基于平均极值包络线的地下管线去噪算法
2023-10-27 06:27邹佳丽李志猛阎少宏张俊卿
华北理工大学学报(自然科学版) 2023年4期
邹佳丽,李志猛,阎少宏,张俊卿
(1. 华北理工大学 理学院,河北 唐山 063210;2.华北理工大学河北省数据科学与应用重点实验室,河北 唐山 063210;3. 华北理工大学唐山市数据科学重点实验室,河北 唐山 063210;4. 唐山市中宇科技发展有限公司,河北 唐山 063000)
引言
随着社会经济的发展,政府不断加大投资基础设施建设力度。地下管道作为基础设施之一,广泛用于给水、排水、燃气、电缆(电力、电信、有线电视等)、工业管道等方面,已成为现代工业生产和城镇生活的大动脉。随着城市地下管线长度和数量的增长以及受外力、自然环境和自身系统等因素的破坏,致使地下管线事故频发。如福建东山县城乡污水收集系统工程事故,KC-13天然气管线项目6·15事故,济南95·1·3事故等。地下管线作为城市的生命线,对其定期检测是确保城市安全的重要基础。管道检测中最重要的一项是计算管道的曲率,管道曲率刻划了管道在一点邻近的弯曲程度,可以将获得的管道曲率半径与国家规范中的倍D数[1](管道口直径的倍数)比较判定管道是否可以正常使用。在计算曲率前,需要测量管道以获得管道位置信息,位置信息的真实性决定管道安全检测的有效性。在测量管道位置的过程中,采用开挖技术不但需要花费大量的劳力物力,而且在一定程度上会对其他地下设施造成破坏。近年来,非接触式测量技术逐渐成熟,其中管道三维姿态测量仪在管道测量中应用广泛。管道三维姿态测量仪(俗称管线陀螺仪)内置惯性测量单元(IMU)、里程计和数据记录仪,在被测管道中穿行而过,测量和记录载体的三轴角速度、加速度及前进/后退距离。在给定起、终点三维坐标的情况下,对IMU、里程计和坐标点等多源数据进行融合,解算管线仪的运动轨迹,从而推算出管道中心母线的三维位置坐标和姿态,即可获得管道的位置信息。
实验所用数据由三维姿态测量仪测量获得。在测量过程中,由于受采集设备本身的硬件缺陷、管道内部环境(锈垢、结蜡、凹陷、焊缝)以及人为干扰等因素的影响,导致实测数据中含有大量噪声。在对地下管线拟合时,虽然拟合方法可以降噪,但降噪效果有限。为了在非开挖条件下获取较为真实的地下管道信息,需要对测量数据进行去噪处理。因此,探索一种有效的三维离散曲线去噪方法是管道安全检测的重要工作。
早期的曲线去噪一般是参考信号处理中的去噪方法,将空域转换为频域,通过筛选高频信号达到去噪效果。如Mokhtarian等[2]将高斯函数与信号进行卷积,再将其结果转换为空间域上的点,作为滤波后的顶点,但这种方法会产生收缩现象,无法保持数据原貌,造成数据失真。Choi等[3]提出一种差分光顺算法,通过计算数据点的二阶差分和四阶差分达到去噪效果;随后Cho等[4]将原始曲线采用不同的方法延伸得到反射填补曲线和镜面延伸曲线,其中反向填补曲线的偶数阶差分光顺与离散傅里叶滤波等价,并给予了证明。Jones等[5]将图像双边滤波方法拓展到几何去噪中,可有效保持数据的尖锐特征。任庆军等[6]提出一种基于内部表示的空间曲线去噪方法,根据边向量与坐标轴的夹角进行双边滤波,再将滤波后的角度转换为代替原点的新顶点,该算法对抵御曲线收缩现象有一定效果。周财进[7]将经验模态分解(Empirical Mode Function,简称EMD)算法应用到二维封闭曲线去噪中,改进了EMD算法只能处理单一几何属性的问题,提出一种根据曲率直接对曲线整体进行去噪处理的算法。随着测量技术的高速发展,三维去噪方法越来越受到人们关注。Alexa等[8]利用移动最小二乘法平滑点云曲面,但无法保持数据原貌,造成图像失真;为解决此问题,?倝ztirel等[9]提出采用基于鲁棒的隐式最小二乘来设计算法,取得了良好效果。朱志华等[10]将均值滤波和中值滤波拓展到三维曲面的点云数据检测中,并与曲率滤波加权融合,其去噪效果优于任意一种单独的滤波算法。除以上直接对点云坐标进行去噪外,国内外学者还提出一些基于法向的去噪方法[11],其中最经典的是主成分分析法,并在此基础上提出一些变种,以提高其鲁棒性。Li和Zhang 等学者[13-15]选择与平面更接近的局部点集来计算法向,此方法在保持几何特征方面取得了不错的效果。QI,Zhou和Ben-Shabat等[16]开展了一系列基于深度学习的法向估计研究,将其应用于点云去噪,效果显著。
近年来,曲线去噪算法的提出多是基于二维空间。而三维空间的曲线去噪算法中,以曲面的三维点云去噪算法研究居多,鲜少有针对三维离散曲线的去噪算法研究。目前,针对三维数据点去噪大多采用滤波方法[7],该研究将常见的滤波方法拓展到三维离散曲线中,并提出一种通过提取曲线局部极值点,计算极值包络线的均值以达到降噪效果的滤波算法。实验讨论了不同参数化方法对该算法性能的影响,并设计了对比实验,结果表明该算法能够有效保持数据特征,且对三维离散曲线去噪效果显著。
1 地下管线数据采集设备
针对非开挖顶管施工的管道线路测量,常规电磁类管线仪、探地雷达等仪器因受电磁干扰、管道材质、管道下埋深度等诸多因素的局限,易导致测量失败或者测量间断,无法获得完整的管道三维姿态轨迹,施工效率低,特别是在过河管道的测量应用中,仪器错误率急速增加。实验数据由市面上新研发的管道三维姿态测量仪(DT-GXY-300)测量获得。此仪器通过配置不同规格的行走支架,可测量内径70 mm及以上不同规格的圆形管道。仪器在牵引力作用下行走于管道中,并实时测量自身角速度、倾角、加速度等物理信息,联合管道两端的参考坐标可解算获得管道中心轨迹坐标,其坐标形式为表示水平方向的北坐标、东坐标和表示管道深度的高程,将北坐标方向记为x轴方向, 东坐标方向记为y轴方向, 高程方向记为z轴方向。
图1(a)所示为DT-GXY-300系列测量仪。其测量效率高,数据连续准确,不受电磁环境、管道材质、管道埋深等因素影响,是燃气、石化、电力、水务、通讯等行业在非开挖敷设管道位置与坐标测量中的首选设备。其拥有650 m的测量量程和PE90的最小适配管径,可以应用于80%以上的管道。图1(b)为管道三维姿态测量仪行走支架。其结构简单,可以自适应伸缩,三轮能够贴紧管壁,牵行阻力小,可以根据管道内径定制多种类型的支架。

图1 三维姿态测量仪
图2所示为管道内的环境,易出现锈垢、焊缝和凹陷,仪器在此种环境中运行,将会导致实测数据受到大量噪声影响,因此需要去噪处理。

图2 管道内部图
2 参数化
由于该研究是对三维离散曲线去噪,需要对数据点参数化处理。常见的参数化方法有均匀参数化、弦长参数化和向心参数化。
2.1 均匀参数化
均匀参数化是节点在参数轴上呈等距分布,常取成整数序列。
ti=i,(i=0,1,2,…,n)
(1)
该方法适用于数据点均匀分布的情况,否则会出现尖点或打圈自交现象。
2.2 弦长参数化
弦长参数化是根据数据点间的弦长确定节点,
(2)
其中|Δpk|表示向量Δpi-1的长度,Δpk=pk+1-pk为弦线矢量。该方法克服了均匀参数化无法处理数据点分布不均匀的情况。可以将其粗略地看成弧长参数化,所得曲线光顺性良好。
2.3 向心参数化
向心参数化是假设曲线向心力与曲线矢量从始端到末端的转角成正比,再与其他假设结合,
(3)
该方法是在均匀参数化和弦长参数化基础上的修正,其结果良好。
3 常见滤波方法的三维离散曲线去噪
3.1 均值滤波[10]
均值滤波的主要思想是局部平均噪声数据,将滤波窗口中点的平均值作为采样点的坐标值,并取代原始点,此方法平滑效果良好,但容易造成边缘失真。

(4)
其中N是滤波窗口D(xk,yk,zk)中点的个数,窗口越大去噪后的曲线越平滑,但同时也会丢失更多的细节信息,窗口的大小通常根据经验人为设定。
3.2 中值滤波[10]
中值滤波是选取滤波窗口的中值代替序列中心位置的值,对去除含噪声数据中的“毛刺”——尖锐特征,具有良好效果,但无法保持数据原貌。
对待处理的当前采样点,选择一个滤波窗口,此窗口由该采样点和相邻的N个数据点组成,对窗口内的点由小到大进行排序,取中值替代当前采样点的值。

(5)

4 研究算法
该算法是对含有噪声的三维离散曲线Q=[Q0,Q1,…,Qn]去噪,其中Qi=(xi,yi,zi),i=0,1,…,n,数据中的噪声表现为偏离其邻域数据点的尖锐特征,若直接去除会造成数据缺失,不利于后续算法的实现。因此,提出一种采用平均极值包络线平滑噪声的迭代算法。

(6)

(7)

(8)
最后,计算平均包络
(9)

(10)
计算极大和极小包络线为
(11)
(12)
逐点平均
(13)

(14)
多次实验表明,随着迭代次数的增加,数据毛刺逐渐减少,需要填充的极值点增加,由于填充的极值点是在前一次迭代的均值曲线上取点,因此极大包络线和极小包络线会逐渐与均值曲线重合,所以均值曲线与真实曲线的误差会随着迭代次数的增加单调递减并收敛。图3分别展示了使用该算法对实验数据迭代第一次、第二次和第十次的效果图。

图3 降噪步骤图

算法的主要计算步骤如下:
输入:含噪声数据集Q=[Q0,Q1,…,Qn],初始阈τ,ε,其中τ>2,ε>0。
输出:mk。
Step1.对离散曲线Q参数化处理.令m0=Q。
Step2.提取mk-1的极大值点集pk和极小值点集qk,令ρk=min(|pk|,|qk|)。
Step4.利用3次B样条分别插值pk和qk,得到极大包络线C(Tk)和极小包络线c(tk)。
5 实验验证
5.1 实验设备
实验环境:Intel(R) Core(TM) i5-6300HQ CPU @ 2.30GHz;8GB(内存);Windows 10家庭中文版64位操作系统;python编程。分别选择均值滤波和中值滤波2个典型的去噪算法与该研究算法进行对比。
5.2 实验数据集
分别选择圆柱螺旋线和实际管道测量数据来验证去噪算法的有效性。
数据1:该项研究选择半径为1、角速度为 ,线速度为1, 的圆柱螺旋曲线作为真实曲线。在真实曲线上非均匀选取400个点作为真实数据,将其添加均值为0,方差为0.02的高斯噪声作为含噪声的数据。
数据2:在上述真实曲线上非均匀选取2000个点作为真实数据,将其添加均值为0,方差为0.007的高斯噪声作为含噪声的数据。
数据3:通过管道三维姿态测量仪测量水平长为40.64 m的地下管道,共获得852个坐标点。
5.3 评估标准

5.4 实验结果
图4所示为采用不同参数化方法降噪后的误差分析图。
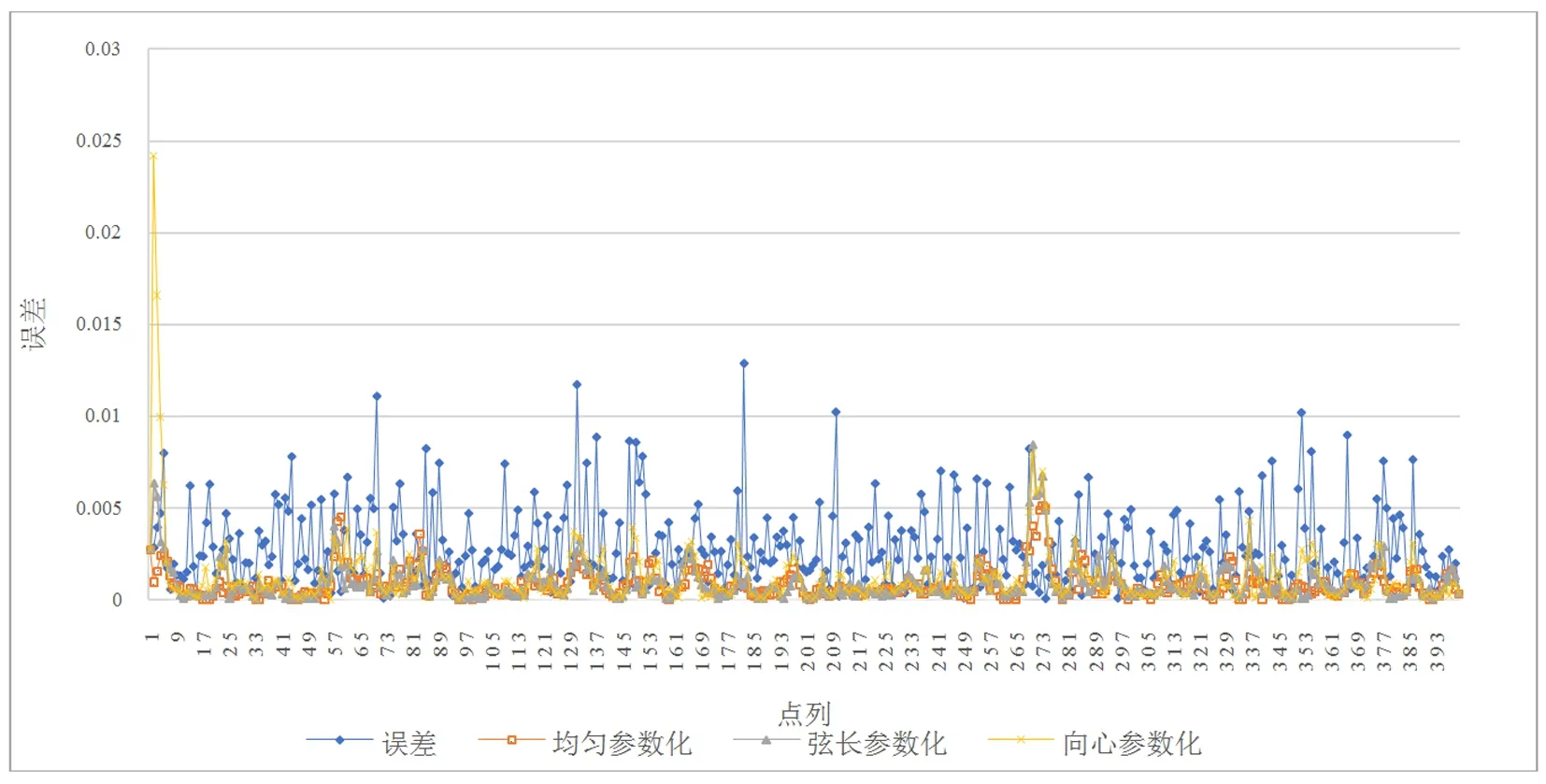
图4 3种参数化方法降噪后误差分析图
通过以上分析,对三维离散曲线去噪,该算法主要分为三步:首先按每个坐标分量分别提取并填充极值点,再通过B样条曲线插值极值点求解曲线的极大和极小包络线,最后逐点求包络线均值,通过迭代,可获得降噪后的三维曲线坐标。算法中共有2个自由参数τ、ε,在降噪过程中需要不断对其调节,以达到理想效果。为检测参数化方法对本文算法性能的影响,分别采用均匀参数化,弦长参数化,向心参数化对数据1进行去噪处理。
由图4可知,该项研究的算法可以有效降低三维离散曲线中的噪声,且参数化方法对该算法的降噪效果有一定影响。均匀参数化和向心参数化方法在整体上可以降低噪声,但个别点误差不降反增,降噪效果不稳定。因此,实验选用效果较为稳定的弦长参数化方法。为检测该算法的去噪效果,分别采用该算法和经典算法对数据2进行去噪处理。图5所示为螺旋曲线加噪前后效果图。图6为该项研究算法降噪前后效果图。
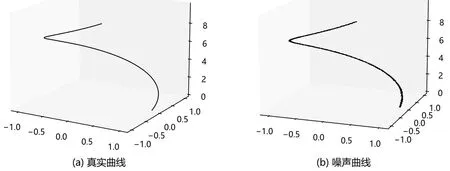
图5 螺旋曲线加噪前后效果图
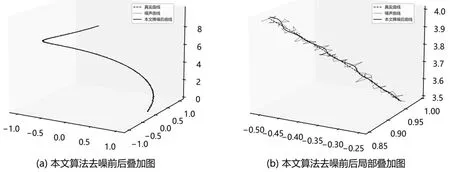
图6 该项研究算法降噪前后效果图
由图5可知,在螺旋曲线上添加高斯噪声,曲线出现尖端毛刺,在此曲线上取点,作为待去噪的数据点集。由图6可知,该算法基本上去除了数据中的尖端毛刺,去噪后曲线接近真实曲线,不会产生收缩现象。图7和图8所示为经典算法视觉效果图。表2所示为3种算法降噪前后的误差比。

图7 均值滤波去噪前后效果图
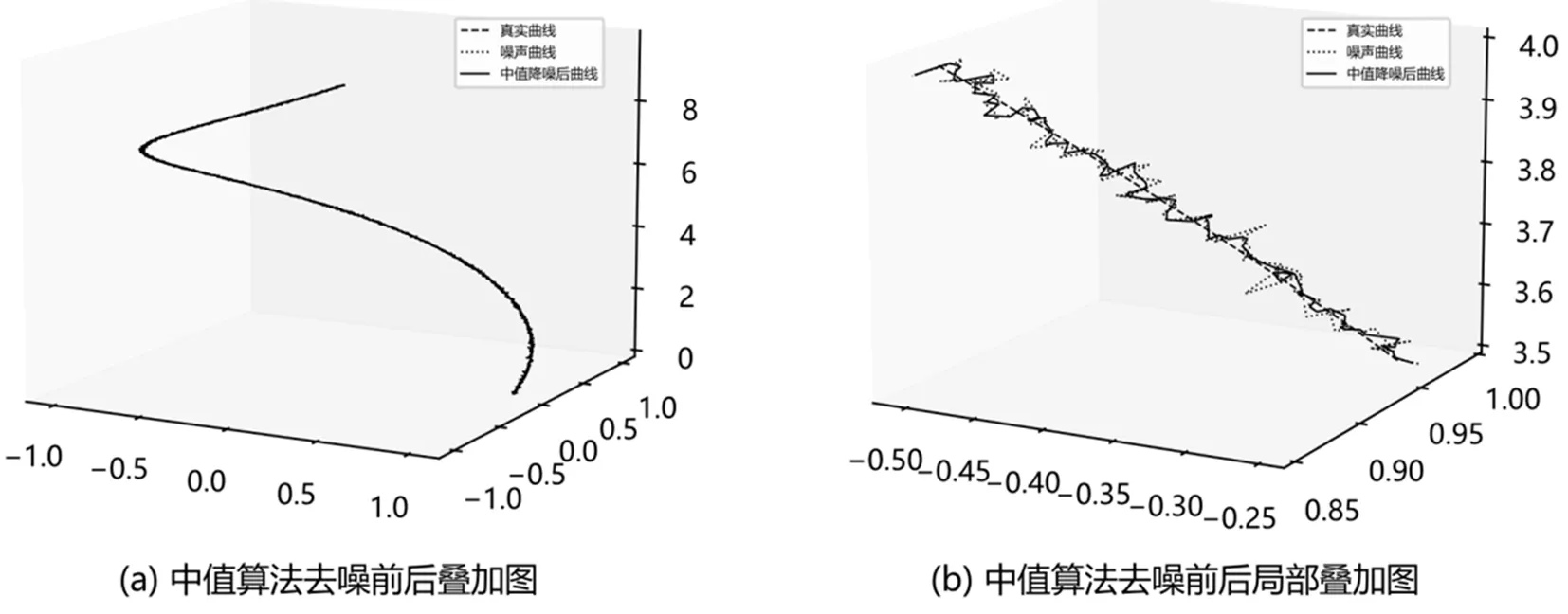
图8 中值滤波去噪前后效果图
通过该算法与经典算法的对比可以看出,均值滤波和中值滤波在降噪过程中存在收缩现象并且降噪后的曲线中仍然包含大量毛刺,曲线失真。而采用该算法降噪后的曲线与真实曲线相差无几,没有产生收缩现象。并且由表1可知,该项研究降噪效果远高于另外2种算法。因此,该项研究算法对三维离散曲线降噪效果显著。

表1 各算法误差统计
为检测算法的实用性,对地下管线数据3进行降噪处理。图9所示为迭代10次的降噪后效果展示图。可以看到降噪后曲线无尖端毛刺,符合地下管线模型特征。

图9 管线降噪效果展示图
6 结论
提出了一种采用三次B样条插值极值点计算极值包络线,再逐点求均值,通过迭代得到降噪后曲线的方法。因为该项研究的算法将曲线包含于极大和极小包络线中,所得曲线必在此范围内,所以本算法不会产生收缩现象。该算法有效改善了经典去噪算法中存在的无法保持数据原貌、数据偏移和曲线收缩问题,对离散曲线降噪效果显著,可将噪声降至27%,适用于多维曲线降噪。可以将本算法用于地下管线去噪中,为后续管道安全检测算法奠定基础。
猜你喜欢
中学数学研究(广东)(2019年21期)2019-12-16
新教育论坛(2019年35期)2019-09-10
现代机械(2018年1期)2018-04-17
石油化工建设(2017年2期)2017-06-05
电子制作(2017年10期)2017-04-18
电子制作(2017年9期)2017-04-17
上海金属(2015年4期)2015-11-29
空间控制技术与应用(2015年3期)2015-06-05
遥测遥控(2015年2期)2015-04-23
服装学报(2015年6期)2015-01-15