基于嵌入式的光伏发电自动跟踪控制系统设计及应用效果分析
2023-08-21 08:44谭建斌
科技创新与应用 2023年23期
谭建斌
(佛山职业技术学院 电子信息学院,广东 佛山 528137)
基于太阳运行轨迹的自动跟踪控制系统,能够通过实时数据采集及计算运行,得出太阳方位角及高度角曲线,并将二者与仿真曲线进行对比分析,可知实践模型与理论模型在一定程度上达到契合,因此嵌入式光伏发电自动跟踪控制系统具有一定的稳定性,可进行推广应用。
1 嵌入式光伏发电自动跟踪控制系统设计
1.1 自动跟踪控制系统硬件设计
1.1.1 核心控制模块设计
本文在进行自动跟踪控制系统硬件设计时,为了考虑使用性能及可操作性,核心处理芯片选取了32 位ARM7TDMI-S 微控制器LPC2138,该核心处理芯片进行指令及译码过程比较简单,方便后续模块设计,核心控制模块的具体设计流程如下。
1)核心处理芯片的片内存储为32 KB,Flash 程序存储器片内存储为512 KB,其接口的宽度设置为128 位。
2)核心控制模块的下载路径要求兼容在系统中编程(IAP)及在应用中编程(ISP)2 种方式,在设计Flash编辑及擦除环节时要求反应速度在0.5 s 内。
3)在设计嵌入式跟踪接口时,要进行执行代码编写,使其具备实时调试及高速跟踪功能。
4)系统要设计出2 路UART、2 个运行速度较快的I2C 接口,同时配备SPI 及SSP 等串联接口。
5)核心控制模块要能满足随时更新扩容的要求,因此通用接口I/O 要达到47 个以上,而且电压设置要达到5 V。
6)核心控制模块在掉电或者不做功模式下,要设置出低耗电模式,如果存在意外掉电,进行外部中断后要能够唤醒,在进行单电源供电时,将CPU 的电压设置在3.0~3.6 V。
7)核心控制模块的模拟输出要设置出不同档位,通过2 个8 路A/D 转换器及1 个D/A 转换器可以满足该要求。
1.1.2 电路设计
1)复位电路设计。复位电路设计需要配合核心处理芯片的性能,增加带有I2C总线存储器的电源监控芯片CAT1025JI-30,该芯片具备低功耗特点,能够将2 K的串行EEPROM及掉电保护电源监控电路压缩到一个芯片内[1]。同时设置复位键(RST)进行复位信号的传输,CAT1025JI-30接收到信号后对I2C发出读写指令,此时对芯片SCL及SDA两引脚设计连接到相应的接口,并在I2C电路上设计2个上拉电阻,具体复位电路设计如图1所示。
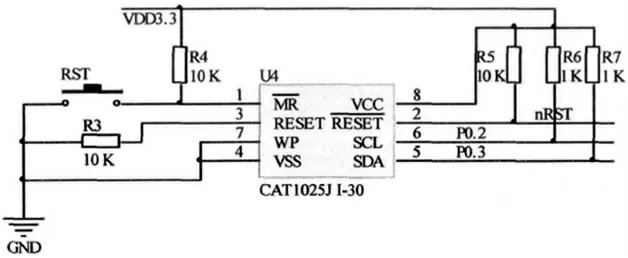
图1 复位电路设计图
2)晶振电路设计。本设计主要采用外部晶振,结合核心处理芯片设计要求,晶振采用11.0592MHZ 的型号,并将其放置在微控制器LPC2138 的2 个时钟引脚之间(XTAL1、XTAL2)。晶振电路设计要求接地,采用30 pF 的电容C1 及C2 在两端处进行接地连接,具体设计如图2 所示。
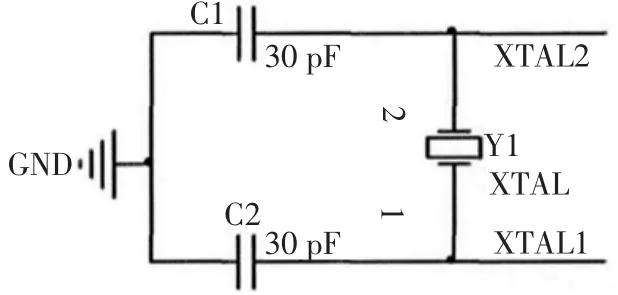
图2 晶振电路原理图
1.1.3 电源模块设计
电源模块为整个硬件系统提供动能,其设计要包含:输出电流、电压、功率、输入电压、电流、输出纹波、电磁兼容及电磁干扰、体积限制及功耗限制、成本限制和安全因素。本设计中微控制器LPC2138 耗能较低,可以与I/O 设计连接一个电源,并采用3.3 V 单电源进行供电,结合市面上的电源型号,较为理想的为LDP芯片SPX1117M3-3.3,该芯片在输出电流上能够达到800 mA,而且输出电压的精度能够控制在±1%以内,在运行过程中能够对系统进行电流限制及过热保护[2]。电源连接的电路需要设计为5 V,并采用外部供电,设计瞬态电流限制功能时采用电感L1 来执行,并配合电容C3 及C4 来达到滤波的目的。
1.1.4 通信接口设计
嵌入式光伏发电工程中应用的自动跟踪控制器的通信接口需要在每一个节点上设计电路,采用DC-DC电路即可满足要求。通信接口设计采用RSM485 型号的芯片,核心模块中微控制器LPC2138 型号具有2 路UART,因此与之连接的RSM485 也要设计2 个,分别用UART0 和UART1 来表示,前者实现了轴控制器及跟踪控制器之间的通信,后者实现了跟踪控制器及监控上位机之间的通信。配合RSM485 芯片设计还需配置一个专门的I/O 接口,负责控制访问,I/O 与UART0连接的接口为P0.31,I/O 与UART1 连接的接口为P0.10,通信接口具体设计如图3 所示。
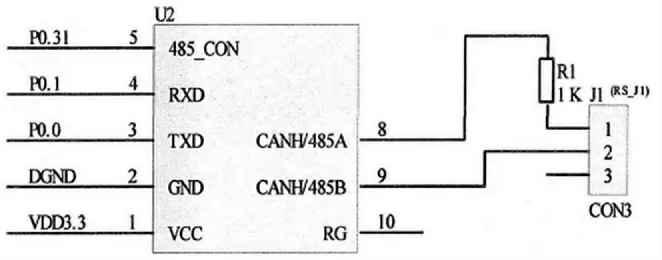
图3 RSM485 通信电路设计图
1.1.5 调试接口设计
自动跟踪控制系统需要在使用前进行调试及试运行,为了满足软件系统调试要求,在硬件设计环节要安装一个调试接口。接口选择要考虑核心微控制器LPC2138的兼容性,本设计选用了20 脚JTAG 仿真调试接口电路,具备嵌入式调试功能,其接口连接4 条线路:TMS 线路设计为测试模式选择、TCK 线路设计为测试时钟、TDI线路设计为测试数据输入和TDO 线路设计为测试数据输出,通过以上程序进行接口调试操作,如图4 所示。

图4 JTAG 接口电路设计图
1.2 自动跟踪控制系统软件设计
1.2.1 跟踪控制任务主程序设计
跟踪控制任务主程序设计主要是在轴控制器与计算机之间进行信息传输、指令下达及任务执行,具体的设计流程如下。
1)系统初始化。设计时需要按照顺序进行引脚功能、串口的初始化,并进行串口模式的设置,接着进行I2C 的初始化设置及I2C 模式设置,再有需要设置PCF8563 的时间初始化设置。
2)跟踪条件判定。跟踪条件判定需要满足2 个要求,先计算出实时的太阳高度角及方位角,将数据代入函数pcf8563GetTime(),运用I2C 读取数据,看太阳高度角是否大于等于20°,再结合实时风速值,看是否小于20 m/s,如果同时满足以上2 个条件,可以判定为正常跟踪模式,如果没有同时满足以上2 个条件需要进入跟踪保护模式。
3)正常跟踪程序。在第2)步判定为正常跟踪模式后,系统需要设计太阳高度角及方位角的跟踪功能,本设计中采用EleAngelTrack()及AziAngelTrack()2 个函数实现跟踪控制函数的设计,程序进入设计阶段时应用串口UART0 来读取轴控制器上的太阳高度角及方位角。
方位角正常跟踪。其中方位角跟踪器设计时要配置增量式光电编码器,并对编码器进行软件四分频,将每度对应的脉冲值设置为4 096/360,此时需要计算组件实际方位角与实时方位角的差值脉冲,计算公式如下
根据式(1)计算得出的角度差脉冲如果大于11,需要检查RS485 总线下的电机状态是否为正行程限位,如果没有处于该状态需要重新计算跟踪指令;如果式(1)中计算得出的角度差脉冲小于-11,需要检查RS485 总线下的电机状态是否为负限位,如果为负限位则表示电机状态正常,能够进行方位角的跟踪控制[3]。
高度角正常跟踪。该环节采用绝对式角度传感器进行测量,计算高度角高度差时,运用组件实际高度-实时高度角公式,如果差值的绝对值大于1°,而且电机状态正常,则表示能够满足高度角的跟踪控制。
4)跟踪保护程序。在第2)步判定为跟踪保护模式后,将软件系统设置为保护程序,并进一步细化保护程序为夜晚放平保护及避风保护后,如果太阳高度角小于20°,计算机下达指令,控制发电机的转速,减缓转速后进入夜晚放平保护模式。如果风速大于等于20 m/s,计算机发出指令控制驱动电机,放缓电机转速后进入避风保护模式。
1.2.2 跟踪控制器通信程序设计
软件系统中RS485 总线负责轴控制器及跟踪控制器、跟踪控制器及监控上位机之间的通信,通信过程要求数据传输遵循相应的通信协议,本设计采用Modbus 协议,后续设计环节中各种控制器使用的公共语言必须遵守该协议,并要将设备节点地址也转换为Modbus 设备地址。Modbus 协议运行过程中会应用到ASCⅡ及RTU 两种传输模式,第一种模式传输1 个数据帧中的1 个字节,要应用2 个ASCⅡ字符来实现;第二种模式进行相同字节的传输则只需要2 个16 进制字符,因此在实际设计时要选用RTU 模式完成主机和相关设备之间的通信[4]。
2 嵌入式的光伏发电自动跟踪控制系统应用 效果
2.1 调试软件设计
试运行前的调试需要检测系统的运行状态,采用串行通信方式进行数据采集,并将数据传送至计算机,设置可视化设备后可以实时观测数据,并将数据及时存入关系数据库。本项目中运用Basic 语言来设计上位机调试软件,首先应用可视化程序设计语言(Visual Basic)进行编程,该过程依据事件驱动机制,程序设计要具备跟踪器通信功能,以及风速、风向、高度角和方位角的运行状态的实时跟踪功能,并将以上功能设计出相应的显示界面[5]。实际操作时需要上位机读取串口UART1 的信息,并通过RS485 总线反馈至上位机,期间获取的数据需要运用Microsoft Access 连接到数据库中:
cnn.Open"provider=microsoft.jet.oledb.4.0;data source= database.mdb;persist security info=false;"
rsl.CursorLocation=adUseClient
rsl.Open"selsct*from ARM1",cnn,ad OpenDynamic,adLockPessimistic...
上位机调试软件的编程设计属于计算机顶层的软件监控设计,此种设计能够连接多个跟踪控制器,相应的控制器需要赋予唯一的地址编码,以便后续跟踪识别,而且每个跟踪控制器在数据库中都有唯一一个表相对应。
2.2 工程应用
本文设计的嵌入式光伏发电自动跟踪控制系统实际运行时应用于10 MW 光伏并网电站,实际应用所采用的具体技术参数见表1。

表1 某光伏并网电站跟踪控制系统器主要技术参数
考虑周围环境及恶劣气候条件,需要将跟踪控制系统模块及电气控制模块放置在具有特殊功能的电气柜中,保证电气柜的各个功能器件连接到主机部分。
2.3 应用结果分析
选取12:50—13:50 时间段的太阳方位角与跟踪器组间方位角的数据进行对比分析(图5(a)),并选取12:00—13:00 时间段的太阳高度角与跟踪器组间高度角的数据进行对比分析(图5(b))。

图5 跟踪曲线图
结合图5 可知,在选取的跟踪时间段内,跟踪取得的数据曲线中图5(a)方位角曲线变化及趋势与仿真曲线相近似,角度差曲线与太阳位置曲线趋于重合,达到了预期要求。而图5(b)的高度角跟踪曲线的变化范围及趋势与仿真曲线存在偏差,分析现场运行环境可知,跟踪系统在风力较大的情况下,组件会发生晃动的情况,使得高度角测量存在误差,为了提升运行效果,可以在风速较小的情况下,采用多次测量计算得出平均值的方法来降低误差。
3 结束语
光伏发电优势较为明显,不仅储量丰富,而且应用范围广泛,通过嵌入式光伏发电自动跟踪控制系统的应用,实现了将太阳能转换成电能,进一步解决了能源紧张的问题。跟踪系统操作方便、结构简单,降低了工程成本,是电能行业未来应用的主要趋势。
猜你喜欢
卷宗(2021年2期)2021-03-09
空间科学学报(2020年4期)2020-04-22
电子制作(2018年12期)2018-08-01
铁道通信信号(2018年2期)2018-04-18
制造技术与机床(2017年6期)2018-01-19
电子制作(2017年19期)2017-02-02
电镀与环保(2016年3期)2017-01-20
当代化工研究(2016年6期)2016-03-20
河南科技(2015年18期)2015-11-25
单片机与嵌入式系统应用(2014年9期)2014-03-11