势感知可以由人类持有,也可以由智能系统持有,现代车辆上的ADAS系统就是这样一个具有态势感知能力的智能系统[6]。这种系统正在转变为具有高度自治的自治代理[7](L3-L5级别自动驾驶)。在高级自动驾驶实现之前,目前的自动驾驶功能是一个基于多代理的(人和ADAS)联合驾驶活动,即驾驶任务由人类驾驶员和ADAS共同完成。因此,人和ADAS是以团队(Team)的形式在控制车辆和感知环境。例如,在人机合作驾驶的过程中,驾驶员开启自动驾驶后,具有部分自动驾驶能力的ADAS控制驾驶,驾驶员负责监督同时进行一些非驾驶任务,在这种情况下,人和ADAS之间需要不断交流各自的SA,以便完成安全而高效的合作驾驶。
在交流的过程中,如何传递三个等级的SA信息,从而让双方更准确地了解彼此,透明度(Transparency)被认为是一种解决方案。透明度是指界面能够告知操作员系统的目的、推理未来计划的能力从而增进人对机器的理解和信任[8]。更好的透明度设计应该在驾驶场景中对驾驶员产生积极的影响,因为透明度对解释智能系统的行为和决策有着重要的辅助作用,可以提升操作员对智能系统的信任度及团队绩效。目前,透明度设计已经被用在车辆HMI设计的各个方面,例如Chen等[9]将基于情境感知的代理透明度(SAT)模型分别应用到了Autonomous squad member和Intelligent Multi-UxV planner with adaptive collaborative/control technologies这两个项目的HMI设计中。除此之外,“后方来车”也是自动驾驶状态下人机合作驾驶的典型场景,Pokam等[10]认为该场景下自车有超车计划时容易忽略后方车辆的信息。
Chen和他的同事利用Endsley的SA模型开发了一种基于态势感知的透明度(SAT)模型,该模型将态势感知信息进行分层显示,以促进人类伙伴的理解。SAT模型由三个独立的层次组成,每个层次都代表着与驾驶员互动时需要传达的信息。其中,第一个层次(SAT 1)的信息主要用于帮助驾驶员感知系统当前的行动和计划;第二个层次(SAT 2)的信息用于驾驶员更好地理解系统当前的行为;第三个层次(SAT 3)的信息用于驾驶员对未来结果的预测。当驾驶员开启自动驾驶之后,ADAS时刻监控着周围环境,并将这三个层次的态势感知信息通过HMI界面传递给人类驾驶员,人类驾驶员会通过HMI界面的信息及自身从环境中得到的信息来综合判断是否需要接管车辆,该过程见图1。
基于以上理论基础,本文选取了自动驾驶中的后方来车场景。在该场景中,为了满足人类驾驶员对机器认知情况的理解,研究团队使用上文所提的SAT模型,将智能体对后方来车的态势感知信息转化为不同透明度水平的HMI设计,以研究智能系统透明度界面对人机团队合作的影响。
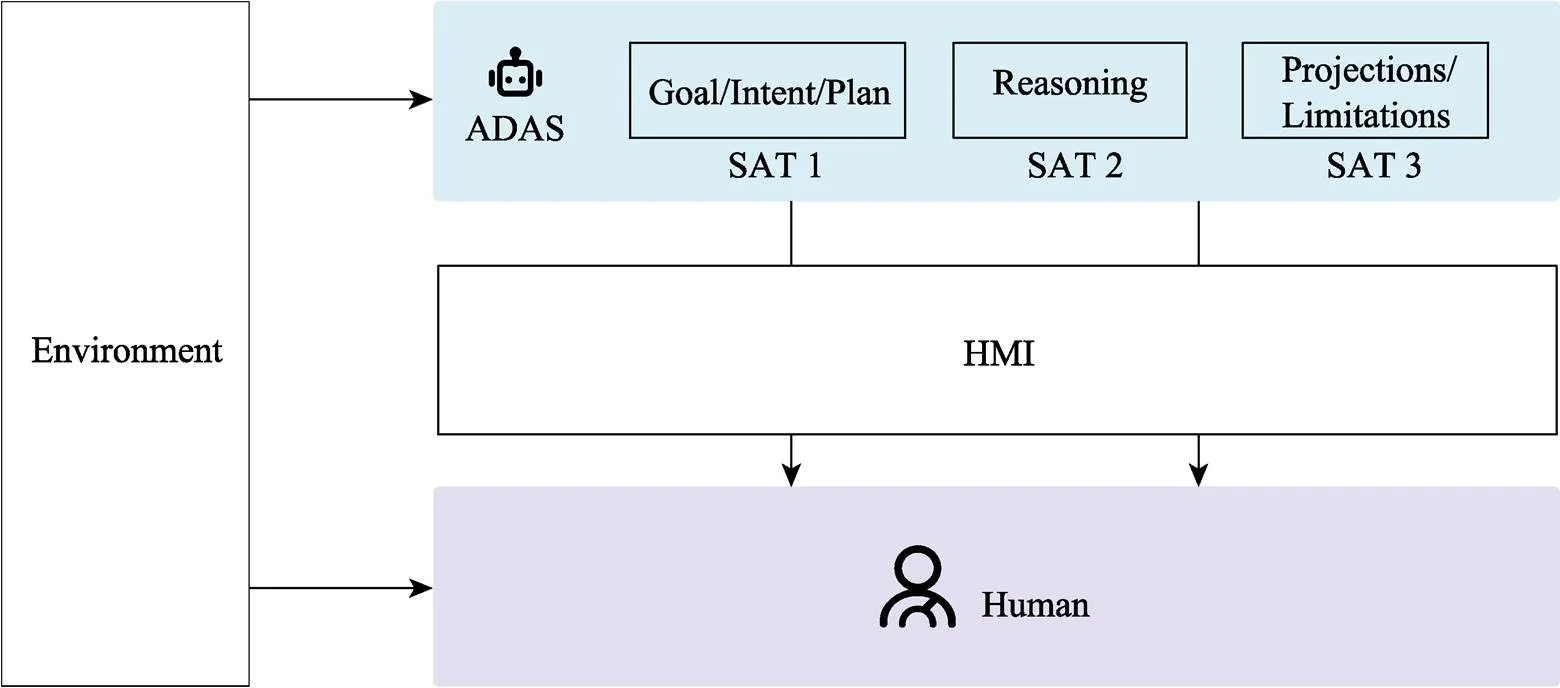
图1 自动驾驶过程中基于态势感知的透明度模型
1.2 信任度
成功的人机合作需要通过信任校准而使驾驶员对自动化系统保持“适中”的信任程度。如果驾驶员对自动化系统没有信任,那么即便自动化性能很好,驾驶员也不会去使用。相反,如果驾驶员对自动化系统有过多的信任,会因为过度依赖自动化系统而不正确地使用。信任度低或过度信任都会导致事故的发生。因此,HMI发挥着潜在作用,它会在实际的驾驶条件中引导驾驶员获得其适当的信任,这对确保驾驶安全和舒适至关重要。
在人机交互领域中,Lee等认为人在与自动化系统合作时除了透明度之外,另一个组成部分是信任。当车辆处于自动驾驶状态时,驾驶员对系统的信任也是人机团队合作成功的重要因素[11]。Chen等[12]的研究表明,人和自动化系统之间有两种类型的信任:倾向型信任和基于历史的信任。倾向型信任是指一个人比较稳定的信任观念,常在人与自动化系统进行交互之前就已经存在,而基于历史的信任是一种不断变化的信任,会受人与自动化系统交互的影响。在合作的过程中,驾驶员会根据自己获取到的信息、印象以及过往的经验而对自动化系统产生不同程度的依赖。
目前,信任度的衡量有两种方式。一种是根据Muir[13]提出的基于车辆自动化信任度的模型,该模型将信任分为三个维度,分别是可预测性、可靠性和忠诚度。可预测性是指驾驶员可以很好地预测系统的输出,可靠性指的是驾驶员可以放心地让自动化系统参与到任务中,并对系统产生依靠性,忠诚度是指在驾驶员使用自动化系统完成任务后,还希望继续使用该系统。另外一种是Jian等[14]开发的信任度量表,该量表包含12个影响人与自动化系统之间信任的潜在因素,见表1。
Chen及其团队的研究已经表明,人对智能体的信任度与界面的透明度有关,界面的透明度水平越高,人对系统的信任度越高。然而对透明度如何影响信任度没有进一步的描述,本文对这部分内容做了补充。
表1 信任度量表
1.3 HMI设计案例调研
近几年来,自动驾驶技术发展迅速,国内外多家主流车企均发布了搭载辅助驾驶功能的量产车,对自动驾驶状态下“后方来车”这一典型场景都有各自的人机界面方案。蔚来ES8、小鹏P7、智己L7均在仪表屏上增加了显示当前车况的信息,在HMI设计上,用醒目的车模表示本车,用灰色的车模显示周围的辆及行人,这在一定程度上有助于驾驶员在不用转头观察左右后视镜的情况下掌控当前车辆行驶状态,但是这种方案仍然存在优化的空间。以后方来车场景为例,首先,车模在视觉效果上并未对超车之前和超车之后做出区分,若后方有车驶来,驾驶员不一定能迅速感知后方的车辆;其次,若本车处在多车道的驾驶环境下,左右两边均有车辆驶来并有并道意图时,自动驾驶系统采取了制动行为,但是驾驶员因无法判断这两辆车的紧急优先程度,就无法理解系统作出此决策的原因;最后,由于仪表盘上还设计了如导航、音乐卡片等其他种类的信息,因此驾驶员在无法预判未知危险的情况下会将注意力放在这些信息上。
为了解决以上问题,HMI方案可以从透明度设计的角度出发,增加信息的视觉层次,从而提高驾驶员感知信息的能力、帮助其理解系统行为并预知未来可能存在的危险。表2总结了四款当前搭载了辅助驾驶系统的量产车,并对其在后方来车场景中的HMI设计方案进行了问题总结及解决方向总结。
表2 自动驾驶车辆HMI调研总结

Tab.2 Summary of HMI research for autonomous vehicles
2 HMI设计
2.1 场景分析
本文中,车辆处于自动驾驶模式,此时后方来车,并突然向自车前方超过。该场景如图3所示,驾驶场景可分为三个阶段,阶段一是后方来车和本车的距离大于10 m(超车前),阶段二是后方来车和本车的距离为0~10 m(超车中),阶段三是后方来车超过本车(超车后),其中①代表正在匀速行驶的本车,②代表后方来车,以大于本车的速度匀速行驶。
实际上,道路上行驶的车辆间往往存在着强烈的相互作用[15]。在日常交通中可以观察到,在超车的第一阶段,驾驶员往往通过左右后视镜来观察后方行车环境,有时候驾驶员还会通过稍微减速或者拉开车辆间的横向距离使后方车辆顺利完成超车,但是在自动驾驶模式下,驾驶员可能会因担心系统无法理解并执行这种行为而接管车辆。如图4所示,描述了整个超车过程中不同阶段的态势感知信息需求及这些态势感知的透明度层次。首先,在后方车辆离本车距离较远时,HMI显示SAT 3级预测信息,警示驾驶员后方或有危险意图的车辆,当引起驾驶员注意后,HMI上显示SAT 1级感知信息,即后方车辆与本车的相对位置;其次,当后方车辆与本车的位置进一步靠近时,HMI在持续显示SAT 1级感知信息的同时,需要告知驾驶员ADAS对当前行车状况是否危险的理解,即SAT 2级信息;最后,当后方车辆成功超车,HMI显示SAT 1级感知,用于告知驾驶员当前车况。

图2 后方来车场景的前、中、后三个阶段

图3 超车过程中基于透明度的交互场景
2.2 界面元素设计
本文的设计基于特斯拉Model 3的中控界面,设计的目标是通过中控界面,驾驶员是否知道后方发生了什么事?特斯拉屏幕范围外的提示信息是否充分?如何提示驾驶员对行车环境的感知?以及提升用户对HMI信息提示的信任度。
根据上文的分析,对SAT等级进行了界面元素的设计。对超车前的SAT 3预测信息,用一个带有黄色渐变的方块来表示,对SAT 1感知类信息,则用小车模型来实时映射实际的车辆状况;对超车过程中的SAT 2理解类信息,采用黄色、红色来显示危险程度;对超车后的感知类信息,使用灰色小车模型来实时映射实际的车辆状况,见图4。
结合SAT模型的三个层次,定义出了三种HMI,每个HMI中的信息都反映了不同SAT水平需要传递的信息,如表3所示,其中HMI 0为Model 3用户界面,用来作为对照,“N”表示没有显示某层次的信息,“Y”则表示显示此层次的信息。
HMI 0没有SAT模型中的任何一级信息,HMI 1仅显示SAT 1相关的信息,用黄色小车后方车辆相对本车的位置,如图5所示;HMI 2显示SAT 1和SAT 2的信息,在原有黄色的基础上,用红色和灰色表示后方车辆与本车之间距离的远近与危险程度,当后方车辆距离本车过近有潜在危险时,用红色示警,如图6所示;HMI 3显示SAT 1、SAT 2和SAT 3的信息,在HMI 2的基础上,用黄色色块显示后方来车的预测信息,见图7。
表3 HMI设计方案

Tab.3 HMI design scheme

图4 基于透明度的信息需求及界面设计元素
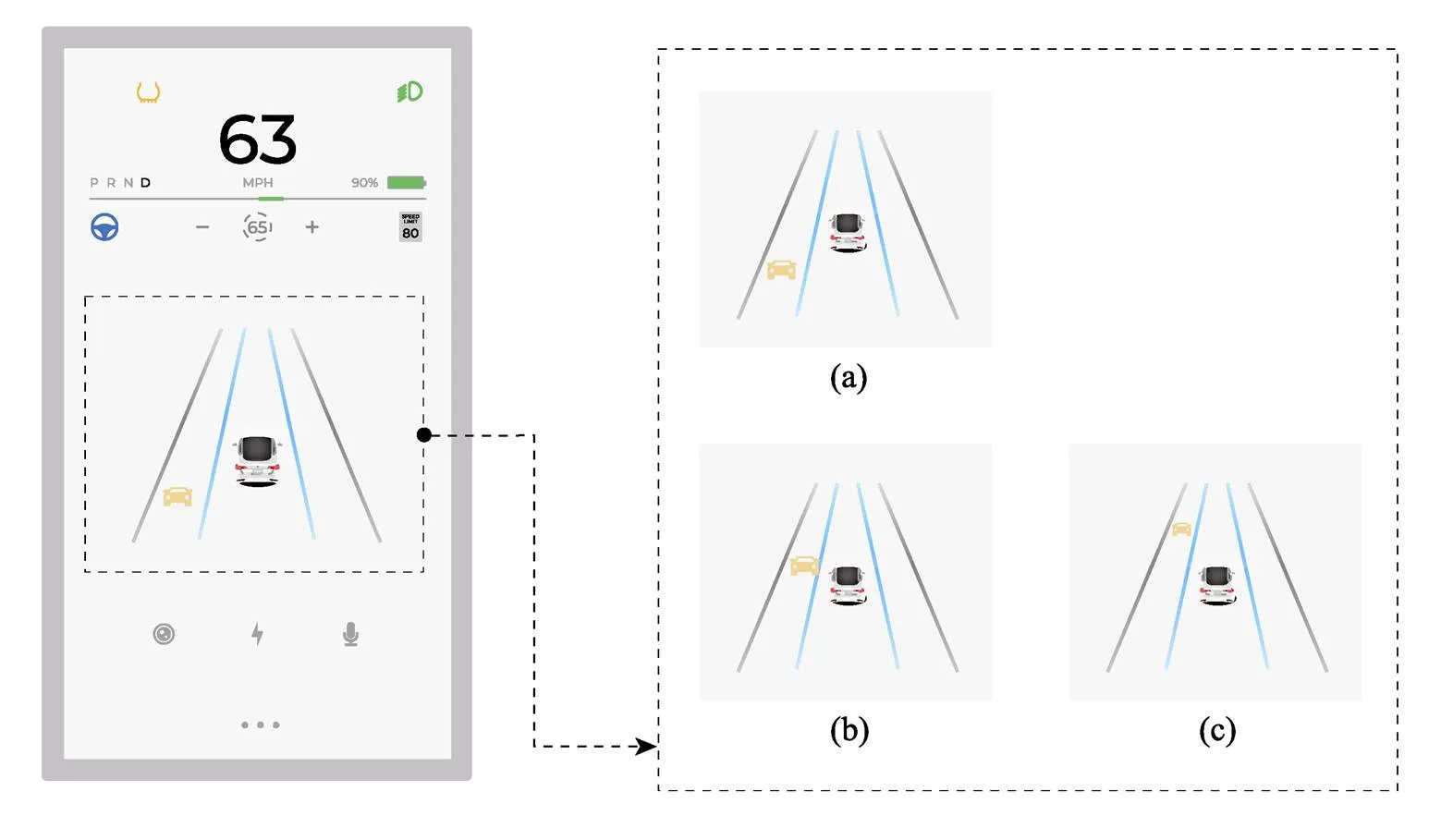
图5 HMI 1(仅显示SAT 1相关信息)
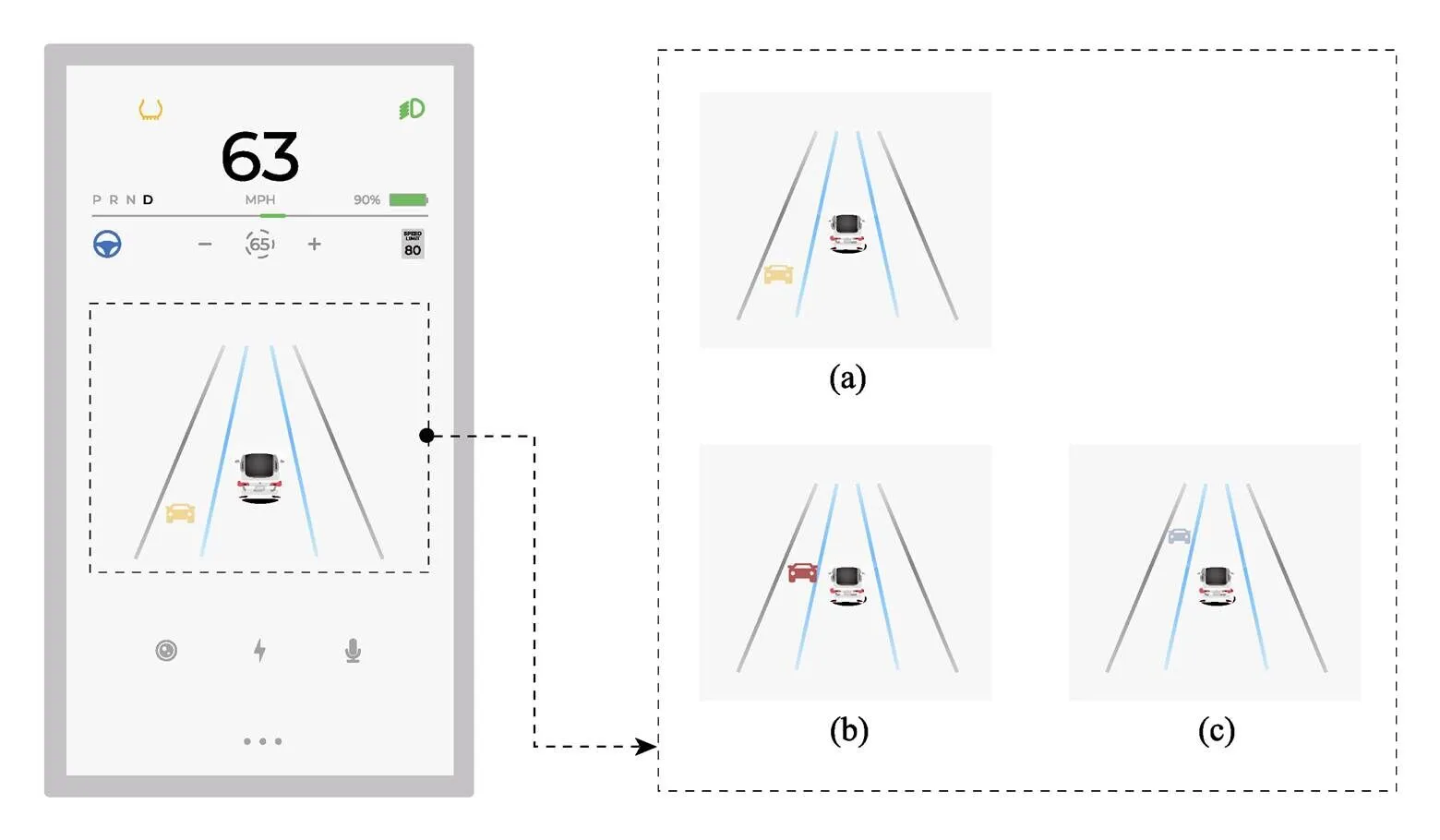
图6 HMI 2(显示SAT 1+SAT 2相关信息)

图7 HMI 3(显示SAT1+SAT 2+SAT 3相关信息)
3 实验评估
使用驾驶模拟器搭建出了一个相对真实的驾驶环境,邀请16名参与者,以特斯拉Model 3的HMI作为对照(HMI 0),对这三种HMI进行评估,以拉丁方顺序来展示HMI 1、HMI 2、HMI 3,以便平衡学习效应。主观数据使用目前较为通用的SAGAT量表、信任度量表及NASA-TLX量表,以便测量不同的HMI方案对驾驶员态势感知、信任度、工作负荷的影响,同时在每次驾驶结束之后,让驾驶员对HMI方案的整体感受进行评价。
3.1 参与者
实验共有16名被试者,其中8名男性,8名女性。平均年龄为32.1岁(SD为4.61),平均驾龄为7.3年(SD为3.11)。学历在本科及以上,对自动驾驶系统有一定的认知与使用经验。
3.2 实验环境
实验在驾驶模拟器上完成,如图8所示。其中的测试道路在Unity里进行建模,车道宽度、车道线的尺寸以及车道线类别均为国家标准尺寸,尽可能增加驾驶模拟中驾驶场景的真实性。在本实验中,选取了一条平坦路面上笔直的单向双车道,模拟驾驶测试任务都在此道路上完成。另外,还使用了一个10.8寸(1寸≈3.33 cm)的平板来显示任务过程中涉及的中控屏幕HMI界面,用一个15.6寸的显示器来显示任务过程中后视镜的场景变化。
3.3 实验过程
1)在测试之前,参与者会填写一份个人信息调查问卷,包括姓名、年龄、驾龄、学历、职业、驾驶频率等。

图8 实验环境
2)进行驾驶训练。参与者将在模拟器上完成5分钟的试驾,同时掌握模拟器上的一些基本操作,例如开启自动驾驶,接管车辆等,这一步旨在让参与者习惯模拟器。
3)在进行驾驶训练的同时,参与者被告知整个测试期间他们需要开启自动驾驶,并结合中控HMI及左右后视镜观察周围行车环境,参与者可以根据他们的信息需求去监控自动驾驶系统。
4)测试过程中,每个参与者会驾驶4次,每次呈现不同的HMI。由于HMI 0是空白对照,所以参与者第一次驾驶时中控屏幕上会出现HMI 0,此后的三次驾驶,将会以拉丁方的顺序向参与者呈现HMI 1、HMI 2和HMI 3。每个参与者的实验大约会持续1 h。
5)每次驾驶结束后,参与者需要填写一份关于信任度、态势感知及工作负荷的调查问卷。这些数据将会用来衡量不同透明度的HMI如何影响驾驶员对系统的信任度、驾驶员对周围的感知能力及工作负荷。
4 实验结果分析
4.1 量表数据
4.1.1 信任度
当屏幕显示HMI 0时,信任度量表得分作为对照,研究基于透明度的设计是否会影响驾驶员对系统的信任度,当屏幕显示HMI 1、HMI 2、HMI 3时的信任度量表得分则用来研究透明度模型中的三个层级如何影响驾驶员对系统的信任度,结果见图10。结果表明,当屏幕上为HMI 0时,驾驶员对系统的信任度得分为3.89(SD值为0.35),当屏幕上为HMI 1时,驾驶员对系统的信任度得分为4.72(SD值为1.01),当屏幕上为HMI 2时,驾驶员对系统的信任度得分为4.99(SD值为0.74),当屏幕上为HMI 3时,驾驶员对系统的信任度得分为5.14(SD值为0.59)。由此可见若HMI不显示任何透明度信息,驾驶员对系统的信任度最低,而HMI同时显示SAT 1、SAT 2、SAT 3相关信息时,驾驶员对系统的信任度最高。
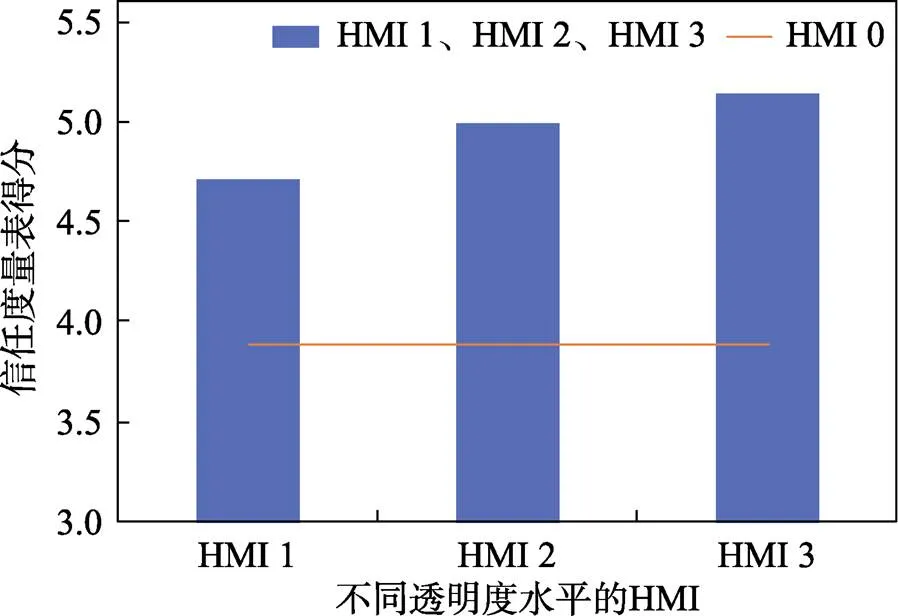
图9 信任度量表得分
4.1.2 工作负荷
由于不同透明度水平的HMI有着不同的信息量,这就意味着还需要探究随着信息量的增加是否给驾驶员带来了更大的工作负荷,这使用了NASA-TLX量表来衡量,结果如表4所示。从表4中可以看出,当屏幕显示HMI 0时,驾驶员的感知工作量最大,这是因为HMI 0没有对信息进行视觉上的区分,驾驶员无法在短时间内迅速获取自己想要的信息。当屏幕上显示HMI 1、HMI 2、HMI 3时,驾驶员的感知工作量随着信息的增加而增加,但是结果没有显著差异性。
表4 NASA-TLX量表得分
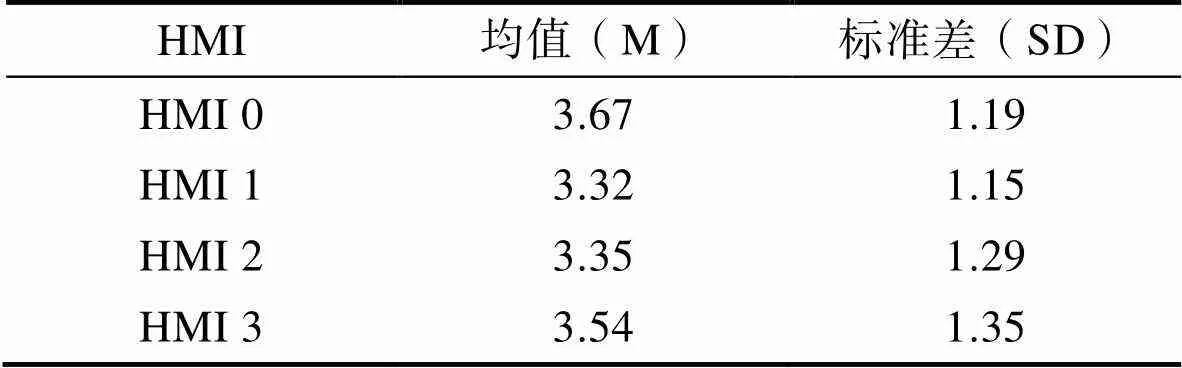
Tab.4 Nasa-tlx scale scores
4.2 相关性分析
4.2.1 信任度与态势感知
上文中信任度量表分数显示HMI 3的信任度最高,该结果是否与驾驶员态势感知水平有关?由于HMI 0不显示感知、理解、预判相关信息,因此对驾驶员态势感知水平的分析以HMI 1、HMI 2、HMI 3为主,对比了这三种条件下每个SAT级别的SAGAT得分。结果显示当中控屏幕上展示HMI 1时,用户的感知信息能力较其他方案强,而展示HMI 2时,驾驶员聚焦于理解系统当前的驾驶行为,其感知水平略有降低,当展示HMI 3时,驾驶员对即将发生的情况预测能力最强,同时感知和理解水平均有了提升。接着,对信任度与感知、理解、预判这三个影响态势感知的因素进行了相关性计算,结果见表5。
表5 信任度与态势感知的相关性分析

Tab.5 Correlation analysis between trust and situation awareness

由此可知,从态势感知的三个层级来看,信任度与界面上的理解类信息有显著相关性。可以认为在当前任务中,如果HMI能够帮助用户获得更好的态势感知,尤其是提供理解类信息时,用户对系统有更高的信任度。
4.2.2 信任度与工作负荷
同样地,为了探究随着透明度信息的增加,工作负荷是否会影响用户的信任度,对信任度量表总分与NASA-TLX量表总分及各选项得分进行了相关性计算,结果见表6。
表6 信任度与工作负荷的相关性分析

Tab.6 Correlation analysis between trust and workload
尽管三种方案之间的工作负荷并没有显著差异,但是工作负荷和信任度存在相关性,说明当用户面对HMI上所呈现的信息时,受到的工作负荷越大,对系统的信任度越低,其中,HMI上所显示的信息对用户注意力的占用,以及用户为完成任务付出的努力程度和信任度存在相关性。因此,在进行透明度设计时,为了避免用户降低对系统的信任度,设计元素需要减少对用户注意力的占用,例如采用醒目的颜色等,同时还要减少用户完成任务的努力程度。
4.3 访谈数据
这三种设计方案主要区别在于设计元素不同,为了探究哪些设计元素影响了信任度,在实验结束之后,又对参与者进行了访谈。与信任度相关的访谈主要从三个角度出发,分别是可预测性、可靠性、忠诚度。访谈问题见表7,访谈结果见图11。从访谈内容可以发现,当屏幕显示HMI 0时信任度分数之所以低,是因为驾驶员无法得出后方车辆距本车的距离,以及后方车辆向前超车时的速度。而参与者对HMI 3所显示的信息信任度最高主要有两个方面的原因,一是该方案使用不同的颜色对车况的危险等级做了区分,二是在驾驶员的视线盲区内使用黄色色块增加了预测信息,这有助于帮助驾驶员判断当车况发生改变时,系统是否具有处理能力。HMI 2只具备上述原因的第二条,HMI 1则没有使用颜色来区分危险等级,这是HMI 1和HMI 2信任分数不高的原因。
表7 访谈问题清单
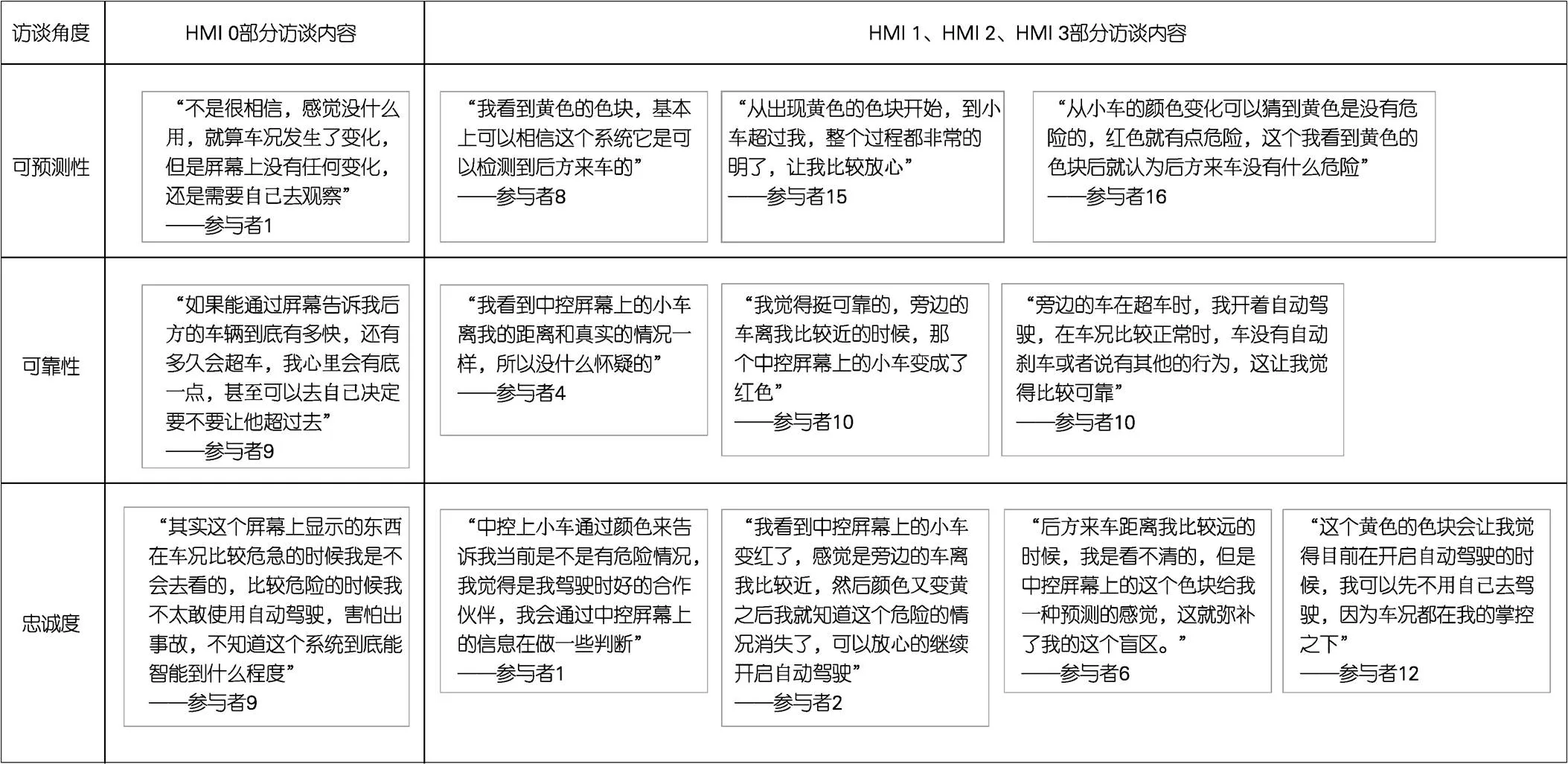
图10 访谈结果
4.4 实验结论
本文从三个维度(态势感知、信任度和工作负荷)评估不同透明度级别的HMI。实验数据表明当透明度级别越高,即提前预知驾驶员后方有车驶来,且用不同的颜色来区分后方来车相对本车的位置,极大地增加了驾驶员的感知能力,驾驶员对自动化系统的信任度也更高。另外,增加的信息量并没有对驾驶员的工作负荷产生明显的影响。在本次实验的三种HMI中,还能得到以下结论。
1)态势感知水平与用户对自动驾驶系统的信任度呈正相关,尤其是理解类信息,可以认为用户在开启自动驾驶时,更加关注HMI上显示系统对当前驾驶状态的理解,这表明了系统做出决策的原因。
2)工作负荷与用户对自动驾驶系统的信任度呈负相关。当提高HMI的透明度水平时,界面透明度信息对用户注意力的占据和用户为完成任务付出的努力程度会减少其信任度。当用户开启自动驾驶时,注意力集中在路况上,不太关注界面上信息的提示,如果自动驾驶系统当前的决策与用户自身对路况的认知相符,用户就会信任该系统。此外,用户信任的系统是智能的,不需要用户付出很大的努力去完成任务。
5 结语
本文主要研究了自动驾驶中基于透明度的HMI设计,将Chen开发的基于情景感知的透明度(SAT)模型引入自动驾驶场景中,发现HMI的透明度越高,用户对当前环境的态势感知能力越强,对系统的信任度越高。本文的创新点在于,当得出透明度会影响用户的态势感知和对系统信任度这一结论后,进一步对态势感知、工作负荷与信任度的相关性进行了更为细致的分析,这为以增强驾驶员信任度为目标的透明度设计提供了一种思路。
以上结论是在自动驾驶的超车场景中得出的,之后将对更多的自动驾驶场景进行研究,探索不同的场景中所需要的透明度信息,以及这些信息会从哪些方面影响驾驶员的态势感知、工作负荷以及信任度。
[1] LEE J D, SEPPELT B D. Human Factors in Automation Design[M]// NOF S Y. Springer Handbook of Automation. Berlin: Springer. 2009: 417-36.
[2] INTERNATIONAL S. Taxonomy and Definitions for Terms Related to On-Road Motor Vehicle Automated Driving Systems[J]. 2014, 3016: 1-12.
[3] PARASURAMAN R, SHERIDAN T B, WICKENS C D. A Model for Types and Levels of Human Interaction with Automation[J]. IEEE Transactions on Systems Man and Cybernetics-Part A Systems and Humans, 2000, 30(3): 286-97.
[4] ENDSLEY M R. Toward a Theory of Situation Awareness in Dynamic Systems[J]. Human Factors, 1995, 37(1): 32-64.
[5] Endsley M, Jones D, Betty Bolté. Designing for Situation Awareness[J]. Ergonomics, 2013, 56(4): 727-728.
[6] JOHANNSDOTTIR K R, HERDMAN C M. The Role of Working Memory in Supporting Drivers' Situation Awareness for Surrounding Traffic[J]. Human Factors, 2010, 52(6): 663.
[7] ENDSLEY, MICA, R. From Here to Autonomy: Lessons Learned From Human-Automation Research [J]. Human factors: The journal of the Human Factors Society, 2017, 59(1): 5-27.
[8] CHEN, J. Y C, BARNES, et al. Human–Agent Teaming for Multirobot Control: A Review of Human Factors Issues[J]. Human Machine Systems Transactions on, 2014, 44(1): 13-29.
[9] CHEN J, BARNES M J, SELKOWITZ A R, et al. Human-Autonomy Teaming and Agent Transparency; Proceedings of the Companion Publication of the 21st International Conference on Intelligent User Interfaces[C].Companion Publication of the 21st International Conference on Intelligent User Interfaces.New York: Association for Computing Machinery, 2016: 28-31.
[10] POKAM R, DEBERNARD S, CHAUVIN C, et al. Principles of Transparency for Autonomous Vehicles: First Results of an Experiment with an Augmented Reality Human-machine Interface[J]. Cognition Technology and Work, 2019, 21: 643-656.
[11] BILLINGS D R, SCHAEFER K E, CHEN J, et al. Developing Trust in Human-robot Interaction[J]. 2012: 109-110.
[12] CHEN J, BARNES M. J. Y. C. Chen and M. J. Barnes, Agent Transparency for Human-Agent Teaming Effectiveness[J]. 2015 IEEE International Conference on Systems, Man, and Cybernetics, Hong Kong, China, 2015, pp. 1381-1385.
[13] BONNIE M, MUIR. Trust in Automation: Part I. Theoretical Issues in the Study of Trust and Human Intervention in Automated Systems[J]. Ergonomics, 1994, 37(11): 1905-22.
[14] JIAN J, BISANTZ A M, DRURY C G, et al. Foundations for an Empirically Determined Scale of Trust in Automated Systems[J]. International journal of cognitive ergonomics, 2000, 4(1): 53-71.
[15] HOSONO K, MAKI A, WATANABE Y, et al. Implementation and Evaluation of Load Balancing Mechanism With Multiple Edge Server Cooperation for Dynamic Map System[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, PP(99): 1-11.
Human-machine Interface Design Based on Transparency in Autonomous Driving Scenes
WANG Jian-min, WANG Qiao-feng, ZHANG Jun
(College of Arts and Media, Tongji University, Shanghai 201804, China)
The work aims to select the typical scene of a vehicle coming from behind in autonomous driving to explore the influence of transparency-based human-machine interface (HMI) design on the driver's cognition. Literature review, scene analysis, experimental evaluation and other research methods were adopted to design the HMI in this scene by the Situation Awareness-based Agent Transparency (SAT) model, and the design was verified on a driving simulator. The results indicated that the HMI transparency level was positively correlated with the driver's trust in the system, but the perceived workload had no significant change. In addition, different levels of transparency affected the drivers' situational awareness ability, and the drivers' understanding of the current situation was significantly correlated with the trust. The transparency design of HMI will affect the drivers' cognition from three aspects: situation awareness, workload and trust. Therefore, it is necessary to focus on the influence of these factors when designing the transparency of human-machine interface.
autonomous driving; HMI design; transparency; trust; workload
TB472
A
1001-3563(2023)14-0152-10
10.19554/j.cnki.1001-3563.2023.14.016
2023–02–11
同济大学2022年智能新能源汽车协同创新中心智能驾驶舱子项目
王建民(1973—),男,博士,教授、博士生导师,主要研究方向为交互设计、信息架构设计、汽车交互设计、社会媒体计算。
汪巧凤(1998—),女,硕士生,主攻汽车交互设计、用户行为分析、用户体验。
责任编辑:陈作
猜你喜欢
汽车与安全(2020年1期)2020-05-14
中国外汇(2019年19期)2019-11-26
中国化肥信息(2019年5期)2019-06-25
消费导刊(2018年10期)2018-08-20
环球时报(2018-01-23)2018-01-23
中国卫生(2015年2期)2015-11-12
计算机工程(2015年4期)2015-07-05
系统工程学报(2015年3期)2015-02-28
现代企业(2015年5期)2015-02-28
现代企业(2015年5期)2015-02-28