
一种自动循迹AGV平台机械结构设计及力学分析
2023-12-08 17:54邹亮吴晓袁勤政
武汉纺织大学学报 2023年5期
关键词:机械设计
邹亮 吴晓 袁勤政
摘 要:AGV作为车间智能移动机器人的核心组成部分,成为近年来学者们的研究热点,文章提出了一种自动循迹AGV小车的机械结构设计方案,包括车体及轮系机械结构设计、运动过程的动力学分析以及电机选型,为自动循迹AGV的研发提供一定的技术参考。
关键词:AGV;机械设计;力学分析
中图分类号:TP273 文献标识码:A 文章编号:2095-414X(2023)05-0053-05
0 引言
随着中国制造2025的提出,制造企业纷纷加快了自动化、智能化的发展步伐,而自动导引车AGV(Automatic guided vehicle)成为柔性物流系统和自动仓储系统不可缺少的重要组成部分。另外,我国正面临着人口老龄化、产业升级等影响因素,导致制造业招工困难、用工成本高。因此,能够代替人工的智能AGV小车,对企业生产自动化和社会发展起着重要作用[1]。
传统形式的AGV结构设计往往仅是先凭借着汽车设计者个人的工作经验或已有的结构分析技术方法,对其初始结构设计方案进行设计,生产出来后再进行性能试验。若设计无法满足性能需求,就要对车体原有车身的结构设计方案进行优化调整和性能试验设计,直至最终AGV车体结构设计达到所需的性能要求。这种分析设计的方法往往在实践中有着极大的主观性、偶然性,而且因为设计分析周期普遍较长,也给设计者的决策带来很多困难。因此通过计算机强大的运算能力和计算机辅助技术对结构进行合理的优化设计与分析是目前AGV设计者们的最佳选择[2]。
本文提出了一种自动循迹AGV小车的机械结构设计方案,并对驱动总成设计以及动力学特性等部分进行了着重阐述。
1 AGV平台整体方案设计
1.1 AGV平台驱动方案及技术参数设计
随着移动机器人的快速发展,AGV的驱动方式更加多元化、便捷化。目前市面上常见的AGV转向驱动轮结构主要分为四大类,即单舵轮型、双舵轮型、差速轮型和麦克纳姆轮型,每种驱动结构都有自己的优缺点和应用场合。
差速轮驱动具有灵活性和稳定性高,成本低,对电机和控制精度要求不高等优点[3],因此,本文设计的AGV平台选择了差速轮驱动方式,为克服该驱动结构对地面平整度要求苛刻的劣势,本文利用弹簧和转轴结构设计增加驱动轮抓地力,这是该AGV平台的一个创新点。
根据总体设计要求并结合现有条件,AGV设计基本参数如表1所示。
1.2 AGV平台机械结构设计
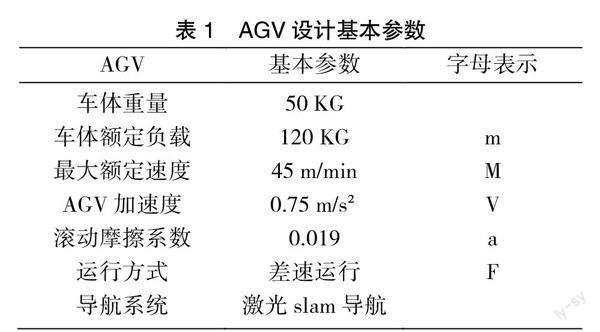
本次设计的AGV平台主要由机架、双驱动机构、控制机构、激光扫描机构等4个部分组成,如图1所示。机架是整个平台的支撑件,激光扫描机构通过扫描周围环境,经软件构建出二维地图,再通过控制机构调节双驱动机构两个电机的转速,由电机带动主动轮旋转驱动平台运动。
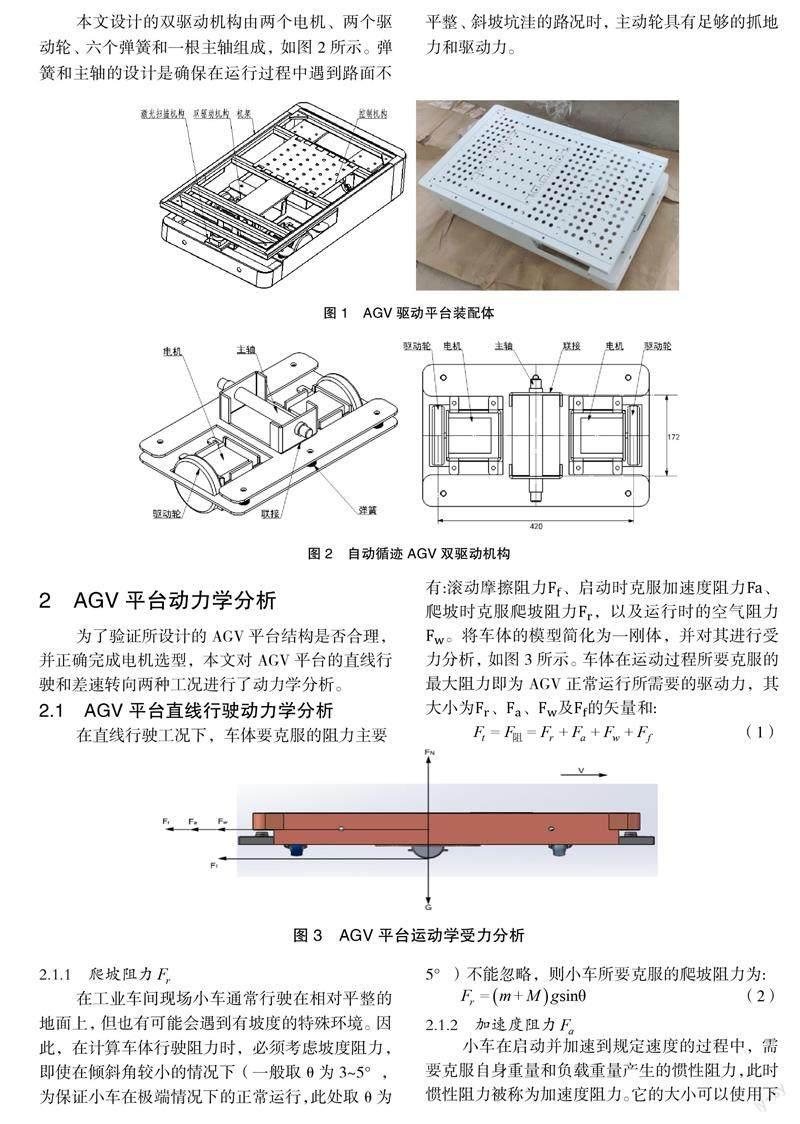
本文设计的双驱动机构由两个电机、两个驱动轮、六个弹簧和一根主轴组成,如图2所示。弹簧和主轴的设计是确保在运行过程中遇到路面不平整、斜坡坑洼的路况时,主动轮具有足够的抓地力和驱动力。
2 AGV平台动力学分析
为了验证所设计的AGV平台结构是否合理,并正确完成电机选型,本文对AGV平台的直线行驶和差速转向两种工况进行了动力学分析。
2.1 AGV平台直线行驶动力学分析
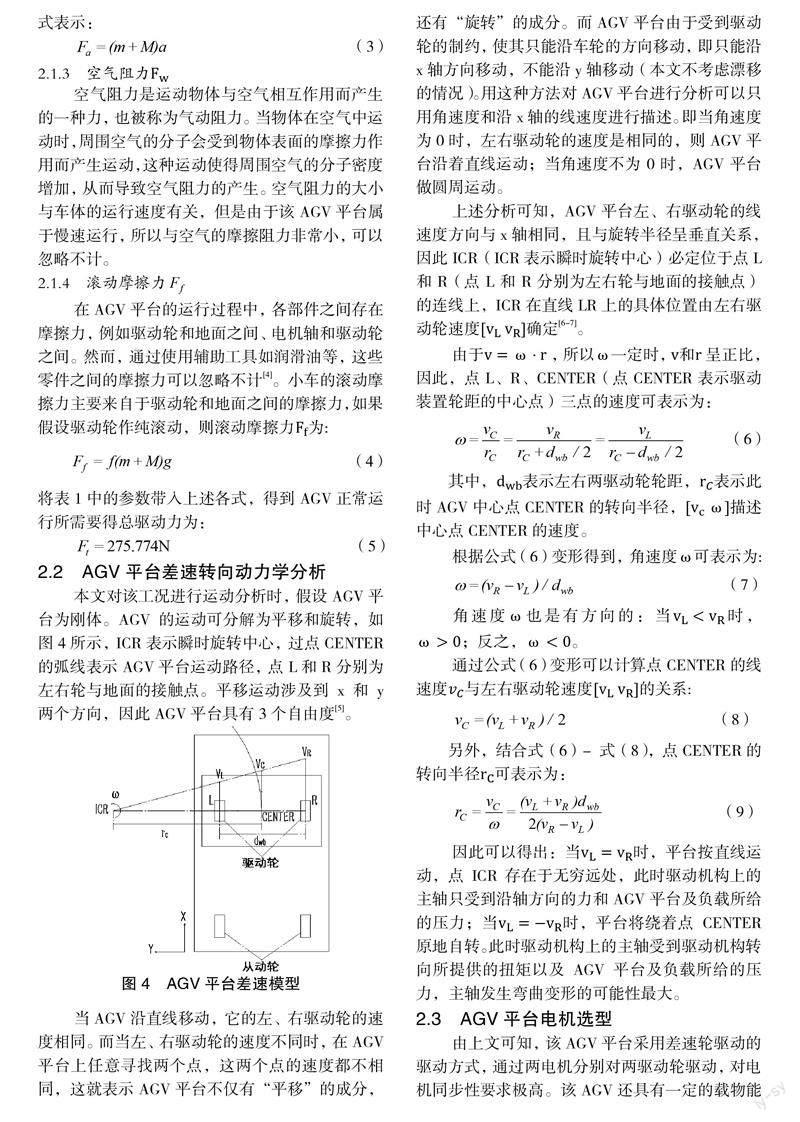
在直线行驶工况下,车体要克服的阻力主要
有:滚动摩擦阻力F_f、启动时克服加速度阻力Fa、爬坡时克服爬坡阻力F_r,以及运行时的空气阻力F_w。将车体的模型简化为一刚体,并对其进行受力分析,如图3所示。车体在运动过程所要克服的最大阻力即为AGV正常运行所需要的驱动力,其大小为F_r、F_a、F_w及F_f的矢量和:
2.1.1 爬坡阻力
在工业车间现场小车通常行驶在相对平整的地面上,但也有可能会遇到有坡度的特殊环境。因此,在计算车体行驶阻力时,必须考虑坡度阻力,即使在倾斜角较小的情况下(一般取θ为3~5°,为保证小车在极端情况下的正常运行,此处取θ为5°)不能忽略,则小车所要克服的爬坡阻力为:
(2)
2.1.2 加速度阻力
小車在启动并加速到规定速度的过程中,需要克服自身重量和负载重量产生的惯性阻力,此时惯性阻力被称为加速度阻力。它的大小可以使用下式表示:
(3)
2.1.3 空气阻力F_w
空气阻力是运动物体与空气相互作用而产生的一种力,也被称为气动阻力。当物体在空气中运动时,周围空气的分子会受到物体表面的摩擦力作用而产生运动,这种运动使得周围空气的分子密度增加,从而导致空气阻力的产生。空气阻力的大小与车体的运行速度有关,但是由于该AGV平台属于慢速运行,所以与空气的摩擦阻力非常小,可以忽略不计。
2.1.4 滚动摩擦力
在AGV平台的运行过程中,各部件之间存在摩擦力,例如驱动轮和地面之间、电机轴和驱动轮之间。然而,通过使用辅助工具如润滑油等,这些零件之间的摩擦力可以忽略不计[4]。小车的滚动摩擦力主要来自于驱动轮和地面之间的摩擦力,如果假设驱动轮作纯滚动,则滚动摩擦力F_f为:
(4)
将表1中的参数带入上述各式,得到AGV正常运行所需要得总驱动力为:
(5)
2.2 AGV平台差速转向动力学分析
本文对该工况进行运动分析时,假设AGV平台为刚体。AGV的运动可分解为平移和旋转,如图4所示,ICR表示瞬时旋转中心,过点CENTER的弧线表示AGV平台运动路径,点L和R分别为左右轮与地面的接触点。平移运动涉及到x和y两个方向,因此AGV平台具有3个自由度[5]。
当AGV沿直线移动,它的左、右驱动轮的速度相同。而当左、右驱动轮的速度不同时,在AGV平台上任意寻找两个点,这两个点的速度都不相同,这就表示AGV平台不仅有“平移”的成分,还有“旋转”的成分。而AGV平台由于受到驱动轮的制约,使其只能沿车轮的方向移动,即只能沿x轴方向移动,不能沿y轴移动(本文不考虑漂移的情况)。用这种方法对AGV平台进行分析可以只用角速度和沿x轴的线速度进行描述。即当角速度为0时,左右驱动轮的速度是相同的,则AGV平台沿着直线运动;当角速度不为0时,AGV平台做圆周运动。
上述分析可知,AGV平台左、右驱动轮的线速度方向与x轴相同,且与旋转半径呈垂直关系,因此ICR(ICR表示瞬时旋转中心)必定位于点L和R(点L和R分别为左右轮与地面的接触点)的连线上,ICR在直线LR上的具体位置由左右驱动轮速度[v_L v_R]确定[6-7]。
由于v=ω·r ,所以ω一定时,v和r 呈正比,因此,点L、R、CENTER(点CENTER表示驱动装置轮距的中心点)三点的速度可表示为:
(6)
其中,d_wb表示左右两驱动轮轮距,r_C表示此时AGV中心点CENTER的转向半径,[v_c ω]描述中心点CENTER的速度。
根据公式(6)变形得到,角速度ω可表示为:
(7)
角速度ω也是有方向的:当v_L
通过公式(6)变形可以计算点CENTER的线速度v_C与左右驱动轮速度[v_L v_R]的关系:
(8)
另外,结合式(6)-式(8),点CENTER的转向半径r_C可表示为:
(9)
因此可以得出:当v_L=v_R时,平台按直线运动,点ICR存在于无穷远处,此时驱动机构上的主轴只受到沿轴方向的力和AGV平台及负载所给的压力;当v_L=-v_R时,平台将绕着点CENTER原地自转。此时驱动机构上的主轴受到驱动机构转向所提供的扭矩以及AGV平台及负载所给的压力,主轴发生弯曲变形的可能性最大。
2.3 AGV平台电机选型
由上文可知,该AGV平台采用差速轮驱动的驱动方式,通过两电机分别对两驱动轮驱动,对电机同步性要求极高。该AGV还具有一定的载物能力,工作时可能会遇到路面不平整、斜坡坑洼的路况,因此对转矩要求也很高。综合分析采用直流无刷电机对驱动轮进行驱动。
直流无刷电机具备启动力矩大、有一定的过载能力等优点,并釆用电子换向的方法,即通过电机内部的霍尔传感器检测磁极的相对位置,当AGV后退时,使电机中线圈的电流方向发生变化,从而改变电机旋转方向。此外,由于直流无刷电机采用模拟量进行电机控制,在AGV控制过程可以轻松实现电机立即制动、频繁换向、频繁启停、应对负载突变等功能[8]。
根据前文所述的基本参数要求以及实际工况,本文最终选用SYNTRON电机的型号。具体参数如表2所示。
3 AGV平台主轴有限元分析及安全校核
由上文可知,本文设计的差速驱动AGV平台在面临恶劣工况(v_L=〖-v〗_R)时,驱动机构上的主轴受到驱动机构转向所提供的扭矩以及AGV平臺及负载所给的压力,主轴发生弯曲变形的可能性最大,此时该AGV平台极易发生损坏。
为确保AGV平台能够正常安全运行,需对主轴的安全性能进行校核。为此,本文分析了主轴所受到的压力和恶劣工况(v_L=〖-v〗_R)下的扭矩,并进行了有限元仿真和安全校核。
3.1 驱动单元力的计算
如图2所示,两驱动轮的轮距为L_1=420 mm=0.42 m,联接内侧间距为L_2=172 mm=0.172 m。由式(5)可知总驱动力F_t=275.774 N。总扭矩:
(10)
联接与主轴相接触位置的两个分扭矩:
(11)
联接与主轴相接触位置所施加的力:
(12)
从而可以得出总扭矩:T_总=57.91 N·m;两个接触位置分别对主轴施加的力的大小:F_分=336.7 N;再加上平台的重量和负载所施加给主轴两端的力,得到F_载=1666 N;由于主轴较短且整个平台对负载的受力均匀,主轴的两端所受到的压力差可以忽略不计,两端分别受到F_压=F_载/2=833 N。
3.2 主轴及联接有限元模型建立
本文使用Ansys workbench对主轴进行静力学分析。按AGV平台初步方案建立三维模型。将其简化为主轴与联接,采用四面体单元对模型进行网格划分,如图5所示。
3.3 材料属性
联接和主轴均采用杨氏模量为210 MPa、泊松比为0.3、屈服极限为235 MPa的Q235普通碳钢。为避免在AGV平台使用过程中出现特殊情况导致结构破坏,最大应力应控制在许用应力以下。许用应力等于屈服极限除以安全系数,本处取值为160 MPa。
3.4 载荷与边界条件
(1)固定约束:在联接底部施加固定约束将其固定。(2)施加力与力矩:对主轴施加T_总的总扭矩,根据右手定则,方向为沿Y轴正方向。对主轴两端分别施加负载F_压,方向沿Y轴负方向。
3.5 结果分析
计算结果如图6所示。由6(a)、6(b)可以得出,平台在向左自转时,主轴所受得最大应力出现在联接的底部折弯处,其值为23.066 MPa,远小于许用应力值160 MPa;最大变形量为7.8×10-3 mm,远小于传动轴的弯曲变形量1.5 mm[9]。由模拟结果可知,主轴满足强度和刚度要求,安全可靠。
3.6 研制与试验
在完成AGV平台的机械结构设计、电机选型、主轴力学分析及安全校核后,需对其进行运行试验,主要包括正常工况下的运行试验以及恶劣工况下的转向实验。通过试验验证该AGV平台能否按预期正常运行,了解在设计中存在的问题以及实际运行与理想之间的差距。
将AGV放置于试验场地,由表1可知,试验地面与聚氨酯轮胎的滚动摩擦系数为0.019。同时地面平整度一般,最大坡度值约为0.035,符合国标中的规定,最大坡度值小于0.05的要求,地面环境满足该AGV的运行基本要求。
如图7所示,分别测试AGV平台在无负载(a)和有负载(b)的正常工况下的运行和原地自转。试验证明该AGV平台在有负载和无负载的情况下都能够在预定路况下稳定运行。
4 结论
本文对一种自动循迹的AGV平台进行设计,选择差速驱动的驱动方式,并设计出双驱动机构来保证AGV平台遇到不同路面时的平稳性。对平台的直线运行时的状态进行运动学分析,并对其电机进行选型,电机型号选择SYNTRON电机的57BL-2030H1-LS-B型。然后对关键部位进行静力学分析验证其合理性,验证得到最大应力为23.066 MPa远小于许用应力值,最大变形量为7.8×10-3 mm远小于传动轴的弯曲变形量。随后进行试验,试验证明该AGV能够按预期稳定运行。
参考文献:
辛海明, 刘月昊, 宋鹏飞, 等. 一种智能机器人AGV小车的设计[J]. 现代制造技术与装备, 2019, 269(04): 25-27 +30.
李子涵. 重载AGV机械结构分析与优化设计[D]. 天津:河北工业大学, 2022.
雷川川. 新型AGV驱动单元关键技术研究[D]. 郑州:郑州大学, 2017.
吴世杰. 基于轨迹纠偏的双驱动单元AGV建模仿真及实验研究[D]. 青岛:山东科技大学, 2020.
哈尔滨工业大学理论力学教研室.理论力学[M]. 北京:高等教育出版社,2016.
胡艳凯. 双驱动机器人小车的结构设计及计算[J]. 佛山科学技术学院学报(自然科学版), 2020, 38(4): 6-8.
阮志虎. 两轮差速驱动移动机器人的运动模型与控制研究[D]. 重庆:重庆大学, 2015.
《数字化手册系列》编委会. 机械设计手册[M]. 北京:化学工业出版社, 2008.
范钦珊, 殷雅俊. 材料力学[M]. 北京:清华大学出版社有限公司, 2004.
Mechanical Structure Design and Mechanical Analysis of an Automatic
Tracking AGV Platform
ZOU Liang,WU Xiao,YUAN Qin-zheng
(School of Mechanical Engineering and Automation, Wuhan Textile University, Wuhan Hubei 430200, China)
Abstract:As the core component of intelligent mobile robots in the workshop, AGV has become a hot research topic for scholars in recent years. This paper proposes a mechanical structure design scheme for an automatic tracking AGV car, including the mechanical structure design of the vehicle body and wheel train, dynamic analysis of the motion process, and electrical selection, providing a certain technical reference for the research and development of automatic tracking AGV.
Keywords:AGV platform; mechanical design; mechanical analysis
(責任编辑:周莉)
*通讯作者:吴晓(1972-),男,教授,博士,研究方向:机械设计与制造、微塑性加工技术等.
猜你喜欢
机械工业标准化与质量(2023年6期)2023-09-26
建材发展导向(2021年18期)2021-11-05
活力(2021年4期)2021-07-28
湖北农机化(2020年4期)2020-07-24
湖北农机化(2020年4期)2020-07-24
湖北农机化(2020年4期)2020-07-24
湖北农机化(2020年4期)2020-07-24
建材发展导向(2019年10期)2019-08-24
电子制作(2018年8期)2018-06-26
山东工业技术(2016年15期)2016-12-01
