某纯电动汽车制动踏板信号漂移现象分析及优化
2023-10-19 07:12吴苗苗侯海贵
汽车实用技术 2023年19期
吴苗苗,侯海贵,谢 斌,任 升
某纯电动汽车制动踏板信号漂移现象分析及优化
吴苗苗1,侯海贵1,谢 斌2,任 升2
(1.陕西汽车集团有限责任公司 技术中心,陕西 西安 710200; 2.陕西德创数字工业智能科技有限公司,陕西 西安 710200)
制动踏板模拟信号对纯电动汽车制动能量回收功能及行车制动功能的正常实现具有直接影响。由于车辆在行驶过程中受装配一致性、运行交变负荷、道路震动等因素影响,制动踏板顶杆的长度会发生变化,从而引起制动踏板顶杆行程变化,导致制动踏板模拟信号数值异常。结合某纯电动汽车制动踏板信号漂移现象展开研究,从机械结构和电气连接两个方面阐述了导致制动踏板模拟信号漂移的原因和两种基本解决措施,即通过精确调整顶杆螺母固定位置,从而改变制动踏板顶杆行程的方式,使得制动踏板模拟信号数值始终处于大于330的状态;更改整车控制器制动踏板模拟信号数值范围,使得制动踏板模拟信号数值处于该范围之内。该研究解决了纯电动车辆制动踏板模拟信号漂移问题,为同类结构车辆制动踏板信号漂移问题的解决提供了参考。
纯电动汽车;制动踏板;信号漂移;制动踏板顶杆行程;顶杆螺母
随着“双碳”战略的逐步推进,我国新能源汽车产业规模持续扩大,其中纯电动汽车的产销量和保有量更是增长迅猛[1]。根据中国汽车工业协会统计,中国新能源汽车产量连续8年位于世界第一,2022年销售688.7万辆,市场占有率突破25.6%[2],逐步进入全面市场化拓展期,已迎来新的发展和增长阶段。新能源汽车的经济性、动力性、可靠性等产品关键性能指标也进入充分竞争阶段。
电动汽车制动踏板信号是整车控制系统的重要输入信号之一,车辆制动、制动能量回收等功能的正常实现均需其作为输入的判定条件[3]。在现有技术条件下,车辆通过获取制动踏板位置信号电压,判断制动踏板信号是否处于预设区间内,若制动踏板信号电压处于预设区间内,则判定制动踏板信号正常;若制动踏板信号电压处于预设区间外,则判定制动踏板信号异常。但是,由于车辆制动踏板老化、信号漂移等因素影响,使得制动踏板位置信号电压处于预设区间外,从而影响车辆制动能量回收等功能的实现,甚至威胁行车安全[4]。本文选取某型纯电动汽车,针对其出现的制动踏板信号漂移问题从机械结构和电器控制两个方面进行深入分析研究,并提出有效解决方案。
1 问题提出
某型纯电动汽车正常行驶过程中,仪表突然显示制动踏板模拟信号采集故障,造成车辆制动能量回收功能失效,但不影响车辆正常行驶。据此,本次测试选取16辆该型纯电动汽车进行故障原因分析,汽车制动踏板信号参数如表1所示。该制动踏板总成具有两路信号输出,一路为踏板开关信号,用于反馈踏板是否踩下,踏板踩下后反馈高电平,踏板松开后反馈低电平;一路为模拟信号,用于反馈踏板开度及其变化速率。制动能量回收功能主要采集模拟信号,基于市场问题(由模拟信号一路反馈)进行现象分析。
测试制动踏板模拟信号时,首先将安装有CAN-APE(Controller Area Network-Analyses of Phylogenetics and Evolution)软件的制动踏板模拟数据采集仪器通过特定接口与整车控制器相连接。连接完成后,运行数据采集仪器自带软件,与整车控制器进行相互通信。通信建立完成后,踩踏制动踏板即可获取制动踏板模拟信号,图1为车辆制动踏板模拟信号测量幅值图。
表1 制动踏板信号参数
名称参数值 正常电压/V0.4~0.6 正常模拟信号值360~420 额定工作电压/V24±0.1 正常使用温度/℃-40~+80 防护等级IP65

图1 制动踏板模拟信号测量幅值图
2 现象分析与优化
2.1 现象分析
从影响模拟信号因素的角度考虑,现象分析需排查踏板顶杆行程,制动踏板顶杆行程信号由制动脚阀感知采集,而气制动总阀是行车制动系统最主要的关键部件,也是行车制动时的第一个制动部件[5]。该车型脚制动阀工作原理为当驾驶员踩下制动踏板时,制动踏板顶杆将制动阀平衡弹簧上座下压,经过平衡弹簧、下座和钢球,通过推杆及钢球压下平衡臂,推动两腔膜片总成下移。间隙消除后,先关闭排气阀口,再打开进气阀口,贮气筒内的压缩空气经制动阀进入各制动气室,推杆推动调整臂使凸轮转动,制动蹄压向制动鼓,产生制动作用,其结构简图如图2所示。纯电动汽车在行驶过程中由于装配一致性、运行交变负荷、道路震动等因素的影响,制动踏板顶杆的长度会发生变化,从而引起制动踏板顶杆行程变化,导致制动踏板模拟信号数值异常。

图2 制动踏板总成结构简图
制动踏板顶杆螺母的固定位置决定了顶杆行程的长短,并直接影响整车控制器程序中制动踏板初始信号采样值。通过调整制动踏板顶杆螺母固定位置,改变顶杆行程长短的方式,调节踏板模拟信号数值。
16辆纯电动汽车出厂时,整车控制器程序设置制动踏板初始信号电压正常范围为0.4~0.6 V,对应制动踏板模拟信号数值为360~420,如图3所示。当制动踏板模拟信号数值小于330时,整车控制器判断为车辆制动踏板故障,并提醒驾驶员。
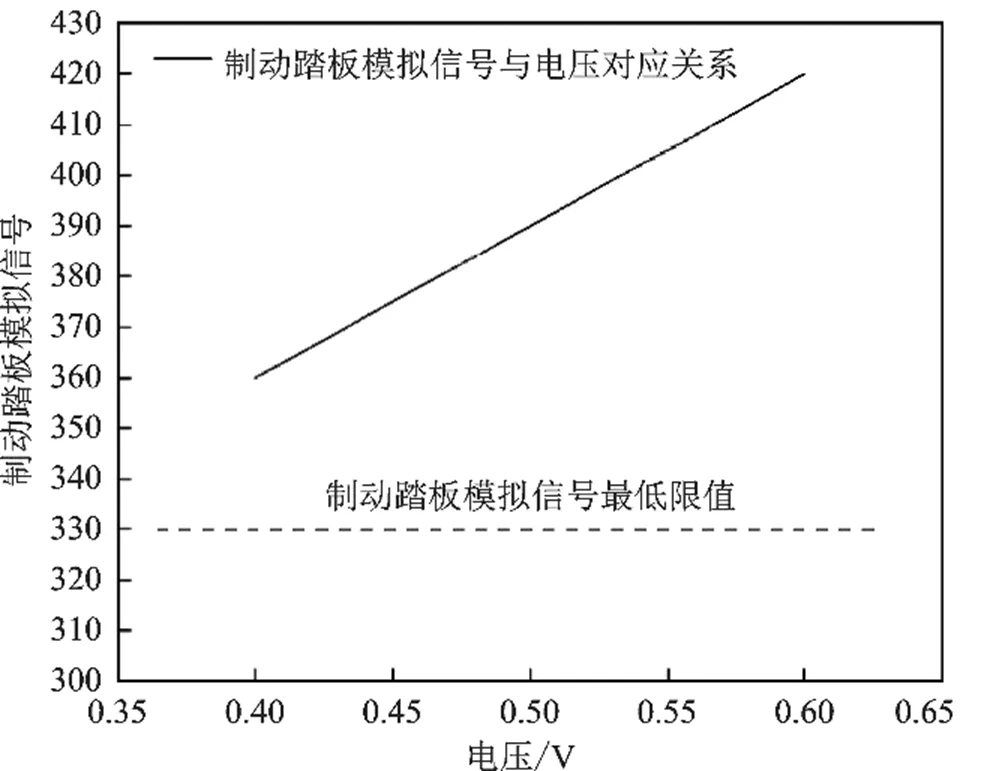
图3 制动踏板模拟信号数值与电压对应关系
表2为16辆某型纯电动汽车制动踏板初始信号数据与测试数据对比。由表2可知,每辆车制动踏板初始信号测量值均在不同程度上产生了漂移,其中13辆车向下漂移,最大漂移值为-25;3辆车向上漂移,最大漂移值为30。序号为1的车辆虽然其测量值高于初始值,但车辆长期行驶过程中会不可避免地出现震动或者颠簸,导致制动踏板顶杆螺母松动,使得制动踏板顶杆行程改变,导致制动踏板模拟信号数值低于330,从而使得整车控制器判断为制动踏板故障。此外,部分车辆制动踏板信号测量数值接近判断值330,后期也存在整车控制器判断为制动踏板故障的风险。综上所述,车辆经过一段时间的运行后,制动踏板和顶杆配合的行程产生了变化,导致制动踏板初始信号产生漂移。
表2 制动踏板模拟信号测量值与初始值对比
序号制动踏板信号测量值制动踏板信号初始值差值 1335360-25 2390415-25 3355380-25 4357360-3 5363375-12 6351365-14 7343360-17 8378383-5 93863833 103833758 11362373-11 1244041030 13389400-11 14407420-13 15385410-25 16371375-4
2.2 优化方案
经过上述分析,优化纯电动车制动踏板模拟信号漂移现象的方案共有两种:1)通过精确调整顶杆螺母固定位置,从而改变制动踏板顶杆行程的方式,使得制动踏板模拟信号数值始终处于大于330的状态;2)更改整车控制器制动踏板模拟信号数值范围,使得制动踏板模拟信号数值处于该范围之内。由于车辆已出厂,通过精确调整制动踏板顶杆螺母位置解决该问题的方式不仅操作空间有限,而且精准调整制动踏板顶杆长度难度较大,因此,选择通过修改整车控制器控制程序的方式来解决该问题。
通过对表2的数据进行分析可以得出,应将制动踏板模拟信号数值的下限值和上限值分别减少25和增加30,且同时应适当减小整车控制器判定制动踏板故障的模拟信号数值限值。由于车辆在后续的运行中,制动踏板顶杆行程和顶杆螺母位置仍会出现变化,因此,在更改制动踏板模拟信号数值范围时,应将该范围扩大一些。综合考虑各种情况,将制动踏板模拟信号数值的下限值和上限值分别调整为310和460,同时将整车控制器判定制动踏板故障的模拟信号数值限值调整为280。将更改后的程序重新写入整车控制器后,制动踏板故障消失。
3 结语
制动踏板是车辆制动系统最重要的部件之一,其信号的正常与否直接影响着车辆制动系统是否能够正常稳定工作。本文所研究的制动踏板模拟信号数值漂移现象是纯电动汽车制动系统中经常出现的问题之一,该问题不会影响正常行车安全,但会导致纯电动车制动能量回收功能失效,影响产品性能的市场表现。对于已运行车辆,通过更改整车控制器程序中制动踏板模拟信号的限值范围,成功解决了制动踏板信号模拟信号数值漂移的现象。此外,汽车生产厂家应该增加制动踏板与制动总阀安装力矩、间隙等的一致性检查,明确安装规范要求,提高零部件装配质量,可有效避免此类问题的出现。
[1] 唐进.我国新能源汽车产业发展现状及发展趋势的研究[J].数值化用户,2018(29):228.
[2] 中国汽车工业协会.我国2022年汽车出口突破300万辆,产销连续14年稳居全球第一:乘势而上,汽车产业马力足[DB/OL].(2023-01-17)[2023-02-25].https:// www.gov.cn/xinwen/2023-01/17/content_5737416.htm?eqid=86cb5f7f0009fef8000000046458503e&wd=&eqid=8b266bd90001daa300000002648e9ee2.
[3] 陈燕,贝绍轶,汪伟,等.基于EMB与EBD的电动汽车制动能量回收系统研究[J].现代制造工程,2016(12): 62-66.
[4] 朱明,张君鸿,马成杰,等.混合动力汽车制动踏板位移传感器的故障诊断[J].汽车电器,2011(4):31-33,35.
[5] 杨春生,隋良红,陈正龙.客车气制动总阀性能检测系统的研究与设计[J].组合机床与自动化加工技术, 2013(12):94-97.
Analysis and Optimize on the Phenomenon of Brake Pedal Signal Drift in the Pure Electric Vehicles
WU Miaomiao1, HOU Haigui1, XIE Bin2, REN Sheng2
( 1.Technology Center of Shaanxi Automobile Group Company Limited, Xi'an 710200, China; 2.Shaanxi Dechuangshuzi Intelligent Technology Company Limited, Xi'an 710200, China )
The analog signal of the brake pedal has a direct influence on the normal realization of the regenerative braking energy function and the service braking function of electric vehicles. Due to influence of factors as assembly consistency, driving stress alternation and road vibrations etc., the length of the brake pedal ejector pin changes, causing the ejector pin’s stroke to change, resulting in an unusual figure in the brake pedal analog signal value. This paper explains the reasons for the drift of the brake pedal analog signal for electric vehicles from two aspects of mechanical structure and electrical connection. That is, by accurately adjusting the fixed position of the top rod nut, the analog signal value of the brake pedal is always greater than 330; Changing the numerical range of the analog signal value of the vehicle controller is within this range. The study solves the problem of the electric vehicles brake pedal analog signal drift by changing the program of the vehicle control units.
Pure electric vehicles; Brake pedal; Signal drift; Brake pedal ejector stroke; Ejector nut
U469.72
A
1671-7988(2023)19-30-04
10.16638/j.cnki.1671-7988.2023.019.006
吴苗苗(1988-),女,硕士,工程师,研究方向为新能源整车开发,E-mail:709038324@qq.com。
猜你喜欢
车主之友(2022年6期)2023-01-30
中国特种设备安全(2021年5期)2021-11-06
模具技术(2021年5期)2021-10-13
锻造与冲压(2020年13期)2020-07-09
黄河之声(2019年23期)2019-12-17
汽车实用技术(2019年17期)2019-09-21
电子制作(2019年7期)2019-04-25
电子测试(2018年14期)2018-09-26
电子制作(2017年24期)2017-02-02
黄河之声(2017年13期)2017-01-28