可变姿态扑翼腿水陆两栖机器人设计
2023-08-21 08:43高健乔查江涛孙羽翀
科技创新与应用 2023年23期
高健乔,查江涛,李 桐,孙羽翀
(哈尔滨工程大学,哈尔滨 150001)
传统的水下潜器推进方式如依靠螺旋桨和喷水推进实现推进,在低速情况下机动性较差,并会在推进时产生较大的噪声,对周围环境干扰较大[1]。水下推进器在低速下的机动性、噪声与对周围环境影响的控制是制约当前水下航行器效能发挥的主要因素。
水陆两栖机器人多为推进器腿式和推进器履带式,水下推进机构与陆地行走机构分离,结构复杂,推进效率低下。
目前尚未有成熟的采用非常规推进方式作为水下推进的水陆运动机构一体化的两栖机器人出现,一种结构简单可靠、行进效率高、扰动小的两栖机器人开发需求迫切。
1 主体结构设计
机器由3D 打印结构件、亚克力防水舱、电路硬件、腿部结构和浮球组成。机器人尺寸为750 mm×600 mm×95 mm。
如图1 所示,3D 打印结构件包括承载防水舱的主体及头部、尾部、机身左右的外壳。

图1 水陆两栖机器人内部结构图
电路硬件包括在防水舱内的24V6S 的锂电池、分电板、STM32F4 主控板、6 个闭环一体式步进电机、3 个水气两用泵及在浮球上的信号接收机组成。
浮球漂浮在水面上,与水下机身靠电缆连接,如图2 所示,浮球上载有无线信号接收机用来接收控制信号(也可采用水声通信来取缔电缆和浮球)。
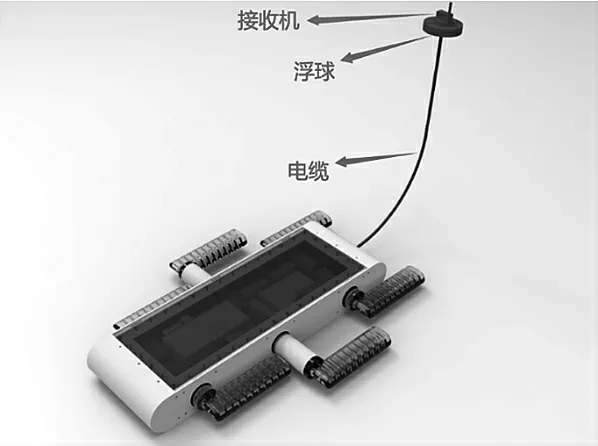
图2 水陆两栖机器人通信电缆结构图
机身侧面在水面漂浮的水线上方有通气孔,用于吸排空气/水,气孔通过气管与水气两用泵连接,并做好防水,防止水在舱内泄露。
气动柔性腿可根据内部空腔压力的改变来改变姿态,内部不加压时为扑翼状态,可作为水下运动机构[2],当加压后气动柔性腿发生卷曲,可作为陆地上的运动机构。
2 柔性腿设计
通过对不同形状的柔性腿进行仿真对比,最终确定了设计方案,柔性腿形状为扁平的蹼状。柔性腿尺寸图如图3 所示。
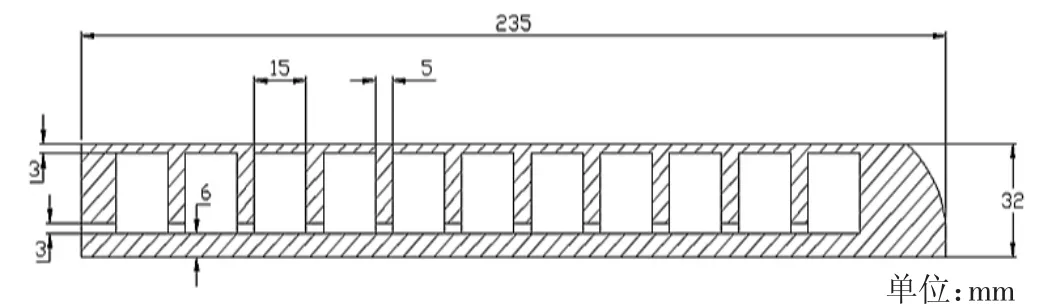
图3 柔性腿尺寸图
柔性腿模型如图4 所示,运用ABAQUS 软件进行气驱动及水驱动变形仿真,添加材料属性、约束关系、驱动条件后仿真结果如图5—图8 所示。
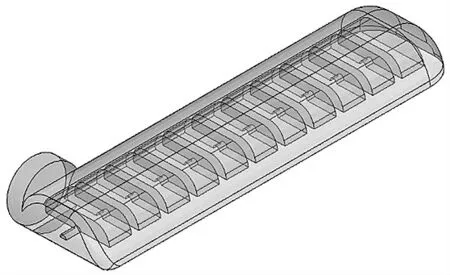
图4 柔性腿模型图

图5 不加压初始状态
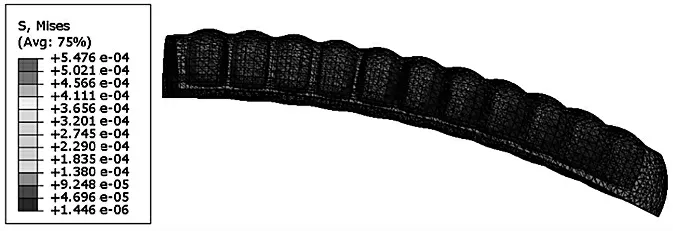
图6 压力为40 kPa

图7 压力为100 kPa

图8 内部充水模拟情况
当柔性腿内部空腔充气加压时,随着气压增大柔性腿会向硅胶厚度大的一面弯曲[3],但当空腔内部气压超过一定限度时,此时增大气压,柔性腿将逐渐膨胀并趋近于初始的弯曲形态,不再继续卷曲,如图9 所示,所以当机器使用时需测试环境条件下的合适气压。
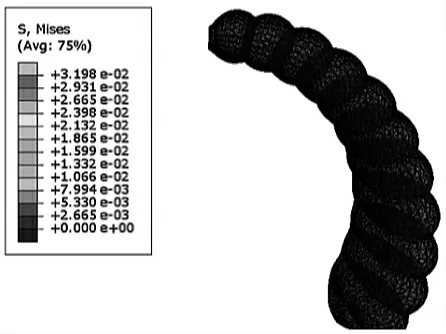
图9 压力为200 kPa
3 工作模式
如图10 所示,机器人拥有水下和陆地2 种工作模式。
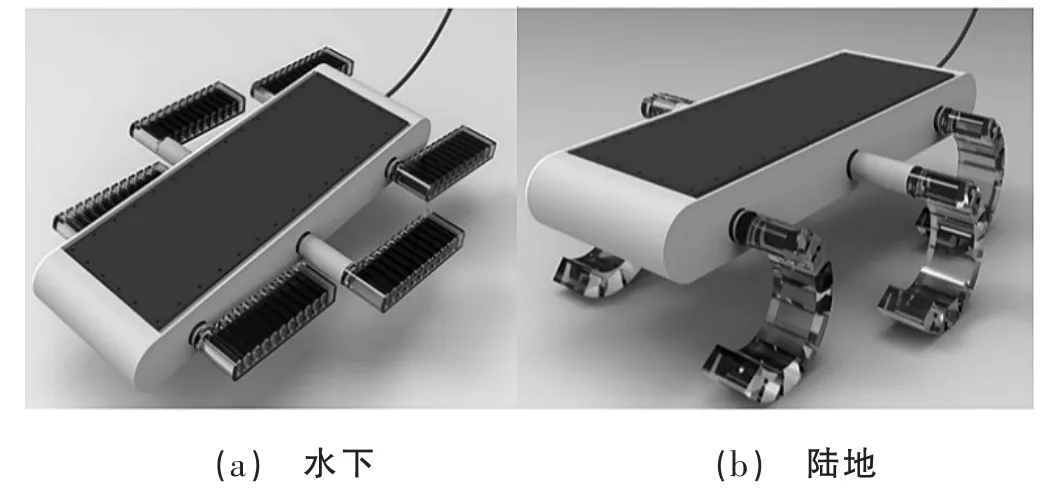
图10 水陆模式切换示意图
3.1 水下运动动作
当柔性腿未加压充气时,在水中柔性腿内空腔灌满水,柔性腿为蹼状板型,依靠6 个电机的定轴转动来连带柔性腿摆动,可实现前进、后退、转向、翻滚、垂直的上浮和下潜的机动动作。
如图11 所示,动作由6 个电机(①~⑥)转动连带柔性腿往复摆动来实现。

图11 电机及充气泵位置图
3.1.1 运动参数
对于不同的动作,使用矩阵A 来表示不同动作每个电机所转动的开始角度θ0i和结束角度:
3.1.2 协调参数
使用一个两行一列的矩阵B 用来描述在水下不同动作时6 个电机的协调情况,第一行βi是6 个电机的不同占空比情况,分别代表第i 个腿的电机;第二行的参数γi是每个腿在第一个周期内开始运动的时间。
1)前进动作。运动参数为
即每条腿的初始角度都为-30°,终止角度为30°。
协调参数为
即每条腿的占空比都为0.5,每条腿的电机同时触发。
2)后退动作。运动参数为
即每条腿的初始角度都为30°,终止角度为-30°。
协调参数为
即每条腿的占空比都为0.5,每条腿的电机同时触发。
3)转向动作。右转运动参数为
即①、③、⑤号电机30°为起始位置,-30°为终止位置;②、④、⑥号电机-30°为起始位置,30°为终止位置,
右转协调参数为
为了中部的转向平稳,经实验测试选择①、②、⑤、⑥号电机的占空比为0.6,③、④2 个电机的占空比为0.4,①、②、⑤、⑥电机同步开始运动。③、④2 个电机延迟0.5 个单位时间运动。左转运动与之类似。
4)上浮下潜动作。上浮运动参数为
即每条腿的初始角度都为60°,终止角度为120°。
上浮协调参数为
为了中部的上升平稳,经实验测试选择①、②、⑤、⑥号电机的占空比为0.6,③、④2 个电机的占空比为0.4,①、②、⑤、⑥电机同步开始运动。③、④2 个电机延迟1 个单位时间运动。下潜运动与之类似。
5)翻滚动作。运动参数为
即①、③、⑤号电机60°为起始位置,120°为终止位置,②、④、⑥号电机-60°为起始位置,-120°为终止位置。
协调参数为
即①、②、⑤、⑥号电机的占空比为0.6,③、④2 个电机的占空比为0.4。
3.2 陆地运动
一个周期内的步态可大体分为2 个部分,①、④、⑤腿为一组,②、③、⑥腿为一组,当①、④、⑤进行第一部分的同时,②、③、⑥进行周期内第二部分,2 组腿呈三角步态交替前进(图12)。
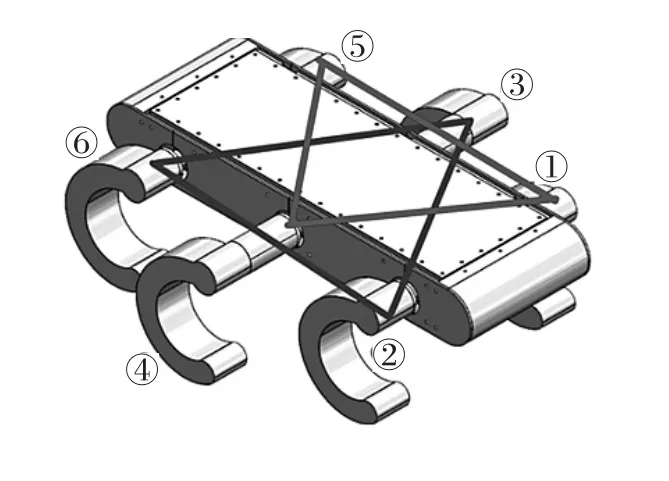
图12 腿分组示意图
P、Q为在陆地上行驶时2 组腿部的三角步态矩阵以及步态随时间演变的模拟[4]。ε 表示腿部站立,τΔ 表示腿部摆动。
4 软件设计
4.1 软件控制框架
软件控制框架如图13 所示,选择的步进电机为自带驱动和电机控制模块的步进电机,将6 个步进电机挂载在同一条CAN 总线上通过CAN 通信发送相应的指令控制6 个步进电机完成相应的动作需求。同时,为了实现远程无线控制,选择了无线控制套件(包含一个2.4 GHz 接收器和一个无线遥控器),通过DBUS 的方式与2.4 GHz 接受器通信。
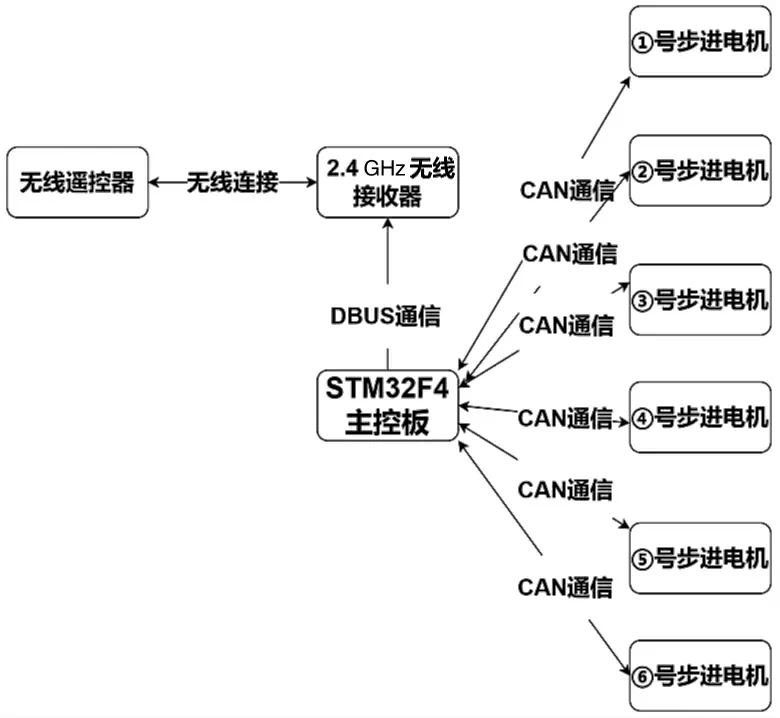
图13 软件控制框架图
4.2 DBUS 通信协议
DBUS 协议是类UART 的一类私有协议,具有UART 的共同特征,波特率为100 kbps,单元数据长度为8,奇偶校验位为偶校验,结束位为1,无流控。
需要注意的是DBUS 信号控制电平符合TTL,却和普通UART 信号是相反的,所以,需要在MCU 端需要增加三极管取反电路,MCU 才能正常识别出UART信号。
DBUS 协议:当遥控器与接收机建立连接后,接收机每隔14 ms 通过DBUS 发送一帧18 字节数据,包含了拨杆以及遥杆的信息。用于控制机器人移动方向以及移动速度大小。
4.3 步进电机控制器通信协议
步进电机的通信协议遵循CAN2.0B 协议,驱动器通信的扩展帧中定义了29 位扩展标识符(SID)+8 字节数据,标识符部分的定义如图14 所示。
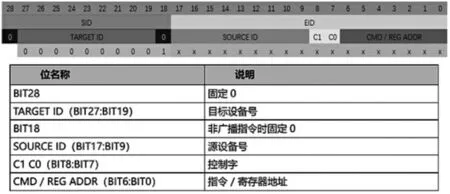
图14 标识符定义图
上位机可向驱动器发出操作指令以控制驱动器完成各项工作。控制指令的通信帧中,需要进行如下设置。
目标设备ID:设置控制对象驱动器的设备ID。
源设备lD:上位机发送指令时设置为“0”(只限扩展帧使用)。控制字:C1=1、C0=1。
指令码:驱动器CAN2.0 私有协议中,规定了各个指令码对应控制驱动器工作的各项指令。通过发送不同的指令码,控制电机的位置以及速度。
指令参数:指令分为无参数指令及有参数指令2 种,使用有参数指令时,在通信帧数据部分中设置参数值。
5 实验测试
尺寸:0.75 m×0.60 m×0.095 m。
机身尺寸:0.75 m×0.35 m×0.095 m。
机器人重量:15.30 kg。
净排水重量:16 kg。
储备浮力重量:2.3 kg。
水中运动速度:0.28 m/s。
陆地运动速度(三足步态):0.16 m/s。
机器人电池容量:8 000 mAH。
机器人在水中的扑翼运动效果与扑翼的大小、形状及材质有关。一般来说,扑翼的面积越大、材质越硬,扑翼摆动产生的力越大,但会造成机器人的运动颠簸。根据样机实测,蹼板状形状配合半刚性半柔性材料的扑翼运动效果最好。
气动柔性腿方案设计在标准大气压下加压至100 kPa 左右达到陆地上卷曲腿部的形状要求,且机器人在陆地上运动时,单个腿部可承受5 kg 的重量,腿部材料无大变形损坏。
通过webots 机器人运动学仿真结果可知,陆地上的腿部运动步态方案可行,可实现前进及转向,设计方案在陆地上的运动效果良好,可实现在崎岖越野地形、阶梯状地形、滩涂地形的运动。webots 运动模拟图如图15 所示。
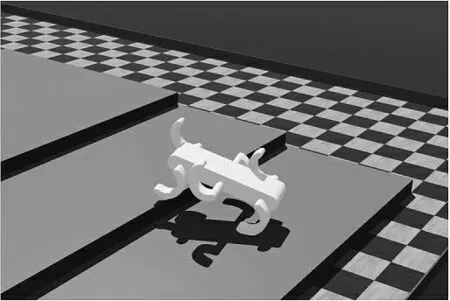
图15 webots 运动模拟图
6 结束语
文中提出的可变姿态扑翼腿水陆两栖机器人,运用同一结构的2 种状态来实现水下和陆地运动,姿态模式切换简单自如,机械结构简单可靠。水中采用扑翼推进方式对周围环境干扰小、效率高,可实现水下六自由度运动。陆地上采用腿式步态对各种崎岖地形的适应能力强。
利用abaqus 软件对可变姿态柔性扑翼腿进行了加压驱动仿真,根据仿真结果进行了可变姿态扑翼腿的迭代设计,并根据设计模型制作出水下运动样机进行实验测试,样机在水下可完成前进、后退、转向、上浮、下潜和翻滚的六自由度运动。并在webots 中对机器人陆地上的运动步态进行模拟,模拟结果显示机器人在陆地上机动性良好。
猜你喜欢
保健医苑(2023年2期)2023-03-15
玩具世界(2022年2期)2022-06-15
大科技·百科新说(2022年4期)2022-05-30
小哥白尼(军事科学)(2019年7期)2019-11-16
电子制作(2018年18期)2018-11-14
自动化学报(2018年6期)2018-07-23
小哥白尼·趣味科学画报(2016年1期)2016-05-30
恋爱婚姻家庭(2015年27期)2015-12-19
恋爱婚姻家庭·养生版(2015年9期)2015-05-14
发明与创新(2015年33期)2015-02-27