
基于经验模态分解的汽车轮速信号去噪算法
2023-10-29 01:46朱文燕曾建谋
计算机仿真 2023年9期
朱文燕,曾建谋
(1. 广东科技学院机电工程学院,广东 东莞 523000;2. 广东工业大学机电工程学院,广东 广州 510000)
1 引言
车辆行驶在马路中会遭受颠簸,以及其它外界因素的干扰,导致轮速传感器在接收和传输数据时出现误差,在行驶过程中轮速检测系统装置,也容易因为车辆的振动产生波动,致使获取的信号与噪声混淆。通常情况下,常见噪声有两种,分别为高斯噪声[1]和冲击噪声,噪声与原始信号混合在一起,会影响检测系统对正常轮速信号的判断,进而做出错误决策。汽车轮速信号和防抱死制动系统(ABS)密切相关,在制动时,ABS系统会根据汽车轮速传感器传输的信号,对车辆行驶状态进行监测和判定。汽车轮速信号影响着整个车辆的安全,一旦噪声值过大,决策系统会失去判断,无法保证车辆稳健运行。
基于此,王德华等[2]构造空间自适应边缘检测函数,建立偏微分方程去噪模型,推导求解新模型的分数阶Euler-Lagarange方程的离散格式,最后利用变分偏微分方程完成信号去噪;米翰宁等[3]首先对信号进行分解,以近似系数能量和小波能量比值作为评价指标,选取最高小波值,对噪声进行检验,降低去噪误差,随后根据鲸鱼优化算法选取阈值,将信号噪声完全去除。
上述算法没有考虑到汽车轮速本身就是低频信号[4],仅仅去除了高频噪声,导致去噪后信号还存在无关信息,去噪结果并不理想。因此,本文提出基于经验模态分解的汽车轮速信号去噪算法。通过IMF分量分别剔除高频和低频噪声,再对剩下部分重构[5],达到完全去噪效果。同时考虑到采集信号过程中会存在误差,为此找到索引值[6],使信号重建的误差最小。经过仿真,得出本文所提的经验模态分解去噪效果更佳,提高了信号信噪比[7],实现更好地去噪。
2 经验模态分解的筛分标准差确定
经验模态分解作为一种时域分析方法,运用信号内部时间尺度变化,对信号能量和频率进行研究,把非线性和不平稳的信号,自动调整分解成能控制数目的线性及平稳的本征模态函数(IMF)分量[8],把不同的模态分量分解成各种窄带随机信号。获得模态分量时,在分解过程中必须依照下面两个前提:一方面是要先分解全部的信号长度,且经过的临界值点及零点位置数量基本一样,差值不能超过1;另一方面是在任意时间段,极值所组成的上下包络线[9]均值必定是零,噪声信号的包络线与时间相关。分解后的模态函数即为傅里叶变换所需要应用到正余弦的基函数,通过分解得到的模态分量是由信号本身的部分变化特点导致的,因此说明经验模态分解算法对信号分解的过程中,不含有外界因素,不需要考虑基函数的性能和匹配问题,即经验模态分解能后非常精确、客观地反映出待分解信号的原有特征。
经验模态分解的整体经过可以看作是一个迭代筛选过程[10],操作程序为:先自行推算出需要分解信号x(t)的所有极点,经过对最大值和最小值重复三次差值拟合法,计算出信号源的上下拟合包络线u(t)和v(t),两者满足关系
v(t)≤x(t)≤u(t)
(1)
上、下包络线的平均曲线m(t)为

(2)
在理论上,用x(t)减掉m(t)后剩余部分就是一个模态函数,用h1(t)表示,即
h1(t)=x(t)-m(t)
(3)
通常情况下,计算三条包络拟合线会出现在逼近样条时,易产生峰值超过电压和欠冲[11]的状况,导致新的阈值点对原始信号极值的坐标和数值大小有所影响,使经验模态分解不能满足函数形成的全部前提。为了能够获得适当的模态函数,用h1(t)来替换x(t),则相对应的h1(t)上、下包络线用u1(t)和v1(t)来表示,不断迭代上述过程,筛分k次,便有
m1(t)=[u1(t)+v1(t)]/2
(4)
h2(t)=h1(t)-m1(t)
(5)
mk-1(t)=[uk-1(t)+vk-1(t)]/2
(6)
hk(t)=hk-1(t)-mk-1(t)
(7)
直到所有的hk(t)满足模态函数前提,这时经过分解获得了首个模态分量,便得出c1(t)和分解余下的部分r1(t),关系式为
c1(t)=hk(t)
(8)
r1(t)=x(t)-c1(t)
(9)
将分解出第一个模态分量后余下的部分r1(t)重新进行分解筛分,获得的结果可描述成剩余部分的信号是单调函数[12],这时待分解信号分解完毕,得到的全部模态函数和余量表示如下
r1-c2=r2
rn-1-cn=rn
(10)
式中,n表示经验模态分解后取得的IMF总数量,rn表示为常数残余项[13],cn为模态分量。
那么,信号x(t)的模态函数和余量简化形式,表示如下
(11)
以筛分为前提条件,在经验模态分解过程中,要与上述模态分量中的首个筛选条件相符合,方便除掉附加干扰波[14];但通常第二个条件做到是极具困难的,因此本文采用标准差S来确保筛分能够正常完成,如式(12)所示

(12)
式中,S值通常取值范围在0.2至0.3左右,也可以利用筛选获得的上下包络均值当作标准,来判断是否结束经验模态分解的筛分程序。
在经验模态分解的筛分过程中,以信号数值为特点,运用最小的尺度来筛分,从而取得了频率慢慢变小但周期连续变大的序列,上述筛分程序通常可以认为是去噪信号的多分辨分析滤波[15]。
3 基于经验模态分解的汽车轮速信号去噪
一般情况下,大多数的噪声是高频信号,在通过经验模态分解去噪后的噪声绝大部分信号会集中在低阶IMF分量内,但汽车轮速信号也是一种低频信号,很难滤出。为此将IMF分量中信号完全分解,在去除低阶噪声后对剩下IMF分量进行重构,获得理想的去噪结果。但传感器在接收信号中,会受到设备稳定性和环境干扰,因此期望和实际结果有所误差。
随着时间变化去噪大小也会改变,在传感器接收信号时还会产生附加低频分量,影响信号时域与频域。如果采集到的信号存在偏差,则存在式(13)
(13)
式中,Ij为分解后第j阶IMF分量。
运用经验模态分解后取得的频率分布是由高至低IMF分量,低阶的IMF分量所相对的频率幅度高些,高阶的IMF分量与之相反。与加性高斯白噪声相混合的信号,分解后的噪声存在于阶数较低的IMF分量。通常低频信号受到干扰几率比较低,有价值的信号聚集在高阶分量处,其中有k个IMF分量的信号是核心模态,信号作为能量的主体;那么可判断前面的k-1个IMF分量的核心模态是噪声,噪声即为该分量的能量主体,并且该能量可以被预测。在受到噪声污染比较严重的情况下,信号与噪声的模态之间会出现混叠,找出IMF则可以达到汽车轮速信号去噪目的。
将含有噪声的信号x(t)′表示为
x(t)′=y(t)+n(t)
(14)
式中,y(t)为原始信号,n(t)为加性高斯白噪声。
对前任意IMF分量进行处理,函数公式为

(15)
式中,ηt(xi)表示处理后的IMF系数,λ表示去噪函数的临界值。
白噪声相关性分析:白噪声和原始信号之间的相关性为零,得出信号IMF分量和原始信号间的互相关关系为
y(t)=y(t)ci(t+τ)
(16)
式中,τ表示噪声分量,ci(t)描述的是第i个IMF分量。假设某一个IMF分量和原始信号源的相关性比较小,那么分析得出这个分量很有可能为噪声分量。需要实施强迫对称分解信号,去除白噪声,剩余的原始信号y(t)虽不会为零,但是数值较小。
n(t)白噪声自身相关性分析:白噪声最大取值在零点处,针对可能存在的噪声分量,计算自身相关性

(17)
式中,ci′(t)表示可能存在的噪声分量。若是在零点位置为最大值,但其余值都极小的情况下,则可以认定是噪声。
对含有噪声的IMF分量进行去噪,除去被判定为含噪的分量,然后利用剩下的IMF分量对信号重新构建,最后获得去噪后的轮速信号。
把轮速信号值x(t)′分割成IMF分量以及余项,其中,信号的小尺度IMF分量表示高频段,内存在干扰和噪声;经过分解剩余的大尺度IMF分量为低频段,它受噪声的干扰程度小。但还需利用EMD进行去噪,低频相比高频位置剩余的有效信息多,所以运用低频段的IMF分量对信号进行重新构建,即:

(18)
去噪过程中,信号内一定具有某个索引值IMF分量,在此分量以后的IMFs信号能量高过噪声能量。经验模态分解算法寻找到该索引值k=js,使重建的误差值最小,完成轮速信号去噪。
4 仿真研究
为了验证所提算法是否能够有效去除汽车轮速信号噪声,进行实验验证。实验在汽车运行状态下,对轮速信号进行监测,因现场环境存在外界因素干扰,轮速信号中含有噪声,因此需要对采集到的信号去噪处置。图1为采集的汽车轮速含噪信号,采样点数据长度为1000,采样频率为3000Hz。
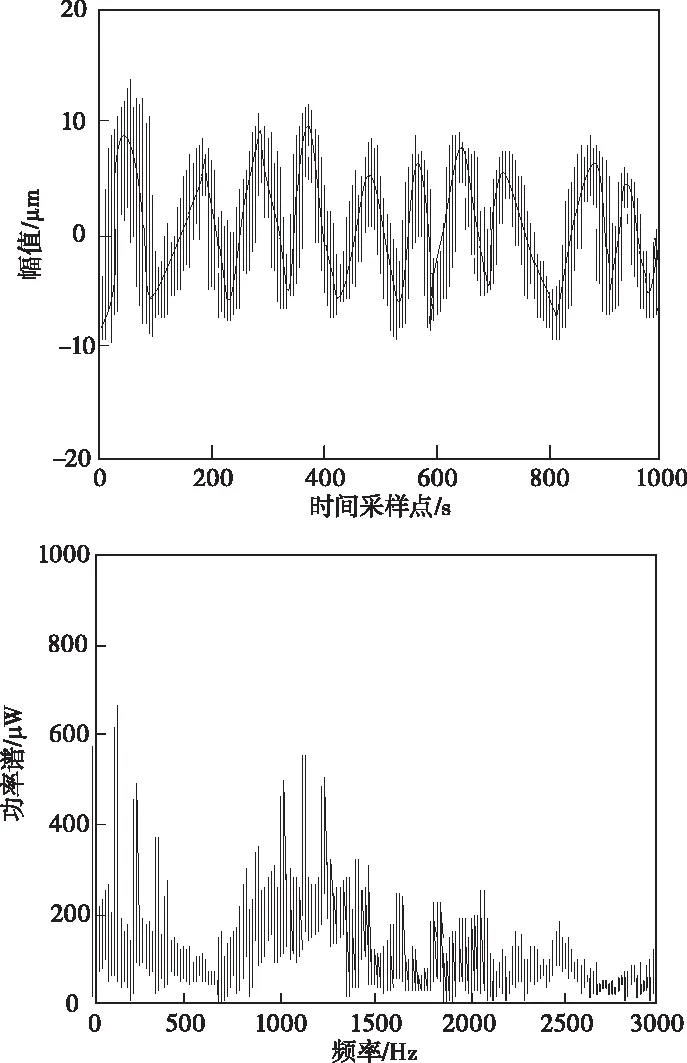
图1 汽车轮速信号和功率谱图
从图1中可以观察到信号内含噪情况很多,在功率谱图中存在大量的噪声干扰,并且幅值都相对较高,波动起伏较大,属于现场干扰噪声及白噪声。
图2为经过经验模态分解去噪后的汽车轮速信号模态分量,在去除掉低频及残余分量后,获取到4个IMF分量。图中高频的尺度为IMF1分量,白噪声基本上都在IMF1分量里。
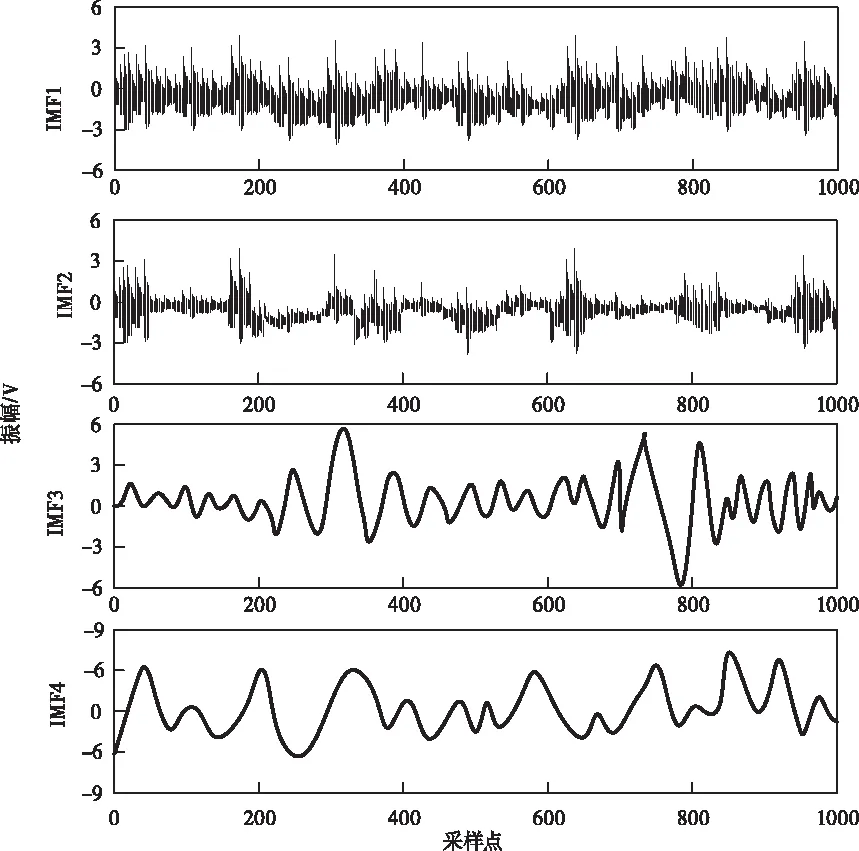
图2 汽车轮速信号MFS分解
探究方法信号去噪效果的好坏,一种是需要看噪声去除结果,即信号与噪声分割情况;另一种是观察去噪后与原信号是否相近,即重构后信号状态。根据所提方法,得到图3所示的分量重构信号,对分量进行组合后,获得图4所示去噪后的轮速信号和功率谱图。
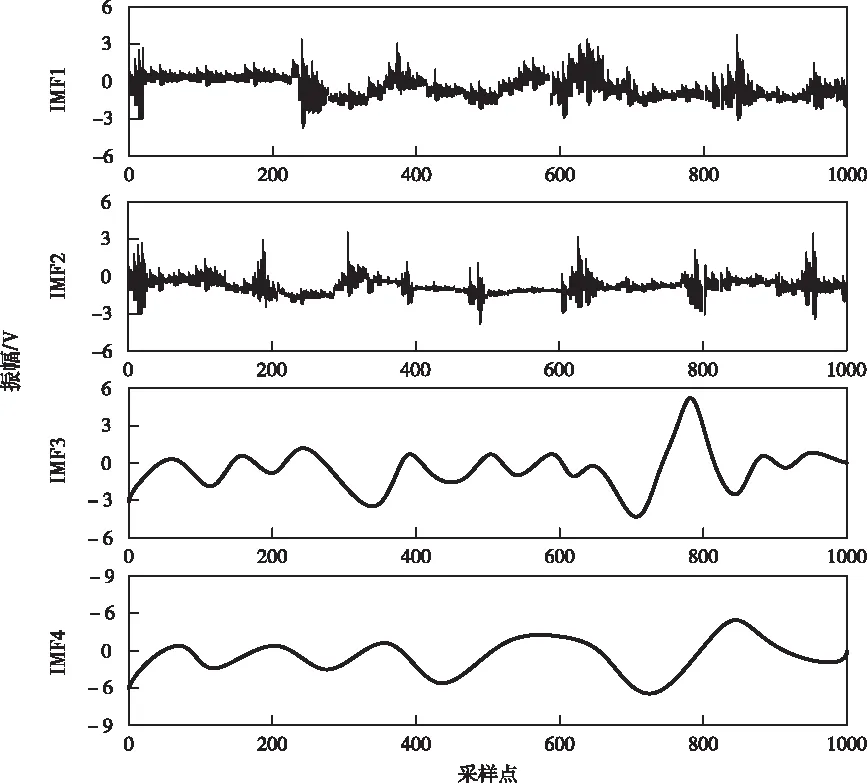
图3 汽车轮速信号分量重构
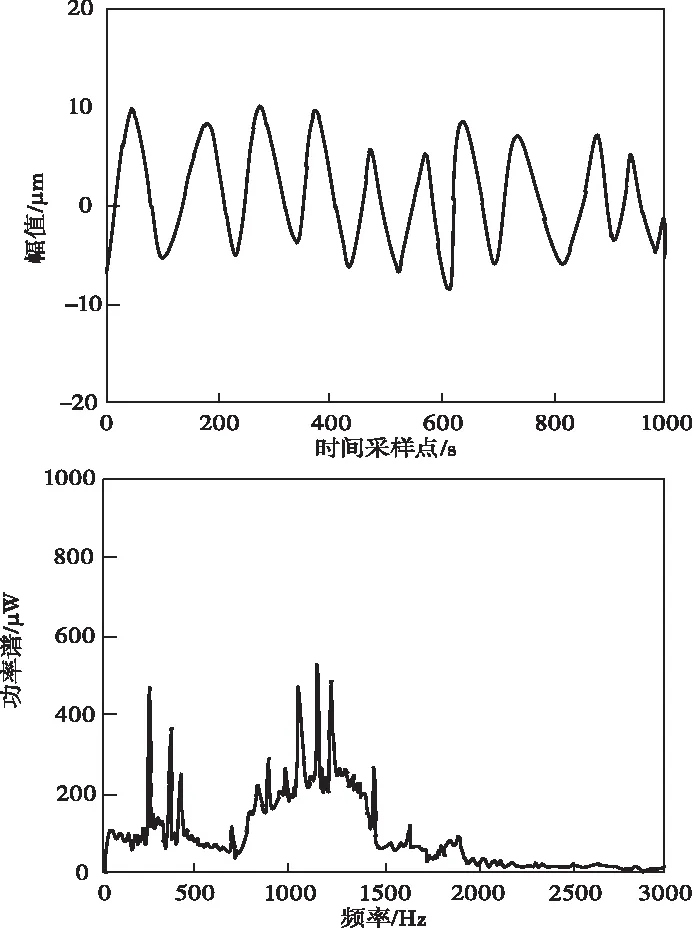
图4 经验模态分解去噪后轮速信号及功率谱图
通过观察,经验模态分解去噪信号在1500Hz-3000Hz频率段的功率谱值呈现明显的下降趋势,包含的噪声成分,应用经验模态分解能够得到有效去噪。这是因为本文充分地分析了信号的高频和低频区域,不仅能够完全去除掉高频的强干扰噪声,还通过分解、重构剔除了白噪声,使得到的信号波形图更加清楚、真实,说明本文提出的算法能够对信号进行有效去噪。
为了进一步证明方法性能,使用偏微分方程去噪法、小波阈值去噪法对图1进行去噪,结果如图5、6所示。

图5 偏微分方程去噪后轮速信号及功率谱图
由图4、图5和图6进行比较可以看出,经验模态分解去噪后的信号图更加清晰,噪声能够有效去除;其它方法对轮速信号的去噪效果不理想。因此得出经验模态分解去噪效果较好,去噪后信号曲线与原始曲线误差值小,能更好地实现信噪分离。
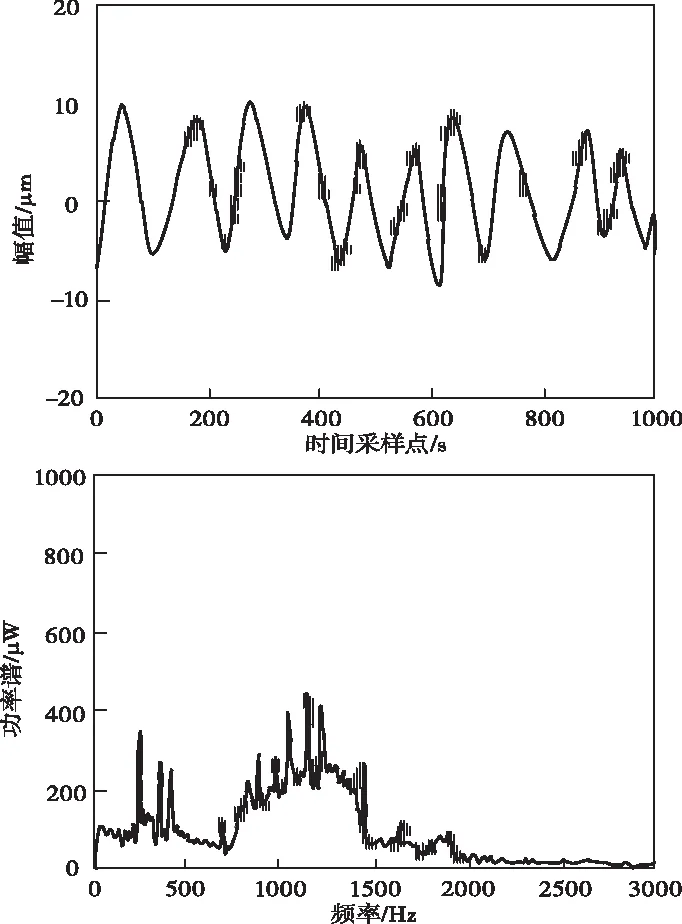
图6 小波阈值去噪后轮速信号及功率谱图
5 结论
随着经济发展汽车在生活中成为主要交通工具,行驶时会受到外界环境影响,使汽车轮速装置存在噪声,车辆自身的原始信号会产生混淆。轮速信号噪声的去除跟人们息息相关,因为噪声过大,车辆就会失去判断力和稳定性,影响车辆驾驶安全,因此本文利用经验模态分解算法对信号去噪进行探究,将噪声部分分量进行去除,再对剩下的重新构建,组成去噪后的信号轮速信号。分析仿真对比实验验证结果可知,经验模态分解算法相比其它两种算法更有优势,信号去噪效果更佳,去噪前后信号波动趋势拟合程度高,算法不会破坏原本信号内隐藏的信息。
猜你喜欢
再生资源与循环经济(2022年1期)2023-01-04
汽车安全与节能学报(2022年2期)2022-07-17
昆钢科技(2022年2期)2022-07-08
汽车实用技术(2022年10期)2022-06-09
昆钢科技(2022年1期)2022-04-19
基层中医药(2021年12期)2021-06-05
汽车实用技术(2020年24期)2021-01-05
英美文学研究论丛(2018年1期)2018-08-16
纺织科学研究(2017年6期)2017-07-03
现代冶金(2015年4期)2015-02-06
