
时变工况下基于精细复合多尺度散度熵的旋转机械故障诊断方法
2023-11-14 06:01卢太武马洪波王先芝陈改革
振动与冲击 2023年21期
卢太武,马洪波,王先芝,陈改革
(1.西安邮电大学 通信与信息工程学院(人工智能学院),西安 710121;2.西安邮电大学 自动化学院,西安 710121)
在工程实际中,旋转机械时常工作在时变工况下[1-2]。时变工况下的旋转机械振动信号表现出明显的时变调制的特点,难以准确地识别其运行状态。近年来,许多学者对时变工况下机械设备动态信号处理及故障诊断方法展开了研究。例如,Feng等[3]提出了一种通过时变振幅和频率解调谱来揭示滚动轴承时变故障特征频率的方法。Xue等[4]将不敏感相对残差特征与无量纲特征相结合,来检测轴承的退化趋势。Li等[5]提出了一种新的时变工况智能诊断框架和数据驱动故障特征分离方法,从所有信息中去除工况特征,并利用其余故障信息进行故障诊断。Zhao等[6]提出了一种无转速阶次跟踪方法来获取转速信息,并采用包络阶次谱来寻找故障特征频率。谭帅等[7]提出了一种基于周期记忆神经网络的故障诊断方法,通过提取旋转机械周期内故障特征,并利用记忆因子对周期内的传递规律进行选择性遗忘,学习其周期内的时序特征,从而实现滚动轴承的故障诊断。
振动信号经过角域重采样[8]转为角域信号后,仍然受到噪声等干扰源的干扰,影响故障诊断准确率。近年来,许多学者在这一方面做了大量的研究。Shao等[9]利用编码器等角度采样获取发动机振动信号,采用角域同步平均法对原始振动信号进行去噪,利用角域信号包络算法提取发动机早期故障特征。试验结果表明,基于角域信号包络算法的发动机故障检测方法为发动机早期故障的检测和诊断提供了一种新的方法。晏云海等[10]提出了基于循环谱分析的鲁棒性滚动轴承故障特征提取方法,经熵加权降低无关干扰成分影响以有效提取故障特征。周小龙等[11]提出了基于变分模态分解(variational mode decomposition,VMD)和最大重叠离散小波包变换(maximal overlap discrete wavelet packet transform,MODWPT)相结合的信号去噪方法,首先利用VMD分解进行初次去噪,再利用MODWPT方法进行二次去噪,进一步提升信号的去噪效果。
故障诊断中特征提取直接影响故障诊断准确率,特征提取是故障诊断最重要的一步。目前,常用的特征有基于时域或频域的统计特征、基于复杂度的特征、基于深度学习算法提取的特征等[12]。然而,为平稳信号设计的传统时域和频域特征提取技术总是难以提取到有效特征[13]。此时,表现信号复杂程度的非线性信号定量描述方法逐渐受到研究人员的青睐[14]。香农将熵定义为表征时间序列规律性、复杂性、周期性的指标。Richman等[15]提出样本熵(sample entropy,SE),利用关联维数的比率来衡量动力学复杂度。Chen等[16]对样本熵进行改进,提出了模糊熵(fuzzy entropy,FE)。
结合Costa等[17]提出的多尺度理论,Li等[18]利用改进的Vold-Kalman滤波器对变转速信号进行滤波,用多尺度样本熵(multiscale sample entropy,MSE)提取故障特征。姜万录等[19]通过精细复合多尺度波动散布熵对液压泵进行故障特征提取,通过粒子群优化支持向量机进行故障分类识别。Wang等[20]提出了一种新的熵值特征提取方法——多尺度散度熵(multiscale diversity entropy,MDE)。多尺度散度熵利用相空间中轨道的多样性来量化时间序列的动力学复杂度。与其他多尺度熵值方法相比,MDE具有高一致性、强抗噪性、计算效率高的优点。虽然多尺度散度熵具有上述优点,但是在高尺度下,多尺度时间序列会大大缩短,导致散度熵没有足够的信息来估计动力学复杂度,在高尺度因子下表现出不稳定行为。针对多尺度散度熵的这一缺陷,本文通过引入精细复合多尺度过程提出了精细复合多尺度散度熵(refined composite multiscale diversity entropy,RCMDE),极大的提高了散度熵的特征提取能力。
本文将RCMDE应用到时变工况下旋转机械故障诊断中,提出了一种时变工况下基于RCMDE的旋转机械故障诊断方法。首先采用重采样的方法将时域信号转为角域信号,然后利用变分模态分解和独立分量分析相结合的方法对角域信号进行去噪,最后采用RCMDE对去噪后的角域信号进行特征提取,将特征输入LR(logistic regression)分类器中进行故障诊断。
1 理论基础
1.1 散度熵
对于任意时间序列X={x1,x2,…,xi,…,xN},i∈[1,N],N为数据长度,散度熵(diversity entropy,DE)分为以下4个步骤计算。
步骤1相空间重构,基于Takens提出的相空间嵌入理论,设嵌入维度为m,则时间序列可以构建为一系列的空间轨线Y(m)。
(1)
步骤2计算相空间中相邻轨线之间的余弦相似度d[yi(m),yj(m)],得到余弦相似度集合D(m)。
D(m)={d1,…,dN-m}=
{d[yN-m-1(m),yN-m(m)]}
(2)
(3)
步骤3设符号数为ε,将余弦相似度的值域[-1,1]划分为ε个区间,表示为(I1,I2,…,Iε)。然后,统计余弦相似度落在每个小区间的概率(p1,p2,…,pε),显然,小区间的概率之和为1。
步骤4根据步骤3得到的区间概率(p1,p2,…,pε),散度熵的计算方法如式(4)所示。
(4)
式中:ED(m,ε)为散度熵;Pk为余弦相似度的区间概率。
1.2 多尺度散度熵
为了揭示时间序列隐藏在不同尺度下的故障信息,散度熵与多尺度过程相结合,提出了多尺度散度熵。多尺度散度熵可通过两个步骤计算。

(5)
式中,τ为尺度,且为正整数,通过调节其大小可得到不同尺度的时间序列。
(6)
式中:m为嵌入维度;ε为符号数。
1.3 精细复合多尺度散度熵
精细复合多尺度散度熵算法流程,如图1所示。多尺度散度熵在高尺度下分解生成的时间序列的长度会大大缩短,使得散度熵没有足够的信息来估计时间序列的动力学复杂度,导致高尺度下的熵值不稳定。例如长度为2 048的时间序列在尺度为10时,分解后的子时间序列长度仅为204,长度缩减为原序列的1/10,难以为复杂度估计提供充足的信息。RCMDE通过滑动平均过程在高尺度下生成多个时间序列,利用多个时间序列进行估计,能够更准确的统计相空间中的状态概率,提高了多尺度散度熵在高尺度下的稳定性。例如长度为2 048的时间序列在尺度为10时,RCMDE分解出10个长度为204的子时间序列,状态空间由200增大到1 999,极大的提高了状态概率的准确性和稳定性。RCMDE(ERCMD)可按以下步骤计算:
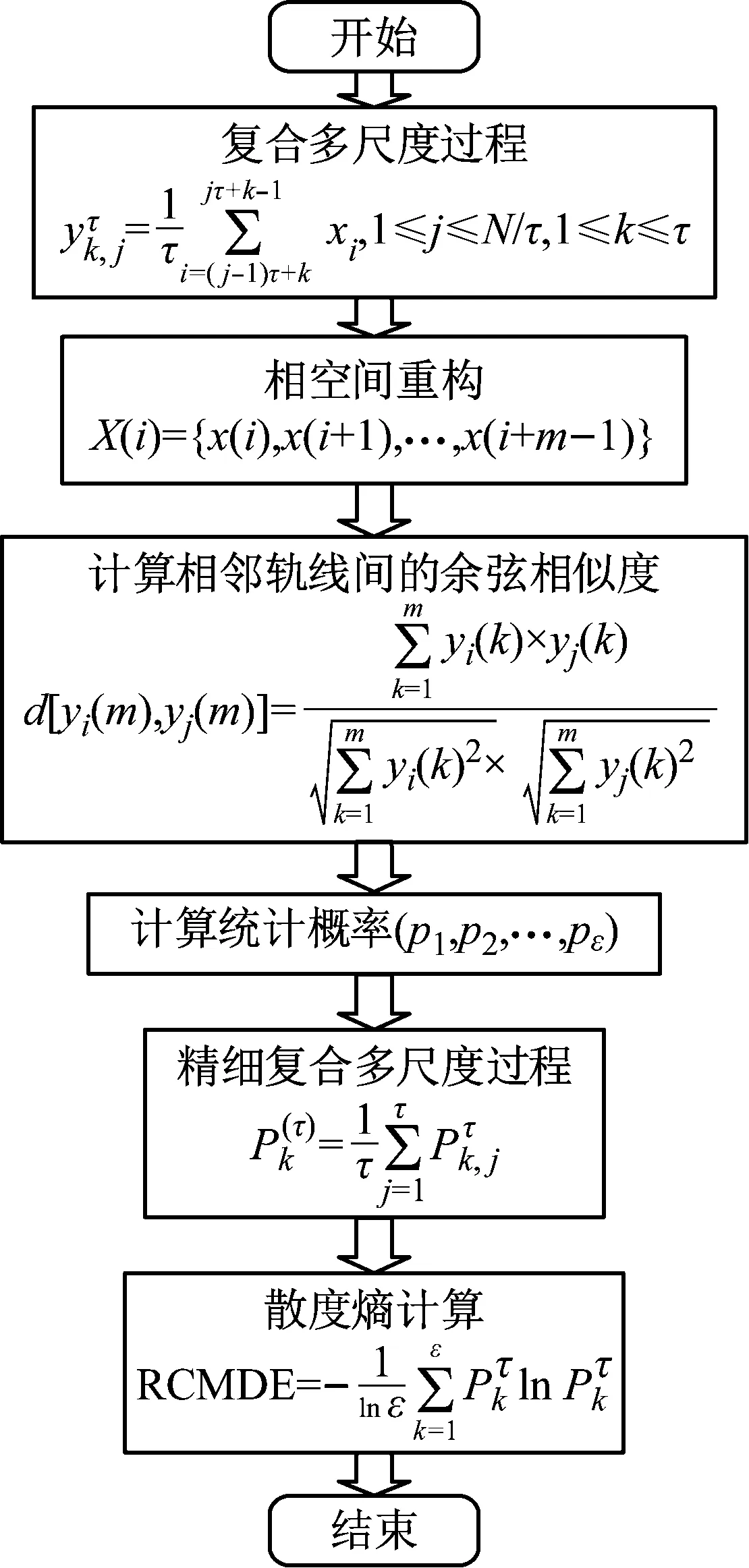
图1 RCMDE算法流程图
(7)
(8)

1.4 变分模态分解
VMD分解是一种可自适应确定序列模态分解个数的信号处理方法,目前已广泛应用到振动信号降噪中。
假设序列由K个有限带宽的模态分量μk(t)组成,VMD分解是寻找K个带宽之和最小的模态函数μk(t),k∈{1,2,…,k}。步骤如下所示。
步骤1对模态函数μk(t)进行Hilbert变换得到解析信号,即
(9)
式中:t为时间,是大于0的正数;δ(t)为冲激函数;{μk(t)}={μ1(t),μ2(t),…,μk(t)}为分解得到的K个IMF(intrinsic mode function)分量。
步骤2各模态解析信号与算子e-jωkt相乘,即
(10)
式中,{ωk}={ω1,…,ωk}为各IMF分量μk(t)的中心频率。
步骤3计算μk(t)的梯度的平方范数L2,并求出各IMF的带宽。对应的表达式为
(11)
(12)
为了找到上述问题的最优解,引入二阶惩罚因子α与Lagrange乘子λ(t),其中,惩罚因子α直接关系到信号能否准确重构。表达式为
L[{μk(t)},{ωk},λ(t)]=
(13)
(14)
式中,i∈{1,2,…,K}且i≠k。利用Fourier变换,完成时频域的转换,用ω-ωk代替ω,优化问题的解为
k∈{1,2,…,K}
(15)
中心频率的更新方式如式(16)所示。
(16)

在变分模态分解后将得到一系列的IMF信号,通过峭度准则将IMF信号重构为观测信号和噪声信号。峭度准则的计算方法如文献[21]所示。
1.5 独立分量分析
利用峭度准则将IMF信号重构为观测信号和噪声信号后,采用独立分量分析(independent component analysis,ICA)将观测信号和噪声信号进行解混生成去噪后的角域信号。ICA的计算方法如文献[22]所示。
2 基于RCMDE的旋转机械故障诊断框架
时变工况下的旋转机械振动信号具有明显的时变调制的特点,且易受噪声等干扰源的影响。本文提出了一种时变工况下基于RCMDE的旋转机械故障诊断方法。算法流程如图2所示。首先采用重采样的方法将时域信号转为角域信号,然后利用变分模态分解和独立分量分析相结合的方法对角域信号进行去噪,最后采用RCMDE对去噪后的角域信号进行特征提取,将特征输入 LR 分类器中进行故障诊断。
步骤1通过对原始振动信号角域重采样将时域信号转为角域信号,消除转速对原始振动信号的影响。
步骤2采用VMD和ICA联合降噪的方法对角域信号进行降噪处理,消除噪声等干扰源对角域信号的影响。首先对角域信号进行VMD分解生成多个IMF分量,其次根据峭度准则将IMF分量重构为观测信号和噪声信号,最后采用ICA算法进行解混,生成去噪后的角域信号。
步骤3采用RCMDE对去噪后的角域信号进行特征提取,将提取的特征输入LR分类器进行故障诊断。
3 试 验
3.1 试验设置
本试验采用位于西北工业大学的机械故障模拟器进行齿轮故障试验。试验台及其示意图如图3(a)和图3(b)所示。在该试验中,使用电动机驱动一级斜齿轮减速器。该减速器由一对直齿锥齿轮组成,齿数比为18∶27。通过齿轮箱上方的加速度传感器来获取振动信号,采样频率设定为12 800 Hz。
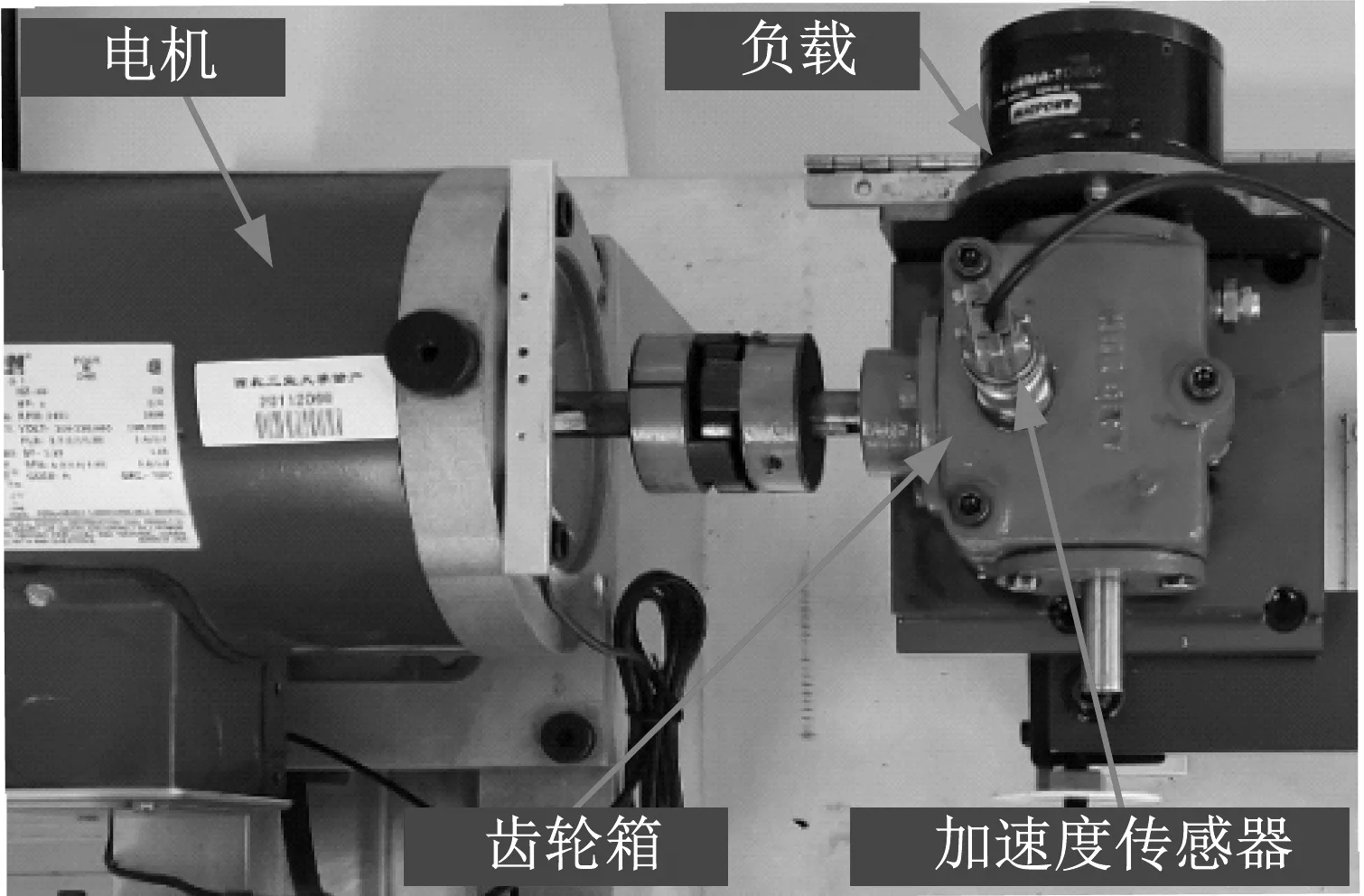
(a) 试验台
本试验设计了4种类型的故障:主动齿点蚀(见图4(a)),主动齿断齿(见图4(b)),主动齿缺齿(见图4(c)),从动齿裂纹(见图4(d))。总共有5种健康状态的数据。每种健康状态有200个样本,总共有1 000个样本,每个样本长度为1 024个采样点,时域振动信号和转速如图5和图6所示。

(a)
(a) 主动齿点蚀

图6 转速图
3.2 对比试验
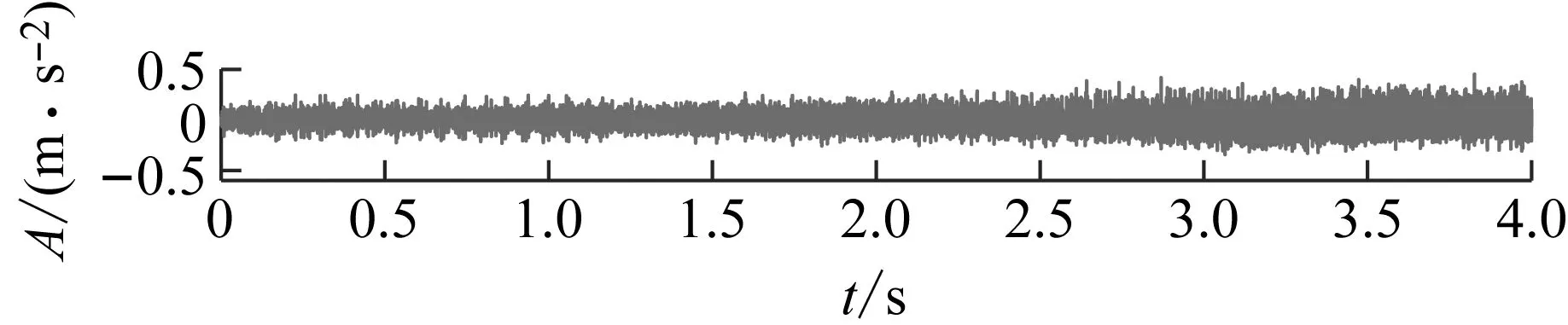
重采样的角域信号如图7所示,对角域信号采用VMD和ICA联合降噪的方法进行降噪,去噪后的角域信号如图8所示。

(a) 主动齿点蚀

(a) 主动齿点蚀
为了展示本文所提出的方法的优越性,用多尺度散度熵、多尺度排列熵(multiscale permutation entropy,MPE)、多尺度模糊熵(multiscale fuzzy entropy,MFE)、复合多尺度散度熵(composite multiscale diversity entropy,CMDE)、复合多尺度度排列熵(composite multiscale permutation entropy,CMPE)、复合多尺度模糊熵(composite multiscale fuzzy entropy,CMFE)、精细复合多尺度排列熵(refine composite multiscale permutation entropy,RCMPE)、精细复合多尺度散度熵、精细复合多尺度模糊熵(refine composite multiscale fuzzy entropy,RCMFE)等9种熵值方法分别提取去噪角域信号的故障特征,设置对比试验。
熵值方法参数设置如表1所示。参数会影响熵值方法特征提取能力,进而影响故障诊断准确率。根据文献[23],将每种熵值方法均设置为最优参数。RCMDE中共有嵌入维度、尺度因子和符号数3个参数,本文分别设置了3个试验进行讨论。3个试验均采用固定两个参数,调整另一个参数来观察其对最终分类结果的影响,试验结果如图9所示。在图9(a)嵌入维度试验中,嵌入维度从1到8依次递增,当嵌入维度大于4后,嵌入维度对准确率影响较小;当嵌入维度为6时,准确率最高,故将嵌入维度设置为6。在图9(b)符号数试验中,符号数从10到80依次递增,符号数对准确率的影响较小;当符号数为20时,准确率最高,故将符号数设置为20。在图9(c)尺度因子试验中,尺度因子从10到80依次递增,当尺度因子大于50后,尺度因子对准确率影响较小;当尺度因子等于60时,准确率最高,故将尺度因子设置为60。

表1 9种熵值方法参数设置

(a) 嵌入维度试验
训练样本和测试样本按1∶1划分。为减小随机性,每种方法将运行20次,其平均分类精度和标准差将作为评价每种方法性能的指标。
3.3 结果分析
如图5所示,当齿轮在时变工况下运行时,振动信号频率和幅值均表现出时变性,无法准确识别故障特征频率,故障诊断准确率较低。重采样后的角域信号如图7所示,从图7可以看出,重采样的角域信号仍是非平稳信号,这是由于角域信号只是消除了转速的影响,仍会受到噪声等干扰源的影响。因此本文采用VMD和ICA联合去噪的方法对角域信号进行去噪,去噪后的角域信号如图8所示。从图8可以看出,去噪后的角域信号趋于平稳,消除了噪声等干扰源对角域信号的影响。
然后,采用RCMDE对去噪后的角域信号进行特征提取,并采用LR分类器来识别故障类型。同时为展示本文方法的优越性,还采用其他8种熵值方法进行特征提取,其结果如表2所示。
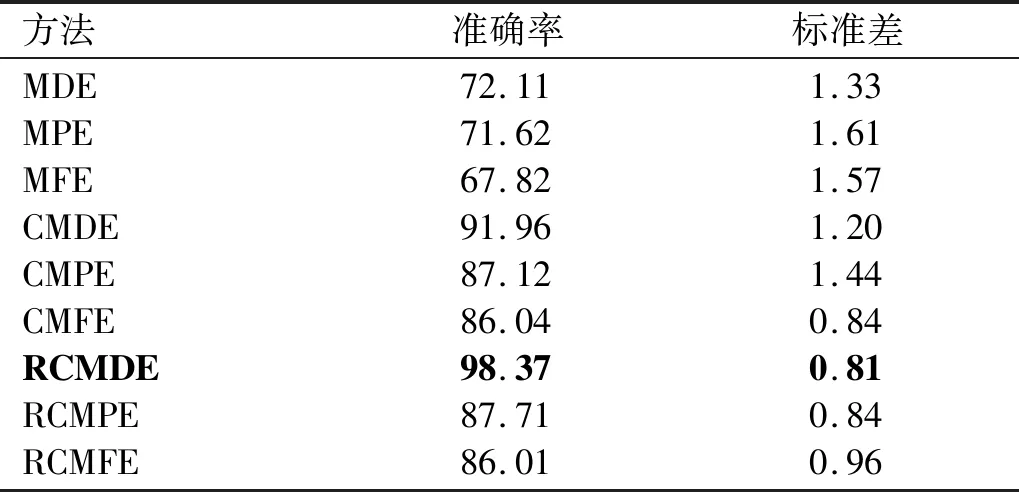
表2 去噪角域信号故障诊断准确率
从表2可以看出:
(1) 基于复合多尺度熵值方法进行特征提取的故障诊断准确率优于基于多尺度熵值方法进行特征提取的故障诊断准确率,例如CMDE方法准确率(91.96%)高于MDE方法准确率(72.11%)。这是由于滑动平均过程可以多次估计信号动力学复杂度以获得稳定的熵值,分类器可以更容易地区分故障类型。
(2) 精细复合多尺度散度熵方法准确率(98.37%)高于复合多尺度散度熵方法准确率(91.96%),这是由于精细复合多尺度过程通过滑动平均窗口对状态概率进行精确估计,进一步提高了熵值的稳定性,从而提高了故障诊断的准确率。
(3) 本文所采用的方法在所有9种方法中取得了最低的准确率标准差(0.81%),这说明本文所提精细复合多尺度散度熵具有最高的稳定性,能够为LR分类器提供稳定的熵值特征,使得诊断结果的波动性最小。
综上所述,本文所采用的方法在所有9种方法中取得了最高的分类准确率(98.37%)和最低的准确率标准差(0.81%),进一步证明了本文所提的基于RCMDE进行故障诊断的方法的优越性。
4 结 论
本文提出了时变工况下基于精细复合多尺度散度熵的旋转机械故障诊断方法,首先,采用重采样的方法将时域信号转为角域信号,并利用变分模态分解和独立分量分析相结合的方法对角域信号进行去噪。其次,采用RCMDE对去噪后的角域信号进行特征提取,然后将故障特征输入LR分类器中识别故障类型。通过与其他8种熵值方法进行对比试验,结果表明本文所提出的方法具有最高的准确率和最小的标准差,证明了本文所提方法的优越性。
猜你喜欢
数学年刊A辑(中文版)(2022年1期)2022-08-20
数学物理学报(2019年6期)2020-01-13
航空工程进展(2019年6期)2019-12-31
长沙航空职业技术学院学报(2019年3期)2019-04-24
苏州科技大学学报(自然科学版)(2018年4期)2018-11-21
数学物理学报(2018年3期)2018-07-17
智富时代(2017年4期)2017-04-27
智富时代(2017年4期)2017-04-27
山西大同大学学报(自然科学版)(2016年2期)2016-12-12
广东石油化工学院学报(2016年6期)2016-05-17
