基于边界元法的潜艇高空磁场特征分析
2023-08-07 09:20王学敏刘首善王颍航张钦程
科技创新与应用 2023年22期
吴 芳,王学敏,刘首善,王颍航,张钦程
(1.海军航空大学,山东 烟台 264001;2.92697 部队,海南 陵水 572400;3.91445 部队,辽宁 大连 116043)
边界元法是一种在半空间区域基于格林函数,通过标量磁位或矢量磁位分布求拉普拉斯的边值问题[1]。根据电磁场的基本原理,可将计算潜艇高空磁场分布的问题转化为求解空间磁位分布的问题。通过计算标量磁位的负梯度或是计算矢量磁位的旋度[2-3],可以得到潜艇目标磁源在空间中的磁场分布情况,该方法具有较高的精度。
反潜机使用磁探仪对水下目标进行探测时,由于距目标较远,磁探仪接收到的磁异常信号能量将直接影响设备的探测效能。文献[4]根据边界元法的基本原理,建立了潜艇磁场的高空预测模型,并对该模型进行了理论验证。本文基于潜艇磁场的高空预测模型,结合航空磁探仪实际搜潜过程,仿真分析潜艇不同运动航向,以及反潜机不同搜索高度下,潜艇磁场的空间特征。
1 潜艇磁场组成
地球是一个巨大的磁场,潜艇上的大部分设备与材料都是良好的磁化材料,所以潜艇在磁场中极易被磁化,并在其周围空间产生方向不同、强度各异的磁场。潜艇磁化后的磁场可以分为永久磁场、感应磁场及变化磁场3 个部分[3]。
1.1 永久磁场
潜艇一般都是由高强度的合金钢制成,属于铁磁性材料。在建造潜艇的时候,要经过电焊和铆接等工艺,会产生磁场。铁合金含有“磁畴”,每一个磁畴都是一个小的磁体,有南北极。当磁畴无规则排列的时候,会产生一个很小的磁力线圈图。当把这种含有磁畴的合金放在稳定的磁场中,它的分子会被激励,在被锤击和受热后,磁畴自己趋于定向,形成南北极,使所有磁畴的磁场都得到加强。地球的磁场虽然不是很强,但是潜艇是一个很大的钢结构体,不可避免地要在地磁场的作用下加工和建造,在这个过程中,材料内部应力的反复变化、温度的升降变迁及局部磁场的影响,都会引起铁磁材料内无磁滞磁化的形成,在潜艇建成形成潜艇的永久磁场。由于潜艇的结构很复杂及外形曲面的不规则性,现代消磁技术并不能完全消除掉潜艇的永久磁场,特别是潜艇的纵向永久磁场和垂直方向永久磁场还无法分离。潜艇的磁场有3 个主要的分量:垂直分量、纵向分量、横向分量。这3 个部分合起来构成了潜艇完整的永久磁场。
1.2 感应磁场
潜艇服役后在地磁场的作用下工作,潜艇各部分的铁磁材料内部会引起可逆的磁化过程,从而产生潜艇的感应磁特性。潜艇在水下航行时,受波浪和爆炸的冲击,或者受高速水击作用等振动后,也会产生感应磁场。由于感应磁场的存在,潜艇在某一纬度海域长期活动,潜艇的固定磁场会慢慢接近某一固定值。但是,当潜艇转移到另一个磁纬度区航行一段时间后,潜艇的固定磁场就会再次变化,并逐渐地稳定到另一个相应的稳定值上。
感应磁场的大小主要与潜艇所在磁纬度的地磁场的大小、潜艇的航向、潜艇本身摇摆的变化、潜艇所用钢材的磁性能和潜艇的形状等因素有关。目前的常规潜艇受内部空间及耗能的限制,大多数未装消磁系统,因此感应磁性无法及时消除。潜艇的感应磁性与永久磁性共同作用,引起潜艇所在位置周围地磁场的异常。
1.3 变化磁场
潜艇的感应磁场和固定磁场由于地磁场磁化而产生,称为磁化静磁场,潜艇的涡流磁场、杂散磁场、低频磁场是电流引起的磁场,称为变化磁场。
潜艇磁场就是由于铁磁性潜艇受地磁场磁化而产生的附加磁场。它将引起周围空间磁场分布的改变。航空磁探仪通过探测潜艇目标的磁异常信号来发现目标。因此,潜艇磁场是航空磁探仪搜索目标的信息源。由于磁场受海水、空气、泥沙等介质的影响小,使得基于磁异常信号的航空磁探测具有可靠性强、隐蔽性好、定位精度高、搜索连续和反应迅速等特点,成为水下磁性目标探测的重要手段。为提高航空磁探仪的检测能力,进一步对潜艇目标进行定位和识别,需要分析潜艇目标的高空磁场分布特征,为航空磁探仪提供目标信号参考。
2 基于边界元法的潜艇高空磁场预测模型
由边界元法原理,可得到P 点处潜艇的磁感应强度为
式中:n 为包络观测面S 上的单位外法向量;BQ为包络观测面S 上Q(x0,y0,z0)处的磁感应强度。
为得到实际条件下适用的潜艇磁场预测模型,对式(1)进行离散化,则
式中:Mi为第i 个平面剖分的边界单元数,i=1,2,…,6;nij为第ij 个平面的单位法向量;BQij为单元ij 的测量磁感应强度数据,j=1,2,…,Mi;Sij为测量单元ij的面积。
潜艇磁场预测模型的包络观测面示意图如图1 所示。假设采用长方体包络面包围潜艇磁源进行三分量磁场测量,边界面的划分及测量点的布放规划如图1所示。测量得到面积单元ij 的磁感应强度数据BQij,并记录各观测点的坐标信息及该面积元的单位法向量,根据式(2)可以进行潜艇空间磁场预测。
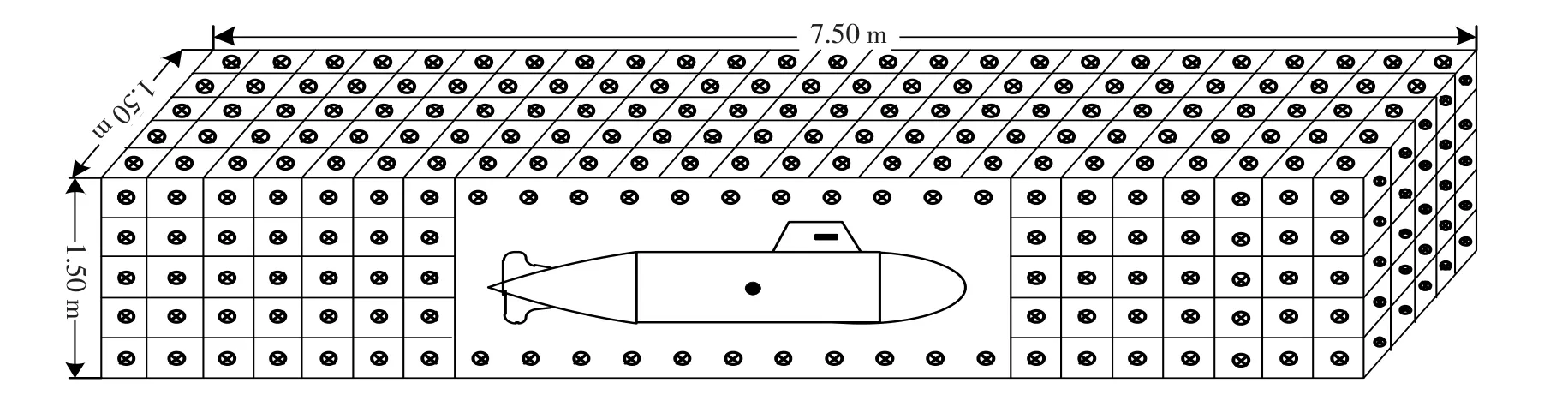
图1 预测模型的观测面
3 潜艇高空磁场信号仿真分析
本节主要根据潜艇高空磁场预测模型,即式(2),仿真分析潜艇高空磁异常信号的空间特征。
仿真数据:①潜艇目标,长半轴为2.8 m,短半轴为0.2 m 的铁磁性旋转椭球体;②长方体测量区域,长为7.50 m,宽与高均为1.50 m 的长方体表面;③边界面划分,将上下两表面和左右两侧面各分成125 个长方形面积元,将前后两侧面各分成25 个长方形面积元,则整个边界面共分成550 个长方形面积元;④地磁总场约为50 000 nT,磁倾角为52°,磁偏角为-3°。
3.1 潜艇一定航深、不同运动航向条件下的高空磁场分布
通过测量潜艇缩比模型在东、西、南和北4 个典型航向上的包络面磁场数据,根据预测模型得到潜艇目标在4 个航向上的空间磁场分布,并投影到地磁场方向得到总场值,如图2—图5 所示。
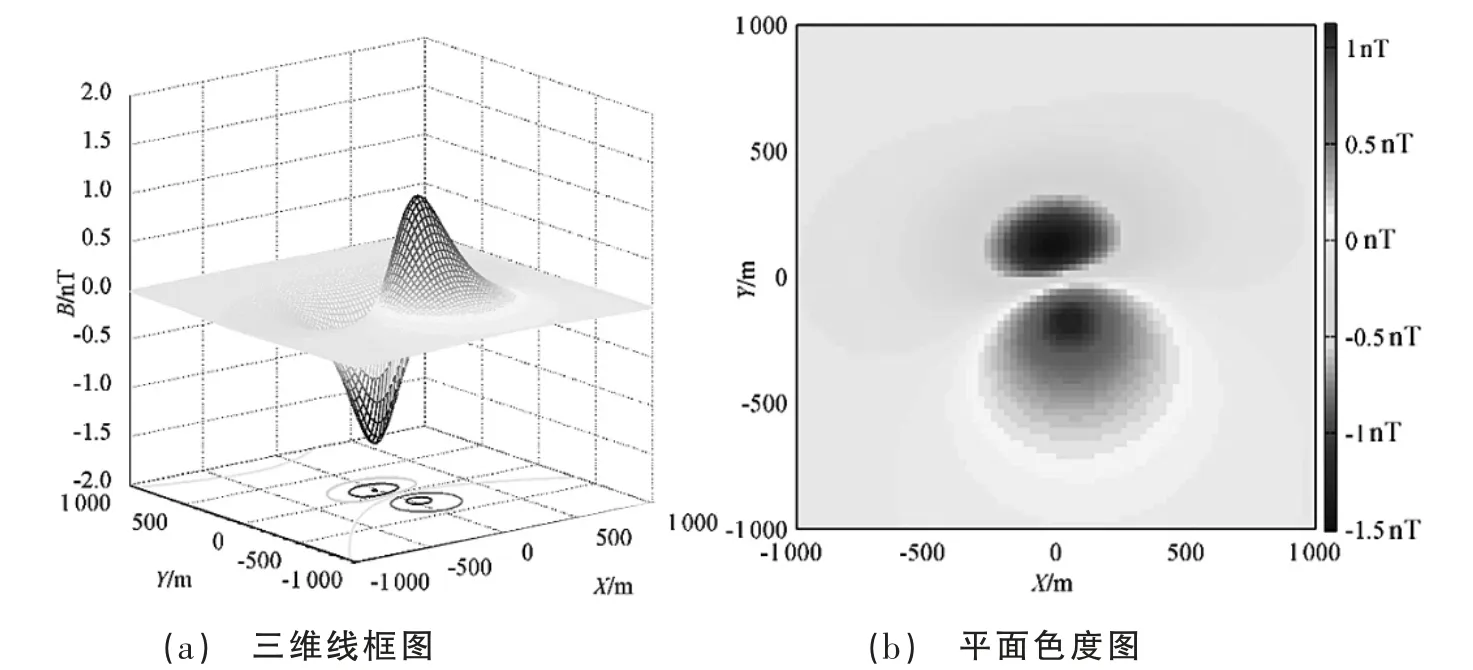
图3 东航向
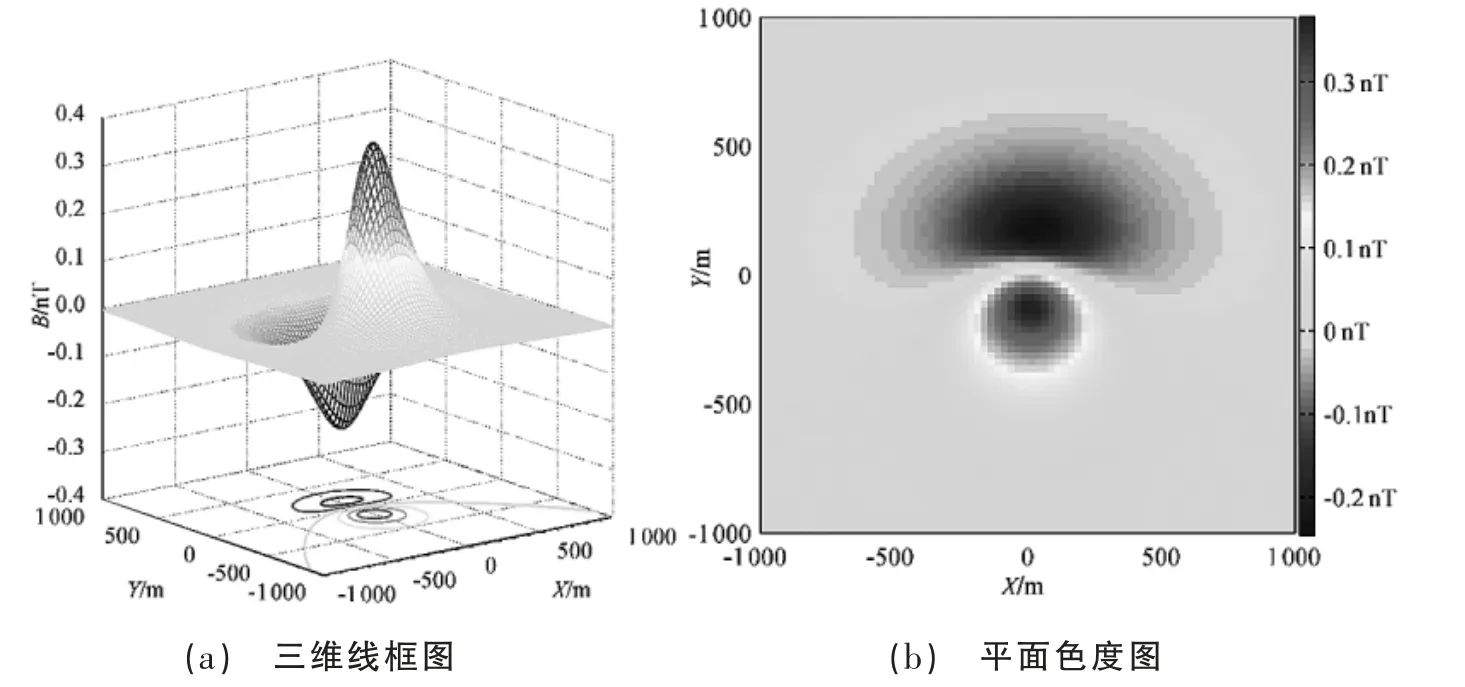
图4 南航向
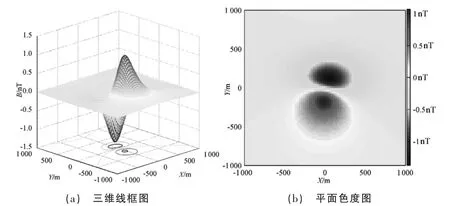
图5 西航向
由图2—图5 对比潜艇的4 航向高空300 m 的总场分布可以发现,潜艇4 航向总场空间分布形状基本相同,均具有1 个正峰和1 个负峰。4 航向之间的区别在于正峰与负峰之间的位置及幅值大小。就峰值而言,北航向空间磁场最大,东航向次之,南航向空间磁场的峰值最小。北航向、东航向、西航向的正峰幅值均小于负峰幅值,南航向反之。
3.2 潜艇一定航深、不同高度条件下的磁场分布
潜艇上方100、300、500 和700 m 的磁场分布如图6 所示。
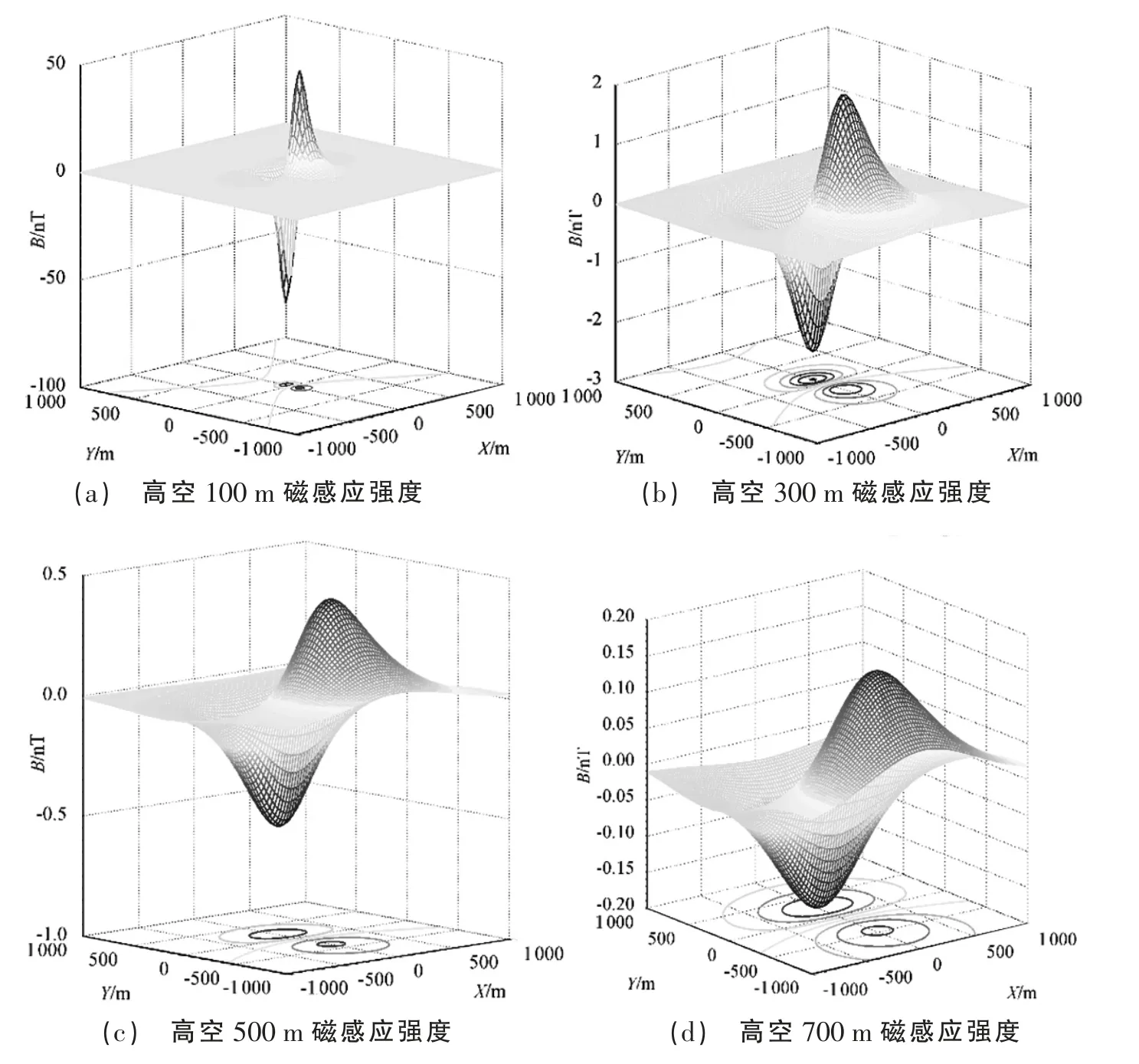
图6 总场分布随距离的变化
由图6 可知,对比潜艇高空100、300、500 和700 m总场分布不难发现,随着空间探测点与潜艇之间距离的不断增大,信号衰减快。随着高度不断增加,潜艇磁场的空间波形基本保持一致。当磁探仪以同等速度及采样频率按相同的采样轨迹从潜艇上方经过时,磁探仪采样获得的信号宽度不断增大。
4 结论
由边界元法建立的潜艇高空磁场预测模型可延拓得到潜艇磁场的空间分布,基于潜艇高空预测磁场模型,本文仿真分析了潜艇在不同运动航向、不同高度的空间磁场分布特征。由仿真结果可知,不同运动航向条件下,潜艇总场空间分布形状基本相同,均具有1 个正峰和1 个负峰;随着空间探测点与潜艇之间距离的增大,信号衰减,但潜艇磁场的空间波形基本保持一致。各航向之间高空磁场分布区域性明显,具有一定的分布特征,能够为航空磁探仪的目标探测和识别提供支持。通过仿真分析潜艇目标的高空磁场分布特征,为提高航空磁探仪的检测能力,以及进一步对潜艇目标进行定位和识别提供理论支持。
猜你喜欢
新世纪智能(高一语文)(2021年3期)2021-07-16
中国棉花加工(2020年3期)2020-01-15
民用飞机设计与研究(2019年4期)2019-05-21
新农业(2018年3期)2018-07-08
新农业(2018年3期)2018-07-08
电子制作(2017年24期)2017-02-02
系统工程与电子技术(2016年11期)2016-11-11
电源技术(2016年9期)2016-02-27
中国棉花加工(2016年2期)2016-02-04
法大研究生(2015年2期)2015-02-27