分布式电动汽车横向稳定性控制研究
2023-08-21 08:44郑凯,徐皓
科技创新与应用 2023年23期
郑 凯,徐 皓
(中国汽车工程研究院股份有限公司,重庆 401147)
分布式独立驱动电动汽车采用轮毂电机直接驱动车轮,省去了变速器、传动轴、差速器等机械部件,减小了整备质量,提高了传动效率。因此,该结构在电动汽车和混合动力汽车上得到了广泛的应用。由于每个车轮由轮毂电机独立驱动,为了保证车辆沿着规定的路径行驶并具有一定的稳定性,必须设计一个协调各个电机的控制系统。
为了实现对驱动电机的精准调控,国内外研究人员做了大量的研究。文献[1-4]根据神经网络设计了分布式独立驱动电动汽车稳定性模糊横摆角速度控制器和独立的车轮滑移控制器。该方法采用模糊逻辑控制器确定期望的转向角,通过滑模控制器驱动直流电动机,在正常行驶条件下具有较好的效果。文献[5]根据模糊控制方法对驱动电机进行控制,实现了对某款混合动力汽车的横向稳定性控制。
文献[6]提出了一种结合线性二次控制方法和李雅普诺夫函数的混合容错控制器,能够实现对车辆的路径跟踪控制。文献[7]针对驱动车辆的非线性系统,根据滑模控制理论对电机进行分组控制,可以提高车辆的行驶稳定性。文献[8-10]采用无线射频识别技术(RFID)考虑了驱动电机执行时的故障问题,并通过重新分配非故障电机的转矩,实现容错控制,提高了控制系统的可靠性。
综上所述,目前针对车辆的稳定性控制的研究日益得到重视,而针对分布式独立驱动车辆的横向稳定性控制的研究相对较少。在正常的行驶工况下,这些方法可以很好地保持车辆的稳定性,但在低附着路面、转向角变化过大及其他极限工况下,车辆处于失稳状态,存在一定的隐患和失控风险。如何基于分布式独立驱动车辆的结构特性,提高该类型车辆的横向稳定性,并兼顾控制的最优性和实时性,还有待于进一步探讨。
为此,本文中分布式独立驱动车辆(DEV)为研究对象,基于其驱动特性提出了一种新的滑模控制方法,与经典滑模控制方法相比,该方法具有速度快、稳态和瞬态响应好等优点,可以提高车辆的稳定性及工作可靠性。在此基础上,设计了分布式独立驱动车辆的横向稳定控制系统,该系统由高、中、低三级控制层组成,可以实现对低附着路面的横向稳定性控制,具有一定的实际应用价值。
1 系统建模
1.1 车辆动力学模型
如图1 所示,忽略俯仰和侧倾运动,考虑横向、纵向、横摆3 个方向的自由度,有以下的动力学方程[8]

图1 车辆动力学模型
式(1)可以改写为如下的状态方程式
式中:Bx和By分别为
1.2 载荷传递模型
在车辆加速、制动和转弯工况下,车辆的簧载质量会发生载荷转移,包括纵向载荷转移和横向载荷转移,这些会引起施加在轮毂上的力发生变化,这对车辆的稳定性有较大影响,为了保证控制的有效性,必须对其进行计算[9]。
总轮胎载荷可由下式进行计算[10-11]
选择车身侧偏角β 和横摆角γ 作为状态变量,车辆的状态空间可以表示为如下[12]
式中:Mz为直接横摆力矩。
2 驱动控制算法
驱动控制算法由1 个高层控制器、1 个中层控制器和1 个低层控制器3 部分组成。高层控制器用于确定车辆的纵向参考车速和参考横摆角速度信号,即根据驾驶员的输入、传感器信号和行驶条件计算出理想的车辆动力学状态。中层控制器通过计算横摆力矩输入和驱动力输入跟随车辆的期望动力学行驶。此外,在该控制层中提出了一种新的滑模控制方法,与经典的滑模控制相比,该滑模控制方法具有更强的鲁棒性和更快的响应速度,并且在稳态条件下的振荡较小。低层控制器可以计算得到前后轮驱动电机的扭矩,并且通过最小化代价函数的方法实现对驱动电机的扭矩合理分配。
2.1 高层控制器
在不降低车辆的加速度、爬坡能力和最大巡航速度等性能的前提下,保证车辆的稳定性是设计分布式独立驱动车辆控制器的关键。以车辆的纵向速度表征前述的车辆性能,车辆的纵向参考速度计算如下所示
式中:axdem为车辆期望的加速度;Vx0为车辆的初始速度。
在低附着地面如冰雪路面、湿滑路面等行驶路况下,过高的车辆速度可能会产生失稳的危险,为此,本文提出了一种新的纵向参考速度的生成方法。该方法考虑了驾驶员的驾驶需求及车辆的行驶工况,可以保证车辆在低附着路面行驶时的安全稳定。
该方法将车身侧偏角β 与目标值βwitress进行比较,目标值定义为在单位摩擦系数(μ=1)的路面行驶时的车身侧偏角,βwitress由一个神经网络观测器在线生成,该观测器针对不同的行驶周期可以进行调整。该神经网络观测器[13]的输入包括前轮转向角、横摆角速度信号和车速信号。Δβ 定义为车身侧偏角β 和βwitress之间的差值。车辆所需的加速度和Δβ 应用于模糊控制器作为输入,从而得到加速度的参考值axref。最后,通过对加速度参考值进行积分计算出相应的纵向参考速度。
另一个重要的状态量是横摆角速度参考值γref,由方向盘转角δsw和车辆纵向速度可计算出相应的横摆角速度参考值,表1 为计算横摆角速度参考值γref所涉及的参数,其计算表达式如下所示[8]

表1 计算参考横摆角速度的参数
2.2 中层控制器
在中层控制器可以计算车辆所需的牵引力输入(Fxdes)和横摆力矩输入(Mzdes)以跟踪期望的动力学状态行驶。因此,该中层控制器主要由速度控制器和横摆角速度控制器2 部分组成[14]。
2.2.1 速度控制器设计
在速度控制器中,滑动面可以定义为下式
驱动力计算如下[15]
2.2.2 横摆角速度控制器设计
在横摆加速度控制器中,滑动面定义为
横摆力矩计算如下
为了有较小的振荡,一般可以用正切函数代替符号函数[16]。
2.3 低层控制器
低层控制器可以获取实际的驱动命令,即前后车轮的电机驱动扭矩。假设车辆同一侧的前后轮控制力矩对纵向速度和横摆角速度的影响相同,则车辆一侧的驱动力可以基于车轮中心的载荷比例进行分配。由此可以得到如下表达式[17]
系统的代价函数定义为
式中:Fmax为各车轮内电机可能产生的最大驱动力;w1和w2为权重系数,本文中w1和w2设置为1。
因此,在正常驱动条件下,通过求解如下方程,可以得到车轮驱动力的分配情况
3 仿真结果及分析
在Carsim/Simulink 环境下,在分布式独立驱动车辆上对该控制系统进行了仿真。针对2 种不同的驾驶条件,包括加速期间的单车道变换和八字形车道进行了仿真分析。通过比较经典滑模控制方法、文献[17]提出的控制方法及本文设计的控制器,验证了本文所提出控制方法的优越性。针对横摆速度不受控制的状态(当所提出的控制器中的w2为0 时)进行了仿真分析,通过仿真验证了所提出的控制器在湿滑路面上的性能,并且考虑了道路摩擦突然变化的情况。
3.1 加速时改变车道
如图2 所示,比较了经典滑模控制器、文献[17]提出的控制器及本文设计的控制器三者的车速控制精度,14.9 s 和15.4 s 为局部放大速度曲线。经过综合比较可以得知,本文所提出的控制器是一种精确度和鲁棒性较好的速度跟踪控制系统。
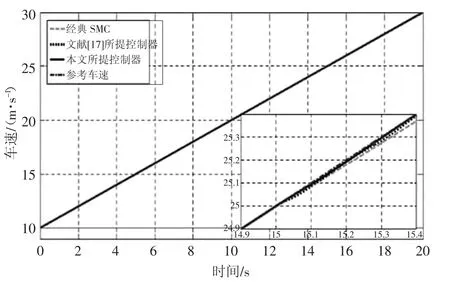
图2 单车道纵向速度变化
图3 为本文所提出的控制器、经典滑模控制器、无横摆控制(仅控制速度)及文献[17]提出控制器的参考和仿真横摆角速度曲线。从这些结果中可以看出本文所设计的控制器可以精确稳定的运行。14.8~16.5 s 的局部放大曲线如图4 所示,从图4 可以看出,所提出的控制器降低了稳态误差。

图3 4 种控制方案的横摆角速度变化

图4 14.8~16.5 s 的横摆角速度局部放大曲线
3.2 八字形车道仿真
该仿真工况设置为车速在10 s 内从10 m/s 线性提高到19.44 m/s(70 km/h),直到时间t=35 s 结束加速,路面摩擦系数为0.75。由图5 可以看出所提出的该控制器能够很好地跟踪参考速度,由9.8~10.7 s 的局部放大速度曲线可知,相比其他几种控制方案,本文所提出的控制器具有更好的稳态和瞬态响应特性。

图5 八字形车道行驶时的车速变化
4 结论
基于分布式独立驱动车辆的动力学特性分析与辨识,采用滑模控制的方法,设计了一种可以改善车辆横向稳定性的控制系统。设计对比控制器,在Carsim/Simulink 环境下进行仿真,验证了控制器的性能,得出如下结论。
1)仿真结果表明,与经典的滑模控制方法相比,本文提出的控制方法精确度更好、响应速度快并且具有更小的超调量。
2)设计了一种可以生成参考速度的3 层控制系统。该控制系统可以使车辆具有良好的横摆角速度及速度跟踪性能,从而提高了车辆在低附着路面行驶时的横向稳定性。
3)设计的3 层控制驱动系统,能通过最小化代价函数的方法实现对驱动电机的扭矩进行合理分配,从而提高了车辆的稳定性。仿真结果表明,该控制系统具有较强的鲁棒性,在低附着路面、转弯、路面摩擦系数突然变化等关键条件下,均能较好地保证车辆行驶稳定性。
猜你喜欢
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
能源(2017年10期)2017-12-20
中学生数理化·高一版(2017年3期)2017-07-08
能源(2017年5期)2017-07-06
火控雷达技术(2016年1期)2016-02-06
雷达与对抗(2015年3期)2015-12-09
中国铁道科学(2015年4期)2015-06-21
自动化博览(2014年12期)2014-02-28