
变电检修智能运载机器人系统设计与仿真研究
2023-12-08 23:45严宇康文肖奕龚闯江维
武汉纺织大学学报 2023年5期
严宇 康文 肖奕 龚闯 江维

摘 要:为了提升变电检修智能化作业水平,减轻人工作业劳动强度,降低人员作业风险。文章提出了一种变电检修智能运载机器人系统设计方法,开发了机器人虚拟样机模型,着重对机器人的硬件控制系统进行设计,特别是针对机器人的运动功能、寻迹功能、避障功能等重要模块进行分析,最后在硬件设计方案的基础上,以单片机为机器人主控芯片,在PROTUES软件中进行仿真研究,分别对智能运载机器人的运动功能、寻迹功能、避障功能进行仿真研究,仿真结果表明所设计的系统能够较好的实现上述功能,文章对变电检修智能运载机器人系统设计与仿真研究为物理样机系统开发优化设计奠定了理论基础,同时,对于变电检修智能运载机器人实用化研究具有重要理论意义与实际应用价值。
关键词:变电站;智能运载机器人;系统设计;PROTEUS仿真
中图分类号:TP273 文献标识码:A 文章编号:2095-414X(2023)05-0065-05
0引言
伴随着经济发展和人民生活水平的提高,社会用电量不断提升,对电力运输的稳定性提出更高挑战。变电站[1-4]是电力系统中与人们关系最为直接的基础设施,是服务区域输送电力,保证人们日常生活和社会生产所需电力供应的重要环节。目前,我国东部地区平均每个省拥有5000座变电站,西部地区为3000座。大多数变电站处于露天环境,受自然环境的腐蚀、松动给变电的稳定性造成影响。变电站的日常巡检维护若不能得到充分的保障,一旦没有及时发现设备的异常状况并有效处理,将造成巨大的经济损失。因此,为保证供电稳定性及可靠性,变电站相应部门需要对其进行定期检修。为实现变电站内作业工具规范化管理,站内所需的作业工具通常按序分类存放在指定工具室内,这样常造成作业工具存放点距离检修作业点较远,作业工具存取不方便等问题。为提高变电站室内检修作业的智能化程度,减轻电力检修人员劳动强度,开发一种利用AGV移动平台的变电站室内全自主搬运移动机器人具有重要意义。AGV[5-8]是无人搬运车(Automated Guided Vehicle)的英文缩写,是指装备有电磁或光学等自动引导装置,能够沿规定的引导路径运行,具有安全保护以及各种移载功能的运输车,属于轮式移动机器人。AGV的导航是指其决定AGV运行方向和路径的方法,目前常用的AGV导航方式[9-12]主要有车外预定路径方式和非预定路径方式两种。所谓车外预定路径导航方式是指在行驶的路径上设置导航用的信息媒介物,AGV通过检测其信息而得到导向的导航方式,如电磁导引、光学导引、磁带导引等。所谓非预定路径导航方式是指AGV不预先确定行驶路径,而是根据调度要求,在运行过程中通过方位识别确定行驶路径。如激光导航、坐标或地理信息识别导航、视觉导航、路径规划等。
基于上述分析,本文設计了一款变电检修智能运载机器人AGV小车系统,着重对所设计的AGV小车的运动状态、寻迹功能、避障功能进行了测试实验仿真分析,验证了设计结果的可行性和有效性,本文的研究是对配电网检修维护的全新应用和探索,其研究和实施对于提升复配电电网系统工作能效、推进电力系统自动化和智能化具有重要理论意义与实际应用价值。
1 变电检修智能运载机器人虚拟样机系统设计
变电检修智能运载机器人采用四轮驱动,AGV导航模式行走于变电站内地面上,辅助甚至替代人工搭载作业工具,它的主要结构包含两个部分:其一,驱动系统,该系统由锂电池来提供电能进行驱动,锂电池将直流电传导至电机提供车轮的动力,电池组设计在小车内部,位于小车的前后两端,分别有一个电池组来提供电力;其二,运载部位,小车在顶端设计护栏样式来安放工具,在变电站内运输。小车内部设计为上下两层,下层安装电机与车轮连接,上层安装控制系统,车壁安装传导装置,起到控制作用。小车的前后部安装有传感装置来感应障碍物或者地面基础线来安排前进的路线,同时用于感应充电装置。小车顶部前后两端,设计有控制面板,可以由技术人员输入编程设定好前进路线,变电检修智能运载机器人虚拟样机模型如图1所示。
2 变电检修智能运载机器人控制系统设计
2.1 控制系统总体设计
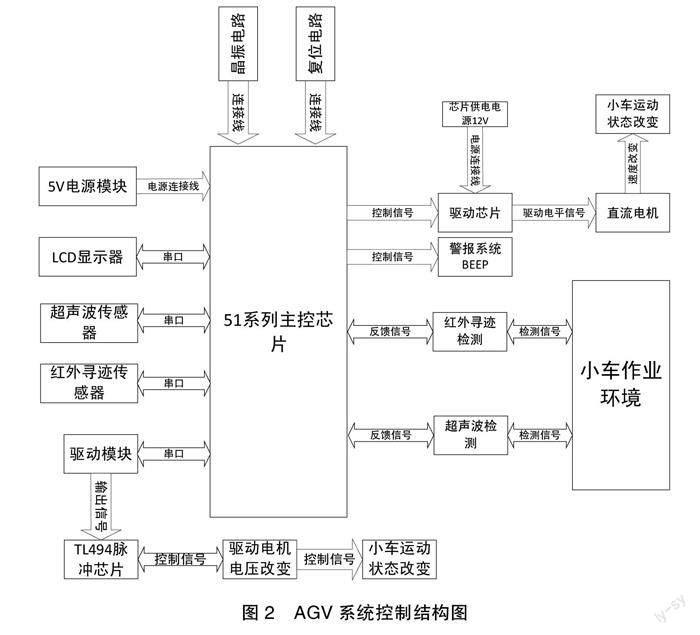
本文针对智能运载机器人的控制需求,采用基于单片机的机器人控制系统和自主避障和自主寻迹模块。小车的驱动设计就是为了使得小车能够首先运动起来,其次,再考虑让小车按照预设的方式进行运动。因此,首先在小车的动力部分方面,小车在物理结构上采用的是四个驱动轮,驱动轮使用的是四个直流电机进行驱动。这样单片机通过控制直流电机,进一步控制小车运动,达到驱动小车的目的。但由于单片机的直接输出可能无法有效的控制直流电机的转动,因此,考虑使用专门用来驱动电机的驱动芯片,从而使得单片机间接控制电动机的转动,运载机器人控制系统结构框图如图2所示。
2.2寻迹功能的实现
机器人的寻迹是在小车能够正常运动起来的前提下,进一步通过软件设计和硬件选择,从而可以让小车按照规定的路线来进行运动。为了实现这个功能,采用的是红外光电传感器,红外光电传感器可以很好的贴合本设计的要求,因此对于红外光电传感器进行了研究。另一方面也同时对于红外寻迹的工作原理和寻迹原理进行了研究,最后使得小车可以达到寻迹的功能。避障流程示意图如图3所示。
2.3避障功能的实现
小车的避障功能是指小车在遇到前方存在障碍物的时候,能够自动的识别障碍物,并且可以根据障碍物的位置做出相应躲避的运动行为。为了达到这一功能,本设计有两个方案可以选择,一个是利用红外光电传感器,一个是利用超声波模块。首先,小车能够识别障碍物需要从小车位置发射信号,在遇到障碍物可以识别出来,并且反射,这样
小车接收到反射信号就可以得到小车自身距离障碍物的距离。从而单片机可以输出相应的控制信号使得小车能够做出躲避行为。
因此,避障的重点在于距离的测量是否精准和快速,首先,精准可以让小车能够准确识别障碍物位置。其次,由于小车的行驶速度,单片机需要时间来输出控制信号,小车对于单片机输出的控制信号也需要时间来改变自身的运动状态。因此,在选用测距模块上,需要同时兼顾准确性和及时性,AGV避障流程示意图如图4所示。
2.4机器人小车运动状态分析
在不同的运行环境中,机器人所呈现的运动状态不同,由于环境的复杂性,小车根据障碍物和干扰因素,会出现四种运动状态,分别是前进、停止、后退,以及转向。因此,首先需要自动识别小车运动状态。根据需求从而对各状态下的小车进行预先设置,小车停止状态分为两种情况,其一,小车在出发点和终点的运动状态,此时停止的目的是用于加载货物和卸载货物。其二,在运输过程中出于避障目的,对于突发情况而产生的障碍物,小车无法通过转弯避障的时候,需要采用停止避障的方法。小车的前进状态用于小车正在运输的途中,为小车正常行驶的状态。通过反馈控制进行速度的调剂,使得小车在运输过程中可以达到一个稳定的速度。小车的后退状态多用于避障,当出现突发性障碍物时,配合小车的停止状态进行障碍物的躲避行为。对于一个具有自动导航功能的小车而言,转弯可以说是最为重要的部分。因此,根据障碍物不同小车需要进行不同方向的避障,在遇到障碍物,机器人小车可以根据预设的程序目标进行障碍物的躲避行为,左转或者右转。
3系统设计仿真实验
3.1 系统仿真平台搭建
基于前述分析,设计了AGV系统的电路图,并采用了Proteus 8 Professional仿真软件,并通过Keil uVision5编写的单片机程序生产可执行的HEX文件烧录到Proteus的电路图中,从而进行硬件系统和软件系统的联机仿真。主要对AGV系统寻迹功能,避障功能,反馈控制进行邏辑仿真。因此,通过搭建单片机和各部分元件的电路进行功能仿真。图5中AGV系统总体设计电路图,在仿真环境内,将单片机与小车的各功能部分相连,通过单片机进行控制,从而使得小车在仿真环境内可以做出相应的行为。
3.2 仿真测试实验与结果分析
首先测试小车的避障功能,设置30cm为小车避障临界值,当超声波测量数值不小于30cm时,小车正常行驶,其结果如图6小车正常前进示意图。
当左侧超声波测量距离低于30cm时,左侧超声波检测到障碍物,此时小车应该向右侧转弯,如图7为左侧避障结果示意图。
当超声波检测到障碍物距离小于10cm时,小车会直接停止,从而达到避障目的,因为此时小车已经无法及时转弯。此种情况适用于突然出现的障碍物,如在小车行驶过程中,可以用手来模仿突然出现的障碍物,如图8为小车停止避障示意图。
然后测试小车的寻迹功能,在仿真时通过手动调节滑动变阻器电阻阻值,来模拟检测黑线,当降低右侧电阻阻值时,根据寻迹过程分析可知,此时表示右侧红外传感器检测到了黑线,说明此时小车位置偏左,需要向右转,如图9为右侧寻迹示意图。
同理,通过手动调节滑动变阻器上电阻阻值来模拟检测黑线,当降低左侧电阻阻值时,根据寻迹过程分析可知,此时为左侧红外传感器检测到了黑线,说明此时小车位置偏右,需要向左转。通过仿真测试可知,AGV系统能够顺利的完成行走、避障、寻迹等典型功能,这些功能测试为变电智能运载机器人系统的设计奠定了坚实基础。
4 结论
(1)本文针对变电站智能运载需求提出了一种适用于变电站内部的智能运载机器人AGV小车的基本构型,开发了智能运载机器人的虚拟样机模型。
(2)本文针对智能运载机器人的控制需求,设计了基于单片机的机器人控制系统和自主避障和自主寻迹模块,为机器人系统设计奠定了理论基础。
(3)在PROTEUS软件中对设计的控制系统进行了仿真研究,验证了AGV小车自主寻迹,自主避障功能电路设计的可行性和有效性。
参考文献:
[1] Seok K H, Kim Y S. A state of the art of power transmission line maintenance robots [J]. Journal of Electrical Engineer- ing & Technology, 2016, 11(5): 1412-1422.
[2] Yue X, Wang H, Jiang Y. A Novel 110 kV Power Line Inspection Robot and its Climbing Ability Analysis[J]. International Journal of Advanced Robotic Systems, 2017,
14(3): 1-10.
[3] 王林, 王洪光, 宋屹峰, 等. 输电线路悬垂绝缘子清扫机器人行为规划[J]. 吉林大学学报: 工学版, 2018 (2): 518-525.
[4] 马飞越,游洪,佃松宜, 等.一种用于气体绝缘开关设备异物清扫与检测的机器人系统[J].计算机科学,2017,44(S2):592-595.
[5] 李特,马书根,李斌,等. 螺旋驱动管内机器人自适应运动机理与机构设计[J]. 机械工程学报, 2016,52(9):9-17.
[6] 郑晓军,高佳,宁诗铎.考虑软时间窗约束的多车型AGV路径优化[J].组合机床与自动化加工技术,2022(5):15-18.
[7] 潘迎新,白丹宇,曾庆成, 等.基于差分进化算法的自动化集装箱码头AGV调度问题[J]. 重庆师范大学学报(自然科学版), 2021,38(1):121-129.
[8] 王辉,袁斌,王伟博, 等.基于视觉和RFID复合导航的AGV设计与研究[J]. 机床与液压, 2022,50(7):87-91.
[9] 肖献强,程亚兵,王家恩.基于惯性和视觉复合导航的自动导引小车研究与设计[J].中国机械工程, 2019,30(22):2734-2740.
[10] 刘庭煜,张培,刘洋, 等.基于视觉增强检测的车间人员数字孪生模型快速构建方法[J]. 计算机集成制造系统, 2021,27(2):545-556.
[11] 郭鹏,汪世杰,周士祺, 等.基于并行搜索遗传算法的AGV自适应集群调度[J]. 华中科技大学学报(自然科学版), 2022,50(5):123-129.
[12] 吴瑞明,冯浩然,傅阳, 等.基于模糊PID控制的差动AGV稳定性控制研究[J]. 机床与液压, 2022,50(6):55-60.
Design and Simulation Research of Intelligent Carrier Robot System for
Substation Maintenance
YAN Yu1,2, KANG Wen1,2, XIAO Yi1,2, GONG Chuang3, JIANG Wei3
(1. State Grid Hunan EHV Substation Company, Changsha Hunan 410004, China; 2. Substation Intelligent Transportation and Inspection Laboratory of State Grid Hunan Company, Changsha Hunan 410004, China ; 3. School of Mechanical Engineering and Automation, Wuhan Textile University, Wuhan Hubei 430073, China)
Abstract:In order to improve the level of intelligent operation of substation maintenance, reduce the labor intensity of manual operation, and reduce the risk of personnel operation. This paper proposes a system design method for a substation maintenance intelligent carrier robot, develops a virtual prototype model of the robot, and focuses on the design of the robot's hardware control system, especially for the robot's motion function, tracking function, The important modules such as obstacle avoidance function are analyzed in depth. Finally, on the basis of the hardware design scheme, the single-chip microcomputer is used as the main control chip of the robot, and simulation research is carried out in PROTUES software. The obstacle avoidance function is simulated and studied. The simulation results show that the designed system can better realize the above functions. The design and simulation research of the intelligent carrier robot system for substation maintenance in this paper has laid a theoretical foundation for the development and optimization of the physical prototype of the system. The practical research of intelligent carrier robot for substation maintenance has important theoretical significance and practical application value.
Keywords:substation; intelligent delivery robot; system design; PROTEUS simulation
(責任编辑:周莉)
*通讯作者:江维(1984-),男,讲师,博士,研究方向:电力作业机器人.
基金项目:国网湖南省电力有限公司科技项目(5216A3220004).
猜你喜欢
电子制作(2018年8期)2018-06-26
电子制作(2017年8期)2017-06-05
数字技术与应用(2016年9期)2016-11-09
科技视界(2016年22期)2016-10-18
现代工业经济和信息化(2016年5期)2016-05-17
企业导报(2016年6期)2016-04-21
河南电力(2015年5期)2015-06-08
水电站机电技术(2014年1期)2014-09-26
河南科技(2014年19期)2014-02-27
