高精度舰载光电跟踪伺服调速系统的研制
2023-08-21 08:44杨国文
科技创新与应用 2023年23期
刘 涛,李 乐,杨国文
(中国电子科技集团公司第二十七研究所,郑州 450047)
光电跟踪系统是一个集图像采集处理、伺服控制以及精密机械于一体的复杂设备。高精度光电引导系统要求伺服平台具有控制精度高、系统响应快和抗扰动能力强等特点。三环控制系统中,速度环是实现伺服系统性能的部件。伺服系统的最大速度,最大加速度性能指标能否实现,取决于速度环的性能。调速范围也是速度环的一个重要指标,只有速度系统有宽广的调速范围,伺服系统才有从高速到低速的平稳运转,伺服系统的低速跟踪性能也取决于速度环的调速范围[1-2]。
因此,设计一个高精度、快速伺服系统,必须设计一个性能优良的速度环路。
1 伺服控制系统框图
控制系统应该包括给定环节、比较器、控制器、执行机构、被控对象和反馈环节,系统结构框图如图1所示[3]。

图1 伺服控制系统的基本构成
2 双闭环调速系统的仿真
根据伺服控制系统的基本构成,可以画出双闭环调速系统的动态结构框图如图2 所示。
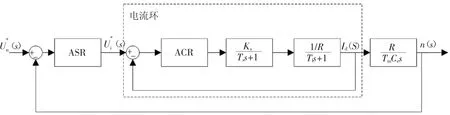
图2 双闭环调速系统的动态结构图
图2 中各参数的意义:ASR 为速度环调节器,ACR为电流环调节器,KS为晶闸管放大系数,TS为晶闸管失控时间,Tl为电枢回路时间常数,Tm为机电时间常数,Ce为电动势转速比。
本文主要研究速度环路的控制规律和设计方法,为了简化系统,将电流环与电机看作一个整体处理,如图2 中虚线框所示。一般多按Ⅰ型系统来设计电流环,电流环的控制对象是一个双惯性单元,为将系统校正成Ⅰ型系统,应采用PI 调节器,其传递函数可以写成
式中:Ki为电流调节器的比例系数;τi为电流调节器的时间常数。
当选取τi=Tl时,调节器的零点对消掉控制对象的大时间常数极点,此时系统被校正为Ⅰ型系统。闭环后,其传递函数可以近似处理为
上式可以得出,电流环闭环后,可以将其等效为一个小时间常数的一阶惯性系统。
1.1 连续伺服系统仿真
传统的模拟速度环可以看作一个连续系统,经过上文等效处理后,原调速系统可以简化为图3。

图3 调速系统的等效动态结构图
通常速度环应该校正为Ⅱ型系统,由图3 可知,速度环控制的系统包含一个惯性环节和一个积分环节。因此,ASR 应选择PI 调节器
式中:Kn为转速调节器的比例系数;τn为转速调节器的时间常数。
调节器参数的取值,需要根据系统对于动态性能的要求来决定。
2.2 离散伺服系统仿真
本文所设计的数字速度环,其给定环节、控制环节和反馈环节均为数字信号,故系统可看作一个离散系统。系统框图如图4 所示。
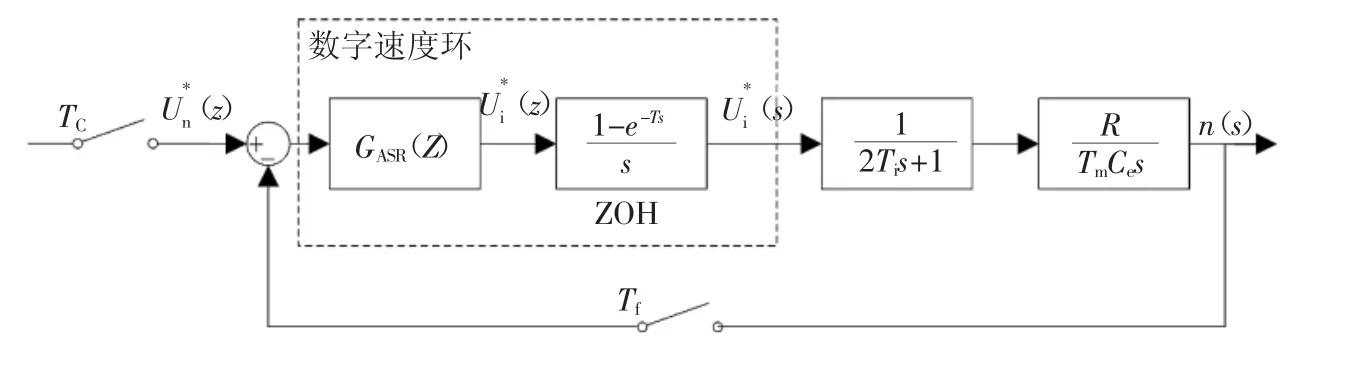
图4 离散调速系统的动态结构图
图4 中Tc为指令给定的时间周期,Tf为速度反馈信号的采样周期,T 为数字速度环的控制周期,GASR(Z)为GASR(S)传递函数的离散化。
取Tc=0.02 s,T=0.005 s,指令给定为幅值为5 的阶跃信号,Tf分别取0.005 s 和0.000 5 s 进行仿真,并与连续系统仿真结果进行对比。结果如图5 和6 所示。

图5 Tc=0.005 s 时系统控制效果对比
当采样周期较长时,离散系统的控制效果明显差于连续系统,而当采样周期足够短时,由图6 分析可知,离散系统超调量略大于连续系统,二者控制效果相似。

图6 T=0.000 5 s 时系统控制效果对比
取Tf=0.000 5 s,调节器采用带积分限幅的PI 控制算法时,仿真结果如图7 所示。

图7 采用积分限幅系统控制效果对比
对比可知,采用了积分限幅PI 控制算法后,离散调速系统的超调量和调节时间明显优于传统的连续调速系统。
3 数字速度环设计
本文所设计的伺服控制系统:给定环节为上位机发送数字命令;控制器选用FPGA 芯片进行PI 控制及接口控制[4],数模转换器采用高精度D/A 转换芯片;被控对象为高精度伺服转台;反馈环节为高精度数字光纤陀螺仪。系统结构框图如图8 所示。
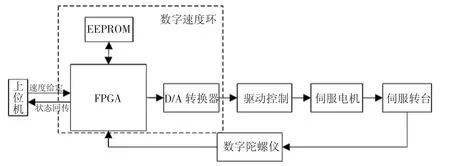
图8 伺服控制系统结构框图
3.1 硬件设计
本系统所采用的FPGA 芯片为ALTERA 公司生产的Cyclone Ⅳ系列,该系列芯片特点有低功耗,丰富的逻辑单元和片上存储空间,多达56 个内置乘法器和81 个用户I/O 引脚。可以满足高精度伺服系统的控制要求,并且具有很好的扩展性。
D/A 转换器则采用了AD 公司的AD7836 芯片,该芯片集成了4 个14 位DAC,采用±5 V 基准电压,输出电压满量程范围为±10 V。接收到新数据时,DAC 输出会独立更新。
EEPROM 芯片采用了Microchip 的24LC04,用于存储PI 控制器的控制参数,同时便于在线通过串口修改PI 参数。
3.2 软件设计
根据系统所需要实现的功能,设计出FPGA 原理图,其结构如图9 所示。首先编写出串口数据接收模块,再根据速度环与上位机的协议、数字陀螺仪的协议分别解算出速度给定和当前转台速度反馈并发送给PI控制算法模块,PI 模块根据速度给定和反馈采用带积分限幅的分段积分PI 控制,将计算出的电压值通过D/A 控制模块发送给AD7836 进行数模转换,得到的模拟电压作为速度环输出[5-6]。

图9 FPGA 原理图
4 实验结果
以本文所设计的数字调速系统控制高精度光电跟踪伺服平台,选取合适的比例和积分控制参数,由上位机发送速度值为50°/s 的阶跃信号,使伺服转台由静止状态快速达到目标速度并且保持稳态,实验所得数据如图10 所示。

图10 高精度伺服平台阶跃响应
图10 中纵坐标为转台转速,横坐标为陀螺反馈数据帧数,每一帧发送周期为0.005 s。分析可得
调节时间:ts=10.5 ms。
通过实验数据可以得出,本文设计的数字调速系统具有低超调和响应迅速的优点。系统达到稳态值后,闭环精度高达0.56%,控制性能相较于模拟调速系统有较大提升,可以满足高精度光电跟踪系统的控制要求。
5 结束语
本文从双闭环调速系统入手,建立了连续和离散系统的数学模型,并进行仿真分析。在此基础上,设计了基于FPGA 芯片和D/A 转换器的数字调速系统。在控制方法上采用了带积分限幅的分段积分PI 控制,实验证明控制效果优良。该系统已经运用于某型号舰载起降综合电视监视系统。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
汽车维修技师(2019年7期)2020-01-16
重型机械(2019年3期)2019-08-27
测控技术(2018年12期)2018-11-25
汽车维修技师(2018年11期)2018-05-11
中学生数理化·高一版(2017年1期)2017-04-25
北京航空航天大学学报(2016年4期)2016-02-27
弹箭与制导学报(2015年1期)2015-03-11
新高考·高一物理(2014年4期)2014-09-17
物探化探计算技术(2014年1期)2014-06-27